
COMPREHENSIBLE MODEL OF AMPLITUDE
NONLINEARITIES IN PIEZORESISTIVE-FORCE SENSORS
L. Paredes-Madrid and P. Gonzalez de Santos
Centre for Automation and Robotics UPM-CSIC, Ctra. Campo Real Km 0,2, 28500 Arganda del Rey, Madrid, Spain
Keywords: Piezoresistive, force, Sensor, Nonlinear, Model, Tanh, Piezocapacitive, Flexiforce.
Abstract: This article upgrades the RC linear model presented for the piezoresistive-force sensors. Amplitude
nonlinearity was found in sensors conductance, and a characteristic equation was formulated for modeling
it. By using such equation, it is possible to determine sensor sensitivity for any driving voltage below 1V.
This model considerable improves the plug-and-play capability of the sensor. However, sensor conductance
is unsatisfactory modeled by such equation when the input voltage goes over 1V. We present an approach
for such driving condition.
1 INTRODUCTION
Piezoresistive force sensors have demonstrated to be
a good solution for applications demanding non-
invasive force readings (Kong et al., 2008; Monroy
et al., 2009). However, the relative low repeatability
and considerable hysteresis of such sensors,
compared to load cells (Vecchi et al., 2000), limit
their use to applications where accuracy is not as
relevant as the size of the sensor involved (Lebosse
et al., 2008).
On the other hand, load cells have demonstrated
to be a trustable-force-measurement device in many
different systems (Muller et al., 2010) demanding
high reliability and accuracy, i.e., force control
applications (Sijs et al., 2008) and rehabilitation
(Goto et al., 2005). There are several reasons,
besides high repeatability, for using load cells: they
are available in different sizes and force ranges, they
can perform force readings in multiple axes and can
withstand overload forces without suffering
damages. Dynamic response of load cells is also
exceptional, while exhibiting negligible time drift.
The main disadvantages of load cells are based in
their large bulk and heavy weight, requiring that
when a new robot or force control system is under
design, load-cell bulk and weight must be taken into
account from the early stages of design, since load-
cell mass is usually comparable with the system
mass where it is used.
In certain research fields as biomechanics,
biomedical engineering and haptics, it is necessary
to perform non-invasive force readings which are
not possible to carry out by using the
abovementioned-bulky load cells. Whether if it is
necessary to measure contact force on a knee joint
(Sawaguchi et al., 2009), or measure grasp force of a
human hand (Castro & Cliquet Jr, 2002), within
many other applications (Kazerooni et al., 2005;
Ahroni et al., 1998), a low profile, light-weight
sensor must be used in order to meet the limited
space requirements of the task. Piezoresistive force
sensors are the best solution since they can be fitted
in many applications without requiring substantial
changes in the mechanical layout. However, as
mentioned previously, they lack of good
repeatability and exhibit considerable hysteresis
compared to load cells. We are interested in
improving piezoresistive-sensors performance with
the aim of using them in tele-operation devices
specially those devoted to remote handling activities
for the maintenance and repair of nuclear fusion
installations (Ibarra et al., 2010)
Previous works (Paredes-Madrid, Torruella et al.,
2010; Paredes-Madrid, Emmi et al., 2010) have
demonstrated that the repeatability of piezoresistive
force sensor may be increased by performing
capacitance readings under AC sourcing. The
method detailed in (Paredes-Madrid, Torruella et al.,
2010) consists in reading sensor’s conductance and
capacitance by applying DC and sine waveforms,
thereby; it is possible to perform a multivariable
estimation of force which dramatically reduces force
estimation errors.
In (Paredes-Madrid, Emmi et al., 2010), a RC-
parallel-electrical model was identified for the
405
Paredes-Madrid L. and Gonzalez de Santos P..
COMPREHENSIBLE MODEL OF AMPLITUDE NONLINEARITIES IN PIEZORESISTIVE-FORCE SENSORS.
DOI: 10.5220/0003453604050410
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 405-410
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Piezoresistive Force Sensor (PFS) model
FlexiForce® A201-100, also, the sensor exhibited a
nonlinear response when the frequency of the
driving signal went over a determined limit
conveniently named as the divergent frequency.
However, we have recently found that the sensor
exhibits additional nonlinearities related with the
amplitude of the driving signal, and thus the RC
model and the corresponding equations must be
adjusted to embrace the newly-found-amplitude
nonlinearity.
This paper reviews the RC model for the A201-
100 force sensor which will be referred from now on
as PFS. This device was chosen for the study
because the manufacturer has developed many
specific sensor for research (Culjat et al., 2008),
medical (R. A. Lee et al., 2009) industrial and
service tasks (Tekscan, 2011), but the results here
reported are extendable to other similar devices.
Later, amplitude nonlinearity is identified in the
sensor and an equation is deducted from
experimental data. The feasibility of such equation
for modeling sensor conductance is fully tested and
demonstrated for driving voltages below 1V.
However, it is shown later that the model becomes
unsuitable when the sourcing voltage goes over 1V,
and so, it is presented an approach for modeling
sensor conductance under such driving condition.
2 REVIEW OF THE RC MODEL
FOR THE PFS
Previously, the PFS from Fig. 1a was characterized
in terms of frequency and transient response to
input-sine waves and square waves, respectively.
Test results yielded to a RC-parallel-electrical model
(see Fig. 1b) for the PFS and consequently a set of
equations were presented to model its behavior;
however, when the frequency of the driving signal
went over a determined value, conveniently named
as the divergent point, sensor resistance started to
drop as frequency was increased, and the RC model
became no longer valid.
a b c
Figure 1: Piezoresistive sensor under study. (a) Picture of
the PFS (b) Electrical model of the PFS. (c) Conditioning
circuit for measuring forces in the PFS.
This behavior splits sensor response in two
differentiated regions: one linear region, when
operating below the divergence frequency, where we
can model and predict sensor response in terms of
phase shift and output amplitude according to the
RC theoretical equations, and a nonlinear region,
when operating over the divergent frequency, where
phase shift and output amplitude become
unpredictable.
The typical driving circuit for the PFS is depicted
in Fig. 1c. When the sine wave, V
s2
, is selected as
input; the following set of equations taken from
(Paredes-Madrid, Torruella et al., 2010) describes
sensor response within its linear region of operation.
First, a differential equation can be deduced from
the circuit depicted in Fig. 1c with V
s2
as input:
22
s
so
s
s
g
VdVV
C
R
dt R
+=−
(1)
where R
s
and C
s
are sensor Resistance and
Capacitance respectively from the model in Fig.1b,
R
g
is the feedback resistor in the driving circuit of
Fig. 1c with V
o
as the output voltage. Given the
input:
(
)
2
sin 2
sS
VA ft
π
=
(2)
The output voltage, V
o
, can be expressed as:
(
)
()
sin 2
-2cos2
osg s
s
ft
VAR fC ft
R
π
ππ
=+
⎛⎞
⎜⎟
⎝⎠
(3)
Second, equation (3) may be rewritten in terms
of phase shift, θ, and output amplitude, A
o
, as below:
(
)
sin 2
oo
VA ft
π
θ
=+
(4)
At last, joining (3) and (4) result in:
cos( )
gs
s
o
RA
R
A
θ
=
(5)
()
2
o
s
gs
Asin
C
R
Af
θ
π
=
(6)
Equation (6) was previously used in (Paredes-
Madrid, Torruella et al., 2010) to measure
capacitance changes as force increases. This yielded
to demonstrate that the PFS exhibits a
piezocapacitive property which is useful for
reducing force estimation errors.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
406
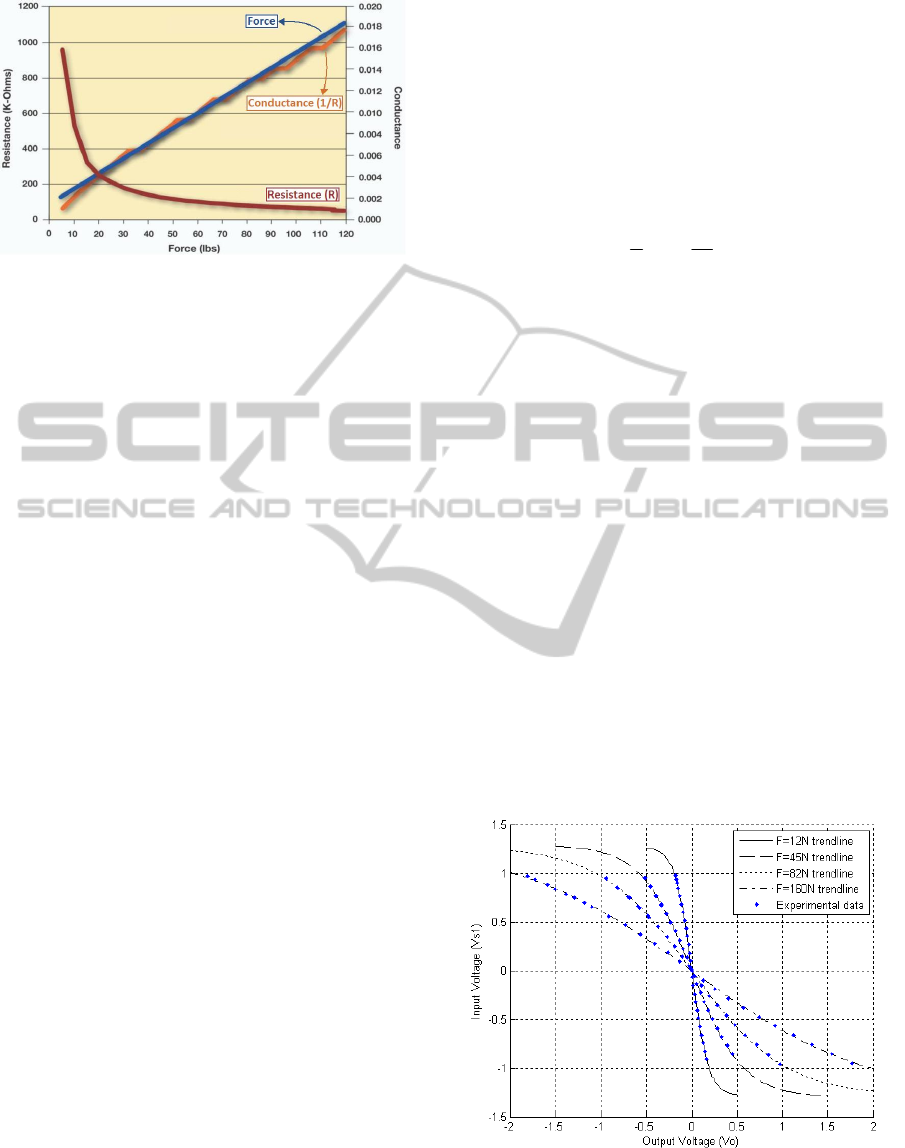
Figure 2: Typical variation of resistance and conductance
for an A201-100 FlexiForce® Sensor, image taken from
(Tekscan, 2009a). The image legend was modified for
better comprehension.
3 AMPLITUDE NONLINEARITY
OF THE PFS UNDER DC
SOURCING
Besides the already identified frequency
nonlinearity, the PFS exhibits amplitude
nonlinearity. Initially, we only study such
nonlinearity for input voltages within the range
(-1V, 1V), and then we present an approach for
higher input voltages. The analysis of amplitude
nonlinearity must be split in two because the sensor
exhibits quasi-different responses depending on the
input voltage applied.
3.1 Modelling Amplitude Nonlinearity
for Input Voltages below 1V
If we choose the DC source, V
s1
, as the input of the
driving circuit in Fig. 1c we obtain a DC output
voltage, V
o
, which changes linearly, see Fig. 2
(Tekscan Inc, 2009a) , as the applied force on the
sensor increases. This response has been thorough
described by sensor manufacturer (Tekscan Inc,
2009b) and in many research articles (Lebosse et al.,
2008; Vecchi et al., 2000); this behavior corresponds
to the piezoresistive property of the sensor.
However, to our knowledge, there is not information
available about how the output voltage changes, for
a fixed force, when the DC voltage is varied.
In order to study such behavior, we swept the
input voltage, V
s1
, starting at -1V up to 1V and plot
de output voltage, V
o
, while keeping constant the
applied force. In practice, the voltage sweep was
made by sourcing the sensor with a low frequency
triangle signal of 0.4Hz with peak amplitude of 1V
and no offset. The frequency must be kept as low as
possible in order to avoid phase-lag effects due to
the built-in-sensor capacitance. Forces within the
range from 0N to 250N were applied to one PFS
device while the output voltage, V
o
was recorded.
Figure 3 shows the output voltage for randomly
chosen forces of 12N, 45N, 82N and 160N. We have
found that the best function that relates the input
voltage, V
s1
, to the corresponding sensor response,
V
o
, is:
1
1
atanh( )
s
o
V
V
qk
=−
(7)
where k and q are constants. However, it is not
convenient to fit k and q in the form presented in (7)
because it may yield to complex values in V
o
, since
the atanh domain is restricted to (-1, 1). Thus, it is
better, for fitting purposes, to rewrite (7) in terms of
the tanh function as below:
1
tanh( )
so
Vk qV=−
(8)
The minus sign in (7) and (8) comes from the
negative gain in the inverting amplifier (see Fig. 1c)
which is used to drive the sensor. The axes in Fig. 3
are intentionally switched to represent: V
o
in the x-
axis and V
s1
in the y-axis with the aim of fitting the
data points with (8) instead of with (7). The fitting
process is highly confident with a coefficient of
determination, R
2
, of at least R
2
=0.9992 for every
applied force and an average value of R
2
=0.9995.
Parameters k and q were set to adjust
independently for every applied force; however, the
independent fitting processes returned values of k
almost constant regardless of the exerted force, F,
Figure 3: V
s1
vs. V
o
for the PFS for driving voltages below
1V and four different-exerted forces of 12N, 45N, 82N
and 160N. The trendline used for each individual fit was a
hyperbolic tangent function (8).
COMPREHENSIBLE MODEL OF AMPLITUDE NONLINEARITIES IN PIEZORESISTIVE-FORCE SENSORS
407

whereas q has shown to be hyperbolically dependant
on the exerted force; in other words, 1/q is a linear
function of F. Figure 4 show the variation of k and
1/q for different applied forces within the range from
0N to 250N resulting from independent-fitting
processes.
Several facts may be taken out from Fig. 3 and
Fig. 4 but first, it is necessary to relate (8) with F in
order to get a whole view of sensor behavior. For
such purpose, we must remember that the sensor
exhibits a piezoresistive behavior and thus its
conductance, 1/R
s
, may be modeled in terms of the
applied force, F, as:
1/
s
R
mF b=+
(9)
Equation (9) is not explicitly stated in the PFS
datasheet (Tekscan Inc, 2009b); however, the sensor
manufacturer declares that a linear interpolation
between the conductance values and the applied
forces can be done. Also, by looking at the
conductance curve in Fig. 2, it can be easily
deducted that (9) is a valid fit for 1/R
s
. Considering
the inverting-amplifier, with feedback resistor R
g
,
which is used to drive the PFS, it is possible to link
(9) with the amplifier characteristic equation:
1
g
o
s
s
R
V
VR
=−
(10)
to obtain:
()
1
o
g
s
V
R
mF b
V
=− +
(11)
We must clarify that (11) is not explicitly stated
in the PFS datasheet (Tekscan Inc, 2009b). Only
(10) is stated in (Tekscan Inc, 2009b), but the
manufacturer suggests that sensor sensitivity, m, can
be changed by either replacing the feedback resistor,
R
g
, or by changing the driving voltage, V
s1
.
According to (11) we may think that changes in
V
s1
produce direct-proportional changes in sensor
sensitivity, however experimental results plotted in
Fig. 3 yield to different conclusions because the
trendline used to fit the experimental data points is
not a line.
With the aim of demonstrating that (11) is an
approximate expression for fitting the data points
from Fig. 3, we take the 1/q curve from Fig. 4 and
represent it, as linearly dependent on the applied
force.
1/ qmFb
′′
=+
(12)
The 1/q curve is analogous to the conductance
curve of Fig. 2. From now on, we refer to m’ and b’
Figure 4: Graph representing the variation of sensor
parameters
k and q for different exerted forces within the
range from 0N to 250N.
as the generalized-sensor parameters, because we
demonstrate in the next section that they can predict
sensor sensitivity for any input voltage within the
range (-1V, 1V). Equation (12) can be substituted
into (7) yielding to:
()
1
atanh
s
o
V
VmFb
k
′′
=− +
⎛⎞
⎜⎟
⎝⎠
(13)
Nevertheless, we can not state (13) in the same
way as (11) because the input voltage, V
s1
, is part of
the atanh argument, but if we take only the first term
of the atanh-taylor series we yield to the following
approximate expression:
()
1
1
o
s
V
mF b
Vk
−
′
′
=+
(14)
Equation (14) is a non-exact expression of sensor
response since it can not model amplitude
nonlinearity, likewise (11) is too. The 1/k factor, in
(14), is analogous to R
g
in (11), in the same way that
m is analogous to m’, b to b’ and 1/R
s
to 1/q. In fact,
(11) is valid if, and only if, the input voltage remains
constant during the measurement process; this
condition matches for the recommended driving
conditions by the manufacturer (Tekscan Inc,
2009b). In case V
s1
is changed during the
measurement process, it is necessary to recalculate
the new values of m and b in order to estimate the
applied force via (11). But, since neither (11) nor
(14) account for the amplitude nonlinearity of the
PFS, the new values of m and b would be erroneous.
Instead, it is necessary to use the exact expression
(13) to correctly estimate the new sensor parameters
resulting from the new input voltage.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
408
3.2 Effect of Feedback Resistor in
Sensor Response
The effect of feedback resistor R
g
in the driving
circuit of Fig. 1c and consequently in (13) can be
deducted if we notice that R
g
only changes the
feedback gain of the amplifier without affecting
sensor current, thus, changing R
g
will produce
direct-proportional changes in the output voltage as
below:
()
1
atanh
g
s
o
ref
R
V
VmFb
R
k
′′
=− +
⎛⎞
⎛⎞
⎜⎟
⎜⎟
⎝⎠
⎝⎠
(15)
where R
ref
is the feedback resistor used during the
characterization to obtain the values of m’, b’ and k.
In case the feedback resistor is changed after the
characterization process, the output voltage is
multiplied by the ratio R
g
/R
ref
where R
g
is the new
feedback resistor. Replacing the feedback resistor
produces a direct-proportional change in the output
voltage because the amplifier is inherently linear,
whereas sensor resistance is not. In fact, by linking
(7), (10) and (12), we get an expression which shows
the non-linear behavior of sensor conductance to
changes in the input voltage.
()
()
1
1
atanh /
1
s
ssg
Vk
mF b
RVR
′′
=+
(16)
However, note from (16) that sensor
conductance is always linear to force changes as the
manufacturer states (Tekscan Inc, 2009b) and the
Fig. 2 shows.
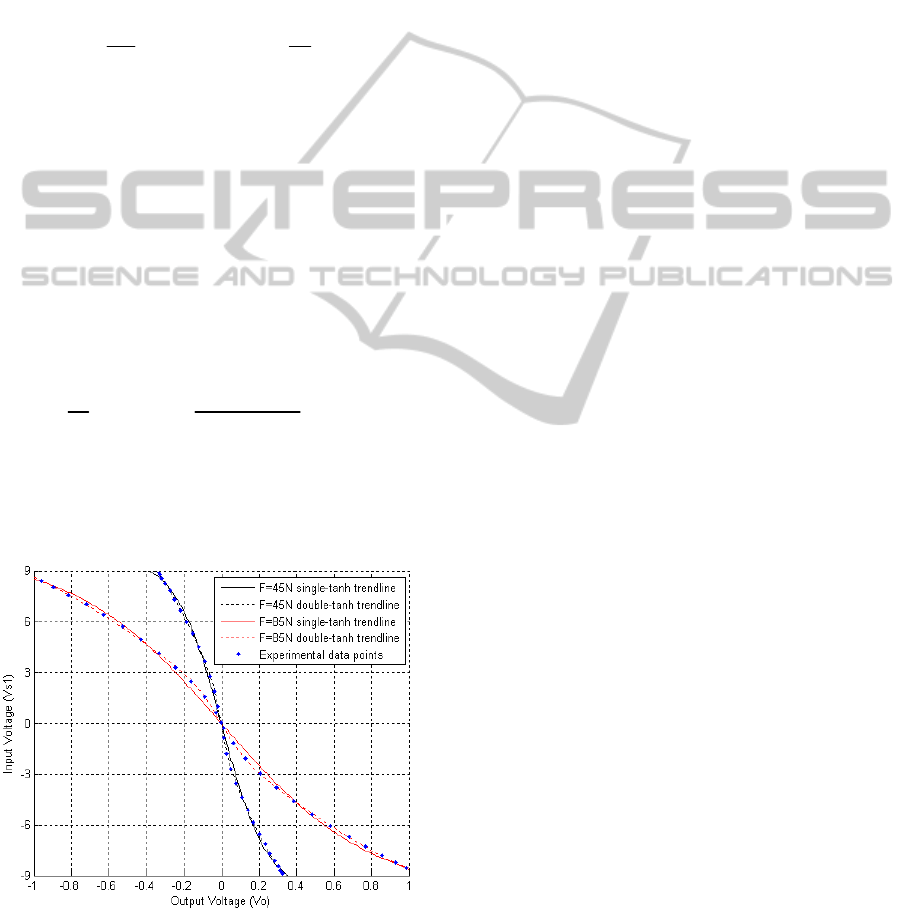
Figure 5: Graph representing the relation of V
s1
vs. V
o
for
input amplitudes over 1V and forces of 45N and 85N.
Two different trendlines are shown, single (8) and double
tanh (17).
Equation (15) is the final expression we propose
for modeling sensor conductance because it accounts
for changes in V
s1
, as well as to changes in the
feedback resistor R
g
. By using (15) it is possible to
estimate sensor sensitivity under any driving
voltages below 1V, or derive an appropriate set of
driving conditions (V
s1
and R
g
) to obtain a target
sensitivity in the system.
3.3 An Approach to Modeling the
Amplitude Nonlinearity for Input
Voltages over 1V
In order to study the amplitude nonlinearity for input
amplitudes over 1V, it was followed the same
procedure described in section 3.1, but now V
s1
was
restricted to a broader range (-9V, 9V). Figure 5
shows the output and input voltages for such
condition, but only the responses for two different
forces of 45N and 85N are shown for better
comprehension.
Initially, the experimental data points were fit in
the same way as in section 3.1; this implies using (8)
as trendline, but the coefficient of determination did
not result as good as before. We propose, as an
initial approach, the following curve as a general fit
for the data points resulting from V
s1
over 1V:
11 1 2 2
tanh( ) tanh( )
so o
Vk qVk qV=−+−
(17)
Trendlines resulting from (8) and (17) are both
shown in Fig. 5 for comparison purposes. Note that
the data points are pretty close to either trendline,
single (8) or double-tanh (17), but it is clear that (17)
is a better fit specially for the data points which
satisfy the condition |V
s1
|<3V. However, in order to
use (17) as a valid model, it is necessary a more
detailed study with the aim of understanding how
the coefficients k
1
, k
2
, q
1
and q
2
change with every
exerted force.
The main problem of proposing (17) as a valid fit
for the sensor is based in the large number of
coefficients to find and thus the multiple solutions
available. We have observed that k
2
remains more or
less constant around 1V, whereas k
1
increases with
the applied force. But a consistent variation of q
1
and q
2
has not been found yet.
4 CONCLUSIONS
A comprehensive model for the conductance of
piezoresistive-force sensors has been developed and
tested for input voltages below 1V.
COMPREHENSIBLE MODEL OF AMPLITUDE NONLINEARITIES IN PIEZORESISTIVE-FORCE SENSORS
409

A nonlinear response was identified in sensor
conductance corresponding to a hyperbolic tangent
function. For voltages over 1V, an approximate
model for sensor conductance has been presented
but additional tests are required for refining and
simplifying it.
ACKNOWLEDGEMENTS
This work has been supported by Madrid
Community through the project TECHNOFUSION
(S2009/ENE-1679).
REFERENCES
Ahroni, J.H., Boyko, E. J., Forsberg, R., 1998. Reliability
of F-scan in-shoe measurements of plantar pressure.
Foot & ankle international/American Orthopaedic
Foot and Ankle Society [and] Swiss Foot and Ankle
Society, 19(10), 668.
Castro, M. C., Cliquet Jr, A., 2002. A low-cost
instrumented glove for monitoring forces during
object manipulation. Rehabilitation Engineering,
IEEE Transactions on, 5(2), pp. 140–147.
Culjat, M. O., King, C. H., Franco, M. L., Lewis, C. E.,
Bisley, J. W., et al., 2008. A tactile feedback system
for robotic surgery. En Engineering in Medicine and
Biology Society, 2008. EMBS 2008. 30th Annual
International Conference of the IEEE. pp. 1930–1934.
Goto, E., Ohnishi, K., Miyagawa, H., Saito, Y., 2005.
Field test of a force control rehabilitation system for
quantitative evaluation of the disorder in the upper
extremities. En Rehabilitation Robotics, 2005. ICORR
2005. 9th International Conference on. pp. 82–85.
Ibarra, A., Perlado, M., Aracil, R., Blanco, D., Ferre, M.,
et al., 2010. TechnoFusión, a relevant facility for
fusion technologies: The remote handling area. Fusion
Engineering and Design.
Kazerooni, H., Fairbanks, D., Chen, A., Shin, G., 2005.
The magic glove. En Robotics and Automation, 2004.
Proceedings. ICRA'04. 2004 IEEE International
Conference on. pp. 757–763.
Kong, Y. K., Lowe, B. D., Lee, S. J., Krieg, E. F., 2008.
Evaluation of handle shapes for screwdriving. Applied
Ergonomics, 39(2), pp. 191–198.
Lebosse, C., Bayle, B., de Mathelin, M., Renaud, P., 2008.
Nonlinear modeling of low cost force sensors. En
Robotics and Automation, 2008. ICRA 2008. IEEE
International Conference on. pp. 3437–3442.
Lee, R. A., van Zundert, A. A., Maassen, R. L., Willems,
R.J., Beeke, L.P., et al., 2009. Forces applied to the
maxillary incisors during video-assisted intubation.
Anesthesia & Analgesia, 108(1), 187.
Monroy, M., Ferre, M., Barrio, J., Eslava, V., Galiana, I.,
2009. Sensorized thimble for haptics applications. In
Mechatronics, 2009. ICM 2009. IEEE International
Conference on. pp. 1–6.
Muller, I., de Brito, R., Pereira, C., Brusamarello, V.,
2010. Load cells in force sensing analysis–theory and
a novel application. Instrumentation & Measurement
Magazine, IEEE, 13(1), pp. 15–19.
Paredes-Madrid, L., Emmi, L., de Santos, P., 2010.
Improving the performance of piezoresistive force
sensors by modeling sensor capacitance. En Industrial
Electronics (ISIE), 2010 IEEE International
Symposium on. Industrial Electronics (ISIE), 2010
IEEE International Symposium on. pp. 458-463.
Paredes-Madrid, L., Torruella, P., Solaeche, P., Galiana,
I., Gonzalez de Santos, P., 2010. Accurate modeling of
low-cost piezoresistive force sensors for haptic
interfaces. In Robotics and Automation (ICRA), 2010
IEEE International Conference on. pp. 1828–1833.
Sawaguchi, N., Majima, T., Ishigaki, T., Mori, N.,
Terashima, T., et al., 2009. Mobile-Bearing Total
Knee Arthroplasty Improves Patellar Tracking and
Patellofemoral Contact Stress: In Vivo Measurements
in the Same Patients. The Journal of Arthroplasty.
Sijs, J., Liefhebber, F., Romer, G.W., 2008. Combined
Position & Force Control for a robotic manipulator. En
Rehabilitation Robotics, 2007. ICORR 2007. IEEE
10th International Conference on. pp. 106–111.
Tekscan Inc, 2011. Automotive Door Mounting. Available
at: http://www.tekscan.com/automotive-door-
mounting-pressure [February 2011].
Tekscan Inc, 2009a. E-book: Force Sensors for Design.
Available at: http://www.tekscan.com/flexiforce/force-
sensors-for-design [February 2009].
Tekscan Inc, 2009b. FlexiForce®: Single Button FSR.
Available at: http://www.tekscan.com/pdf/FlexiForce-
Sensors-Manual.pdf [February 2009].
Vecchi, F., Freschi, C., Micera, S., Sabatini, A. M., Dario,
P., et al., 2000. Experimental evaluation of two
commercial force sensors for applications in
biomechanics and motor control. In 5th Ann. Conf. of
Int. FES.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
410
