
MULTITASK LEARNING APPLIED TO SPATIAL FILTERING IN
MOTOR IMAGERY BCI
A Preliminary Offline Study
Dieter Devlaminck, Bart Wyns
Electrical Energy, Systems and Automation, Ghent University, Technologiepark 913, 9052 Zwijnaarde - Gent, Belgium
Georges Otte
P.C. Dr. Guislain, Fr. Ferrerlaan 88A, 9000 Gent, Belgium
Patrick Santens
Department of Neurology, Ghent University Hospital, De Pintelaan 185, 9000 Gent, Belgium
Keywords:
Multi-subject learning, Common Spatial Patterns (CSP), Brain-Computer Interfaces (BCI).
Abstract:
Motor imagery based brain-computer interfaces (BCI) commonly use the common spatial pattern filter (CSP)
as preprocessing step before feature extraction and classifiction. The CSP method is a supervised algorithm
and therefore needs subject specific training data for calibration, which is very time consuming to collect.
Instead of letting all that data and effort go to waste, the data of other subjects could be used to further
improve results for new subjects. This problem setting is often encountered in multitask learning, from which
we will borrow some ideas and apply it to the preprocessing phase.
This paper outlines the details of the multitask CSP algorithm and shows some results on data from the third
BCI competition. In some of the subjects a clear improvement can be seen by using information of other
subjects, while in some subjects the algorithm determines that a specific model is the best. We also compare
the use of a global filter, which is constructed only with data of other subjects, with the case where we ommit
any form of spatial filtering. Here, the global filter seems to boost performance in four of the five subjects.
1 INTRODUCTION
The development of BCI systems is an active research
domain that has the goal to help people, suffering
from severe disabilities, to restore the communica-
tion with their environment through an alternative in-
terface. Such BCI systems can be divided in sev-
eral categories based on the signal features they use.
Some of these features like the P300 (Farwell and
Donchin, 1988) and steady-state visual evoked po-
tentials (SSVEP) (Kelly et al., 2005) are elicited nat-
urally by external stimuli while others like the sen-
sorimotor rhythms (SMR) can be independently gen-
erated by the subject. In case of SMR this can be
achieved by performing the task of imagining differ-
ent movements, such as left and right hand movement,
or foot and tongue movement. The cortical areas in-
volved in motor function (and also motor imagery)
show a strong 8-12 Hz (or even 18-26 Hz) activity
when the person is not performing any motor (im-
agery) task. However, when the person is engaged in
a motor task the neural networks in the correspond-
ing cortical areas are activated. This blocks the idle
synchronized firing of the neurons and thus causes
a measurable attenuation in those frequency bands.
This decrease in power is also called event-related
desynchronization (ERD) (Pfurtscheller and Lopes da
Silva, 1999), the opposite is termed event-related syn-
chronization (ERS). The location (electrode) of this
feature depends on the type of motor task. For exam-
ple, if a person moves his left arm, the brain region
contralateral to the movement (around electrode C4)
will display this ERD feature, while the neurons in
the ipsilateral cortical motor area continue to fire syn-
chronously.
Because of the low spatial resolution of elec-
troenchephalography (EEG), a commonly used
method to improve this resolution is the common
378
Devlaminck D., Wyns B., Otte G. and Santens P..
MULTITASK LEARNING APPLIED TO SPATIAL FILTERING IN MOTOR IMAGERY BCI - A Preliminary Offline Study.
DOI: 10.5220/0003335403780382
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 378-382
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

spatial pattern (CSP) algorithm introduced by Koles
(Koles, 1991) to detect abnormal EEG activity.
Later, it was used for discrimination of imagined
hand movement tasks (M
¨
uller-Gerking et al., 1999;
Ramoser et al., 2000). Since then a lot of groups im-
proved the basic CSP algorithm by extending it with
temporal filtering (Dornhege et al., 2006), making
it more robust for nonstationarities (Blankertz et al.,
2008) or reducing calibration time by transferring
knowledge learned during previous sessions (Kraule-
dat et al., ). After almost a decade this method still
proves it superiority judging from the results of the
fourth BCI competition
1
. Still, this BCI setup is less
accurate than the P300-based BCI and initially needs
a longer training time. Some people are even unable
to achieve proper control.
One way to further improve a subject specific CSP
filter is to use the data recorded from other subjects,
additionally to the subject’s own data. To this end
we will use some ideas of multitask learning, an ac-
tive topic in machine learning (Evgeniou et al., 2005;
Kato et al., 2008). In (Alamgir et al., 2010), the au-
thors employed this concept to realize a classifier that
was able to learn from multiple subjects, leading to an
algorithm that performed well on new subjects even
without training. The classifier could then be adapted
when new data came available, reaching even higher
classification accuracies with very few training sam-
ples. However, they did not apply any form of spatial
filtering, using only features obtained from the EEG
signal after filtering it in distinct pass-bands. We ap-
ply a similar idea in the preprocessing phase to con-
struct spatial filters that make a trade-off between a
global and subject specific filters.
In Section 2 we give the details of the multitask
CSP algorithm. The results are then compared with
the basic CSP algorithm in Section 3 on data of the
third BCI competition. We highlight the strenghts and
the weaknesses of the method in Section 4.
2 MULTITASK CSP
The goal of the basic CSP method is to learn a set of
spatial filters for one subject that maximizes the signal
variance for trials of one class while at the same time
minimizes the signal variance for trials of the other
classes. For the two class case, this can be formulated
as follows
max
w
w
T
Σ
(1)
w
w
T
Σ
(2)
w
,
1
On http://www.bbci.de/competition/iv/ you can find the
data sets and results of the 4th BCI competition.
Algorithm 1: Rprop+.
η
+
= 1.2 , η
−
= 0.5 , η
max
= 50 , η
min
= 10
−30
initialize w as explaind in Section 2
repeat
t ← t + 1
Compute gradient ∇R(w) =
δ
(t)
R(w)
δw
for all i = 1 to d(S +1) do
if
δ
(t)
R(w)
δw
i
·
δ
(t−1)
R(w)
δw
i
> 0 then
η
i
← min(η
i
η
+
, η
max
)
w
i
← w
i
+ η
i
sign(
δ
(t)
R(w)
δw
i
)
else if
δ
(t)
R(w)
δw
i
·
δ
(t−1)
R(w)
δw
i
< 0 then
w
i
← w
i
− η
i
sign(
δ
(t−1)
R(w)
δw
i
)
η
i
← max(η
i
η
−
, η
min
)
δ
(t)
R(w)
δw
i
← 0
else
w
i
← w
i
+ η
i
sign(
δ
(t)
R(w)
δw
i
)
end if
end for
until convergence
where Σ
(1)
and Σ
(2)
correspond to the covariance ma-
trices of the trials corresponding to the first and re-
spectively the second class.
We now want to use data of other subjects to im-
prove the filters for specific subjects. To accomplish
this, we first need a spatial filter w
s
for each subject,
which we decompose into the sum of a global and
subject specific filter,
w
s
= w
0
+ v
s
,
where w
0
∈ R
d
represents the global spatial filter
which is learned across all data (including those of
other subjects) and v
s
∈ R
d
represents the subject spe-
cific filter. The number of channels is represented by
d. A single optimization framework is proposed in
which we learn both types of filters. This can be for-
mulated as
max
w
0
,v
s
S
∑
s=1
w
T
s
Σ
(1)
s
w
s
w
T
s
Σ
(2)
s
w
s
+
1
λ
||w
0
||
2
+ λ||v
s
||
2
.
The parameter λ makes a trade-off between global
or specific filters. For a high value of λ >> 1 the
vector v
s
is forced to zero and a global filter is con-
structed. When λ is very low (close to zero) the vec-
tor w
0
is forced to zero and subject specific filters are
computed. The number of subjects is denoted by S.
This can be rewritten to a simpler form as,
max
w
R(w) = max
w
S
∑
s=1
r
s
(w) = max
w
S
∑
s=1
w
T
¯
Σ
(1)
s
w
w
T
¯
Σ
(2)
s
(λ)w
,
MULTITASK LEARNING APPLIED TO SPATIAL FILTERING IN MOTOR IMAGERY BCI - A Preliminary Offline
Study
379

Table 1: Accuracy obtained by cross-validation for different parameter values λ.
subject \ λ 10
−6
10
−4
10
−2
1 10
2
10
4
10
6
aa 0.607 0.597 0.624 0.616 0.633 0.614 0.605
al 0.979 0.979 0.885 0.676 0.821 0.979 0.979
av 0.645 0.635 0.513 0.538 0.620 0.645 0.657
aw 0.681 0.710 0.643 0.618 0.647 0.666 0.683
ay 0.939 0.939 0.857 0.685 0.756 0.823 0.802
with
w
T
=
w
T
0
v
T
1
. . . v
T
S
,
¯
Σ
(2)
s
(λ) =
¯
Σ
(2)
s
+
1
λ
D
0
+ λD
s
,
¯
Σ
(i)
s
= E
s
Σ
(i)
s
E
T
s
and
E
s
=
I
d×d
0
(s−1)d×d
I
d×d
0
(S−s)d×d
,
D
0
=
I
d×d
0
Sd×d
I
d×d
0
d×Sd
,
D
s
=
0
sd×d
I
d×d
0
(S−s)d×d
0
d×sd
I
d×d
0
d×(S−s)d
.
We find the maximum through gradient search. To
avoid finding the optimal step length in each iteration
and speeding up convergence we employ the RProp+
algorithm, proposed in (Riedmiller and Braun, 1993)
for supervised learning in feedforward artificial neu-
ral networks. The gradient can be computed as
∇R(w) =
S
∑
s=1
¯
Σ
(1)
s
w − r
s
(w)(
¯
Σ
(2)
s
+
1
λ
D
0
+ λD
s
)w
w
T
(
¯
Σ
(2)
s
+
1
λ
D
0
+ λD
s
)w
.
The RProp+ method is summarized in Algorithm 1
and uses the weight-backtracking approach. An intu-
itive way to intialize the component vector w
0
in w
is to take the average of the covariance matrices of
all subjects and compute the best filter with the ba-
sic CSP algorithm. Initializing the other component
vectors v
s
in w is even easier, just run the basic CSP
algorithm on the covariance matrices of each subject
separately and select the best filter as starting point.
3 EXPERIMENTS
We use data of the third BCI competition
2
, more pre-
cisely data set IVa. The set contains data recorded
2
On http://www.bbci.de/competition/iii/ you can find
the data sets and results of the 3e BCI competition.
from 118 electrodes where the subjects performed
two tasks: right hand motor imagery and foot im-
agery. Five subjects are included in the set and each
subject recorded 280 trials. From each of these sub-
jects, we use 100 trials for training and 180 for test-
ing. To limit the number of parameters that needs to
be computed by the RProp+ algorithm, the number of
channels is reduced to 22. The ones selected are Fp1,
Fpz, Fp2, F7, F3, Fz, F4, F8, T7, C3, Cz, C4, T8, P7,
P3, Pz, P4, P8, POz, O1, Oz and O2. All remaining
signals are band-pass filtered between 8 and 30 Hz.
The trade-off parameter λ is determined through
cross-validation, which is the reason we still need
a sufficient amount of data to accurately select the
paramter value. For each subject only two spatial fil-
ters are computed: one for each class. The reason
for the limit of one filter per class is the bad con-
vergence of the algorithm after one iteration of pro-
jection deflation (a technique also use in principal
component analysis to compute subsequent princi-
pal components). Table 1 shows the cross-validation
accuracy for each subject and different parameters
λ ∈ {10
−6
, 10
−4
, 10
−2
, 1, 10
2
, 10
4
, 10
6
}. Clearly, for
some subjects a global filter is preferred (subject av),
while for others a more intermediate filter is chosen
(subject aa) or even a subject specific filter (subjects
aw and ay). For subject al it does not matter which
model parameter to choose as both global and specific
filters perform equally well.
Figure 2 shows the spatial filters for two subjects
av and ay, computed both with the basic CSP variant
and with the multitask variant. As subject ay prefers a
subject specific model, one can see that the multitask
CSP variant (msCSP) converges to the same filter as
the basic CSP variant (bCSP) for very low values of
λ. However, for subject av the difference between the
two filter variants can not be unnoticed. The global
filters in the second and fourth column show a more
physiological plausible solution, which is also sup-
ported by a higher accuracy on the test set as one can
see in Table 3. In general, the multitask variant seems
to improve the overall accuracy for each subject, ex-
cept for subject aa, in which case a small decrease in
performance is observed. The improvement in sub-
jects such as av and aw, that initially do not perform
well, can be due to the influence of subjects who do
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
380
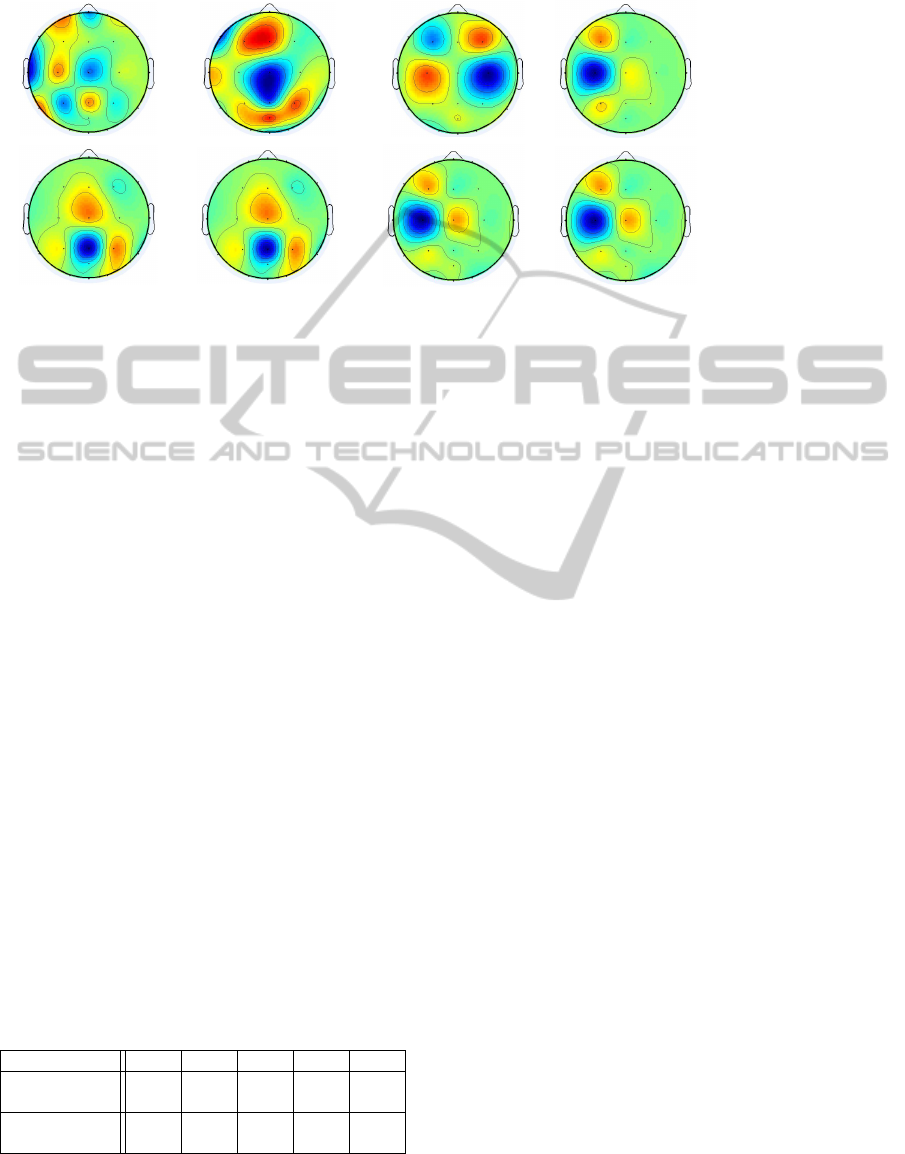
Class 1 Class 2
bCSP msCSP bCSP msCSP
Subject av
Subject ay
Table 2: The first row displays spatial filters for subject av and the second row for subject ay. The first and second column
represent spatial filters for class one, the first one being a subject specific filter computed by the basic CSP algorithm (bCSP),
while the second column displays the filter computed with the multitask CSP variant (msCSP). For subject av λ = 10
6
(corresponding to a global model) and for subject ay λ=10
−6
(corresponding to a specific model). The third and fourth
column then show the spatial filters for the second class.
perform well, such as al and ay. This idea is con-
firmed by looking at the msCSP filter of subject av
for class two in Figure 2, which strongly resembles
the subject specific filter of ay.
We also compare the application of a single global
filter (for each class) with no spatial filtering. Here,
the global filter is computed based on data of all
subjects, except the data of the subject being tested
(λ = 10
15
). In this case, the training data is only used
to build the classifier. When no spatial filtering is ap-
plied, we select the four channels C3, Cz, C4 and POz
to compute the variance.
Although the global filter completely fails for sub-
ject aw, we see a clear improvement in all other sub-
jects. This suggests it maybe possible to construct a
global classifier in conjunction with this global filter
to make predictions for new subjects without train-
ing. Predictions can then be further improved while
new data comes available. Furthermore, it can poten-
tially overcome the intial frustration of failure during
earlier trials.
Table 3: Accuracy obtained on the test sets for each subject,
comparing the basic CSP method with its multitask variant.
Furthermore, two other methods are compared: the applica-
tion of a single global model versus no spatial filtering.
method \ subject aa al av aw ay
basic CSP 68.33 95.56 56.67 63.89 90.00
multitask CSP 64.44 95.56 67.78 73.89 90.00
no CSP 61.11 85.56 54.44 71.10 86.11
global CSP 66.67 93.33 66.11 53.89 90.56
4 CONCLUSIONS
We presented a multitask variant of the CSP algorithm
that uses data recorded from multiple subjects to im-
prove the results of a specific subject. The algorithm
has two shortcomings. Firstly, the number of spa-
tial filters that can be extracted is limited to one, but
could potentially be overcome by using joint approx-
imate diagonalization. Secondly, because the trade-
off parameter is determined through cross-validation,
the algorithm still needs sufficent training data to se-
lect the parameter reliably. However, with enough
data to determine the trade-off parameter, we can see
a clear improvement in all subjects except for one,
where there’s only a limited decrease in performance.
On top of that, we also employed the method for
learning a single global filter based on data of all sub-
jects except one, testing it on the remaining subject.
In this case we can also see a clear improvement com-
pared to the case where no spatial filtering is applied.
This suggests that the method could be used to im-
prove results when no training data is available. This
is off course under the assumption that the classifier
is also built from other subjects.
REFERENCES
Alamgir, M., Grosse-Wentrup, M., and Altun, Y. (2010).
Multitask learning for brain-computer interfaces. In
Proceedings of the Thirteenth International Confer-
ence on Artificial Intelligence and Statistics, vol-
ume 13, pages 17–24, Sardinia, Italy.
MULTITASK LEARNING APPLIED TO SPATIAL FILTERING IN MOTOR IMAGERY BCI - A Preliminary Offline
Study
381

Blankertz, B., Kawanabe, M., Tomioka, R., Hohlefeld, F.,
Nikulin, V., and M
¨
uller, K. (2008). Invariant common
spatial patterns: Alleviating nonstationarities in brain-
computer interfacing. In Advances in Neural Informa-
tion Processing Systems, volume 20, pages 113–120,
Vancouver, Canada.
Dornhege, G., Blankertz, B., Krauledat, M., Losch, F., Cu-
rio, G., and M
¨
uller, K. (2006). Optimizing spatio-
temporal filters for improving Brain-Computer Inter-
facing. In Advances in Neural Information Process-
ing Systems, volume 18, pages 315–322, Vancouver,
Canada.
Evgeniou, T., Micchelli, C., and Pontil, M. (2005). Learn-
ing multiple tasks with kernel methods. Journal of
Machine Learning Research, 6:615–637.
Farwell, L. and Donchin, E. (1988). Talking off the top of
your head: toward a mental prosthesis utilizing event-
related brain potentials. Electroencephalography and
Clinical Neurophysiology, 70(6):510–523.
Kato, T., Kashima, H., Sugiyama, M., and Asai, K. (2008).
Multi-task learning via conic programming. In Ad-
vances in Neural Information Processing Systems 20,
volume 20, pages 737–744, Vancouver, Canada.
Kelly, S., Lalor, E., Reilly, R., and Foxe, J. (2005). Visual
spatial attention tracking using high-density SSVEP
data for independent brain-computer communication.
IEEE Transactions on Neural Systems and Rehabili-
tation Engineering, 13(2):172–178.
Koles, Z. (1991). The quantitative extraction and topo-
graphic mapping of the abnormal components in the
clinical EEG. Electroencephalography and Clinical
Neurophysiology, 79(6):440–447.
Krauledat, M., Schroder, M., Blankertz, B., and M
¨
uller, K.
Reducing Calibration Time For Brain-Computer Inter-
faces: A Clustering Approach. In Advances in Neural
Information Processing Systems, Vancouver, Canada.
M
¨
uller-Gerking, J., Pfurtscheller, G., and Flyvbjerg, H.
(1999). Designing optimal spatial filters for single-
trial eeg classification in a movement task. Clinical
Neurophysiology, 110(5):787–798.
Pfurtscheller, G. and Lopes da Silva, F. (1999). Event-
related EEG/MEG synchronization and desynchro-
nization: basic principles. Clinical Neurophysiology,
110:1842–1857.
Ramoser, H., Muller-Gerking, J., and Pfurtscheller, G.
(2000). Optimal spatial filtering of single trial EEG
during imagined hand movement. IEEE Transactions
on Rehabilitation Engineering, 8(4):441–446.
Riedmiller, M. and Braun, H. (1993). A direct adap-
tive method for faster backpropagation learning: the
RProp algorithm. In IEEE International Conference
on Neural Networks, pages 586–591, San Fransisco.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
382
