
IDENTIFICATION AND CONTROL OF AN ELECTRO
HYDRAULIC ROBOT PARTICLE SWARM
OPTIMIZATION-NEURAL NETWORK(PSO-NN) APPROACH
M. Taylan Daş
Roketsan Missile Company, Elmadağ-Ankara, Turkey
L. Canan Dülger, Sadettin Kapucu
University of Gaziantep, Department of Mechanical Engineering, Gaziantep, Turkey
Keywords: Particle Swarm Optimization, Electro-Hydraulic Robot, Neural Networks (NNs), System Identification (SI).
Abstract: This paper proposes a novel approach based on the training of the Neural Network method with Particle
Swarm Optimization (PSO-NN) for identification of a hydraulic servo robot. The robot is considered to
have two degrees of freedom; one is rotational and the other is translational. A feed forward NN is designed
for the problem and the weights of the network are trained using Particle Swarm Optimization (PSO)
algorithm. In order to demonstrate the performance of PSO-NN, the designed network is also trained and
tested with the Back Propagation (BP-NN) algorithm. Test results validated that the performance of PSO-
NN is better than BP-NN algorithm both in convergence speed and in convergence accuracy. The results
also illustrate that PSO-NN algorithm is an applicable and effective method for identification and control of
a robotic system.
1 INTRODUCTION
Neural network (NN) is a powerful tool for complex
applications including robotics and industry process,
and optimization. NNs can be used to approximate
any linear or nonlinear function. The NN controllers
hold out the potential for control systems that mimic
the human capacity for learning and how to provide
the correct input signals that result in a desired
response without detailed knowledge of the system
dynamics. A trained neural network can be thought
of as an "expert" in the category of information it
has been given to analyze. This new situation gives
an opportunity to obtain new projections of system
response (Hong et al., 2002), (Van Den Bergh,
Engelbrecht, 2000).
NNs are extensively used in the literature for
different robotic applications. Generally, NN
learning and tests are applied to forward or inverse
kinematics simulation results. (Lewis, 1996) has
introduced a NN controller design algorithms for
rigid robot arms, force control and parallel-link
robot arms. (He and Sepehri, 1999) have presented a
model and predicted the performance of hydraulic
servo actuators with experimental data. Levenberg-
Marquardt (LM) algorithm was applied to train the
network. (Abdelhameed, 1999) has developed an
adaptive NN controller for robot trajectory tracking
problem. The results for a polar robot manipulator
were presented to demonstrate the effectiveness of
proposed system. (Hong et al., 2002) have used a
multi-layer NN based on LM training algorithm for
the tracking control problem of the electro-hydraulic
servo system. (Ghobakhloo and Eghtesad, 2005)
have developed a multi-layer BP-NN algorithm to
solve the forward kinematics problem of a redundant
hydraulic shoulder having three degrees of rotational
freedom.
PSO is a population based stochastic
optimization technique developed by Dr. Eberhart
and Dr. Kennedy in 1995, inspired by social
behaviour of bird flocking or fish schooling
(Kennedy and Eberhart, 1995). Up to date, PSO
applied to many different problems. (Zhang et al.,
2000) have studied on new evolutionary system for
evolving artificial neural networks, which is based
on the PSO. The results of PSO-NN harmonize the
49
Taylan Da¸s M., Canan Dülger L. and Kapucu S..
IDENTIFICATION AND CONTROL OF AN ELECTRO HYDRAULIC ROBOT PARTICLE SWARM OPTIMIZATION-NEURAL NETWORK(PSO-NN)
APPROACH.
DOI: 10.5220/0003447600490055
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 49-55
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
architecture and weights of NN. (Liu et al., 2004)
have studied a different variable neighbourhood
model ‘vbest’ in PSO search method for NN
learning, instead of ‘gbest’ and ‘lbest’. (Zhang et al.,
2006) have developed a hybrid PSO-BP algorithm
for feed forward NN training. Recently, (Das and
Dulger, 2007) have recently designed a PSO
algorithm for optimizing the parameters of the PD
controller which is applied on position control of a
four bar mechanism system. Many researchers were
used NNs and their variants with PSO for different
dynamic systems.
Several studies have also been reported on
identification of hydraulic servo systems also
identification and control of dynamic systems using
NNs. It is not possible to include all applications
which NNs have been applied A few research study
is included where our study is based on them.
(Narendra and Parthasamathy, 1990) have used the
NNs for the identification and control of nonlinear
dynamic systems. (Kapucu, 1994) has performed a
study on identification of a hydraulic robot, named
as ARTISAN which will originate the study
presented here. He has taken a SISO model with
assumption of the independent joint dynamics.
Following that, MIMO model is studied to trace a
circle using finite difference equations. However,
PSO-NN algorithm is not seen any theoretical and
experimental application of a hydraulic robot system
in a literature study.
This study addresses the identification of the
hydraulic robot with PSO-NN where PSO has been
used to train the NNs. A feed forward NN based
PSO algorithm is proposed for identification a
hydraulic robot. NNs approximate arbitrary input-
output mappings to identify the unknown function.
Identification of the hydraulic robot is given in
Section 2. A brief overview on the PSO algorithm
and the application of the algorithm for the robot
identification are presented in Section 3. The
experimental system is explained in Section 4. Test
results and their validation are then presented in
Section 5. Finally conclusions are included with
comparisons on methods, PSO-NN and BP-NN
algorithm.
2 IDENTIFICATION OF
ELECTRO HYDRAULIC
ROBOT
Determining the nonlinear motion equations of
hydraulic robot is a complex process. In system
identification, mathematical models are built from
the systems experimental data. This model can be
expressed mathematically relation with the outputs
to the inputs. In this study, the problem becomes
identification of a nonlinear system to get better
control on the trajectory requirement. Initially a NN
model for the plant is developed for the system
identification. This NN plant model is then used
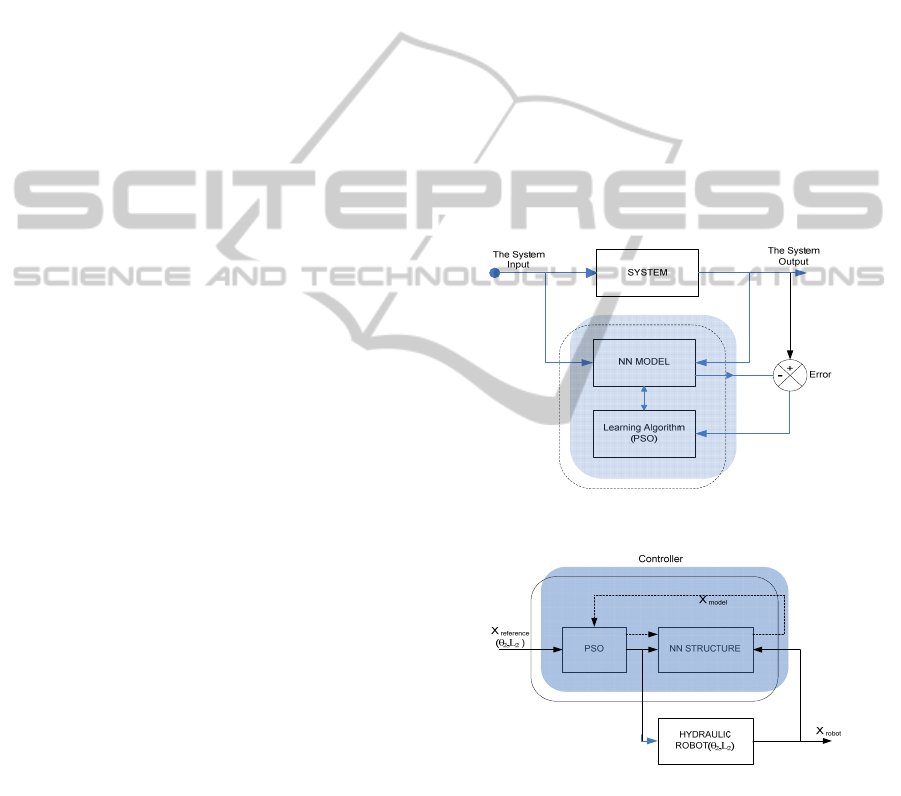
with PSO algorithm to train the controller. Referring
to (Narendra and Parthasamathy, 1990), Figure 1 can
be presented for the structure of system
identification. So the system error between the
system output and the NN output, is used the NN
training signal.
The following block diagram, Figure 2 illustrates
the control process for the robot. The NN model and
the PSO block are included in the controller. This
process can be performed for each axis of the
hydraulic robot, θ
2
and L
2
respectively in RP
configuration.
Figure 1: System Identification
Figure 2: The Control Block Diagram of the electro
hydraulic robot with PSO-NN.
3 CONTROL ALGORITHMS
3.1 Particle Swarm Optimization
The PSO algorithm includes a swarm of particles
moving in the n-dimensional problem space where
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
50

each particle is evaluated by a fitness function to be
optimized. Each particle in the swarm has a position
and a velocity. The particles fly through the problem
space by following the current optimum particles
(Kennedy and Eberhart, 1995). PSO is initialized
with a group of random particles (solutions) and
then searches for the optimum by updating
generations. Each particle is updated by following
two "best" values. The first one is the best solution
p
best
that a particle has achieved so far. The other one
is the global best value g
best
that is obtained by any
particle in the population so far. After finding the
two best values, the particle updates its velocity and
positions with following equations.
)()(
2211
1
k
ibest
k
i
i
best
k
i
k
i
xgrcxprcwvv −+−+=
+
(1)
11 ++
+=
k
i
k
i
k
i
vxx
(2)
v
i
k
is the particle velocity, x
i
k
is the current
particle (solution), p
best
is the best solution value
among the particle found in the current iteration, g
best
is the global best solution achieved so far, r
1
, r
2
are
random numbers between (0, 1), c
1
,c
2
are the
learning factors usually taken as c
1
=c
2
=2.
The performance of the PSO algorithm depends
on many parameters; the number of particles and the
maximum velocity parameter. This parameter affects
the run-time significantly; a balance between more
particles (variety) and fewer particles (speed) should
be evaluated in the swarm. The maximum velocity
parameter effects the convergence speed of the
algorithm limits the maximum jump that a particle
can make in one step. Thus a too large value for this
parameter will result in oscillations, while a too
small value could cause the particle to become
trapped in local minima (Bose and Liang, 1996).
3.2 Back Propagation NNs
Both Multi-layer and single perceptions are mostly
trained with BP algorithm in supervised learning. BP
is one of the most common neural network
structures, as it is easy to implement and efficiency
is good. Therefore BP is selected to compare with
the proposed algorithm. BP algorithm uses gradient
descent method to minimize the total squared error
of output. A BP net is a multilayer, feed forward
network that is trained by back propagating errors
using generalized delta rule (Krose and Van der
Smart, 1996). The whole back-propagation process
is very clear. When a learning pattern is clamped,
the activation values are propagated to the output
units, and the actual network output is compared
with the desired output values. It usually ends up
with an error where requirement is to bring zero in
each one of the output units.
3.3 The Proposed Algorithm
For the solution of the problem a NN structure that
the input layer N has two nodes (N=2), hidden layer
J with twenty nodes (J=20) and output layer L with
two nodes (L=2) are used. The structure of the
network can be seen in Figure 3. Pseudo-code of the
proposed algorithm is given in Table 1.
The proposed NN structure is trained with PSO
which offers a simple and effective way as a search
algorithm. Both, the hidden and the output transfer
functions are both assumed as sigmoid function. The
output of the hidden node is calculated as;
5,..,2,1))),(exp(1/(1 f(j)
0
=−⋅−+=
∑
=
jxw
j
N
n
nnj
θλ
(3)
Input Layer Hidden Layer Output Layer
x
1
x
2
d
2
d
1
Figure 3: General Neural Network structure of PSO-NN
algorithm.
Where w
n j
is the weights between the n
th
node of
input layer and j
th
node of hidden layer, θ
j
is the
threshold of the hidden layer, x
n
is the n
th
input and λ
is the activation gain. The desired output d of the l
th
output layer d
l
is;
2,1,)( =−⋅=
∑
ljfwd
lljl
θ
(4)
Where w
lj
is the weight from the j
th
hidden node
to the l
th
output node, θ
l
is the threshold of the output
layer. The error E[n] is the sum of squares of the
error over all output units; n is the set of trained
example.
2
1
)]()([
2
1
)(
∑
=
−=
L
j
desiredactual
ndndnE
(5)
where,
∑
=
=
m
n
T
nEE
1
)(
d
actual
is the actual output value taken from the
system, d
desired
is the desired output value in each
PSO
PSO
IDENTIFICATION AND CONTROL OF AN ELECTRO HYDRAULIC ROBOT PARTICLE SWARM
OPTIMIZATION-NEURAL NETWORK(PSO-NN) APPROACH
51

iteration and E
T
is the total error. This error is
accepted as the fitness function of a particle that can
be calculated by
2
)(
)(
2
∑
−
==
desiredactual
Ti
dd
EparticleFitness
(6)
The weights between the n
th
node of input layer
and j
th
node of hidden layer (w
00
, w
01
,…,w
40
, w
41
) and
the j
th
node of hidden and l
th
node of the output layer
(w
00
, w
01
,w
02
,…,w
13
, w
14
) are represented as a vector.
The obtained weight vector is accepted as the
dimensions of a particle. The particle is defined as:
particle
i
= (w
00
,w
01
,w
10
,w
11
,w
20
,w
21
,w
30
,w
31
,w
40
,w
41
,
w
00
,w
01
,w
02
,w
00
,w
01
,w
02
,w
13
,w
14,
w
13
,w
14
)
Table 1: The proposed PSO-NN algorithm.
Step 1: Initialization of the network
Choose the number of nodes for the
input, output and hidden layers
Step 2: Determine the Initial value of
weights between -1.0 and 1.0
Choose a learning rate between 0
and 1.0
Step3: Learning step and calculation
of the weight values.
Define PSO parameters (c
1
, c
2
,w, r
1
, r
2
)
Initialize Population
Calculate fitness value of Each
particle
While (error criteria is not attained)
{Calculate p
best
value
Calculate g
best
value
Update velocity and position
Vector of each particle Evaluate}
End Criteria (maximum iterations)
Step4: Test the accuracy of the
network on a test database.
Step5: If the accuracy is less than
the desired error rate, then
give new parameters to the
network and start again.
4 THE EXPERIMENTAL SYSTEM
The PSO-NN algorithm is applied on the spherical
hydraulically driven robot which is available at
Department of Mechanical Engineering, Dynamic
Systems Laboratory, Gaziantep University, and is
called as ‘ARTISAN’. In the literature, different
studies have been performed for the control of the
ARTISAN electro-hydraulic robot. Firstly, (Kapucu,
1994) performed a study on adaptive control of this
robot by visual data. Later, (Kirecci et al., 2003)
applied self tuning method for controlling this robot
for better trajectory tracking and presented
experimental results.
Figure 4 shows a photograph of the manipulator
which originally has 3 degrees of freedom. Two
revolute and one prismatic joint are included to
represent RRP (Revolute-Revolute-Prismatic)
configuration (Kapucu, 1994).
Figure 4: The Electro-Hydraulic Robot. (ARTISAN).
During the tests on the application of the
algorithm, its rotational joint moving perpendicular
to the horizontal plane is fixed and other joints
representing RP (Revolute-Prismatic) configuration
are controlled by servo valves in closed loop
operating in vertical plane. The experimental system
consists of a hydraulically driven spherical
manipulator, PC, an interface card for required
communication, hydraulic actuators and servo
amplifier with position transducers fitted each joint.
Block diagram for the hydraulic system is given
in Figure 5 with negative feedback. The manipulator
links are controlled by Bosch regulator valves of
0811404-028 type in a closed loop with rotary
potentiometer to obtain desired motion for each
joint. The supply of hydraulic pressure and flow to
the servo valves are provided by 22 kW hydraulic
power units which can supply up to 95 lt/min at 0.12
MPa.
Figure 5: The block diagram of system.
Three dimensional representation of the robot is
given in Figure 6. The robot end-point positions are
specified in terms of the chosen coordinates as: the
base rotation θ
0
, the elevation angle θ
2,
the reach L
2
.
Forward kinematics is applied to as P
x
, P
y
and P
z
to
calculate end point positions by using configuration
of ARTISAN given Figure 6.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
52

22
022
022
sin
sincos
coscos
θ
θθ
θ
θ
LP
LP
LP
z
y
x
=
=
=
(7)
X
Z
Y
2
θ
0
θ
2
L
Figure 6: Configuration of ARTISAN Robot.
4.1 Test Results and Validation
Test results of the proposed PSO-NN algorithm are
presented in this section. The input values of the
joints (θ
2
, L
2
) are applied to the network as the input
1 and the input 2. Similarly, the responses of joints
are accepted as output1 and output 2. Different test
trajectories are employed to show validation of
results. In order to normalize the experimental data
to the range [0, 1], the value y(x) at each (x) point
was normalized to according to the equation given
for all input and output points.
minmax
min
)(
yy
yy
xy
−
−
=
(8)
Where; y(x) is the normalized value (between 0
and 1), y is the reference value, y
min
is the minimum
allowed value {taken as (-18 degrees for the output1,
θ
2
), (69cm for the output2, L
2
)}, y
max
is the
maximum allowed value {taken as (18 degrees for
the output1), (154cm for the output2)}
Two examples are implemented and presented
for the validation stage here. A population of 45
particles is used for the PSO-NN algorithm.
Numbers of particles and hidden layers have been
tried on the system in different in various training.
Learning factors c
1
and c
2
are set to 2.0. Both the
PSO-NN and BP-NN algorithm is trained for 5000
iterations. Learning rate and momentum rate is
chosen between 0 and 1. The initial weight values
have importance on training results if a priori
knowledge is available for weights. Initial weights
of the both algorithms are chosen between -1 and 1
randomly. Both algorithms are started with the same
initial weight values. The performance of the
proposed algorithm is tried with many different
initial weights. However, the convergence rate of the
algorithm did not change. The algorithms are coded
in C and run on a P4 with 2.4 GHz. After training
the network with the training values, the chosen test
values are fed into the trained algorithms. The
performances of PSO-NN algorithm and BP-NN
algorithm are compared with respect to the mean
squared error.
In the first example, 120 data have been recorded
experimentally in total. It represents an arbitrary
trajectory chosen for identification purpose. Half of
these data have been used for training and the rest of
the data have been used in the test session. The
position curves for the electro-hydraulic robot on the
rotational coordinate, θ
2
and the translational
coordinate, L
2
with the given signal and the output
values obtained for the test values by PSO-NN and
BP-NN algorithm are given in Figures 7(a) and 7(b).
One axis, the rotational is shown by radians and the
other axis is shown by meters, in 2 degrees of
freedom configuration (RP).
In the second example, 240 data have been
recorded experimentally. A circular trajectory is
traced in the second test by giving the coordinates of
a circle to a hydraulic robot, again representing RP
configuration. Similar to the above example, half of
these data have been used for the training and the
rest of the data have been used in the test session
Test values for circular trajectory are given in
Figures 8(a) and 8(b). In both results, Figures 7 and
8 show the reference signal with the tested
controller. The system follows the reference signal
with some error at some points. It can be seen that
PSO-NN algorithm produces better output values
than BP-NN algorithm in both examples. This error
can obviously be reduced by using more training
data, yielding increase in computation in the
network
The overall correction rate of the test results of
PSO-NN and BP-NN algorithms can be seen in
Table 2. Average rates are represented in Table 2,
additionally; PSO-NN gives better results in most
cases. The proposed PSO-NN algorithm converges
faster than BP-NN algorithm during the tests on the
electro-hydraulic system according to the reference.
Table 2 can be explained as the following. The value
of total error rate is found as 0.010995 for PSO-NN;
however total error rate of BP-NN algorithm is
0.042751 at the end of the 5000 iteration. In an
overall view, PSO-NN passed the total value of BP-
IDENTIFICATION AND CONTROL OF AN ELECTRO HYDRAULIC ROBOT PARTICLE SWARM
OPTIMIZATION-NEURAL NETWORK(PSO-NN) APPROACH
53
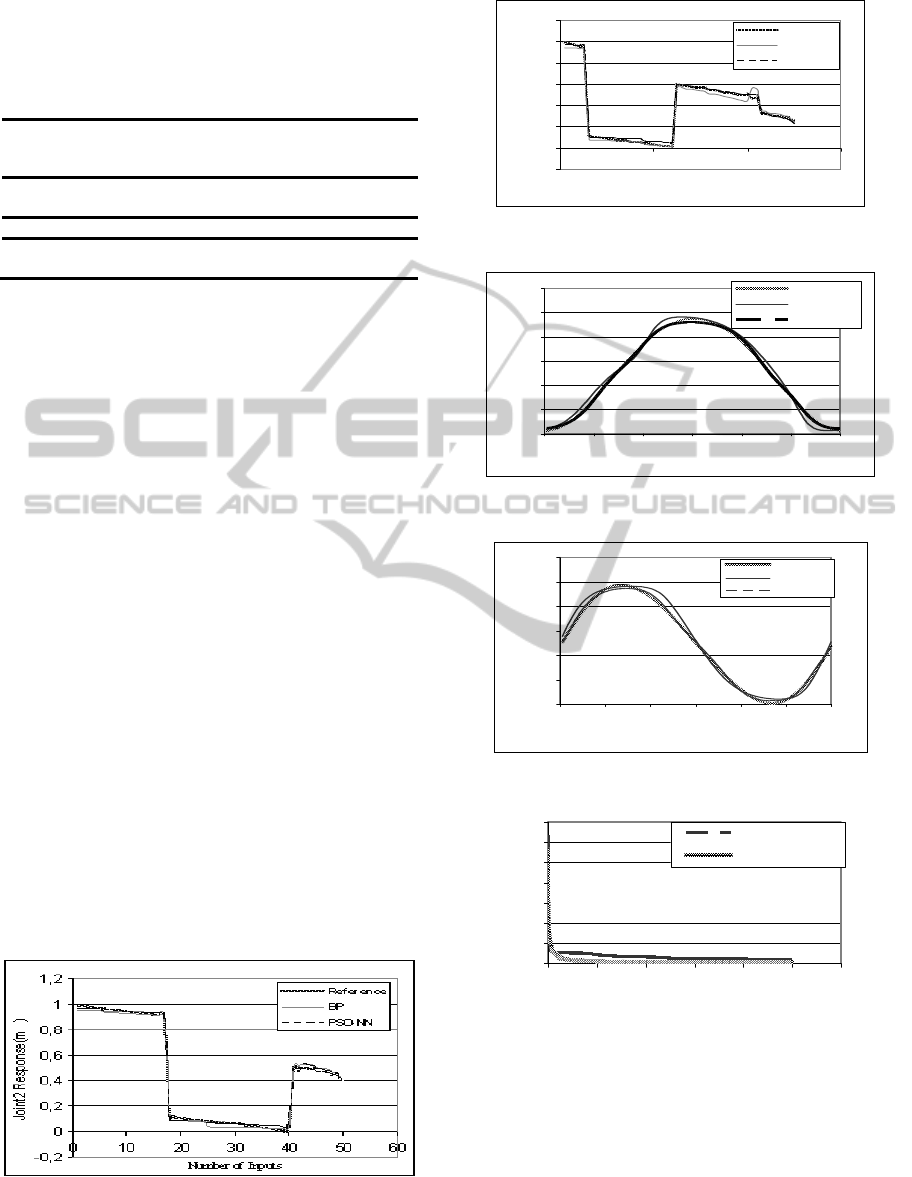
NN after the 388
th
iteration in the example with any
more computation. The convergence rate of both
algorithms can be seen in Figure 9.
Table 2: PSO-NN and BP-NN test results.
The 1
st
Test
PSO-NN
Correction Rate
(CR) (%)
BP-NN CR (%)
Output 1(θ
2
) 96.425 93.0746
Output 2(L
2
) 90.2669 88.1498
The 2
nd
Test PSO-NN CR (%) BP-NN CR (%)
Output 1(θ
2
) 96,407 89.321
Output 2(L
2
) 95,574 86,4
5 CONCLUSIONS
In this paper, PSO-NN algorithm is proposed for the
tracking problem of the electro-hydraulic servo
robot with highly nonlinear characteristics. The
PSO-NN algorithm is compared with BP-NN
algorithm for solving the problem of identification.
For the solution of the problem, a NN structure
having the input layer N with two nodes (N=2),
hidden layer J with twenty nodes (J=20) and output
layer L with two nodes (L=2) is used. The designed
network is also trained and tested with the BP-NN
algorithm. Test results showed that the performance
of PSO-NN is better than the BP-NN algorithm in
convergence speed and in convergence accuracy.
The quality of the results illustrate that PSO-NN
algorithm is applicable and effective for the
identification of the hydraulic servo robot. The
control error for both examples converges fast. The
results can be improved by increasing the number of
data points used as the inputs and the outputs during
training. In the application of the optimization
method, it has also seen that, increasing the number
of swarms increase the number of error function
evaluations. PSO-NN gets less computation time and
higher training and test accuracies than BP-NN
algorithm.
Figure 7(a): The Translational axis (L
2
).
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0204060
Number Of Inputs
Joint1 Response(ra
d
Reference
BP
PSO - NN
Figure 7(b): The Rotational axis (θ
2
).
0
0,2
0,4
0,6
0,8
1
1,2
0 20406080100120
Number of inputs
Joi nt2 Response (m)
Reference
BP
PSO-NN
Figure 8(a): The Translational Axis (L
2
).
0
0,2
0,4
0,6
0,8
1
1,2
0 20406080100120
Number of inputs
Joi nt1 response (rad)
Reference
BP
PSO-NN
Figure 8(b): The Rotational Axis (θ
2
).
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 1000 2000 3000 4000 5000 6000
Number of iteration
Total error rate
BP error rate
PSO-NN error rate
Figure 9: Convergence rates of proposed Algorithms.
REFERENCES
Hong Z., Kaifang D., Tingqi L., 2002. “A Online-Trained
Neural Network Controller for Electro-hydraulic
Servo System”, Proceedings of the 4
th
World Congress
on Intelligent Control and Automation. Shanghai,
China, pp. 2983-2986.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
54

Van Den Bergh F., Engelbrecht A. P., 2000. “Cooperative
Learning in Neural Networks using Particle Swarm
Optimizers”. SACJ/SART, no 26, pp. 1-8.
Lewis F. L., 1996. “Neural Network Control of Robot
Manipulators”. IEEE Expert Special track on
“Intelligent Control”, ed. K.Passino and U. Ozguner,
pp. 64-75.
He S., Sepehri N., 1999. “Modeling and Prediction of
Hydraulic Servo Actuators with Neural Networks”.
Proceedings of the American Control Conference, San
Diego, California. pp. 3708-3712.
Abdelhameed M. M., 1999. “Adaptive Neural Network
Based Controller for Robots”. Mechatronics, vol.9, pp.
147-162.
Ghobakhloo A., Eghtesad M., 2005. “Neural Network
Solution for The Forward Kinematics Problem of A
Redundant Hydraulic Shoulder”. 32
nd
Annual
Conference of IEEE Industrial Electronics Society,
IECON2005, pp. 1999-2004.
Kennedy J., Eberhart R. C., 1995. “Particle Swarm
Optimization”. Proceedings of IEEE International
Conference on Neural Networks, Piscataway, NJ, pp.
39-43.
Zhang C., Shao H., Li Y., 2000. Particle Swarm
Optimisation for Evolving Artificial Neural Network”,
Proceedings of the IEEE International Conference on
Systems, Man. and Cybernetics 2000, pp. 2487-2490.
Liu H., Tang Y., Meng J., Ji Y., 2004. “Neural Networks
Learning Using Vbest Model Particle Swarm
Optimisation”, Proceedings of the 3
rd
International
Conference on Machine Learning and Cybernetics,
Shanghai, China. pp. 3157-3159.
Zhang J. R., Zhang J., Lok T-M., Lyu M. R., 2006. “A
Hybrid Particle Swarm Optimization-Back
Propagation Algorithm for Feedforward neural
Network Training”. Applied Mathematics and
Computation.
Das M. T., Dulger L. C., 2007. “Control of a Four Bar
Mechanism by applying particle swarm optimization”.
13
th
National Machine Theory Symposium,
UMTS2007, Sivas, Türkiye.
Narendra K. S., Parthasamathy K., 1990. ‘Identification
and Control of Dynamical Systems Using Neural
Networks’, IEEE Transactions on Neural Networks,
Vol.1, No.1, pp. 4-27.
Kapucu S., 1994. “Adaptive Control of a Robot
Manipulator by visual data”. A Ph.D. Thesis,
Gaziantep University, Mechanical Engineering
Department.
Bose N. K., Liang P., 1996. “Neural Network
Fundamentals with Graphs, Algorithms, and
Applications”. McGraw-Hill series in electrical and
computer engineering. ISBN 0-07-114064-6.
Krose B., Van der Smart P., 1996. “An Introduction to
Neural Network”, 8
th
edition.
Kirecci A., Eker İ., Dülger L. C., 2003. “Self Tuning
Control as Conventional Method”, Electrical
Engineering, 85, pp. 101-107.
Bosch Regulator Valves, 1987. Robert Bosch GmbH,
Germany, 761302-1987.
IDENTIFICATION AND CONTROL OF AN ELECTRO HYDRAULIC ROBOT PARTICLE SWARM
OPTIMIZATION-NEURAL NETWORK(PSO-NN) APPROACH
55
