
GRAPH BASED SOLUTION FOR SEGMENTATION TASKS IN CASE
OF OUT-OF-FOCUS, NOISY AND CORRUPTED IMAGES
Anita Keszler, Tam
´
as Szir
´
anyi
Distributed Events Analysis Group, Computer and Automation Research Institute
Hungarian Academy of Sciences, Budapest, Hungary
Zsolt Tuza
Combinatorial Computer Science Research Group, Computer and Automation Research Institute
Hungarian Academy of Sciences, Budapest, Hungary
Keywords:
Image segmentation, Focus map, Graph-based clustering, Dense subgraph mining.
Abstract:
We introduce a new method for image segmentation tasks by using dense subgraph mining algorithms. The
main advantage of the present solution is to treat the out-of-focus, noise and corruption problems in one unified
framework, by introducing a theoretically new image segmentation method based on graph manipulation.
This demonstrated development is however a proof of concept: how dense subgraph mining algorithms can
contribute to general segmentation problems.
1 INTRODUCTION
We introduce a new method for image segmentation
tasks by using dense subgraph mining algorithms.
Image classification based on the automatically ex-
tracted location of the main objects for indexing and
retrieval purposes is a still active research area on the
different levels of machine vision. We contribute to
this problem an automatic method finding image ar-
eas out of focus.
The goal in the segmentation is a binary task: dis-
criminate the focused and out of focus areas. The
method first builds up a graph, where pixels are the
vertices and edges are weighted by the interpixel simi-
larities in a given radius. In image segmentation graph
cut and spectral analysis methods (Kim and Hong,
2009)(Shi and Malik, 2000)(Cousty et al., 2009) are
the most frequently used solutions, however these
methods usually have several drawbacks. The main
disadvantage in this type of application is the fixed
number of segments these methods give as an output,
where this number is often independent of the intput
dataset. However, in case of dense subgraph mining
algoritmhs there are numerous approaches where we
can avoid this problems, although applied for social
interaction mining (Du et al., 2007),(Faloutsos et al.,
2004)(Mishra et al., 2007).
2 FINDING THE AREA OF
FOCUS
This development is however a proof of concept: how
dense subgraph mining algorithms can contribute to
general image segmentation problems. The present
problem, segmenting focused areas was an unsolved
one until (Kovacs and Sziranyi, 2007). That paper
suggested a solution using localized blind deconvo-
lution, without any a priori knowledge about the im-
age or the shooting conditions and using a new er-
ror measure for area classification. Previous meth-
ods (Lim et al., 2005) used edges or autocorrelation
methods to find sharp areas, but their efficiency was
weaker for the real focus detection than that of (Ko-
vacs and Sziranyi, 2007). The focus-map detection
methods are usually based on the assumption that pix-
els are smoothed in out-of-focus areas resulting in
lower contrast there. While edge based methods con-
sider the local derivatives to measure smoothness, the
blind deconvolution based method (Kovacs and Szi-
ranyi, 2007) makes estimation on the local image con-
tent itself. The previous methods do not handle the
case when the in-focus condition is evaluated against
noisy and corrupted (e.g. scratched or badly transmit-
ted) images.
100
Keszler A., Szirányi T. and Tuza Z..
GRAPH BASED SOLUTION FOR SEGMENTATION TASKS IN CASE OF OUT-OF-FOCUS, NOISY AND CORRUPTED IMAGES.
DOI: 10.5220/0003379401000105
In Proceedings of the International Conference on Imaging Theory and Applications and International Conference on Information Visualization Theory
and Applications (IMAGAPP-2011), pages 100-105
ISBN: 978-989-8425-46-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
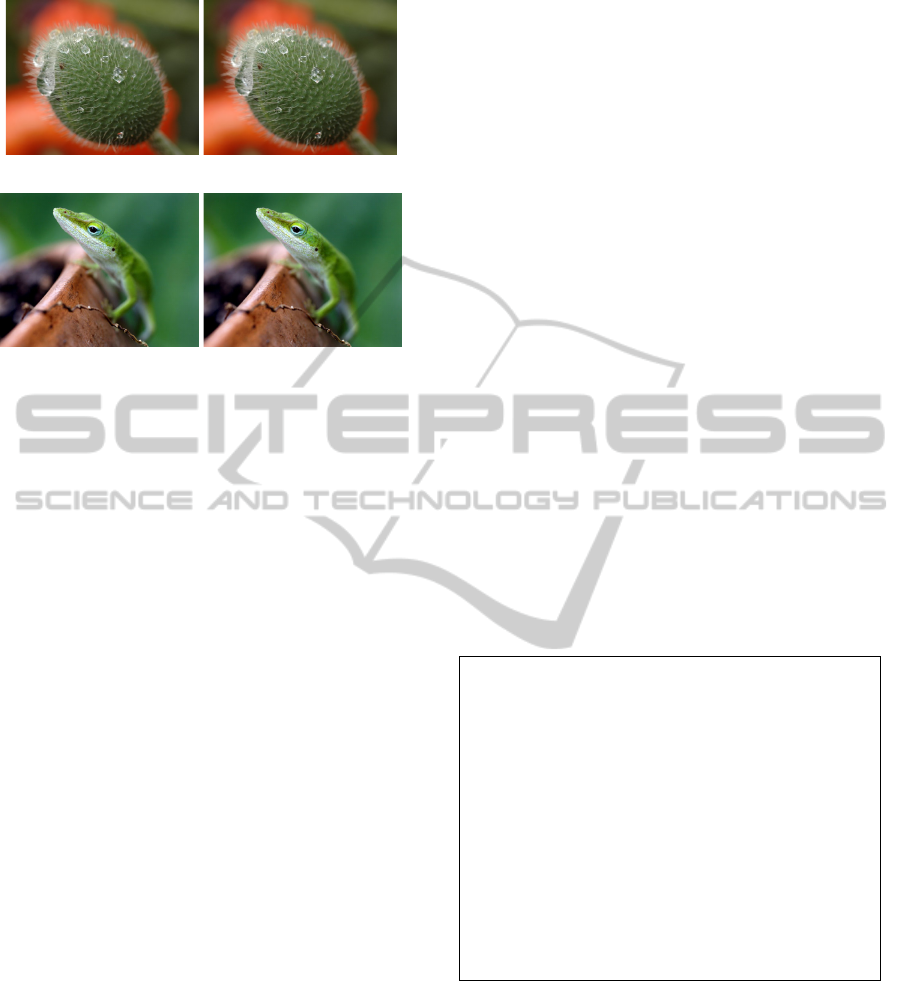
(a) Original image. (b) The area of focus.
(c) Original image. (d) The area of focus.
Figure 1: Test results on images with blurred background.
The present method is also based on the fact that lo-
cal contrast is weaker in blurred areas, but noise and
data corruption is considered on a graph theoretical
view-point. However, this procedure is different from
conventional morphology or correlation based image
corrections, like ones in (Licsar et al., 2010). The
main advantage of the present solution is to treat the
out-of-focus, noise and corruption problems in one
unified framework, by introducing a theoretically new
image segmentation method based on graph manipu-
lation.
2.1 Finding the Blurred Area in an
Image
The method of blurred area detection is to identify
the clusters of pixels corresponding to the blurred ar-
eas. The first phase of finding the clusters is to detect
the cluster cores (corresponding pixels), then the next
step is to classify the remaining pixels (blurred or fo-
cused area) depending on their similarities to cluster
cores. If a pixel is similar to any of the found cores, it
will belong to a blurred area in the image.
The mining of the cluster cores is an essential part
of numerous dense subgraph mining algorithms. A
core is a set of vertices that is sufficiently dense com-
pared to the average density of the graph. Especially
in a large graph it is a hard task to find a fast way of
recognizing the cores. In (Mishra et al., 2003) the
authors present a theoretical approach to solve this
problem for bipartite graphs in O(|V |) time, mining
ε-bicliques. |V | denotes the number of objects to be
clustered. Although the running time is linear in the
number of nodes, it is exponential in the parameter
showing how close we are to the complete bipartite
subgraphs. Another disadvantage is that it is only ap-
plicable if the size of a cluster is also O(|V |), and as it
is based on random sampling, it only finds the clusters
with a given probability.
In our solution, the running time of the core find-
ing FINDCORES() algorithm is O(|V |
2
) for an arbi-
trary graph. However, it is suitable for any cluster
size, and finds all cluster cores parallelly. Besides
this, if the input graph is sparse (E = O(V )), the run-
ning time is O(V ). Since in case of graphs of images,
where only the neighboring pixels are connected, we
have a sparse graph, we get a linear running time in
the number of pixels. We work with a modified mini-
mum weight spanning tree algorithm, and we use the
Kruskal-algorithm as a basis.
Since we do not need to have a subgraph without
circles, we only use the idea that the order of con-
necting vertices depends on how similar they are. An
obvious problem is to define the stopping conditions
of the algorithm. We will use d
limit
as a threshold to
ensure that in each cluster core the nodes are similar
enough. In each step, when the Kruskal-algorithm de-
cides whether an edge should be a part of the spanning
tree, we also check the diameter of the evolving com-
ponent. Let P be the pixel set of the image, and let M
be the feature matrix, where each µ
i
row is the corre-
sponding feature vector of pixel v
i
∈ V . The steps of
the algorithm are the following:
Algorithm [ClusterCores]=FINDCORES(M,
d
limit
).
1. Compute the distance between feature vectors
2. Increasing order of the distance values:
Dist
order
3. Inicialization: Let G = (V,E) be a graph,
E
′
={}; i = 1;
4. x = Dist
order
(i);
5. if x < d
limit
E = E ∪x; i = i + 1; else discard x;
6. If there are edges left, go to step 4.
7. ClusterCores = Connected components
The focused areas of the images are more de-
tailed than the blurred ones, hence differences be-
tween neighboring pixels tend to be higher. On the
other hand the components we get as an output (Clus-
terCores) contain the pixel-sets with the smallest dif-
ferences. These pixel-sets correspond to the blurred
areas of the image. Since we only need to make a dif-
ference between focused and blurred parts, as it was
mentioned before, the pixels corresponding to any of
the ClusterCores, will belong to the blurred area. The
d
limit
is the maximum weight of the edges we choose
GRAPH BASED SOLUTION FOR SEGMENTATION TASKS IN CASE OF OUT-OF-FOCUS, NOISY AND
CORRUPTED IMAGES
101

(a) (b) (c) (d) (e)
Figure 2: (a) Original image. (b) MSE-based method. (c) PSF-based algorithm. (d) Localized blind deconvolution algorithm.
(e) The presented method.
for the cluster cores and is set based on the distribu-
tion of edges. The algorithm will stop when adding
the edges corresponding to weight of d
limit
results in
the smallest changes in the output.
2.2 Test Results
We present two results for the FINDCORES() algo-
rithm for detecting blurred regions on several images
on Fig. 1: (a), (c) show the original images. The
pixels of the ClusterCores were masked and the re-
maining ones are selected as focused area, presented
on (b) and (d).
We have compared our results to other methods,
see Fig. 2. Fig. (a) shows the original image, (b) is
an MSE distance-based extraction algorithm (Kovacs
and Sziranyi, 2005), (c) PSF-based method, while
(d) is the method presented in (Kovacs and Sziranyi,
2007). Compared to the focus map the other algo-
rithms present (b)(c)(d), one should notice that the
proposed algorithms (e) detects the area in focus and
gives an output with a higher (pixel-level) resolution
with a small running time.
3 FINDING THE AREA OF
FOCUS IN A NOISY IMAGE
Handling noisy input data is an important task in fo-
cus detection as well. The proposed method can also
be applied as a preprocessing step for image restora-
tion algorithms, since selecting the area of focus in
noisy images offers the opportunity of applying dif-
ferent deblurring methods for areas of different con-
trast levels. Fig. 3 (a) and (b) present an example
of the original and noisy images. If we use the RGB
codes of the neighboring pixels as feature vectors, the
output of the FINDCORES() algorithm will become
almost unusable (Fig. 3 (c)). Since the algorithm
works on pixel-level, noisy pixel features might re-
sult in high edgeweights, or on the contrary we might
connect pixels that should be separated in the clean
image. To overcome this problem we extend the fea-
ture vectors of the vertices with the features of the
neighboring pixels (8-connection). With this, we get a
more robust method in case of pixel-level noises (Fig.
3 (c)).
4 FINDING THE AREA OF
FOCUS IN CASE OF
PARTIALLY MISSING
INFORMATION
Several problems occur for videos in online transmis-
sion when some portion of the image is missing (lines
or blocks). Since we do not have the data needed to
calculate the distance of these damaged pixels with
the former methods, we need a different model to
make use of the available information.
The role of the graph in the former section was
to find the cluster cores corresponding to the blurred
areas in the image. We will use a bipartite graph to
model and cluster the pixels of the cluster cores and
the pixels with damaged feature vectors. An impor-
tant improvement of this structure is applying a bi-
partite graph model complemented with a standard
model, leading to a new way of handling missing
data. The idea is to cluster the damaged feature vec-
tors and the corresponding pixels based on the avail-
able information by finding the dense bipartite sub-
graphs they belong to. The cores of these dense bi-
partite subgraphs are the cluster cores of the FIND-
CORES(algorithm). The proposed method has the
following steps:
Algorithm [MV]=CLUSTER(M
comp
, M
dam
, ε)
1. [ClusterCores] =FINDCORES(M
comp
,d
limit
)
2. [C
ClCore
] =CALC-
CORECHAR(ClusterCores,ε)
3. [MV
matrix
] =COMPUTE-MV(M
comp
,M
dam
)
IMAGAPP 2011 - International Conference on Imaging Theory and Applications
102

(a) Original image. (b) Noisy image with random noise of 30%.
(c) Output of the single-pixel based version of
the algorithm.
(d) Output of the neighborhood-based version
of the algorithm.
Figure 3: Result of the focus-detection in a noisy image using different versions of the algorithm.
(a) (b)
Figure 4: (a) Original test image. (b) Noisy image with
missing pixels of 10%.
Figure 5: Inner steps of the core finding algorithm. The
white areas present the most strongly connected pixels in
the image.
The FINDCORES() subalgorithm is applied to
detect the cluster cores, based on the pixels with
complete feature vectors (M
comp
). The CALC-
CORECHAR() method calculates a characteristic
vector for each cluster core, using the feature vec-
tors to select the relevant cluster-dependent features.
The pixel feature vectors are compared to the gained
characteristic vectors by the COMPUTE-MV() subal-
gorithm, which gives the membership values of each
pixel concerning each cluster as an output. This func-
tion calculates the membership values for pixel with
complete (M
comp
) and incomplete or damaged (M
dam
)
feature vectors as well.
4.1 Calculating Characteristics using a
Bipartite Graph
In the bipartite graph, the gained ClusterCores of
the FINDCORES() subalgorithm form dense bipartite
subgraphs, where the density definition is the same as
in (Mishra et al., 2003): Let G = (A,B, E) a bipartite
graph and 0 ≤ ε ≤ 1. A G
′
= (A
′
,B
′
,E
′
) subgraph is
an ε-quasi-biclique, if
∀v
i
∈ A
′
,|N
′
(v
i
)
′
| ≥ (1 − ε) · |B
′
|,whereN
′
(v
i
) ∈ B
′
The ε parameter can be bounded from below us-
ing the d
limit
parameter from the FINDCORES() sub-
algorithm. Although these cores are dense compared
to the average density of the graph, if ε ≥ ε
desired
then
to get better results the most weekly connected nodes
should be removed. As a result we get the relevant
features for each cluster core, see Fig. 6.
Based on the feature vectors of the nodes in each
core, we get the cluster characteristics. A weight vec-
GRAPH BASED SOLUTION FOR SEGMENTATION TASKS IN CASE OF OUT-OF-FOCUS, NOISY AND
CORRUPTED IMAGES
103
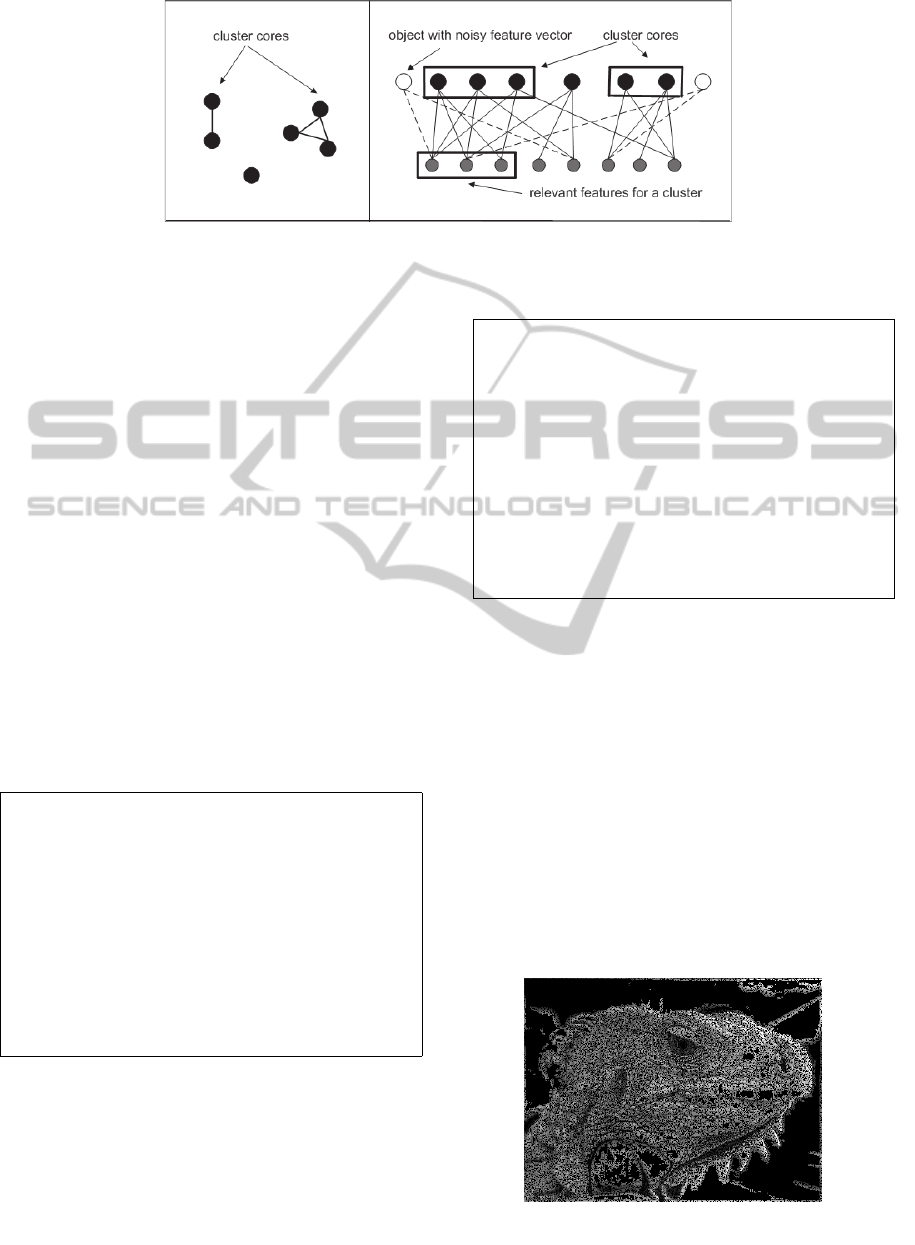
Figure 6: Cluster cores of the standard graph (left) found by the FINDCORES() method. Bipartite graph model: we determine
the relevant features for each cluster core; Pixels with incomplete feature vectors will be clustered based on the similarities
between their non-missing features and the relevant feature sets of the clusters.
tor is calculated as an average of the feature vectors
in each cluster core and the disparity vector as well.
If the disparity is low, the feature is relevant for the
given cluster. The feature relevance is important also
among the cluster cores. If the disparity within the
clusters is low for a given feature, then it is not suit-
able to make a distinction between the clusters.
The cluster characteristics consist of a characteris-
tics value, derived from the two disparity values, and a
weight value. The steps of the CALC-CORECHAR()
algorithm for calculating the characteristics are as fol-
lows: (The f () function is for normalizing the char-
acteristics.)
In this case, it is an apparent overcomplication to
select relevant features, since now we work with low
dimensional feature vectors. However, the presented
test results were only an illustration of the capacities
of the algorithm. The algorithm is capable of handling
high dimensional feature vectors, for example if the
SIFT features of the pixels are used.
Algorithm [c
ClCore
,w
ClCore
] = CALC-
CORECHAR (ClusterCores).
1. For each core c
i
in ClusterCores
2. w
ClCore
(i,k) = avg(µ
jk
) if v
j
∈ c
i
3. σ
cl
(i,k) = disp(µ
jk
)
4. For each feature F
k
σ
ClCores
(k) =
disp(w
ClCore
(i,k))
5. For each core c
i
in ClusterCores c
ClCore
(i,k) =
f (σ
ClCores
(k)/σ
cl
(i,k))
4.2 Clustering the Nodes
By clustering one usually means deciding to which
cluster core the given node belongs to. Here to each
object we calculate a membership-value, how strong
the connection to each core is, and a confidence value,
representing the reliability of this strenght value.
Algorithm [MV
matrix
]=COMPUTE-MV (M
comp
,
M
dam
, c
ClCore
, w
ClCore
).
1. For each v
i
in M
comp
and M
dam
2. For each c
j
cluster core if m
i j
̸= 0
3. di f f (i, j) = abs(m(i) − w
ClCore
( j))
4. d(i) = norm(di f f (i))
5. MV (i, j,k) = d(i) · c
ClCore
( j)
6. MembValue(i, j) = sum
k
[MV (i, j, k)]
7. Con f idence(i, j) = sum(m
i j
)/F if m
i j
̸= 0
We compare the m(i) feature vector of each vertex
v
i
with the cluster weight vector w
ClCore
( j), and we
apply normalization (step 4). The previously calcu-
lated characteristics will be used as relevance measure
weights. The membership values are derived from the
non-missing elements of the feature vectors. The con-
fidence value represents the ratio of the available in-
formation.
Let us notice that every node is re-clustered, even
the ones, we used for finding the cluster cores. If more
membership values are high in case of a given node,
it means the node belongs to both clusters. This way
the algorithm can be used even if the dataset contains
overlapping clusters.
Figure 7: The foreground part of the image selected by the
algorithm.
IMAGAPP 2011 - International Conference on Imaging Theory and Applications
104

5 CONCLUSIONS
We have implemented a theoretically new image seg-
mentation algorithm, based on graph core mining in
the structure of bipartite graphs. This approach makes
it possible to involve image reconstruction-like oper-
ations into the same framework: focus-detection, de-
noising and patching. This paper is only a posing of
a greater framework, where the method will be devel-
oped by: multi-level clusters, multi-scale evaluation,
texture-analysis and semantic level evaluation. The
above results encourage us to exploit the potential of
graph clustering in more complex image understand-
ing tasks. The algorithm can also be applied as a pre-
processing step for image restoration methods.
REFERENCES
Cousty, J., Bertrand, G., Najman, L., and Couprie, M.
(2009). Watershed cuts: Minimum spanning forests
and the drop of water principle. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 31:1362–
1374.
Du, N., Wu, B., Pei, X., Wang, B., and Xu, L. (2007). Com-
munity detection in large-scale social networks. In
Proceedings of the 9th WebKDD and 1st SNA-KDD
2007 workshop on Web mining and social network
analysis, pages 16–25, New York, NY, USA. ACM.
Faloutsos, C., McCurley, K. S., and Tomkins, A. (2004).
Connection subgraphs in social networks. In Proceed-
ings of the Workshop on Link Analysis, Counterter-
rorism, and Privacy (in conj. with SIAM International
Conference on Data Mining).
Kim, J.-S. and Hong, K.-S. (2009). Color-texture segmenta-
tion using unsupervised graph cuts. Pattern Recogn.,
42(5):735–750.
Kovacs, L. and Sziranyi, T. (2005). Relative focus map es-
timation using blind deconvolution. Optics Letters,
30:3021–3023.
Kovacs, L. and Sziranyi, T. (2007). Focus area extraction
by blind deconvolution for defining regions of interest.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 29(6):1080–1085.
Licsar, A., Sziranyi, T., and Czuni, L. (2010). Trainable
blotch detection on high resolution archive films min-
imizing the human interaction. Machine Vision and
Applications, 21(5):767–777.
Lim, S. H., Yen, J., and Wu, P. (2005). Detection of out-
of-focus digital photographs. Technical Report HPL
2005-14.
Mishra, N., Ron, D., and Swaminathan, R. (2003). On find-
ing large conjunctive clusters. In In Computational
Learning Theory, volume 2777, pages 448–462.
Mishra, N., Schreiber, R., Stanton, I., and Tarjan, R. E.
(2007). Clustering social networks. In WAW’07: Pro-
ceedings of the 5th international conference on Algo-
rithms and models for the web-graph, pages 56–67,
Berlin, Heidelberg. Springer-Verlag.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. IEEE Trans. Pattern Anal. Mach. In-
tell., 22(8):888–905.
GRAPH BASED SOLUTION FOR SEGMENTATION TASKS IN CASE OF OUT-OF-FOCUS, NOISY AND
CORRUPTED IMAGES
105
