
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy
Applic
ation to Spaceborne Data Communication Systems
∗
Jos´e Rufino, Paulo Verissimo
Universidade de Lisboa, Faculdade de Ciˆencias, LaSIGE, Campo Grande, 1749-016 Lisboa, Portugal
Ricardo Pinto, Carlos Almeida, Guilherme Arroz
Universidade T´ecnica de Lisboa, Instituto Superior T´ecnico, Avenida Rovisco Pais, 1049-001 Lisboa, Portugal
Keywords:
Dependability and real-time, Controller area network, Spacecraft data communication.
Abstract:
The Controller Area Network (CAN) has played along the last decade a crucial role in the design and imple-
mentation of distributed embedded systems. However, the native CAN protocol exhibits a set of availability,
reliability and timeliness limitations. Given the large practical base of off-the-shelf microcontrollers inte-
grating standard CAN interfaces and the emergence of CAN protocol open cores, a fundamental question is
whether (and how) those components can be used for highly dependable applications of CAN?
This paper identifies a fundamental set of shortcomings of the native CAN protocol and discusses how existing
CAN controllers can be combined with additional hardware/software components to secure the provisioning
of strict dependability and timeliness guarantees. Furthermore, the paper discusses the main issues in the
design and implementation of CANELy, a CAN-based infrastructure able of extremely reliable hard real-time
communication, and shows how CANELy components can be integrated in the onboard data communication
and processing infrastructure currently being designed for future space vehicle avionics.
1 INTRODUCTION
The Controller Area Network (CAN) has played
along the last decade a crucial role in the design and
implementation of distributed embedded systems in
areas as diverse as industrial automation, automotive,
train transportation, medical, oil drilling, aeronautics
and space. Standard CAN-based profiles have been
defined for a diversified set of specific devices and
application domains. Recently, the domains of aero-
nautics (AEEC, 2010) and space (ECSS, 2005) have
been approached.
In the course of our current research aiming at
building a time- and space-partitioned architecture for
the next generation of space vehicle avionics we are
tackling the difficult problem of integrating input/out-
∗
T
his work was partially developed within the scope
of the European Space Agency Innovation Triangle Initia-
tive program, through ESTEC Contract 21217/07/NL/CB,
Project AIR-II (ARINC 653 in Space RTOS – Industrial
Initiative, http://air.di.fc.ul.pt). This work was partially sup-
ported by Fundac¸˜ao para a Ciˆencia e a Tecnologia (Por-
tuguese Foundation for Science and Technology), through
the Multiannual Funding and CMU-Portugal Programs.
put (I/O) functions, such as sensors, actuators and net-
works while maintaining overall system responsive-
ness (Rufino et al., 2010). The architectural princi-
ple of time- and space-partitioning (TSP) enables the
safe integration of applications with different degrees
of criticality in a single computing platform. Applica-
tions are segregated into logical containers, the parti-
tions, for the benefit of fault containment and to ease
verification, validation and certification. Each parti-
tion uses a predefined dedicated memory addressing
space; access to a given I/O device is granted to the
system partition hosting the corresponding agent for
I/O operations. Partitions and therefore I/O opera-
tions are scheduled under a predetermined, cyclically
repeated, sequence of time windows.
Given the reasonable body of research in CAN
dependable communications and the on-going stan-
dardisation activities in the space domain, we are ap-
proaching the use of the CAN data bus with the pur-
pose of integrating responsive remote terminal units
(RTU) and simple sensors/actuators in a TSP system
aboard a spacecraft (Figure 1).
CAN is traditionally viewed as a robust data
bus. However, the native CAN protocol exhibits a
456
Rufino J., Verissimo P., Pinto R., Almeida C. and Arroz G..
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy - Application to Spaceborne Data Communication Systems.
DOI: 10.5220/0003376004560463
In Proceedings of the 1st International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2011), pages
456-463
ISBN: 978-989-8425-48-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Utilization of CAN in a spacecraft TSP system.
set of severe limitations with regard to provisioning
of strict availability, reliability and timeliness guar-
antees, which are a must for spaceborne applica-
tions. Given the large practical base of off-the-shelf
standard CAN interfaces, a fundamental question is
whether (and how) these components can be used for
highly dependable applications of the CAN data bus?
In fact, what is missing in the standard CAN data
bus to attain high levels of dependability is a set of
fault tolerance and timeliness-related services. These
can be provided off-the-shelf (i.e. without modifica-
tions to the CAN standard or to existing CAN con-
trollers), through the use of properly encapsulated ad-
ditional hardware/software components. The mate-
rialization of this concept is called CAN Enhanced
Layer (CANELy), which is made from several hard-
ware and software building blocks (Rufino, 2002).
This paper discusses the main issues in the design
and implementation of CANELy and how such func-
tionality can be effectively integrated with a TSP ar-
chitecture. The paper is organized as follows: Sec-
tion 2 provides a short description of CAN and anal-
yses its dependability; Section 3 discusses the system
model; Section 4 analyses how to improve the avail-
ability of the network infrastructure; Section 5 dis-
cusses how to secure CAN timely behaviour in the
presence of faults; Section 6 addresses the integration
of a semantically rich CANELy service interface in
a TSP architecture and the separation of implemen-
tation issues between hardware and software compo-
nents. Finally, Section 7 concludes the paper.
2 CAN DATA BUS
CAN is a multi-master data bus that uses a twisted
pair cable as transmission medium (CAN, 1993; CiA,
1994). The network maximum length depends on
the data rate. Typical values are: 40m @ 1 Mbps;
1000m @ 50 kbps. Data bus signalling takes one
out of two values: recessive (r), also the state of an
idle bus; dominant (d), which always overwrites a re-
cessive value. This behaviour, together with the use
of unique frame identifiers, is exploited for bus arbi-
tration. A carrier sense multi-access with determin-
istic collision resolution policy is used. When sev-
eral nodes compete for bus access, the node transmit-
ting the frame with the lowest identifier always goes
through and gets the bus. Frames that have lost arbi-
tration or have been destroyed by errors are automat-
ically scheduled for retransmission. A data frame is
a piece of encapsulated information, which may con-
tain a message, a user-level piece of information. A
remote frame has no field for message encapsulation.
In the signalling of abnormal network operation
incidents, the CAN protocol uses: error frames, for
(global) error signalling; overload frames, to react to
violations of the standard interframe spacing, which
has a nominalduration of three bit-times and is known
in CAN terminology as intermission (CAN, 1993).
Although the standard CAN physical layer allows
a few cabling faults (one wire open/short failures) to
be tolerated (CAN, 1993; CAN, 1997), no standard-
ized mechanism exists to provide resilience against
network partitioning if both wires of the network ca-
ble get simultaneously interrupted. A solution to
the problem of (physical) network partitioning has
to be built as an extension to the standard specifica-
tion (NOB, 1998; Rufino et al., 1999).
Furthermore, the occurrence of certain incidents
in CAN operation (such as: bit errors; transmitter/re-
ceiver glitches) produces a subtle form of (virtual)
network partitioning, called inaccessibility. Though
the standard CAN protocol has means of recovering
from these situations, the recovery process takes time,
leading to increase the network access delay as seen
by one or more nodes. This may induce a violation of
the expected network timeliness properties and there-
fore provisions to tolerate such kind of faults are re-
quired (Verissimo et al., 1997; Rufino et al., 2006).
3 SYSTEM MODEL
The definition of a systemic model for CAN proved
extremely useful, showing the weaknesses of CAN
with regard to dependability and providing the
grounds to handle those problems effectively. The
fault assumptions for the system and a relevant set
of CAN protocol properties are drawn from previous
works on CAN (Rufino et al., 1998; Rufino et al.,
1999; Rufino, 2002).
3.1 Fault Model
The CAN infrastructure is composed of N nodes in-
terconnected by a Channel. The Channel is the physi-
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy - Application to Spaceborne Data Communication
Systems
457

cal path, i.e. the cable medium and transceivers, used
by Medium Access Control (MAC) entities to com-
municate.
A component is weak-fail-silent if it behaves cor-
rectly or crashes if it exhibits more than a given num-
ber of omission failures – the component’s omission
degree – in a time interval of reference, T
rd
. In CAN,
an omission is an error that destroys a data or remote
frame. The following failure semantics are defined
for CAN network components:
• individual components are weak-fail-silent with omis-
sion degree f
o
;
• failure bursts never affect more than f
o
transmissions in
a time interval of reference;
• omission failures may be inconsistent (i.e., not observed
by all recipients);
• there is no permanent failure of the Channel (e.g. the
simultaneous partitioning of all redundant media).
3.2 CAN Protocol Properties
For the sake of completeness, a discussion of a rele-
vant set of CAN properties is summarized next. The
foundation of CAN operation is described by the
physical layer properties formalized in Figure 2.
Property PCAN1 formalizes the quasi-stationary
propagation of signals in the CAN Channel (Stuart,
1999; Rufino et al., 1999). A Bit is the physical layer
information unit and has a constant nominal duration.
A single Bit is broadcast in the Channel at a time, as
described by PCAN3. In absence of faults, a Bit p
at s assumes one and only one logical value v
s
B
(p).
The symbol
∏
is used in PCAN2 to specify a logical
AND function combining the signals from multiple
simultaneous transmitters into a single Bit value.
A key set of CAN MAC sub-layer properties is
also enumerated in Figure 2. Property MCAN1 de-
rives from CAN built-in error handling mechanisms,
implying that frame errors are transformed into omis-
sions. The residual probability of undetected frame
errors is negligible (Charzinski, 1994). Property
MCAN2 maps the system model failure semantics
onto CAN operational assumptions, being k≥ f
o
.
The behaviour of CAN in the time domain is de-
scribed by property MCAN4. In absence of faults, T
td
includes the normal queuing, access and frame trans-
mission delays. It depends on message latency classes
and offered load bounds (Davis et al., 2007; Zuberi
and Shin, 1997; Livani et al., 1998). In general, T
td
also needs to include the extra delays resulting from
the additional queuing effects caused by the periods
of inaccessibility (Pinho et al., 2000; Punnekkat et al.,
2000). The maximum frame transmission delay in-
cludes a corrective term, T
ina
, which accounts for the
Physical-level properties
PCAN1 - Bit Simultaneity: for any Bit p of any transmit-
ter s starting at t
s
B
(p), if t
r
B
(p) is the start of Bit p as seen by
receiver r, for any r, then in absence of faults, t
s
B
(p) = t
r
B
(p).
PCAN2 - Wired-AND Multiple Access: for all transmit-
ters s in N , the value of any B
it p seen by the channel c is,
in absence of faults, v
c
B
(p) =
∏
s∈N
v
s
B
(p).
PCAN3 - Bit Broadcast: in absence of faults, for any Bit
p on the channel c, and for any receiver r, v
r
B
(p) = v
c
B
(p).
MAC-level properties
MCAN1 - Error Detection: correct nodes detect any cor-
ruption done by the network in a locally received frame.
MCAN2 - Bounded Omission Degree: in a known time
interval T
rd
, omission failures may occur in at most k trans-
missions.
MCAN3 - Bounded Inaccessibility: in a known time in-
terval T
rd
, the network may be inaccessible at most i times,
with a total duration of at most T
ina
.
MCAN4 - Bounded Transmission Delay: any frame
queued for transmission is transmitted on the network
within a bounded delay of T
td
+ T
ina
.
Figure 2: Relevant CAN protocol properties.
worst case duration of inaccessibility events
(MCAN3). The inaccessibility characteristics of
CAN are obtained by analysis of the CAN protocol
(Verissimo et al., 1997; Rufino, 2002).
4 NETWORK AVAILABILITY
The first problem to be addressed concerns the avail-
ability of the CAN infrastructure. A commercial so-
lution (NOB, 1998) uses a self-healing ring/bus but it
does not solve the problem efficiently: ring reconfig-
uration may last as long as 100 ms, an extremely high
inaccessibility figure (Rufino, 2002).
In CANELy, resilience to network physical parti-
tioning is achieved through replication of the physical
path (bus medium and transceivers) used by MAC en-
tities to communicate. Replication of channel media
assumes that: each cable replica is routed differently,
being reasonable to consider failures in different me-
dia as independent; any bit issued from a MAC sub-
layer is simultaneously transmitted on all the redun-
dant media interfaces.
Basic Media Redundancy Mechanisms
An innovative strategy to handle replicated media is
based on a Columbus’ egg idea and extends the wired-
AND nature of CAN (property PCAN2, in Figure 2)
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
458

to the media interface level (Rufino et al., 1999):
the signals from the different M redundant media
receivers, M
Rx
(m), are combined in a conventional
AND function, before interfacing the standard MAC
sub-layer,Ch
Rx
.
The specification of such strategy in VHDL
2
is drawn in Figure 3. This simple solution, fea-
sible given property PCAN1, ensures resilience to
medium physical partitions and stuck-at-recessive
failures (Rufino et al., 1999).
−− MediaRX : Vector a ggregating the se v e r a l media .
−− ChRx : Channel incoming ( Rx) bi t stream , i s
−−−− l o gi c a l ’1 ’ i f a l l media are ’1 ’ , e l s e ’0 ’.
−−−− In CAN, l o g i ca l ’1 ’ <=> r e c e s s i v e ( r )
−−−− l o g i c a l ’0 ’ <=> dominant ( d )
ChRx <= ’1 ’ when MediaRX = (MediaRX ’ range => ’1 ’)
e l s e ’0 ’;
Figure 3: The AND-based media redundancy management
strategy in VHDL.
Resilience to bus stuck-at-dominant failures is
achieved exploiting the identity value of the logical
AND function. The contribution of each medium in-
terface for that function can be selectively disabled,
through the assertion of the M
dis
(m) signal, as speci-
fied in Figure 4.
−− MediaRX : Ve c tor aggr e gati ng the s e v e r al media .
−− M Rx (m) : Medium m Rx s i g n a l ( t r an sc e i v e r ) .
−− M dis (m) : Medium m d i s a b l e s i g n a l .
procMediumRXOR: process i s
begin
−− P ar al l e l i z i n g s e l e c t i v e a c t i o n s on each medium
for m in 1 to NumberMedia loop
MediaRX(m) <= M Rx(m) or M dis (m) ;
end loop ; −− m
end process procMediumRXOR;
Figure 4: Media selection functions in VHDL.
The M
dis
(m) signal is asserted in conformity with
the specified in Figure 5, upon the detection of a
stuck-at-dominant failure, signalled through the as-
sertion of M
stkd
(m), or after a Medium has exceeded
its omission degree bound. The M
dis
(m) signal is
locked in the assert state until the negation of the
M
lock
(m) signal, by CANELy media quarantine en-
tities or upon a request issued from high-level man-
agement entities. The function specified in Figure 5
2
Very High-Speed Integrated Circuits (VHSIC) Hard-
ware Description Language.
contributes to ensure a safe operation, preventing a
faulty Medium of being unseasonably enabled.
−− M dis (m) : Medium m d i s a b l e s i g n a l .
−− M stkd (m) : Medium m i s stuck −at−dominant .
−− M
Od(m) : Medium m omis s ion degree .
−− k m : Medium m omis s ion degree bound .
−− M lock (m) : Medium m l o c k .
MediaDisable : for m in 1 to NumberMedia generate
−−−− P a r a l l e l i z i n g d i s a b l e a c t i o n s on each medium
−− Generate the d i s a b l e s i g n a l for Medium m
M dis (m) <=
M stkd (m) or (M Od(m)>k m ) or M lock (m) ;
end generate MediaDisable ;
Figure 5: Generation of the media disable functions in
VHDL.
The AND-based Media Redundancy Management
is a central component in the CANELy architecture of
Figure 6. The remaining modules identified in the di-
agram of Figure 6 provide additional monitoring and
fault treatment functions.
CAN Controller
Channel Interface
Ch
Tx
Media Redundant CAN Communication Channel
Figure 6: CANELy Media Redundancy Mechanisms.
Media and Channel Monitoring Functions
The set of Media and Channel monitoring functions
identified in Figures 7 and 8 are needed to comple-
ment the bare functionality provided by the AND-
based Media Redundancy Management strategy.
A combination of Media and Channel monitoring
signals is used to provide the following functionality:
• disable operation of Medium m, if a stuck-at-dominant
failure is detected, as reported through M
stkd
(m);
• perform receiver-based frame monitoring, comparing
Channel and Medium incoming frame data on a bit-
by-bit basis. This mechanism is fundamental to detect
Medium omissions;
• detect and account for omissions at each Medium inter-
face and evaluate the corresponding Medium Omission
degree, M
Od
(m);
• disable operation of Medium m, if it exceeds the al-
lowed omission degree bound, k
m
, i.e. if M
Od
(m) > k
m
.
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy - Application to Spaceborne Data Communication
Systems
459
Basic Media Monitoring
M
stkd
(m) Stuck-at dominant medium
asserted if dominant for more than a given threshold;
negated upon detection of a recessive bit.
M
Od
(m) Medium omission degree
incremented upon detection of an omission failure;
unchanged if common-mode or unkown-source errors;
reset upon correct frame transfer on the Medium.
M
lock
(m) Lock Medium m disable status
asserted upon disable of Medium m, by M
dis
(m) (Figure 5);
negated by media quarantine or by high-level entities.
Extended Media Monitoring
M
idle
(m) Medium idle
asserted if recessive for more than a given threshold;
negated upon assertion of Ch
EOT
(see Figure 8).
M
ds
(m) Medium dominant signaling
asserted upon detection of a dominant bit;
negated upon assertion of Ch
EOT
(see Figure 8).
Figure 7: Media monitoring functions in CANELy.
Basic Channel Monitoring
Ch
SOF
Start Of Frame
asserted at beginning of frame transmission;
one bit-time duration.
Ch
Fok
Frame Correct
data or remote frame received without errors;
negated upon assertion of Ch
EOT
.
Ch
Err
Frame Error
asserted upon violation of CAN bit-stuffing rule;
negated upon assertion of Ch
EOT
.
Ch
EOT
End Of Transmission
asserted after detection of minimum bus idle period;
negated upon assertion of Ch
SOF
.
Extended Channel Monitoring
Ch
stk−Tx
Stuck-at dominant Channel
asserted if dominant for more than a given threshold;
negated upon management request.
Figure 8: Channel monitoring functions in CANELy.
These mechanisms provide effective resilience
against all the cabling failures discussed in Section 2.
They are not hard to implement in VHDL as FPGA
3
-
based components.
The VHDL/FPGA machinery of a functionally ef-
fective CANELy unit should also integrate specific
means for the preservation of dependability coverage,
as follows:
• detection of medium partition and medium stuck-at-
recessive failures and their signalling to high-level
management entities;
• early detection of stuck-at-dominant Channel failures,
allowing a prompt shutdown of the incorrect node;
3
Field Programmable Gate Array.
• operation of a CAN-oriented media quarantine
scheme, allowing an optimal k = 1 Channel omission
degree bound, if at least one channel media replica is
unaffected by errors (permanent or transient).
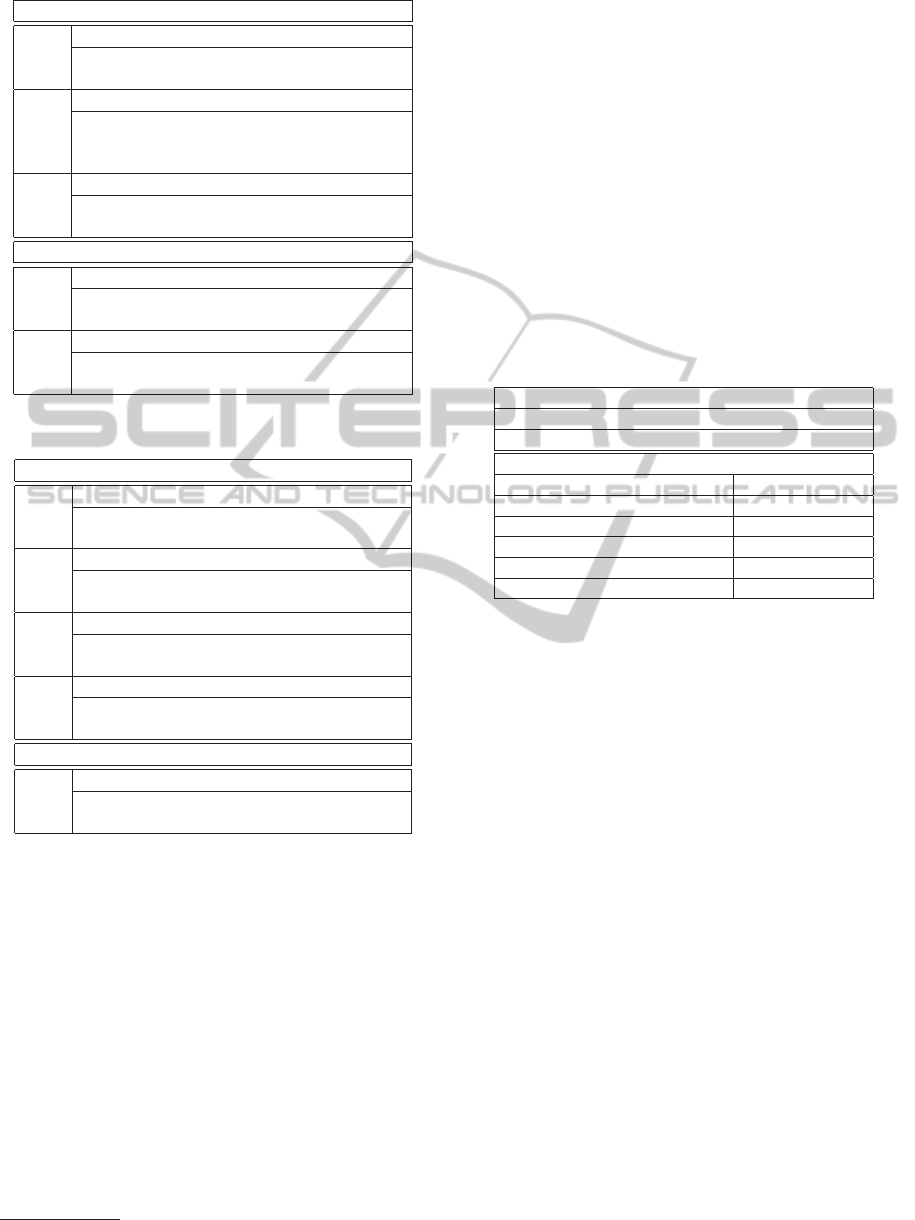
Management Interface
The layer management entities identified in Fig-
ure 6 are elements of the CANELy machinery im-
plemented as FPGA-based components. They pro-
vide an interface between the hardware infrastructure
and the high-level network management protocol en-
tities. Both invocation and notification primitives are
included, as specified in Figure 9, given the param-
eters: (i) baud, the bus bit signalling rate; (ii) k
m
,
the media omission degree bound; (iii) m, the failed
Medium; (iv) mid, the message identifier.
Invocation Primitives (canely-msu.req)
Description
Initialize (baud, k
m
)
Notification Primitives (canely-msu.nty)
Description Issuing Condition
Omission degree exceeded (m) M
Od
(m) > k
m
Stuck-at-dominant Medium (m) M
stkd
(m)
Stuck-at-recessive Medium (m, mid) M
idle
(m) ∧ ¬M
ds
(m)
Medium partition (m, mid) M
idle
(m) ∧ M
ds
(m)
Stuck-at-dominant Channel Ch
stk−Tx
Figure 9: CANELy redundancy management primitives.
The parameters signalled upon stuck-at-recessive
and Medium partition failures permits a high-level di-
agnose application to establish a node connectivity
matrix, useful to pinpoint the location of the failure
in the network cabling.
Although such mechanisms may be useless in
unmanned spacecraft, they may be important for
manned space flights or in permanent planetary bases
where the crew may perform some repair actions.
5 INACCESSIBILITY CONTROL
Normal CAN operation can be hindered by periods
of inaccessibility, which derive from incidents in net-
work operation (e.g. bit errors) that temporarily pre-
vent communication. Service is not provided to some
or all of the nodes and this may have the effect of
increasing the corresponding queueing and network
access delays. Analysis of message transmission la-
tencies performed under the assumption the network
always operates normally (Davis et al., 2007; Zuberi
and Shin, 1997; Livani et al., 1998) are relevant and,
undoubtedly, useful for optimal system configuration.
However, bounds are established that may be violated
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
460

upon the (even if rare) occurrence of inaccessibility
events.
To avoid timing failures due to network inacces-
sibility incidents it is required to control inaccessibil-
ity (Rufino, 2002; Rufino et al., 2006).
5.1 CAN Inaccessibility Boundedness
The first step to control inaccessibility implies the
study of network accessibility constraints, ensuring
that the number of inaccessibility periods and their
duration have a bound. The analysis in (Verissimo
et al., 1997; Rufino, 2002) provides a comprehensive
set of easy-to-use formulas to evaluate the worst-case
bounds of the periods of inaccessibility.
The results of such analysis are summarized in
Figure 10. It is worth noticing: the single bit er-
rors (on the leftmost part of Figure 10) are not re-
duced because they affect only the transmission of
one frame; the worst-case inaccessibility bound for
bus multi-burst errors is reduced, due to the effects
of CANELy media quarantine mechanisms; the ex-
tremely low worst-case figure of bus reconfiguration
delay (209 µs @ 1Mbps), compared with other fail-
ure scenarios and, in particular, with the 100 ms of
existing commercial systems (NOB, 1998).
0
500
1000
1500
2000
2500
3000
Bit
Stuff
CRC
ACK
Form
React.
Ovload
Single
Burst
M. Burst
(k=3)
Deaf
Rx Stuck
Tx Stuck
Rx Fail
Tx Fail
Bus
Reconf.
CAN 2.0B Inaccessibility (bit-times)
Error Scenarios
Standard CAN
CANELy
Figure 10: Normalized durations of inaccessibility periods.
On the other hand, the actions taken in (Rufino,
2002) to enforce the weak-fail-silent assumption for
the network components: are based on CAN own er-
ror confinement mechanisms (Rufino et al., 1998); in-
duced only a moderate, though interesting, reduction
of inaccessibility durations for receiver and transmit-
ter failure scenarios, as shown in Figure 10.
The avoidance of “babbling idiot” failures has fur-
ther been studied: the inaccessibility constraint de-
rived in (Broster and Burns, 2003) for CAN settings
has a normalized duration of 41 bit-times, much lower
than the values inscribed in Figure 10. Babbling id-
iot failures are not detectable by the native CAN error
handling and fault confinement mechanisms. Protec-
tion has to be provided by special-purpose machinery
(bus guardian) (Broster and Burns, 2003).
5.2 Message Schedulability Analysis
Next, it is required to show that inaccessibility bounds
are suitably low for service requirements. This re-
quires a comprehensive analysis of message schedu-
lability guarantees given known traffic patterns and
offered load bounds. Both error free and worst-case
error analysis are relevant. The former, is intended
to provide the parameters required for optimal sys-
tem configuration (Davis et al., 2007; Zuberi and
Shin, 1997; Livani et al., 1998). The latter, given
a worst-case pattern of inaccessibility incidents, pro-
vides hard real-time guarantees of message schedu-
lability and defines worst-case message delivery de-
lays (Pinho et al., 2000; Punnekkat et al., 2000).
Extended versions of existing message schedula-
bility analysis tools and methodologies (Pinho et al.,
2000) should be able to provide relevant parameters
for system configuration, including a bound for the
time the effects of inaccessibility last in the system.
5.3 CAN Inaccessibility Control
To enable low-level control of inaccessibility, the
Channel monitoring functions of Figure 8 should be
extended with the additional functionality summa-
rized in Figure 11. The Ch
Ina
signal, is used for:
• the evaluation of the real durations of inaccessibility
incidents, t
ina
, and of the extra message queuing and
network access delays, t
p ina
;
• the evaluation of inaccessibility upper bounds with re-
spect to the total number of incidents, i, and their to-
tal duration, T
ina
, in a period of reference (property
MCAN3);
• the evaluation of the worst-case duration of the en-
tire period where the effects of inaccessibility last in
the system, which we have defined as inaccessibility
epoch, T
p
ina
.
Extended Channel Monitoring
Ch
Bidle
Bus Idleness
asserted if bus is idle for more than the nominal intermission;
negated upon detection of a dominant bit.
Ch
Ina
Channel Inaccessibility status
asserted upon assertion of Ch
Err
(Figure 8);
negated upon assertion of Ch
Bidle
.
Figure 11: Extension of Channel monitoring functions for
the control of inaccessibility.
The layer management interface of Figure 9 is
extended with the primitives described in Figure 12,
which are used to manage the effects of inaccessibil-
ity in protocol execution, at all the relevant levels of
the system (Rufino, 2002; Rufino et al., 2006).
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy - Application to Spaceborne Data Communication
Systems
461

Invocation Primitives (canely-icu.req)
Description Bounds
Get Channel status (Ch
Ina
)
Get Channel inaccessibility events (Ch
i
) i
Get Channel inaccessibility times (t
ina
, t
p ina
) T
ina
, T
p ina
Notification Primitives (canely-icu.nty)
Description
Channel status change (Ch
Ina
)
Figure 12: CANELy inaccessibility control primitives.
At application-level, a corrective term account-
ing for the worst-case duration of an inaccessibility
epoch is simply added to optimal timeout values. At
low-level protocols, advanced inaccessibility control
mechanisms allow: to account for the real duration
of an inaccessibility epoch; to selectively add a cor-
rective term to (optimal) timeout values, only when
inaccessibility affects protocol timeliness.
6 TSP SYSTEM INTEGRATION
In TSP systems the exchange of data between parti-
tions (either local or remote) is restricted to autho-
rized interpartition communication channels. Two
paradigms are used: sampling ports, holding only one
fixed-size message; queueing ports, holding room for
a given number of variable-size atomic and totally or-
dered messages. The size of each message has a pre-
determined maximum size. Such approach is in con-
formity with the ARINC-653 specification (AEEC,
2006).
The CANELy architecture and its companion real-
time protocol suite, supporting group communica-
tion (Rufino et al., 1998), clock synchronization (Ro-
drigues et al., 1998), node failure detection and site
membership (Rufino et al., 2003), constitutes an ex-
cellent candidate for supporting interpartition com-
munication in distributed TSP systems.
The CANELy machinery supporting the execu-
tion of the real-time communication protocol suite,
dubbed CANELy Dependability Engine, can be ex-
tended to support interpartition communication in dis-
tributed TSP systems, as depicted in Figure 13. Such
extension is achieved through provision and manage-
ment of the buffers necessary for implementing the
sampling and queueing communication ports. The ar-
chitecture proposed in Figure 13 decouples network
operations from message data processing by the cor-
responding partition in the distributed TSP system.
6.1 Proof-of-Concept Prototype
In the prototype of the CANELy architecture cur-
Figure 13: CANELy Dependability Engine extension with
support for distributed TSP systems.
rently being implemented (Figure 14), the CANELy
processing infrastructure required for the execution
of CANELy low-level protocols is materialized using
the state-of-the-art Dallas/Maxim DS80C390 High-
Speed Microprocessor (Dallas, 2005).
FPGA
Microcontroller
Dual-MAC
Reliable Comm. Protocol Suite
Layer Management
Dual-MAC
(optional)
Management
Interface
CANELy Functions
Control of Inaccessibility
CAN Monitoring
AND-based Media Redundancy
Channel
Interface
Media
Interfaces
Cable Connectors
Figure 14: CANELy prototype board.
The support for the low-level special-purpose
functions is implemented by a single, medium capac-
ity, programmable logic device (Field Programmable
Gate Array - FPGA) (Xilinx, 2009).
7 CONCLUDING REMARKS
Given the increasing demand for embedded dis-
tributed fault-tolerant systems based on low-cost net-
work technologies, it has been: investigated the short-
comings of CAN, with regard to dependability and
timeliness; defined a systemic model of CAN that not
only did it show those weaknesses, but it provided the
grounds to handle those problems effectively.
This paper discussed the implementation of the
main components in the CANELy architecture, the
CAN Enhanced Layer (Rufino, 2002), a combina-
tion of the CAN standard layer with some simple ma-
chinery resources and low-level protocols achieving
PECCS 2011 - International Conference on Pervasive and Embedded Computing and Communication Systems
462

highly dependable real-time communications. The
CANELy mechanisms enhance the dependability and
timeliness of CAN-based systems and allow the as-
sessment of real system parameters (w.r.t. timing,
omission), thus making possible to monitor the cov-
erage of both dependability and timeliness models.
In the context of spaceborne applications, the
CANELy architecture can be used to support inter-
partition communication in distributed TSP systems.
Finally, this paper identified the set of functions
to be implemented as FPGA-based components and
the functionality that has to be integrated at CANELy
(software) protocols.
REFERENCES
AEEC (2006). Avionics application software standard in-
terface. ARINC Specification 653, Airlines Electronic
Engineering Committee (AEEC).
AEEC (2010). General standardization of CAN (Controller
Area Network) for airborne use. ARINC Spec. 825-1,
Airlines Electronic Engineering Committee (AEEC).
Broster, I. and Burns, A. (2003). An analysable bus-
guardian for event-triggered communication. In Proc.
of 24th Real-time Systems Symposium, pages 410–
419, Cancun, Mexico. IEEE.
CAN (1993). International Standard 11898 - Road vehicles
- Interchange of digital information - Controller Area
Network for high-speed communication. ISO.
CAN (1997). TJA1053 - Fault-tolerant CAN transceiver.
Philips Semiconductors.
Charzinski, J. (1994). Performance of the error detection
mechanisms in CAN. In Proc. of the 1st Int. CAN
Conference, pages 1.20–1.29, Mainz, Germany. CiA.
CiA (1994). CAN Physical Layer for Industrial Applica-
tions - CiA Draft Standard 102 Version 2.0. CiA -
CAN in Automation.
Dallas (2005). DS80C390 Dual-CAN High-Speed Micro-
processor. Maxim/Dallas Semiconductors.
Davis, R. I., Burns, A., Bril, R. J., and Lukkien, J. J. (2007).
Controller Area Network (CAN) schedulability anal-
ysis: Refuted, revisited and revised. Real-Time Sys-
tems, 35:239–272.
ECSS (2005). ECSS Draft Standard ECSS-E-ST-50-15C.
Recommendations for CAN Bus in Spacecraft On-
board Applications. European Cooperation for Space
Standardization (ECSS).
Livani, M., Kaiser, J., and Jia, W. (1998). Scheduling hard
and soft real-time communication in the controller
area network (CAN). In Proc. of the 23rd IFAC/I-
FIP Workshop on Real-Time Programming, Shantou
- China. IFAC/IFIP.
NOB (1998). RED-CAN a fully redundant CAN-system.
NOB Elektronik AB Product Note - Sweden.
Pinho, L., Vasques, F., and Tovar, E. (2000). Integrating
inaccessibility in response time analysis of CAN net-
works. In Proc. of the 3rd Int. Workshop on Factory
Communication Systems, Porto, Portugal. IEEE.
Punnekkat, S., Hansson, H., and Norstrom, C. (2000). Re-
sponse time analysis under errors for CAN. In Proc.
of the Real-Time Technology and Applications Sympo-
sium, pages 258–265, Washington, USA. IEEE.
Rodrigues, L., Guimar˜aes, M., and Rufino, J. (1998). Fault-
tolerant clock syncronization in CAN. In Proc. of
19th Real-Time Systems Symposium, pages 420–429,
Madrid, Spain. IEEE.
Rufino, J. (2002). Computational System for Real-Time Dis-
tributed Control. PhD thesis, Technical University of
Lisbon - Instituto Superior T´ecnico, Lisboa, Portugal.
Rufino, J., Craveiro, J., and Verissimo, P. (2010). Building
a time- and space-partitioned architecture for the next
generation of space vehicle avionics. In Proc. of the
8th IFIP Int. Workshop on Software Technologies for
Embedded and Ubiquitous Systems, pages 179–190.
IFIP, Springer.
Rufino, J., Verissimo, P., and Arroz, G. (1999). A Colum-
bus’ egg idea for CAN media redundancy. In Digest
of Papers, The 29th Int. Symposium on Fault-Tolerant
Computing Systems, pages 286–293, Madison, Wis-
consin - USA. IEEE.
Rufino, J., Verissimo, P., and Arroz, G. (2003). Node failure
detection and membership in CANELy. In Proc. of the
2003 International Conference on Dependable Sys-
tems and Networks, pages 331–340, San Francisco,
California, USA. IEEE.
Rufino, J., Verissimo, P., Arroz, G., and Almeida, C. (2006).
Control of inaccessibility in CANELy. In Proc. of the
6th. Int. Workshop on Factory Communication Sys-
tems, pages 35–44, Torino, Italy. IEEE.
Rufino, J., Verissimo, P., Arroz, G., Almeida, C., and Ro-
drigues, L. (1998). Fault-tolerant broadcasts in CAN.
In Digest of Papers, The 28th Int. Symposium on
Fault-Tolerant Computing Systems, pages 150–159,
Munich, Germany. IEEE.
Stuart, R. (1999). CAN bit timing requirements. Applica-
tion Note AN1798, Motorola, Inc.
Verissimo, P., Rufino, J., and Ming, L. (1997). How hard is
hard real-time communication on field-buses? In Di-
gest of Papers, The 27th Int. Symp. on Fault-Tolerant
Computing Systems, Washington - USA. IEEE.
Xilinx (2009). Spartan-3E FPGA family data sheet.
Zuberi, K. and Shin, K. (1997). Scheduling messages on
Controller Area Network for real-time CIM applica-
tions. IEEE Transactions on Robotics and Automa-
tion, 13(2):310–314.
ENFORCING DEPENDABILITY AND TIMELINESS IN CANELy - Application to Spaceborne Data Communication
Systems
463
