
DETECTION OF OVERLOAD GENERATED FAULTS
IN ROBOT MANIPULATORS WITH FRICTION
L˝orinc M´arton
Institute of Robotics and Mechatronics, DLR - German Aerospace Center, M¨unchenerstr. 20, D-82234 Weßling, Germany
Keywords:
Actuator Fault Detection, Robot Manipulator, Disturbance Estimation, Friction.
Abstract:
This work proposes a detection method for faults that can appear in the actuators or gear transmissions of
robot manipulators due to increased resistance in joint movement or mechanical jamming. It is assumed that
the robot system is controlled using a computed torque-like algorithm. The fault detector is formulated as a
disturbance observer and it can also isolate the location of the fault, namely in which joint of the robot the
fault appears. The detector is based on a disturbance observer which is designed such that it is insensible to
high frequency additive disturbances and model uncertainties. Simulation results are presented to show the
applicability of the proposed fault detection method.
1 INTRODUCTION
Robots are often used in hazardous, inaccessible envi-
ronments where they are exposed to mechanical haz-
ards. After long operation periods the joint actuators
or the mechanical transmissions between the actua-
tors and the robot’s segments may be affected by full
or partial faults. Different types of faults may appear
in a robot control system. The increased resistance
in joint movement may happen due to the misalign-
ment in transmission or bearing or loss of lubrica-
tion. A locked joint type fault may appear because
of jamming of bearings or transmission, or failure of
the motor in braked condition. The collision of the
robot with objects that may appear unexpectedly in
its workspace also compromises the normal operation
of the robotic system. The collision detection can also
be formulated as a fault detection problem (Haddadin
et al., 2008).
In robot actuators and gear transmissions the fol-
lowing types of mechanical faults can be assumed:
incipient faults (e.g. increased resistance in motion,
that can be compensated by the control algorithm) in
the case of which the system can continue to operate
even if a small amount of fault is present, and total
faults (e.g. mechanical jamming), where the system
needs to be shut down. In many cases, by detecting
and isolating the incipient faults, the total failure can
be avoided.
The problem of detection and isolation of faults in
robot control systems were in focus of the researchers
starting from the first industrial applications of robot
manipulators. A surveyof the early results in this field
can be found in (Visinsky et al., 1994).
A substantial part of the currently introduced al-
gorithms for fault detection in robot control systems
are based on disturbance observers. A joint distur-
bance observer for robot manipulators was presented
in (Chan, 1995) to estimate the reaction force due
to component disinsertion for robot assembly tasks.
Based on the dynamic nonlinear model of the robot
such disturbance observers were proposed in (Dixon
et al., 2000) and (McIntyre et al., 2005) for fault de-
tection, that do not require acceleration measurement
or estimation. A nonlinear disturbance observer for
2 Degrees of Freedom robotic manipulators was pro-
posed in (Chen et al., 2000). Force and joint sen-
sors based robot fault detection and isolation meth-
ods were proposed in (Mattone and Luca, 2006) and
(Namvar and Aghili, 2008).
Fault detection requires precise modeling of the
manipulator and precise knowledge on the parame-
ters of the dynamic model. It is why the friction
in the joints of the manipulator should also be taken
into consideration during modeling. There are sev-
eral methods to model the friction in robot manip-
ulators and to identify the frictional parameters, see
(Lantos and Marton, 2011) and the references therein.
Moreover the increased friction in gear transmissions
may lead to faults that deteriorate the performance of
106
Márton L..
DETECTION OF OVERLOAD GENERATED FAULTS IN ROBOT MANIPULATORS WITH FRICTION.
DOI: 10.5220/0003405901060111
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 106-111
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

the robot control system. A neural network based
fault detection scheme for mechanical systems with
LuGre friction performing linear motions was pro-
posed in (Papadimitropoulos et al., 2007). In the pa-
per (Dunbar et al., 2001) a fault detection algorithm
was developed to isolate and detect friction changes
in a high precision pneumatic positioning mechanism.
The study (Jiang and Chowdhury, 2005) proposed a
fault detection algorithm for a class of nonlinear sys-
tems that can be applied for the detection of increased
friction in mechanical control systems.
In this work fault detection method is introduced
for robot manipulators to detect the faults generated
by abnormally increased joint load torques. The nov-
elty of the proposed approach in this work is, that the
load dependence of joint friction is explicitly taken
into consideration during fault detector design, hence
more reliable load estimator algorithms are achieved.
For the implementation of the proposed fault detec-
tion algorithm only joint position and velocity mea-
surements are required. The algorithm also uses as in-
put the linear component of the control signal, which
is generated by a computed torque-like control algo-
rithm. With the proposed approach the linear PI type
observers can be applied for load estimation in robot
control systems and simple structure disturbance ob-
servers can be designed. In this view the rest of
the paper is organized as follows: Section 2 presents
the model of the robot control system with friction.
Section 3 presents the proposed fault detection algo-
rithms. Simulation results are given in Section 4. The
results of this work are summarized in Section 5.
2 ROBOT MODELING AND
CONTROL
The dynamics of an n Degree Of Freedom (DOF) ma-
nipulator is described by the following relation:
H(q)
¨
q+ h(q,
˙
q) = τ− τ
F
, (1)
where q ∈ R
n
denotes the joint position vector, the
vector τ ∈ R
n
contains the control torques, τ
F
∈ R
n
is the vector of the friction generated forces/torques.
The inertial matrix H(q) ∈ R
n×n
is symmetric and
positive definite for every q, the vector h(q,
˙
q) ∈ R
n
includes the effect of gravitational, centrifugal and
Coriolis forces. It is assumed that q and
˙
q are mea-
surable.
2.1 Computed Torque Control
The tracking control task can be formulated as fol-
lows: Design a control input τ = (τ
1
τ
2
... τ
n
)
T
such
that the joint position q = (q
1
q
2
... q
n
)
T
tracks the de-
sired trajectory q
d
= (q
1d
q
2d
... q
nd
)
T
, i.e. the control
error e = q
d
−q tends to zero. The desired joint trajec-
tories q
di
are known bounded functions of time with
bounded, known first and second order derivatives.
Generally the model based and robust robot con-
trol algorithms, applied to solve the tracking control
of robotic systems, are based on the model (1) and
they directly use the terms H and h for the compensa-
tion of nonlinearities. The most frequently applied
control algorithm to solve the tracking problem is
the so called Computed Torque Method (Lewis et al.,
2004). The control signal is calculated as:
τ = H(q)(
¨
q
d
+ τ
PID
) + h(q,
˙
q) + τ
Fss
(
˙
q), (2)
where the control error dependent linear term τ
PID
is
generated by a high gain PD or a PID control algo-
rithm. It has to be formulated such that the charac-
teristic equation s
2
+ τ
PID
(s) = 0 to have stable roots.
The term τ
Fss
is an estimate of the frictional vector
τ
F
and it is introduced for the direct compensation of
frictional effects.
With the control law (2) the closed loop system
reads as:
¨
q
d
−
¨
q+ τ
PID
− H(q)
−1
(d
R
+ τ
FD
) = 0, (3)
where d
R
denotes the vector of additive modeling er-
rors which has to be considered because of imprecise
modeling of the nonlinear terms in the control law and
τ
FD
contains the friction modeling errors.
2.2 Load Dependent Friction Modeling
in Robots
In order to model the friction in the ith joint of the
robot (τ
Fi
), the dynamic LuGre friction model (As-
trom and de Wit, 2008) can be applied:
dz
i
dt
= ˙q
i
− σ
0i
| ˙q
i
|
g( ˙q
i
)
z
i
τ
Fi
( ˙q
i
) = σ
0i
z
i
+ σ
1i
dz
i
dt
+ F
Vi
˙q
i
, (4)
where z
i
is the unmeasurable internal state of the
model, whose value is always bounded. ˙q
i
is the ve-
locity of the ith joint, σ
1i
is a damping coefficient,
σ
0i
is a constant parameter representing the stiffness,
F
Vi
> 0 is the viscous friction coefficient, the func-
tion g( ˙q
i
) is a positive continuous function which de-
scribes the Stribeck effect (decreasing friction force
with increasing velocities in low velocity regime). It
can be defined as an exponential function of velocity:
g( ˙q
i
) = F
Ci
+ (F
Si
− F
Ci
)e
−| ˙q
i
|/ ˙q
Si
. F
Ci
> 0 denotes the
Coulomb friction coefficient, F
Si
> F
Ci
is the static
DETECTION OF OVERLOAD GENERATED FAULTS IN ROBOT MANIPULATORS WITH FRICTION
107
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Velocity
Friction Force
|τ
L
|
|τ
L
|
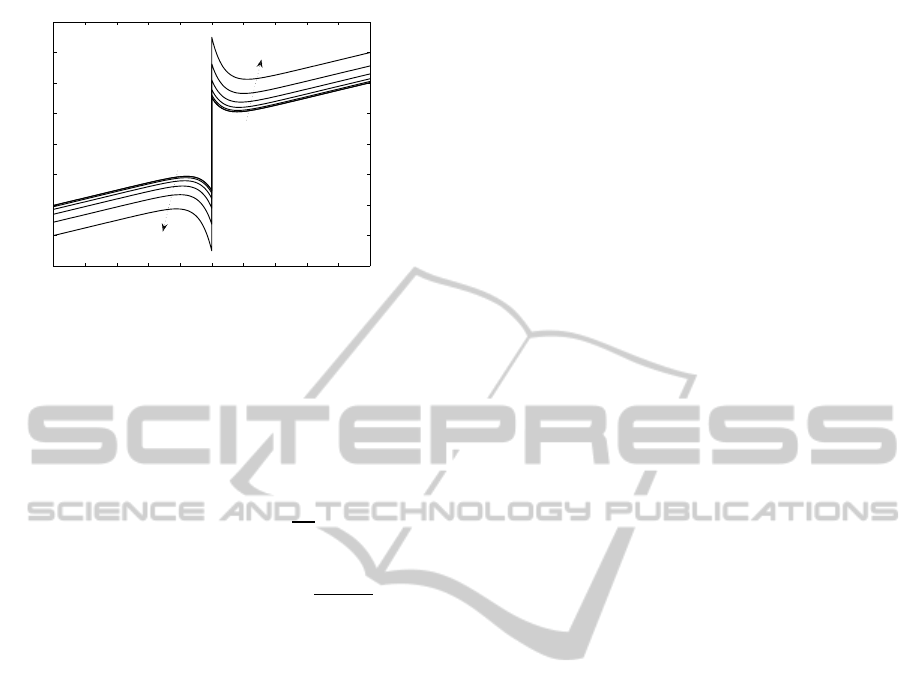
Figure 1: Stribeck friction with varying load.
friction term and ˙q
Si
> 0 is the Stribeck velocity of
the ith joint.
Denote with z
ssi
the steady state value of the
internal state z
i
. It can be expressed as: z
ssi
=
g( ˙q
i
)sgn( ˙q
i
)/σ
0i
. From (4) yields:
τ
Fi
= σ
0i
z
ssi
+ σ
0i
(z
i
− z
ssi
) + σ
1i
dz
i
dt
+ F
Vi
˙q
i
= g( ˙q
i
)sgn( ˙q
i
) + F
Vi
˙q
i
+ τ
FDi
(5)
τ
FDi
= σ
0i
(z
i
− z
ssi
) +
σ
1i
sgn( ˙q
i
) −
σ
0i
σ
1i
z
i
g( ˙q
i
)
| ˙q
i
|.
The dynamic part of the model (τ
FDi
) is bounded
by velocity dependent upper bound. The static, ve-
locity dependent term of the friction in (5) the has the
form:
τ
Fss
( ˙q
i
) =
F
Ci
+ (F
Si
− F
Ci
)e
−| ˙q
i
|/ ˙q
Si
sgn( ˙q
i
) + F
V
˙q
i
(6)
The parameters in the model (6) are not constant.
It is well known that the friction force varies accord-
ing to the applied normal force (load) on the surfaces
in contact. The dependency of the frictional parame-
ters on the joint load (force or torque) was rigorously
analyzed in the study (Bittencourt et al., 2010). It was
found that the static and Coulomb friction coefficients
increase linearly in function of the joint load but the
value of Stribeck velocity and the viscous friction co-
efficient does not change in function of the applied
load (see Figure 1). In the static friction model (6) the
load dependency can be introduced as:
τ
F
( ˙q
i
,τ
Li
) = (7)
=
F
Ci
+ (F
Si
− F
Ci
)e
−| ˙q
i
|/ ˙q
Si
sgn( ˙q
i
) + F
V
˙q
i
+(F
CLi
τ
Li
+ F
SCLi
e
−| ˙q
i
|/ ˙q
SLi
τ
Li
)sgn( ˙q
i
),
where τ
Li
is the load force/torque in the ithe joint.
It can be assumed that τ
Li
is positive (τ
Li
> 0).
Hence the load dependent frictional effects can be
modeled as:
τ
F
(
˙
q,τ
L
) = τ
Fss
(
˙
q) + F
L
(
˙
q)τ
L
+ τ
FD
, (8)
where τ
Fss
is given by (6), the frictional dynamic in-
duced modeling uncertainty τ
FD
is defined as in (5)
and the strictly positive diagonal matrix is given by
F
L
(
˙
q) = diag
h
F
CLi
+ F
SCLi
e
−| ˙q
i
|/ ˙q
SLi
sgn( ˙q
i
)
i
The parameters of τ
Fss
(
˙
q) can be identified using
standard methods, see e.g (Lantos and Marton, 2011).
The parameters in the matrix F
L
can be determinedus-
ing the method, presented in (Bittencourt et al., 2010).
The vector of joint load forces/torques (τ
L
) is gen-
erally unmeasurable. During normal robot operation
the value of the joint load forces/torques stay under a
reasonable limit. In the case of actuator or gear trans-
mission failure (e.g. jamming or collision) the joint
load increases and leaves its normal limits. Hence,
if τ
L
can be determined from input-output measure-
ments, its value can be used the generate the residual
for overload type faults.
3 FAULT DETECTOR
ALGORITHMS
If the load dependence of friction is taken into consid-
eration during robot modeling, the closed loop robot
control system (3) has to be reformulated as:
¨
q =
¨
q
d
+ τ
PID
− H(q)
−1
(F
L
(
˙
q)τ
L
+ τ
FD
+ d
R
). (9)
Note that it was assumed that according to the con-
trol law (2) the load independent part of the friction
(τ
Fss
(
˙
q)) was compensated.
Since the load is unknown, its value has to be es-
timated. Based on the estimated value of the load
(which will be denoted by
ˆ
τ
L
) the overload decision
signal for the ith joint of the robot can be formulated
as:
r
OLi
=
1, if |
ˆ
τ
Li
| > τ
LMAXi
(q,
˙
q,τ)
0, otherwise.
(10)
Here τ
LMAXi
(q,
˙
q,τ) denote the upper bound of the
load corresponding to normal operation.
In the followings two techniques will be proposed
to estimate the joint load.
3.1 PI Type Estimator Approach
Assume that the load (input disturbance vector) is
slowly varying and the following approximation can
be applied:
˙
τ
L
= 0. Based on this approximation the
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
108

equation (9) can be rewritten in a state space form as
follows:
˙
q
¨
q
˙
τ
L
=
O I O
O O −H(q)
−1
F
L
(
˙
q)
O O O
q
˙
q
τ
L
+
O
I
O
(
¨
q
d
+ τ
PID
) +
O
−H(q)
−1
O
(d
R
+ τ
FD
),
y =
I O O
O I O
q
˙
q
τ
L
. (11)
Here I denotes the n × n identity ma-
trix and O is an n × n matrix with only
zero entries. The model uncertainties
d
R
+ τ
FD
are treated here as high frequency
noises.
Based on the model (11) PI type observer (Gao
and Wang, 2006) can be designed that generates the
estimated value of the load (
ˆ
τ
L
). The gain matrix of
the observer should be designed such to deal with the
modeling error induced uncertainties. The state de-
pendency of the vector d
R
+ τ
FD
should also be taken
into consideration. For this case state estimator de-
sign procedures developed for Itˆo type processes can
be applied, that minimize the effect of the noise on the
estimation error, see for example (Dragan and Stoica,
2007), (Gershon et al., 2005). Since the state matrix
of the model (11) is state dependent, gain scheduling
techniques should also be applied during the estima-
tor gain design, by partitioning the state space of (11)
corresponding to H and F
L
and applying different es-
timator gain in each partition of the state space.
3.2 Disturbance Observer Approach
The degree of the PI type observer described below 3n
where n is the DOF of the robotic manipulator. Hence
in the case of manipulators with many degrees of free-
dom, due to the implementation costs, the method
presented in previous subsection may not be practi-
cal. In order to obtain a simpler residual generator
assume that the difference d
¨q
=
¨
q
d
−
¨
q can also be ap-
proximated with a high frequency noise signal. This
assumption is reasonable in constant velocity regimes
and when the trajectory is planned such that the ele-
ments of
¨
q
d
have small, limited values. In this case
the equation (9) can be rewritten as:
τ
L
= F
L
(
˙
q)
−1
H(q)τ
PID
+ d. (12)
d denotes the cumulated model uncertainties, i.e.
d = F
L
(
˙
q)
−1
(H(q)d
¨q
− τ
FD
− d
R
).
The load can be estimated using the following
equation:
ˆ
τ
L
= M(s)
F
L
(
˙
q)
−1
H(q)τ
PID
. (13)
Here M(s) denotes a diagonal proper, stable transfer
matrix, whose diagonal entries are low pass filters.
The aim of the filtering is to attenuate the effect of the
high frequencynoise (d) on the estimated load torque.
When low computational cost is desired, the trans-
fer matrix M(s) can be chosen as a diagonal matrix
with first order filters in the diagonal in the form
M(s) = diag
h
k
di
s+k
di
i
, where k
di
> 0, i = 1, n. With
this choice, in time domain, the disturbance observer
has the form:
˙
ˆ
τ
L
= K
d
F
L
(
˙
q)
−1
H(q)τ
PID
−
ˆ
τ
L
, (14)
where K
d
= diag[k
di
].
Remark: In the case of a collision of the robot’s
end-effector with an external object in the envi-
ronment, the joint load will also increase. If the
force/torque vector that applies on the end-effector
is denoted with f than the joint level load generated
during collision will be J(q)
T
f, where J denotes the
Jacobi matrix of the robot. In this case more than
one component of estimated load vector, generated by
(13), may overpass the threshold value in the relation
(10).
4 SIMULATION RESULTS
The disturbance observer algorithm presented in the
previous section was tested on a 2 DOF serial manip-
ulator with two rotational joints. The dynamic model
of these manipulators can be found in many textbooks
and papers, see e.g. (Lantos and Marton, 2011). The
following geometrical and dynamic parameters of the
robot arm were supposed, all in SI units: length of
the segments l
1
= l
2
= 1 m, position of the center of
gravity of the segments l
c1
= l
c2
= 0.5 m, mass of
the segments m
1
= m
2
= 5 kg, inertia of the segments
I
1zz
= I
2zz
= 1 kgm
2
, g = 9.81 m/s
2
.
The joint loads were taken as constant values over
which white noise type signals were added. The fault
was simulated as a 100% magnitude instantaneous
variation of the load value. For both joints two over-
loads were generated. Firstly, the overload faults ap-
pear independently in the joints (second 2 for joint 1,
second 6 for joint 2). In the 10th second of the simu-
lation the faults appear simultaneously in both joints
(see Figure 3).
During the simulation, the reference trajectories
for both joints were chosen to have acceleration, de-
celeration and constant velocity regimes both in posi-
tive and negative velocity domains with ±1 rad/s ve-
locity limits for both joints. The joint trajectories are
presented in Figure 2.
DETECTION OF OVERLOAD GENERATED FAULTS IN ROBOT MANIPULATORS WITH FRICTION
109

The controller of the robot was implemented using
the algorithm (2). To calculate the τ
PID
term of the
control algorithm two approaches were tested: a PD
controller with high gain amplification and a PID con-
troller. The disturbance observer was implemented
using the relation (14) with k
d1
= k
d2
= 25 for which
the cutoff frequency of the disturbance observer is
around 10 Hz for both channels. In order to test the
robustness of the proposed fault detection method the
inertial parameters I
1
, I
2
and the parameters l
c1
and
l
c2
were departed (decreased) with 5% from their real
values in the equations of the control algorithm and
the disturbance observer.
In the case of fault, the control errors increases in
both joints even when the fault influences only one
joint. When the linear part of the control is a high
gain PD, the fault increases the tracking errors. When
the linear part of the control is PID type the integral
term in the controller compensates the increased load
value, the tracking error converges to zero again (see
Figures 4 and 6).
In the Figures 5 and 7 it can be seen that in both
cases (with PD and PID type linear control terms) the
estimated loads track quickly and precisely the real
value of the loads, hence the generated signals can
be used for fault detection. In both cases the esti-
mated disturbances have similar evolutions in time,
which shows that the disturbance observer has little
dependence on the chosen linear term in the control
law. The increased load is also isolated precisely at
joint level, hence the location of the overload gener-
ated fault can be determined based on the disturbance
observer generated signal.
5 CONCLUSIONS
A fault detection method was introduced for robot
control systems controlled by computed torque-like
control algorithms. During detector design it was
taken into consideration that the friction in the joints
of the robot depends on the load induced disturbance
forces or torques. The residual is generated based
on the estimated load value, by assuming that the
upper bound of the load is known. The proposed
load observer can be implemented with low compu-
tational costs. Simulation measurements showed that
the proposed disturbance observer can precisely es-
timate and isolate the overload at joint level and it
is robust against modeling errors and high frequency
disturbances.
ACKNOWLEDGEMENTS
The research work of L. M´arton was supported by
Alexander von Humboldt Stiftung/Foundation schol-
arship for post-doctoral researchers and by the Hun-
garian National Research program under grant No.
OTKA K71762.
REFERENCES
Astrom, K. J. and de Wit, C. C. (2008). Revisiting the Lu-
Gre friction model. IEEE Control Systems Magazine,
28(6):101–114.
Bittencourt, A. C., Wernholt, E., Sander-Tavallaey, S., and
Bordardh, T. (2010). An extended friction model
to capture the load and temperature effects in robot
joints. In IEEE/RSJ International Conference on In-
telligent Robots and Systems, Taipei, Taiwan.
Chan, S. P. (1995). A disturbance observer for robot ma-
nipulators with application to electronic components
assembly. IEEE Trans. on Industrial Electronics,
42(5):487–493.
Chen, W.-H., Ballance, D. J., Gawthrop, P. J., and OReilly,
J. (2000). A nonlinear disturbance observer for robotic
manipulators. IEEE Trans. on Industrial Electronics,
7(4):932–938.
Dixon, W. E., Walker, I. D., Dawson, D. M., and Hartranft,
J. P. (2000). Fault detection for robot manipulators
with parametric uncertainty: A prediction-error-based
approach. IEEE Trans. on Robotics and Automation,
16(6):689–699.
Dragan, V. and Stoica, A.-M. (2007). Kalman-type esti-
mation for systems corrupted with additive and mul-
tiplicative white noise. In Proc. of The International
Symposium on System Theory, Automation, Robotics,
Computers, Informatics, Electronics and Instrumenta-
tion, Craiova, Romania.
Dunbar, W. B., de Callafon, R. A., and Kosmatka, J. B.
(2001). Coulomb and viscous friction fault detec-
tion with application to a pneumatic actuator. In
IEEE/ASME International Conference on Advanced
Intelligent Mechatronics, Como, Italy.
Gao, Z. and Wang, H. (2006). Descriptor observer ap-
proaches for multivariable systems with measurement
noises and application in fault detection and diagnosis.
Systems & Control Letters, 55:304 – 313.
Gershon, E., Shacked, U., and Yaesh, I. (2005). H
∞
Control
and Estimation of State-multiplicative Linear systems.
Springer, London, UK.
Haddadin, S., Albu-Schaffer, A., Luca, A. D., and
Hirzinger, G. (2008). Collision detection and reac-
tion: A contribution to safe physical human-robot in-
teraction. In IEEE/RSJ International Conference on
Intelligent Robots and Systems, Nice, France.
Jiang, B. and Chowdhury, F. N. (2005). Parameter fault
detection and estimation of a class of nonlinear sys-
tems using observers. Journal of the Franklin Insti-
tute, 342:725–736.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
110

Lantos, B. and Marton, L. (2011). Nonlinear Control of
Vehicles and Robots. Springer, London, UK.
Lewis, F. L., Dawson, D. M., and Abdallah, C. T. (2004).
Robot Manipulator Control. Marcel Dekker, Inc.,
New York.
Mattone, R. and Luca, A. D. (2006). Relaxed fault detec-
tion and isolation: An application to a nonlinear case
study. Automatica, 42:109–116.
McIntyre, M. L., W. E. Dixon, D. M. D., and Walker, I. D.
(2005). Fault identification for robot manipulators.
IEEE Trans. on Robotics, 21(5):1028–1034.
Namvar, M. and Aghili, F. (2008). Fault diagnosis in robotic
manipulators using joint torque sensing. In Proceed-
ings of the 17th World Congress The International
Federation of Automatic Control, Seoul, Korea.
Papadimitropoulos, A., Rovithakis, G. A., and Parisini,
T. (2007). Fault detection in mechanical systems
with friction phenomena: An online neural approxi-
mation approach. IEEE Trans. on Neural Networks,
18(4):1067–1082.
Visinsky, M. L., Cavallaro, J. R., and Walker, I. D. (1994).
Robotic fault detection and fault tolerance: A survey.
Reliability Engineering and System Safety, 46:139–
158.
0 5 10 15
−1
−0.5
0
0.5
1
1.5
Time (s)
Realized Trajectories of the Joints
Joint Position (rad)
Joint Velocity (rad/s)
Figure 2: Robot trajectories (Joints 1 and 2).
0 5 10 15
0
5
10
15
Load on Joint 1 (Nm)
0 5 10 15
0
2
4
6
Time (s)
Load on Joint 2 (Nm)
Figure 3: Joint loads.
0 5 10 15
−1
0
1
2
3
x 10
−4
Position Error − 1st Joint (rad)
High Gain PD Control
0 5 10 15
−5
0
5
x 10
−4
Time (s)
Position Error − 2nd Joint (rad)
Figure 4: Position tracking errors - High gain PD Control.
0 5 10 15
0
5
10
15
Residual − Joint 1 (Nm)
High Gain PD Control
0 5 10 15
0
2
4
6
Time (s)
Residual − Joint 2 (Nm)
Figure 5: Generated Residual Signals - High gain PD Con-
trol.
0 5 10 15
−4
−2
0
2
4
x 10
−4
Position Error − 1st Joint (rad)
PID Control
0 5 10 15
−5
0
5
x 10
−4
Time (s)
Position Error − 2nd Joint (rad)
Figure 6: Position tracking errors - PID Control.
0 5 10 15
0
5
10
15
Residual − Joint 1 (Nm)
PID Control
0 5 10 15
0
2
4
6
Time (s)
Residual − Joint 2 (Nm)
Figure 7: Generated Residual Signals - PID Control.
DETECTION OF OVERLOAD GENERATED FAULTS IN ROBOT MANIPULATORS WITH FRICTION
111
