
USER VERIFICATION FROM WALKING ACTIVITY
First Steps towards a Personal Verification System
Pierluigi Casale, Oriol Pujol and Petia Radeva
Computer Vision Center, Bellaterra, Barcelona, Spain
Dept. of Applied Mathematics, University of Barcelona, Barcelona, Spain
Keywords:
Pervasive computing, Security and privacy, Embedded systems, Wearable devices, One-class classification.
Abstract:
In this work, first encouraging results in user verification by walking activity using a wearable device are
reported. A discriminative machine learning pipeline is proposed for user verification. A general walking
classifier based on AdaBoost is used for personalization adding data related to the verified users. An ensemble
of One-Class classifiers is created for user verification. This novel technique proves to achieve very high
performances from both classification accuracy and computational cost point of view. Results obtained shows
that users can be verified with high confidence, with very high value of performance metrics.
1 INTRODUCTION
Privacy in today’s digital society is one of the most
important and controversial topics. Consider, for in-
stance, that your smart-phone, containing all kind of
personal informations, is stolen. If the system was
able to verify its owner while it is being carried, it
could automatically block or send an alert message in
case of detecting a non verified user. In this context,
the verification of authorized users using walking ac-
tivity patterns is of great interest related to security
and privacy.
Recognizing physical activities like walking is an
emerging field of research. Recognizing all type of
everyday life activities might be in the short future
a fundamental application in pervasive computing.
Even if first works about activity recognition used au-
dio and video streams (Clarkson and Pentland, 1999),
in many recent works activity recognition is based
on classifying sensory data using one or many ac-
celerometers. Accelerometers have been widely ac-
cepted due to their miniaturization, their low-power
requirements and for their capacity to provide data
directly related to motion. Modern smart-phones as
i-Phones or Android-based phones have an integrated
tri-axial accelerometer sensor.
In (Mannini and Sabatini, 2010), authors give a
complete review about the state of the art of activity
classification using data from one or more accelerom-
eters. In their review, seven basic activities and transi-
tions between activities are classified from five biax-
ial accelerometer placed in different parts of the body,
using an high dimensional features vector and a Hid-
den Markov Model classifiers, achieving 98.4% of ac-
curacy. In (Lester et al., 2006), authors summarize
their experience in developing an automatic physical
activities recognition system. In their work, the lo-
cation of the sensor has very small impact on their
results. Additionally, the performance of the system
improves as data from different users is used and they
achieve the best result fusing information from ac-
celerometers and microphones.
Although much effort has been put in activity
recognition, user verification by mean of accelerom-
eter data has been rarely addressed. The closest
work to user verification concerns user identification.
There is a fundamental difference between identifica-
tion systems and verification ones. While in identifi-
cation systems one tries to discriminate among differ-
ent users, in verification the purpose is to check that
data belong to the authorized user of the system with-
out prior knowledge of data of the intruders. Note
that, if one tries to mimic the behavior of the veri-
fication system using identification, one must model
all possible non-authorized users – which is unfeasi-
ble in general settings. In (M
¨
antyj
¨
arvi et al., 2005),
user identification have been performed using corre-
lation, frequency domain and data distribution statis-
tics, ensuring an error rate of 7%. In (Gafurov et al.,
2006), a biometric user authentication system based
on a person gait is proposed. Applying histogram
179
Casale P., Pujol O. and Radeva P..
USER VERIFICATION FROM WALKING ACTIVITY - First Steps towards a Personal Verification System.
DOI: 10.5220/0003329901790185
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2011), pages
179-185
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

similarity and statistics about walking cycle, authors
ensure 5% of identification error rate. Recently, some
efforts in user verification have been done also in (De-
rawi et al., 2010), where, using the accelerometer of
an Android-based mobile phone, walking data have
been collected from 51 testers walking in an interior
corridor. From the best of our knowledge, that work
represents the first one using data collected using a
real mobile phone.
In our work, first encouraging results in user ver-
ification by walking activity are reported. In our lab,
a wearable system easy to use and comfortable to
bring has been developed. Motion, audio and pho-
tometric data of five basic every-day life activities
have been collected from ten volunteer testers. The
activities performed are walking, climbing up/down
stairs, staying standing, talking with people and work-
ing at computer. Testers performed activities where
they want and for the time they want. Developing a
custom wearable system allows simulating the use of
wearable devices people use everyday, such as mobile
phones, but with the complete freedom to customize
each software level, from the operating system to the
application level. We propose a discriminative ma-
chine learning pipeline for user verification. Discrim-
inant classifiers have proven to be extremely efficient
and powerful tools, even surpassing the performances
of generative machine learning techniques. Using this
framework, a two stage process is defined. In the first
stage, a general walking classifier is trained using a
baseline training set using en ensemble strategy based
on AdaBoost (Freund and Schapire, 1999). The clas-
sifier is subsequently personalized adding data of ver-
ified users in order to boost the performances of the
walking activity for those users. Since AdaBoost is
an incremental classifier, this process is extremely ef-
ficient since it just needs to add further weak classi-
fiers to the original baseline classifier. Once the walk-
ing activity is detected for the specific user, we must
verify if it is an authorized user. From the discrim-
inative point of view, user modeling without counter
examples can be done using One-Class classification
strategy (Tax, 2001). In One-Class classification, the
boundary of a given dataset is found and the confi-
dence that data belong to that set depends on the dis-
tance to the boundary. Thus, in the second stage, a
One-Class ensemble is created using as base classi-
fier a convex-hull on a reduced feature space. In this
work, we shown that this novel technique performs
well from both classification accuracy and computa-
tional cost point of view. Results obtained prove that
users can be verified with high confidence, with very
low false positive and false negative rates. The lay-
out of this paper is as follows. In the next section,
we describe the wearable device developed and the
data acquisition process. In Section 3, we describe
the features extraction process and in Section 4, the
classifiers used for the classifications. In Section 5
we show results obtained and finally, in Section 6, we
discuss results and conclude.
2 THE WEARABLE DEVICE
In this section, the wearable device and the data ac-
quisition process are described. The wearable sys-
tem, called BeaStreamer, is built around the Beagle
Board (TI, 2008). The device has small form factor
and it is comfortable to wear. Using BeaStreamer,
data have been collected from ten testers performing
five activities.
2.1 BeaStreamer
BeaStreamer is a wearable system designed for multi-
sensors data acquisition and processing. The system
acquires audio, video and motion data. The system
can be easily worn in one hand or in a little bag around
the waist. The audio and video data flows are acquired
using a standard low-cost web cam. Motion data
are acquired using a Bluetooth tri-axial accelerom-
eter. The core of the system is the Beagle Board,
a low-power, low-cost single-board computer built
around the OMAP3530 system-on-chip. OMAP3530
includes an ARM Cortex-A8 CPU at 600 MHz, a
TMS320C64x+ DSP for accelerated video and au-
dio codecs, and an Imagination Technologies Pow-
erVR SGX530 GPU to provide accelerated 2D and
3D rendering that supports OpenGL ES 2.0. DC sup-
ply must be a regulated 5 Volts. The board uses 2
Watts of power. An AKAI external USB battery at
1700mAh allows approximately 3 hours of autonomy
for the system in complete functionality. A Linux
Embedded operating system has been compiled ad-
hoc for the system and standard software interfaces
such as Video4Linux2 and BlueZ can be used for data
acquisition. It is possible to connect directly a moni-
tor and a keyboard to the board, using the board as a
standard personal computer. It is also possible enter
into the system by a serial terminal. The GStreamer
framework has been used for acquiring audio video
and Bluetooth motion data allowing to easily manage
synchronization issue in the data acquisition process.
The board can be programmed in C or Python.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
180
2.2 Data Acquisition
The system works with video, audio and accelerome-
ter data. It takes photos, grabs audio and receives data
from the accelerometer via Bluetooth. Accelerom-
eter data are sampled at 52Hz with a resolution of
±4g. All sensors are localized on the chest. Data
have been collected from ten volunteers, three women
and seven men with age between 27 and 35. Testers
were free to perform activities in the environment they
selected overpassing the laboratory setting limitation.
All the activities have been performed for at least 15
minutes. Activities performed are climbing up/down
stair,walking,talking with people,standing and work-
ing at computer. For labeling activities, only the se-
quential order of the activities has been annotated.
Every time an activity is performed, testers have to
start the system that after booting, automatically starts
the acquisition task while the user is already perform-
ing the activity. Even if audio and video have been
also acquired, in this work only accelerometer data
are taken into account.
3 FEATURES EXTRACTION
Tri-axial accelerometers produce three acceleration
time series, one for each motion axis. Before extract-
ing features, a smoothing filter has been applied to the
signal. Each acceleration time series has been win-
dowed using a 2 seconds window. Mean value, stan-
dard deviation, skewness, kurtosis, mean value of the
number of samples where the normalized waveform is
positive, difference between the maximum value and
the minimum value in a normalized waveform and
number of zero-crossing of the normalized waveform
have been computed as features. Once features from
1 to 4 are computed, the acceleration data is normal-
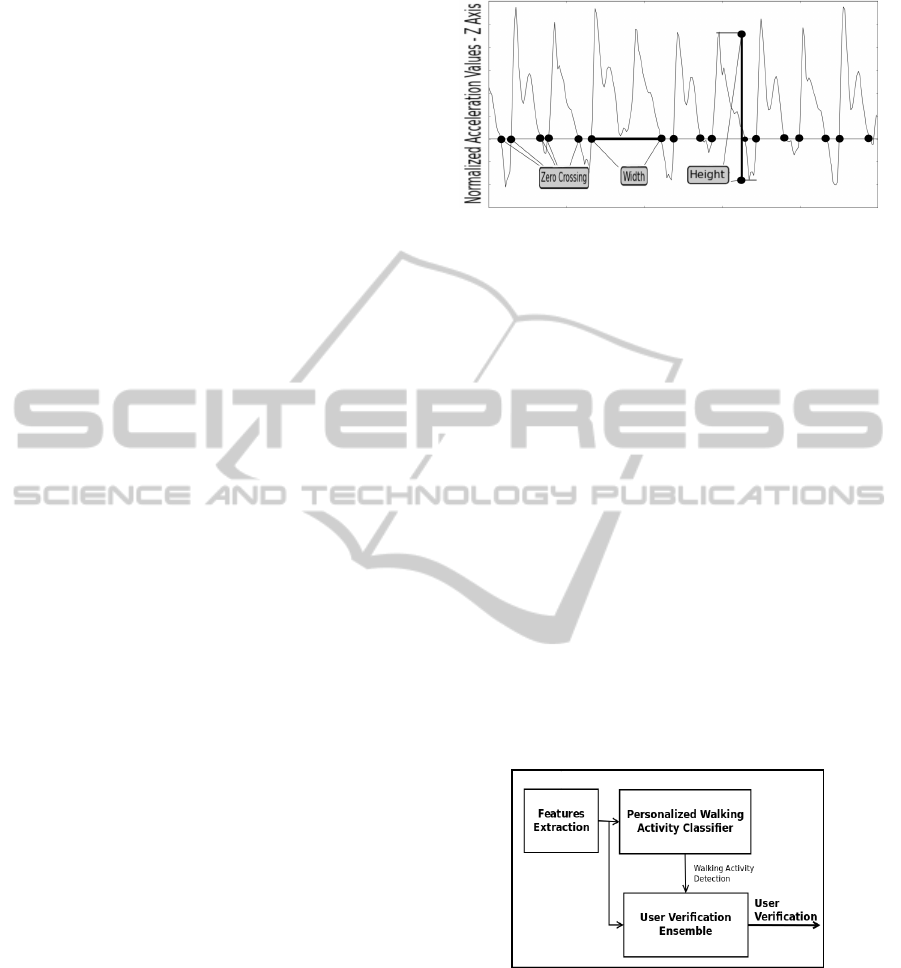
ized and features from 5 to 7 computed. In Figure 1,
six seconds of acceleration related to walking activity
on Z axis are reported and features extracted from the
waveform are drawn. Feature 5 is denoted as width,
Feature 6 as height and Feature 7 as zero-crossing.
Finally, a 22-dimensional feature space is obtained.
4 THE VERIFICATION PIPELINE
A two-stage pipeline is proposed for user verification.
The overall user verification system is shown in Fig-
ure 2. The general walking activity classifier, based
on AdaBoost, is trained using many walking activi-
ties from many persons. It receives as input the fea-
tures extracted from accelerometer data and it detects
Figure 1: Graphical description of Feature 5 (width), Fea-
ture 6 (height) and Feature 7(zero-crossing) extracted from
Motion Data.
when walking activities occur. The general classifier
is subsequently personalized adding data of the spe-
cific users. Using a further training step, the perfor-
mances of the walking activity are considerably en-
hanced for the specific user. In this way, the per-
sonalized walking activity classifier is able to filter
non walking activities and a big load of walking ac-
tivities from other users. The incremental training
process becomes extremely simple and efficient since
AdaBoost just needs to add more weak classifiers to
the original baseline classifier. When a walking ac-
tivity is detected, the verification task is provided by
the user verification ensemble. This classifier receives
as input the features computed on the accelerometer
data and checks if the walking activity belongs to the
verified user or not. User verification is performed
by an ensemble of naive One-Class classifiers using a
convex hull to define the region characteristic of the
specific user in a reduced features space.
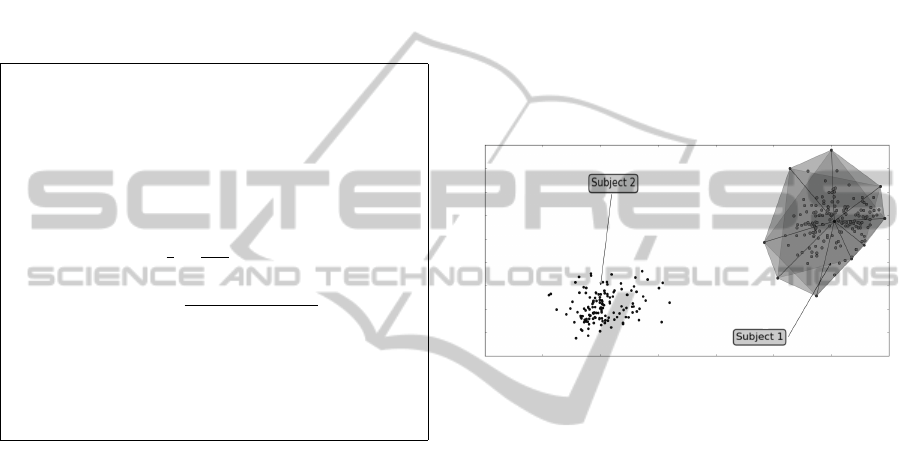
Figure 2: Block Diagram of the User Verification System.
4.1 Walking Classification
AdaBoost (Freund and Schapire, 1999) is an efficient
algorithm for supervised learning. AdaBoost boosts
the classification performance of a weak learner, by
combining a collection of weak classification func-
tions to form a stronger classifier. The algorithm com-
bines iteratively the weak classifiers by taking into ac-
count a weight distribution on the training samples
USER VERIFICATION FROM WALKING ACTIVITY - First Steps towards a Personal Verification System
181
such that more weight is attributed to samples mis-
classified by previous iterations. The final strong clas-
sifier is a weighted combination of weak classifiers
followed by a threshold. Table 1 shows the pseudo-
code for AdaBoost. The algorithm takes as input
a training set (x
1
,y
1
),...,(x
m
,ym) where x
k
is a N-
dimensional features vector, and y
k
are the class la-
bels. After T rounds of training, T weak classifiers
h
t
and ensemble weights α
t
are used to assemble the
final strong classifiers. AdaBoost training algorithm
Table 1: AdaBoost Algorithm.
- Given a training set (x
1
,y
1
),..., (x
m
,y
m
), with x
k
∈ R
N
,
y
k
∈ Y = {1,+1} ;
- Initialize weights D
1
(k) = 1/m, k = 1,... ,m ;
- For t = 1,. .., T :
1. Train weak learner using distribution D
t
2. Get weak hypothesis h
t
: X → {−1, +1}
with error ε
t
= Pr
k∼D
t
[h
t
(x
k
) 6= y
k
]
3. Choose α
t
=
1
2
ln(
1−ε
t
ε
t
)
4. Update :
D
t+1
(k) =
D
t
(k) exp(−α
t
y
k
h
t
(x
k
))
Z
t
where Z
t
is a normalization factor chosen
so that D
t+1
will be a distribution.
- Output the final hypothesis
H(x) = sign(
∑
T
t=1
α
t
h
t
(x))
is incremental. After n training steps on a dataset, it is
possible to add further m training steps using another
dataset by adding new weak classifiers. This char-
acteristic is crucial in the personalization step of the
proposed pipeline. For classifying walking activity,
AdaBoost is trained only using features from 5 to 7.
As second step, the classifier has been further trained
using all the features related to the specific subject, for
each subject. The weak classifiers used are decision
stumps.
4.2 User Verification
Based on the intuition derived from visual feature
analysis, a One-Class classifier ensemble has been
trained using the convex hull generated on a reduced
features space. The underlying idea is shown in Fig-
ure 3. Data related to each user are localized in a spe-
cific region of the features space. Training the One-
Class classifier means building the convex hull and
defining the region of the space where user data lies.
When a new point appears, if the point is inside the
convex hull, then it represents a walking activity of
the user. If the point does not belong to the interior of
the convex hull, it has a confidence value to belong to
the user that is inversely proportional to the distance
from the border of the convex hull. Using the convex
hull is theoretically justified in (Bennett and Breden-
steiner, 2000). The authors state that finding the maxi-
mum margin between two sets is equivalent to finding
the closest points in the convex hull. Therefore, mod-
elling the convex hull around features points is equiv-
alent to use an SVM classifier if classes do not over-
lap. The computational complexity for building the
convex hull is O(n log n) as reported in (Toussaint,
1985), only using m n points stored in memory,
with n being the number of training points. For those
reasons, such algorithm can easily run in devices with
limited computational and memory resources. The
Figure 3: User verification using a convex hull as One-Class
classifier.
One-Class classifier has been trained for each pair-
wise combination of features, obtaining in this way
an ensemble of One-Class classifiers. The final re-
sult is obtained averaging the results of every single
One-Class classifier. The algorithm for the convex
hull One-Class classifier is reported in Table 2.
5 EXPERIMENTAL RESULTS
In order to validate walking activity classification
accuracy and user verification performances, cross-
validation has been used. Cross-validation is a tech-
nique for assessing how the results of a classifica-
tion process generalize on an independent data set.
A round of cross-validation is performed partition-
ing the entire dataset into different subsets, perform-
ing training on one set and testing the classifier on
an other dataset. There exist many different cross-
validation schemes. In this setting, a Leave-One-
User-Out (LOUO) cross validation scheme has been
used. LOUO cross-validation involves using a single
user for testing purposes and the remaining users as
training data. This is repeated such that each user in
the dataset is used once as testing data. In the fol-
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
182

Table 2: Ensemble One-Class Algorithm.
Train:
-Given a training set X[m, n], with X ∈ R
M×N
;
1. For i = 0 : N
2. For j = i + 1 : N − 1
3. Compute the convex hull Ch{i, j} for the
dataset X
new
= {X [i, n],X[ j,n]}
Return Ch
Classify:
- Given a dataset D[m,n], with D ∈ R
M×N
;
- Initialize Res[i,j]=0
1. For i = 0 : N
2. For j = i + 1 : N − 1
3. If (D[i],D[ j]) is inside Ch[i, j]
4. Res[i, j] = 1
5. Else
6. Res[i, j] = e
−dx
where d = distance from the border
-Return the mean of all results for each point
lowing subsections, all the results relative to general
walking classification, personalized walking classifi-
cation and user verification are reported.
5.1 General Walking Classification
Results
The first step of the system aims at distinguishing
the walking activity disregarding the user informa-
tion. This value is used as reference value for further
improvements by means of personalization. Classifi-
cation performances on general walking classification
have been evaluated using LOUO scheme with Ad-
aBoost with 50 Decision Stumps trained only using
features from 5 to 7 – features that do not depend on
the specific user. Overall classification performances
obtained are reported in Table 3.
Table 3: Classification Performances for General Walking
Classifier.
Precision Recall Specificity Sensitivity
95.4% 95.5% 98.4% 98.5%
5.2 Personalized Walking Classification
Results
The results obtained from the classifier are good but
further improvement can be achieved if the training
set has access to actual authorized user data. Since
these data must be acquired compulsory for the veri-
fication process, they can be used to increase the per-
formances of step 1. In this step, the classification
performances for a walking activity for every single
subject have been evaluated. Datasets have been sep-
arated for the user and the rest of persons. For eval-
uating the performance taking into account data from
the authorized user a five-fold cross validation process
is performed for each fold of LOUO cross-validation.
This means that the classifier has been trained on 80%
of the data of all the persons and on 80% of the data
for the specific subject. The resulting classifier has
been tested on the remaining 20% of the data of both
the rest and the specific subject. This process is re-
peated 5 times for each user and results averaged.
The classification performances are reported in Fig-
ure 4. Adding a further training to the classifier has
the effect that might be expected. The classification
performances for general walking classification de-
crease while the classification performances for the
specific subject are considerably improved. The walk-
ing classifier works with very high performances only
on walking data of the specific subject, heavily filter-
ing the walking activities of other subjects. For the
majority of the subjects, the classification accuracy
for a walking activity is above 98%.
Figure 4: Personalized Walking Classification Accuracy.
5.3 User Verification Results
The verification process must ensure two things. First
of all, the system must not block given an authorized
user. This means that the false negatives value should
be as small as possible. This is measured by the Sen-
sitivity parameter, defined in Equation 1.
Sensitivity =
True Positives
True Positives + False Negatives
(1)
On the other side, the system has to avoid as many in-
trusions as possible. This is measured by the number
of false positives and reflected in the Positive Predic-
tive Value parameter, defined in Equation 2.
PositivePredictiveValue =
True Positives
True Positives + False Positives
(2)
USER VERIFICATION FROM WALKING ACTIVITY - First Steps towards a Personal Verification System
183
Both parameters are critical and measure the degree
of goodness of the system. For verification purposes,
a five-fold cross validation process is performed for
each fold of LOUO cross-validation. Again, an En-
semble One-Class classifier has been trained on the
80% of the data of the authorized user and tested on
the remaining 20% of that user and on all data from
the rest of the subjects. This process is repeated five
times for each user using five different, non overlap-
ping data subsets for testing. The verification accu-
racy obtained is reported in Table 4. Both sensitivity
Table 4: Performances of the Verification System.
User Sensitivity PPV User Sensitivity PPV
Subj 1 0.922 0.981 Subj 6 0.914 0.991
Subj 2 0.976 0.718 Subj 7 0.835 0.931
Subj 3 0.97 1. Subj 8 0.91 0.972
Subj 4 0.936 0.938 Subj 9 0.971 0.947
Subj 5 0.981 0.912 Subj 10 0.853 0.912
and positive predictive value are high. However, this
value of sensitivity is not acceptable since we must
minimize the system mistakes on authorized users.
In order to improve this parameter, verification has
been performed on subsequent temporal windows us-
ing an ensemble of Ensemble One-Class with a Ma-
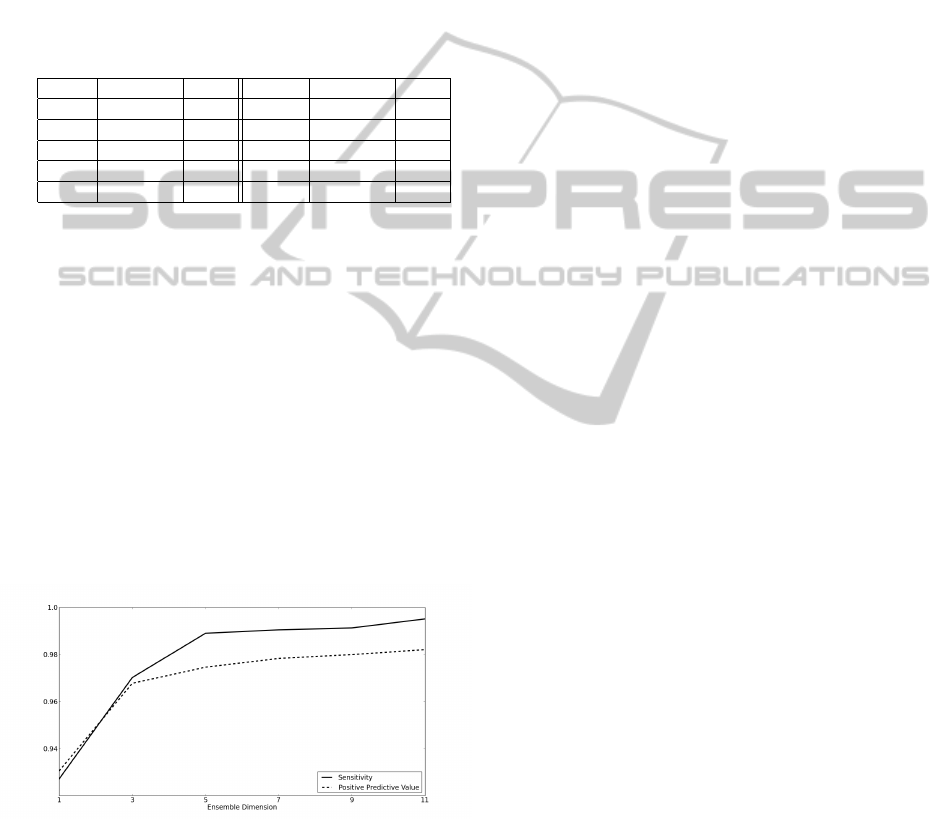
jority Voting decision process. In Figure 5, it is shown
how verification accuracy varies with respect to the
size of the ensemble. Using bigger ensembles, equiv-
alent to use wider temporal windows, improve signifi-
cantly the accuracy for both parameters, ensuring very
high sensitivity and positive predictive value. Starting
from an ensemble of size 3, all the user sensitivities
are above 98% and starting from an ensemble of size
5, all the positive predictive values are above 97%.
Figure 5: Sensitivity and PPV versus Ensemble Dimension.
6 DISCUSSION
AND CONCLUSIONS
In this work, an User Verification System by walk-
ing activity using a discriminative machine learning
pipeline has been proposed. Using a wearable sys-
tem, motion data have been collected from 10 testers.
Using motion data, classification of walking activity
and user verification have been performed.
Results related to walking classification demon-
strate that a walking activity can be separated from
other activities and successfully classified. In particu-
lar, when the classifier is personalized for the specific
subject, classification results are highly accurate and,
for the specific user, the walking classifier reaches
very high performances.
User verification has been performed with high
accuracy. In particular, experiments show that results
can be significantly improved when temporal infor-
mation is taken into account in the verification pro-
cess. Nevertheless, there exist still some subjects that
can not be verified as desired. For instance, subject 10
and, in a special way, subject 7, have sensitivity lower
respect to the others subjects. For subject 7, the worst
case, verification accuracy obtained using an ensem-
ble of 11 ensemble of One-Class classifiers is still
much lower with respect to the other subjects. Due to
the outliers, the convex hull has not well defined bor-
ders and the verification performances of these sub-
jects are affected. More study must to be done on this
subject.
From our point of view, using the convex hull as
One-Class classifier has been a very practical way
of tackling the problem of user verification ensuring
very good results but more sophisticated techniques
be suitable for this purpose. Using a One-Class SVM
should characterize better the boundaries of users re-
gion, providing also robustness to outliers at the cost
of increasing the processing time when specializing
the system for an authorized user. Note that this pro-
cess must be performed on the wearable system and
training a One-Class SVM is computationally hard.
Finally, a more accurate validation of the system
must be done using more testers and putting the sen-
sor in different body locations. Putting the sensor on
the chest is a realistic assumption, taking into account,
for instance, that a mobile phone can be worn in the
jacket pocket. However, for the development of a ro-
bust verification system, more locations need to be
taken into account, such as pant pockets or even in
the hands, providing more interesting and a challeng-
ing case of study.
ACKNOWLEDGEMENTS
This work has been supported in part by projects
TIN2009-14404-C02, La Marat
´
o de TV3 082131 and
CONSOLIDER-INGENIO CSD 2007-00018.
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
184

REFERENCES
Bennett, K. P. and Bredensteiner, E. J. (2000). Duality and
geometry in svm classifiers. In 17th ICML, pages 57–
64. Morgan Kaufmann.
Clarkson, B. and Pentland, A. (1999). Unsupervised clus-
tering of ambulatory audio and video. In ICASSP ’99,
pages 3037–3040.
Derawi, M. O., Nickel, C., Bours, P., and Busch, C. (2010).
Unobtrusive user-authentication on mobile phones us-
ing biometric gait recognition. In Sixth Interna-
tional Conference on Intelligent Information Hiding
and Multimedia Signal Processing.
Freund, Y. and Schapire, R. E. (1999). A short introduction
to boosting.
Gafurov, D., Helkala, K., and Søndrol, T. (2006). Biometric
gait authentication using accelerometer sensor. Com-
puters, 1(7).
Lester, J., Choudhury, T., and Borriello, G. (2006). A prac-
tical approach to recognizing physical activities. In In
Proc. of Pervasive, pages 1–16.
Mannini, A. and Sabatini, A. M. (2010). Machine learning
methods for classifying human physical activity from
on-body accelerometers. Sensors, 10(2):1154–1175.
M
¨
antyj
¨
arvi, J., Lindholm, M., Vildjiounaite, E., M
¨
akel
¨
a, S.,
and Ailisto, H. (2005). Identifying users of portable
devices from gait pattern with accelerometers. In
ICASSP.
Tax, D. (2001). One-class classification. phd, Delft Univer-
sity of Technology, Delft.
TI (2008). http://beagleboard.org.
Toussaint, G. T. (1985). A historical note on convex hull
finding algorithms. PRL, 3(1):21–28.
USER VERIFICATION FROM WALKING ACTIVITY - First Steps towards a Personal Verification System
185
