
DESIGN OF INCORPORATED MACRO-MICRO ROBOTS
FOR MACRO AND MICRO OPERATIONS
Vladimir Kotev, Kostadin Kostadinov and Penka Genova
Institute of Mechanics, Bulgarian Academy of Sciences, Acad. G. Bonchev str. 4, Sofia, Bulgaria
Keywords: Synthesis of incorporated macro-micro robots with closed kinematic chains, Kinematic geometry.
Abstract: Robots with cooperated regional macro-structures and local micro-structures are implemented in cell
injection systems, production and control of micro-chips as well as other micro and nano technological
operations. A structure for hybrid macro-micro robot with closed kinematic chains with piezo-actuator links
is proposed. An approach for the synthesis of linkage manipulating mechanisms with two DoF is developed
applying the method of Infinitesimally Close Positions. This approach allows for the synthesis of
mechanisms that perform rectilinear trajectory within a specified section. The rectilinear trajectory may be
obtained by controlling the actuators, but in the presence of accelerations which would decrease the
precision of the trajectory.
1 INTRODUCTION
Nowadays, it is hard to enumerate the companies
and types of produced robots. The kinematic chains
(KC) of most universal robots are opened. There are
robots with closed KC or with hybrid open–closed
KC. Generally, robots with closed or hybrid KC are
used in microbiology, clinical laboratories and
surgery (Kobayashi, 1999). On the other hand,
design and development of actuators resulted in the
design of a new generation of manipulators and
robots for extremely precise micro-manipulations.
Robots with cooperated regional macro-structures
and local micro-structures are implemented in cell
injecting, production and control of micro-chips as
well as other micro and nano technological
operations.
The main advantages of the mechanical system
with close kinematic chains are: light constructions
of the mobile links because the motors are taken out
of the frame; minimization of dynamic and inertia
effects; dynamic control is not necessary; improved
positioning precision, which is typical for the
geometry of closed KC; and comparatively smaller
deformation deviations. The main disadvantages are:
the number of kinematic joints (bearing assemblies)
increases; spatial mechanisms with closed kinematic
chains require the use of specialized kinematic joints
of a lower class as compared to the traditional
rotation and translation bearings; in most cases the
inverse kinematic problem is more difficult to solve.
There are known micro–nano robots, wherein the
conventional driving systems or motors are changed
with piezo-actuator modules or elastic-polymer
actuators (Bacher, 2003; Codourey, 2005; Goldfarb,
2002). The various types of actuators allow for
displacement varying from several nanometers to
several mm. The ceramic actuators have wide
application.
This study proposes a five-link mechanism with
closed kinematic chain where actuators or piezo-
ceramic links are incorporated in the links. The
mechanism is linked by a translation module or
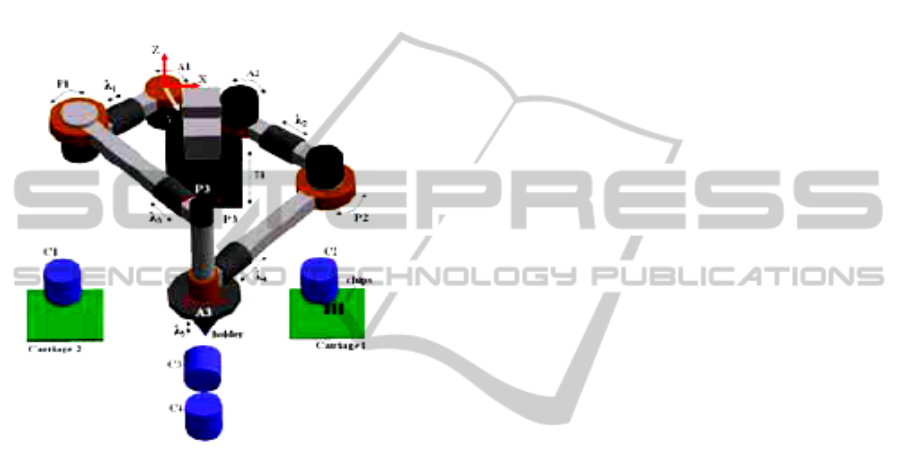
kinematic joint along an axis parallel to Оz (Fig.1).
The suggested five-link mechanism is designed for
robots performing extremely precise linear and other
micro displacements. Linear micro displacement is
mainly required in cell injection systems, micro chip
inspection and other micro and nano technological
operations. The most crucial requirement for these
robots is high precision.
Also, an approach for the synthesis of five-link
macro-micro mechanisms with two degrees of
freedom with infinitesimally close positions (ICP)
has been developed. With slight changes the said
approach can be implemented for the synthesis of
mechanisms with open kinematic chains.
273
Kotev V., Kostadinov K. and Genova P..
DESIGN OF INCORPORATED MACRO-MICRO ROBOTS FOR MACRO AND MICRO OPERATIONS.
DOI: 10.5220/0003373402730276
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 273-276
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 SYNTHESIS OF MECHANISMS
FOR MACRO - MICRO
MECHATRONICS SYSTEMS
APPLYING THE METHODS OF
KINEMATIC GEOMETRY
A mechatronic system (MS) for micro and nano
technological operations based on a five-link
mechanism structure with closed kinematic chain is
synthesized (Fig.1).
Figure 1: A model of hybrid macro-micro manipulation
system for microchip control.
The links 2 and 5 are set to motion by universal
motors, mounted on the fixed link 1 and perform
macro motion. Actuators or micro-motors are
incorporated in the linkage of this KC, whereby their
lengths can be changed within a specified range. A
serious problem in this solution is to maintain high
precision in micro operation. We suggest a
resolution by redundancy of MS for micro motions.
We study the working zone of the five-link macro-
micro MS at different positions and with switched
on actuators. Different trajectories of the end-
effector are obtained depending on the operating
actuators and motors. The transmition ratio (TRs) of
the MS actuators is determined analytically, as well
as strategies of control of hybrid MS are developed.
Also, the direct and inverse problems of kinematics
for such macro–micro MS are solved (Tiankov,
2009, Genova, 2010, Kotev, 2010).
2.1 Methods of Finding the Kinematic
Invariants
Micro operations are performed with small range
motions. In this respect the synthesis of
manipulation mechanisms (ММ) by means of the
methods of infinitesimally close positions (ICP) is
particularly appropriate. With the mechanisms with
two DoF two principally different problems can be
formulated of the synthesis with ICP: a direct
problem and an inverse problem, the direct problem
being for a given mechanism configuration and a
given transfer ratio of the velocities at the two inputs
in order to find the point of Boll. Those Boll points
are used which are known to have rectilinear
trajectories for a limited motion interval, and which
do not require any special control to be
implemented.
Formulation of the Problem
The purpose is to elaborate an approach for the
synthesis of MM with two DoF with open or closed
kinematic chains for precise rectilinear finishing
operations. To solve the direct problem of synthesis,
all kinematic invariants (KI) should be found, which
are necessary for the synthesis of the output link
(OL), as well as a characteristic point, which in a
certain position will coincide with the point of Boll.
The necessary KI are: the instantaneous centers of
rotation (ICR), axes of co-linearization (AC), polar
tangent and normal, inflection circle (IC), constants
of the circle-point curve (CPC) and centring point
curve (CenPC), polar coordinates of Boll points. As
a final result the rectilinear section of OL trajectory
must be defined. For the inverse problem KI are also
necessary, but the sequence of solution is different.
By using said synthesized MS, not only the
position accuracy is improved, but also the
complexity of algorithms for control is greatly
reduced, since the trajectory is achieved only by the
motion of the mechanical system.
2.2 Methods of Finding the Kinematic
Invariants
The five-link closed kinematic chain with two DoF
appears to be a more general case compared to the
open one with two DoF, since it may be viewed as
composed of two open KCs (ОАВ and DСВ –
Fig.2). The base point is a kinematic joint В.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
274
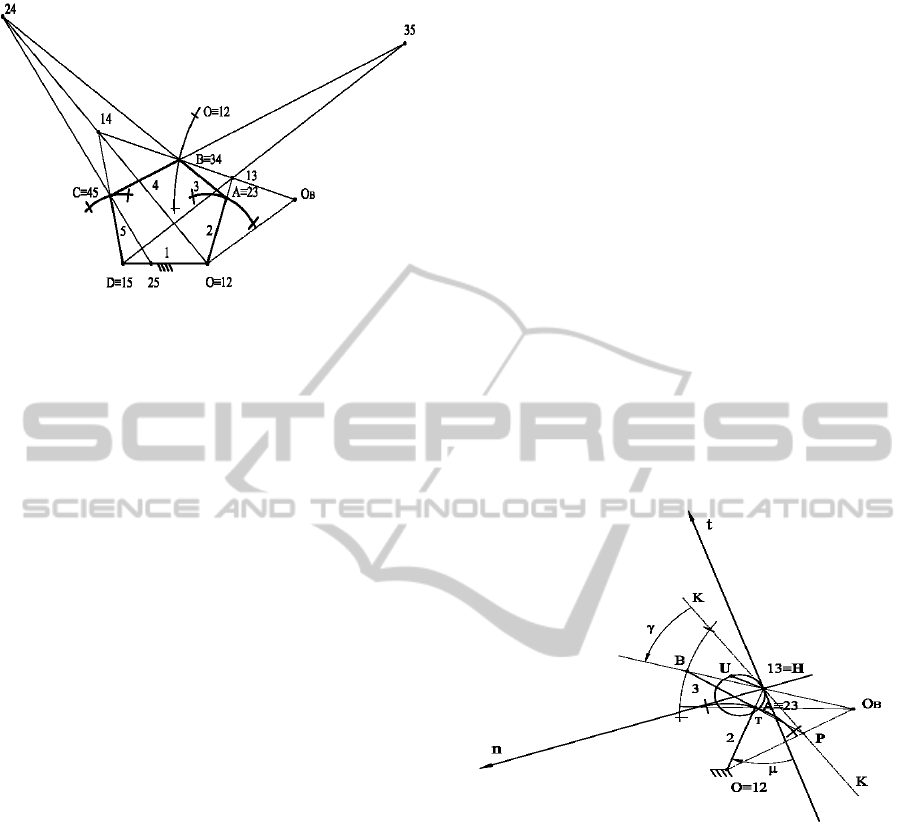
Figure 2: Five-link closed kinematic chain – ICR.
2.2.1 The Instantaneous Centers of
Rotation – ICR
ICR of all links of a given KC are found using the
Aranhold-Kennedy theorem. For KC with two DoF
the theorem may be applied only if at least one of
the five ICR which have to be found is defined.
Thus, for example, with the direct problem of
kinematics (DPK) the transmission ration is
specified, i.e. ICR-25, and with the inverse problem
of kinematics (IPK) the trajectory of point В is
determined (Fig.2). On the normal to the trajectory
of the end-effector lie two of the searched centres of
rotation (ICR-13 and ICR-14). As these points also
lie on the straight lines ОА (12-23) and СD (45-15),
they are the points of intersection of said lines with
the normal. Fig.2 shows all ten ICR for the five-link
KC. Kinematic invariants of the rocker links 3 and 4,
respectively, are found by means of the general
theorems of kinematic geometry or modifications
thereof.
2.2.2 Axis of Co-linearization
The line AC is the straight line which connects the
points of intersection of the normals to the
trajectories of two points of a body moving in a
plane and it is also the line which connects the two
points and their centers of curvature (CC). On Fig.2
it is seen that two points, namely А and В are given
on link 3 moving in a plane and only one point of
CC, i.e. centre О of point А. The centre ОВ of point
В must be found. It is known that the radius of
curvature, and coordinates of CC, respectively,
depend on the second derivatives of the coordinates
of point В. According to the definition, co-
linearization is the straight line passing through ICR
Н≡13 and Р (Fig.3), which is marked with „к-к” and
an axis line is drawn.
2.2.3 Polar Tangent and Normal
In accordance with the theorem of Bobilier, the
angle γ measured from AC to one of the normals
crossing in Н is equal to the angle µ measured in the
opposite direction from the tangent to the other
normal. Hence, the polar tangent t is found and the
normal n, respectively.
2.2.4 Inflection Circle
The Euler-Savary equation can be applied. The point
Т is on IC. In this case RC of the trajectory of point
А is АО = 12. The point of Boll is the point of
intersection of IC and CPC. To find this point it is
necessary to find the constants of the polar equations
of CPC and CenPC. According to the theory of KG,
the problem is reduced to finding the Boll point of
IV or V series. When the Boll point is of the IV
series, it is a point of intersection of the circle of
inflexions and the circle point curve (Chung 1989,
Genova 1995, 2009, 2010).
Figure 3: Kinematic invariants and point of Boll.
2.3 The Inverse Problem of the
Synthesis is Formulated Applying
the KG Methods of ICP
The inverse problem of KG, as we formulated it,
consists of either defining the characteristic point,
for example that of Boll, or some of the main
dimensions to synthesize the configuration, or both,
depending on which will satisfy the given problem.
The synthesis is solved with a given point of
Boll. In the selected coordinate system, the directrix
of the tangent of the trajectory of Boll point is also
given (actually, in the synthesis of ICP, this directrix
coincides with the trajectory itself up to the third
series), and the conditional position of the initial link
is given. These input data are enough to determine
DESIGN OF INCORPORATED MACRO-MICRO ROBOTS FOR MACRO AND MICRO OPERATIONS
275

the kinematic invariants, including the CPC and
CenPC for the relatively movable link, for which we
already know the kinematic joint connecting it to the
input link as well as the Boll point. If we synthesize
a five-link mechanism, then the choice of the closed
kinematic pair can be subjected to the convenient
ratio of the two input velocities for the realization of
the transfer function of the third series.
Theoretically, the solutions are numerous, i.e.
numerous four-link CKC can be synthesized
(Genova 2010). Also, some special cases are studied
where the first transfer function is a constant, i.e. its
derivatives are zero, as well as solutions are
examined for a rectilinear section of maximum
length around the Boll point.
Further problems of the synthesis of hybrid
macro-micro mechatronic systems (MS):
- Synthesis of MS with three DoF and given
orientation of the trajectory of output link.
- Synthesis of MS with given points of
Burmester.
- Synthesis of MS combined with micro motions
by means of the methods of kinematic geometry of
infinitesimally close positions.
3 CONCLUSIONS
A design approach for the synthesis of five-link
mechanisms with two DoF with infinitesimally close
positions has been developed. With slight changes
this approach can also be implemented for the
synthesis of mechanisms with open kinematic
chains. The obtained results clearly demonstrate that
with the methods of kinematic geometry rectilinear
micro motions can be achieved with very high
precision and they can be successfully combined
with the motion of macro mechatronic systems
(MS). Such macro-micro MS are useful in the
performance of operations such as precise delivery
of probes in microelectronics and optics, pipetting,
cell injection and other microbiological operations.
Of course, the rectilinear trajectory may be obtained
by controlling the actuators, but inertial forces may
appear which will decrease the precision of the
trajectory.
With the two DoF mechanisms two principally
different problems can be formulated of the
synthesis with ICP: a direct problem and an inverse
problem. The direct problem is solved for a given
mechanism configuration and a given transfer ratio
of the velocities at the two inputs in order to find the
point of Boll. Furthermore, the results of these
examples show that optimal solutions can be sought
depending on the technological operation.
ACKNOWLEDGEMENTS
This work was funded by Bulgarian National
Science Fund through the project SpeSi-MINT Nr.
DO 0171/2008.
Dr. Kotev also acknowledges the support of the
ESF grant through the project BG051PO001-
3.3.0/40.
REFERENCES
Bacher, J., 2003. Conception de robots de tres haute
precision a articulations flexibles: integration
dynamicque-commande, these 2907, presenteee a ala
faculte sciences et techniques de l’ingenieur, institut
de production er robotique, section de
microtechnique, ecole polytechnique federale de
Lausanne, 1–150.
Codourey, A., W. Zesch, R. Buechi, R. Siegwart, 1994.
High Precision Robots for Automated Handling of
Micro Objects, Seminar on Handling and Assembly of
Microparts, Vienna, pp. 1–8, November 14th.
Chung, E. Pennestri, On a technique for higher order
synthesis of four-bar function generators, MMT, 1989.
Genova, P., R. Kitancheva, 1995. Curvature of Boll and
Boll’s point from a higher order, ММТ, №11.
Genova, K. Kostadinov, Vl. Kotev, 2009. Kinematic
invariants with infinitesimally close positions of
mechanisms with two degrees of freedom. Theoretical
and Applied mechanics, 2-5 Sept. 2009, Borovets,
Bulgaria.
Genova P., Kotev V., 2010. Structural Analysis of a Five-
Link Redundant Macro–Micro Mechatronic System,
ICBBM 2010, Liepaya, Latvia, May 24-28, 2010,
vol.7, 47-50.
Goldfarb, M. et al., 2002. An Introduction to Micro-and
Nanotechnology. Mechatronic Handbook.
Kobayashi, E., Masamune, K., 1999. A New Safe
Laparoscopic Manipulator System with a Five-Bar
Linkage Mechanism and an Optical Zoom, Computer
Aided Surgery, 4, pp.182-192.
Kotev V., Genova P., 2010. Computer Analysis for
Selection of Strategy of Control of Redundant Macro-
Micro Manipulation System. ICBBM 2010, Liepaya,
Latvia, May 24-28, 2010, vol.7, 51-54.
Tiankov, T. P. Genova, Vl. Kotev, K. Kostadinov, 2009.
Strategy for control of a hybrid macro – micro robot
with a 5 – link closed structure – an inverse problem
of kinematics. Proceedings of the international
conference on manufacturing systems – ICMaS, 2009,
Bucharest, Romania, 113 – 117.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
276
