
TOWARDS A FLEXIBLE TRANSPORTATION IN DISTRIBUTION
CENTERS
Low-level Motion Control Approach
Sisdarmanto Adinandra, Dragan Kosti´c, Jurjen Caarls and Henk Nijmeijer
Dept. of Mechanical Engineering, Eindhoven University of Technology, PO Box 513 5600MB, Eindhoven, The Netherlands
Keywords:
Low-level motion control, Unicycle mobile robots, Collision avoidance, Priority rules, Distribution center.
Abstract:
In recent years autonomous mobile robots (AMR) have emerged as a means of transportation in distribution
centers. The complexity of transportation tasks requires efficient high-level control planning and task schedul-
ing, as well as low-level motion control of the robots such that a more flexible, and robust transport system
can be achieved. In this work we present a methodology to achieve coordination of a group of mobile robots
so that the objectives are met, focusing on low-level control approach. We use a reactive-to-dynamic-change
control concept. We consider an automated distribution center in a simulation case study. The transportation is
evaluated in terms of completion time and robustness to fault. In addition, the control strategies are validated
in a mock-up version of the automated distribution center.
1 INTRODUCTION
The transportation in a distribution center is typically
organized using conveyors systems. These systems
provide a good transport capacity and high availabil-
ity, but are sometimes very sensitive to conveyor fail-
ures. In the event of a conveyor breakdown, the
transport system of the distribution centers will likely
come to complete standstill. This is due to the fact
that the their relative high-cost in the warehousing
industry restrict having too much redundancy in the
transportation system. Another weakness is their
fixed maximum capacity. If the business owner of the
distribution center changes, a larger capacity and lay-
out changes may be needed. Besides having a high
performance, an ideal distribution center transporta-
tion should be robust to system failures and flexi-
ble to system changes. An autonomous mobile robot
(AMR) transport concept has these desired character-
istics (Wurman et al., 2007).
In such a concept, a large collection of AMR is re-
sponsible for transportation of goods in the distribu-
tion center. As the system has a large transport redun-
dancy, the breakdown of a single robot may lower the
system’s performance, but will not lead to a complete
system standstill. Flexibility can easily be achieved
by varying the number of robots in the system so that
the AMR is capable of handlingvariationsin transport
demands. However, to meet the requirements there
are needs for advanced control of individual robots as
well as inter-robots coordination.
In transportation system, planning, scheduling,
and control of tasks of the conveyors or robots are
done by a high-level control system. In a centralized
way, e.g. see (Gu et al., 2010) or decentralized way,
e.g see (Weyns et al., 2005), the high-level control
system allocates the tasks to the robots based on cus-
tomer orders and resource availability.
Recent developments in formation and coordina-
tion control of mobile robots by low-level motion
controllersshow promising results to realize the trans-
portation. In some techniques, e.g. leader-follower
and virtual structure, the motion controller achieves
tracking of individual robot trajectories and maintains
the desired spatial formation between the robots. See
for instances (Arai et al., 2002), (Chen and Wang,
2005), (Liu et al., 2010), and (Kosti´c et al., 2010) for
reviews and recent developmentsaround the low-level
motion coordination.
Some researches are devoted to performance anal-
ysis of different high-level strategies, see e.g. (Vis,
2004), (Le-Anh and Koster, 2006), (Gu et al., 2010),
and references therein. These articles discuss the
trends in high-level control of distribution centers and
propose different options to find the optimal through-
put. It is to be pointed out that high-level control as-
sumes known operating conditions in the distribution
centers. If the system dynamics change rapidly, high-
155
Adinandra S., Kostic D., Caarls J. and Nijmeijer H..
TOWARDS A FLEXIBLE TRANSPORTATION IN DISTRIBUTION CENTERS - Low-level Motion Control Approach.
DOI: 10.5220/0003519801550160
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 155-160
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
level control may fail in handling the system behav-
ior. This opens possibilities for more reactive and less
predictive control strategies.
As for the low-level motion controller, coordina-
tion controllers of mobile robots have been success-
fully simulated and validated in experiments. The ap-
plications are widely spread from cooperative clean-
ing (Jager and Nebel, 2002) to exploration (Burgard
et al., 2005). The ability to quickly react to dynamic
changes increases the robustness of the system as well
as speed of conducting the required tasks. However,
as indicated in (Arai et al., 2002) or (Buccieri et al.,
2009), there are needs to scale-up the demonstration,
and to demonstrate the advantages of cooperative mo-
bile robots in more complex tasks. Moreover, there is
a little information on how the coordination control of
AMR is applied in a distribution center.
In (Adinandra et al., 2010), it is investigated how a
group of AMR can execute one typical task in a distri-
bution center, i.e. transporting items from start to end
positions in a certain formation while avoiding colli-
sion. The performance of a high- and low-level co-
ordination control are analyzed. It is concluded that
the high-level has better throughput but is less robust
compared to the low-level control. However, further
generalization to more realistic transport tasks with a
larger number of AMR is needed.
There are two drivers for our research: (i) the
high-level control opens possibility for less predic-
tive and more reactive-to-dynamic-changes solutions,
and (i) the lack of information on how low-level con-
trol manage a group of AMR in a distribution center.
We conduct research on how flexible and robust trans-
portation in a distribution center can be achieved us-
ing a group of AMR, focusing on low-level motion
control approach. Compared to the work in (Adi-
nandra et al., 2010), we investigate the transportation
in a more realistic simulation case study and using
more robots. We consider replacing part of the con-
veyor system of an automated distribution center with
AMR. We analyze the performance of the transport
system using relevant indicators, i.e. time to complete
tasks and robustness. To validate the control strate-
gies, we conduct experiments on a smaller scale of
the automated distribution center
The main contributions of this paper are: (i) pre-
sentation of a methodology to organize a group of
AMR in a distribution center, (ii) exploitation of low-
level motion controller for a group of AMR to achieve
flexible, and robust transportation, (iii) simulation and
experimental validation of the control strategies in an
automated distribution center.
The paper is organized as follows. In Section 2 we
describe our control architecture, the kinematic model
of the mobile robot and its trajectory controller, as
well as the performance indicators used in this work.
Section 3 explains in details the low-level control
strategies. Section 4 highlights the automated distri-
bution center used in the case study. Section 5 reports
the simulation and experimental results and highlights
the main finding of this work. Conclusions and out-
look work are given in Section 6.
2 PRELIMINARIES
2.1 Control Architecture
As stated in references, control design and task plan-
ning in a distribution center are complex and diffi-
cult tasks, see e.g. (Gu et al., 2010). Narrowing the
problem to the transportation only does not reduce
the complexity. In some research, e.g. (Lacomme
et al., 2010), one tries to combine the problem of task
scheduling and robots dispatching in one optimization
problem. On the other hand, we can also keep the
problem of task scheduling and dispatching solved as
separate design problems.
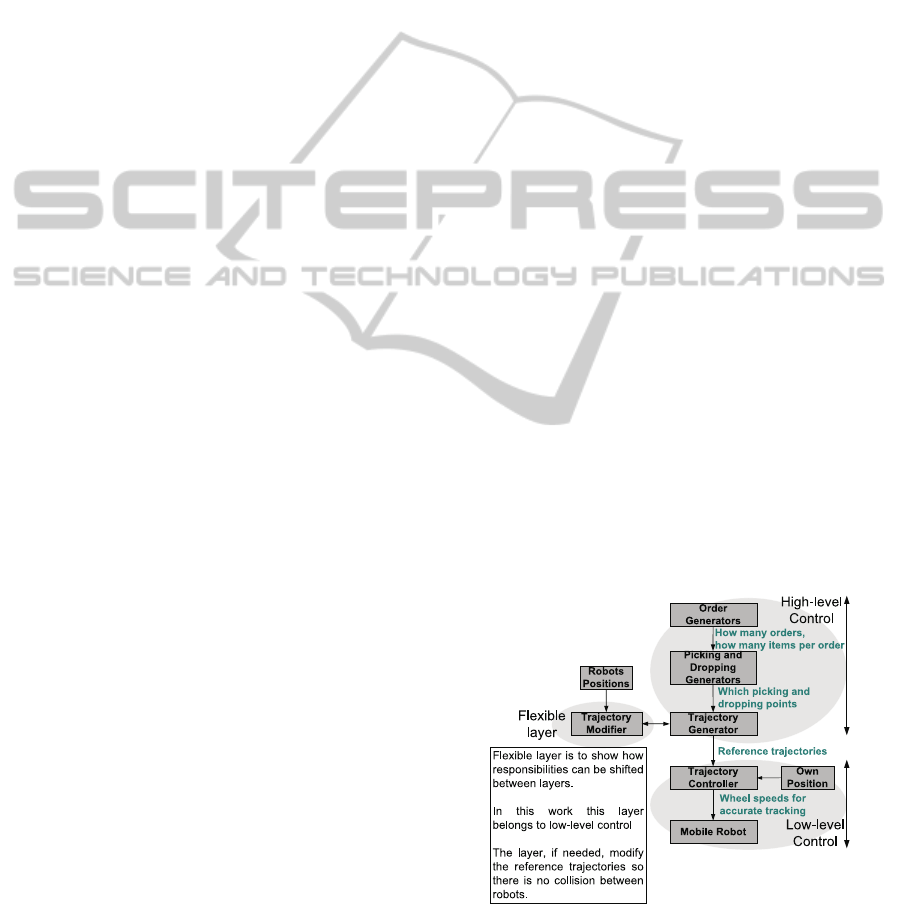
In this work we choose to use the separation ap-
proach. We decompose the complexity of the task
into different control layers as shown in Figure 1. The
control layers give us convenience of having the con-
trol design isolated from the rest of the system and the
possibility to test different control algorithms. These
layers also allow shifting responsibilities in a given
transportation task. The main differences with re-
spect to typical control architectures for transport us-
ing conveyorsare the addition of trajectory generators
and controllers.
Figure 1: The proposed control architecture.
2.2 Unicycle Mobile Robots
There are various types of AMR. Some of them
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
156

belong to class of AMR with non-holonomic con-
straints. In practice, this constraint implies that no
sideways movement is allowed. Throughout this
work, we consider a group of m-AMR that are de-
scribed by the non-holonomic kinematic model of a
unicycle mobile robot (see e.g. (Kanayama et al.,
1990) and references therein):
˙x
i
˙y
i
˙
θ
i
=
v
i
cosθ
i
v
i
sinθ
i
ω
i
. (1)
Here, v
i
and ω
i
are the forward and steering veloc-
ities respectively to control the AMR, x
i
and y
i
are
the Cartesian coordinates of the robot midpoint in
the world coordinate frame, θ
i
is the heading an-
gle relative to the x-axis of the world frame, and
i ∈ {1,2,3,...,m}.
2.3 Trajectory Tracking
In the most existing AMR-like systems the robots fol-
low fixed lines, thus only controlling v
i
. The problem
is to find paths that result in the optimal throughput,
see e.g. (Lacomme et al., 2010). This approach is
simple, but cannot easily accommodate changes in
transportation demands. Thus, we propose to use a
trajectory tracking controller. The idea is as follows.
The high-level control provides the reference tra-
jectory to each robot p
ri
= [x
ri
y
ri
θ
ri
]
T
. Trajecto-
ries must fulfil the non-holonomic constraints, i.e.
− ˙x
ri
sinθ
ri
+ ˙y
ri
cosθ
ri
= 0. The low-level control is
responsible for accurate tracking of these reference
trajectories. In this work we use the following con-
troller (Jiang and Nijmeijer, 1997):
v
i
= v
ri
cosθ
ei
+ k
xi
x
ei
, (2a)
w
i
= w
ri
+ k
yi
v
ri
y
ei
sinθ
ei
θ
ei
+ k
θi
θ
ei
, (2b)
where v
ri
and ω
ri
are the reference forward and steer-
ing velocities respectively, x
ei
, y
ei
, and θ
ei
are the
tracking errors represented in robot local coordinate
frame, and k
xi
,k
yi
,k
θi
∈ R
+
are control gains.
2.3.1 Performance Indicators
We use the following indicators to evaluate the per-
formance of the proposed transportation system:
• Completion time, t
complete
, which is the time
needed to accomplish all transportation tasks and
is expressed as:
t
complete
= t
last,task
− t
first,task
, (3)
where t
first,task
and t
last,task
are the times for starting
the first and completing the last task respectively.
• Robustness. We define robustness as the ability to
cope with exceptional situation, i.e. if uncertain-
ties and faults occur, and is quantified as follow:
ρ
ob
=
t
complete,exceptional
− t
complete,normal
t
complete,normal
. (4)
3 LOW-LEVEL CONTROL
As shown in Figure 1, the low-level control is mainly
responsibilities of the trajectory controller given in
(2). Since in this work we put the flexible layer into
low-level control, we implement collision avoidance
algorithms in the low-level control.
3.1 Assumptions on High-level Control
Since low-level control needs information from the
high-level control, the following assumptions are
used: (i) the high-level control provides the complete
orders, their allocations to the AMR, as well as the
robots’ dispatching rules; (ii) the high-level control
does not provide collision-free reference trajectories.
3.2 Slow-down using Penalty Function
Consider a situation where two robots almost collide
as shown in Figure 2(a).
av
i
av
ij
f
g
i
j
av
j
a) b)
Figure 2: a) Situation in which robot j stops. Robot i has to
modify its path to avoid collision; b) Situation with 4 robots
at two junctions.
In this example robot j stops to pick items. Robot
i has to slow down or alter its path to avoid collision.
In our case study we choose to slow down using a
set P
γ
of continuous, monotone, and bounded penalty
function concept (Kosti´c et al., 2009). An example of
a function in P
γ
is
δ
γ
(x) =
0, x < γ
min
1
γ
x−
γsin(2πx/γ)
2π
, γ
min
≤ x ≤ γ
max
1, x > γ
max
,
(5)
If q
i
= [x
i
y
i
θ
i
]
T
and q
i
= [x
j
y
j
θ
j
]
T
are the position
and orientation of robots i and j in Cartesian space,
TOWARDS A FLEXIBLE TRANSPORTATION IN DISTRIBUTION CENTERS - Low-level Motion Control Approach
157
we define a vector
av
ij
=
x
j
− x
i
y
j
− y
i
T
, (6)
with its magnitude, representing the distance between
the centers of robots i and j:
|av
ij
| =
q
(x
j
− x
i
)
2
+ (y
j
− y
i
)
2
. (7)
Define the projection of the direction of robot i dir
ai
=
[cosθ
i
sinθ
i
]
T
. The slowing down coefficientof robot
i with respect to robot j is expressed as:
σ
ij
=
1, if dir
ai
• av
ij
≤ 0
δ
γij
(|av
ij
|) if dir
ai
• av
ij
> 0
, (8)
where the • sign represents the dot product of two
vectors, δ
γij
(|av
ij
|) is a penalty function. The compu-
tation is repeated for all j 6= i, j ∈ {1,2,... , m} robots.
The reference forward velocity of each robot is penal-
ized as follows:
v
ri
= v
des,i
m
∏
j=1, j6=i
σ
ij
, (9)
where v
des,i
is the desired forward velocity of each
robot.
The coefficient computed in (8) indicates whether
robot j is behind or in front of robot i relative to the
direction of movement of robot i. According to ex-
pression (9), if robot i is behind j and the other robots,
then robot i will slow down to avoid collisions.
Furthermore, priority rules need to be applied if
situation shown in Figure 2(b) occurs, i.e. more
robots wait to enter the junctions. Applying only (9)
will result in deadlock, i.e. no robots move. This is
because robots that enter the junction assume they are
behind each other, i.e. σ
fg
= σ
gf
= σ
ij
= σ
ji
= 0.
Suppose we implement right-hand priority, i.e. at
the junction a robot that comes from the right side
of other robots has higher priority, σ
fg
, σ
gf
, σ
ij
, σ
ji
is adapted as follow: σ
ji
= 1,σ
ij
= 0, and σ
fg
=
0,σ
gf
= 1. Other priorities rules like low-number or
left-hand priority can also be applied.
Artificial Potential Field (APF) Concept. The col-
lision avoidance to coordinate the robots presented
above is used in a normal situation, i.e. there is no
fault in the system and all robots are operational.
To add robustness against faults, i.e. some robots
are subject to failures or unexpected obstacles block
the paths, we add collision avoidance using APF al-
gorithm presented in (Kosti´c et al., 2010). In the APF
algorithm a robot generates repulsive forces based on
other robots’ positions. In this way a robot can alter
its path and avoid collision with the failure robots.
4 AN AUTOMATED
DISTRIBUTION CENTER
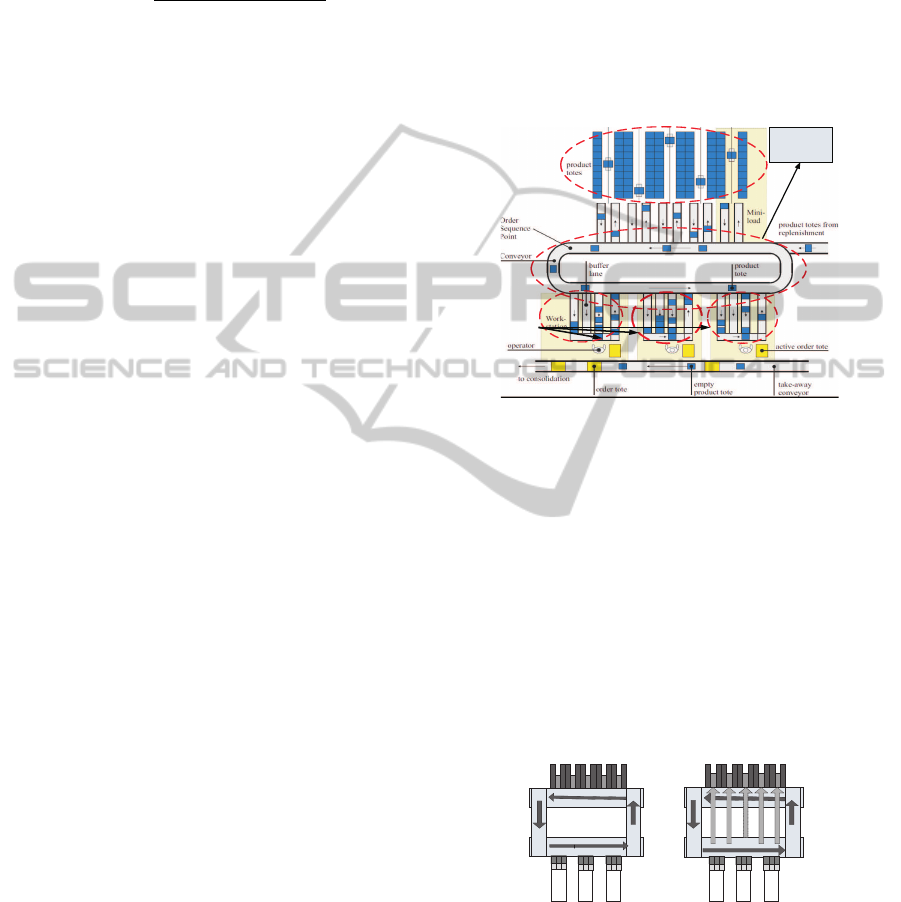
For the simulation case study, we investigate the per-
formance of the transportation system of the auto-
mated distribution center shown in Figure 3 (Andrian-
syah et al., 2010). It consists of storage, conveyorsfor
transportation, and order picking workstations. The
overall system can be classified as product-to-picker
distribution center (van den Berg, 1999).
The main
conveyor
Storage
Workstation
(WS)
Figure 3: An automated distribution center.
4.1 Using AMR to Replace Conveyors
We deploy AMR to replace the main conveyor loop,
i.e. the conveyorthat transport the items from the stor-
age to the workstation. We choose two possible paths,
i.e. the single-path that resembles the conveyor ge-
ometry and multiple-paths that allows short-cuts. We
assume that the robot: (i) has a size of 0.8 m × 0.8
m, (ii) has nominal speed of 1 m/s, (iii) in each task
carries a product tote with one type of sku/item. For
comparison basis we use maximum conveyor capac-
ity, i.e. 1000 totes/hour.
Storage
WS3
single-path
multiple-paths
WS2
WS1
WS3
WS2
WS1
Storage
Figure 4: The geometric path options for the robots.
5 RESULTS AND DISCUSSION
Scenarios. We consider different scenarios, i.e.
different number of robots (n
robots
), priority rules,
and fault status. We choose n
robots
∈ { 2,4,...,20}.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
158

The following abbreviations are used: SP: single-
path; MP-LN: multiple-paths, low number priority;
MP-LH: multiple-paths, left-hand priority; MP-RH:
multiple-paths, right-hand priority. The conveyor ca-
pacity is identified by CS.
5.1 Results and Analysis
Figure 5 shows how the low-level control performs
in different scenarios. We can observe that the AMR
concept, under the assumptions, can have similar,
even better performance as the conveyor systems.
By simulation, we can choose which combination of
n
robots
and priority rule that give us the desired perfor-
mance. The low-level control works with any num-
ber of AMR, i.e. we can easily add/remove robot to
increase/decrease the throughput. In this particular
case, the scenario SP with 16 robots give us the op-
timal throughput. Although adding more robots can
increase the capacity, if the space is kept constant, this
also means less space for movement. This results in
worse throughput or a deadlock if robots occupies all
spaces.
2 4 6 8 10 12 14 16 18 20
5
10
15
20
25
30
35
40
45
Number of Robots [−]
t
complete
[hour]
CS
SP
MP−LN
MP−LH
MP−RH
Figure 5: t
complete
in different scenarios.
Furthermore, Figure 6 show how robustness
against failures can be achieved using the APF con-
cept. In this example scenarios SP and MP-LH are
investigated. The ability of APF to generate alter-
native paths for the non-malfunctioned robot makes
the overall transport system still operate under fail-
ures, although with lower throughput. This means
that robustness against failure is achieved. This phe-
nomenon can be observed by the shifting of the orig-
inal solid-curves to the dashed-curves in Figure 6. In
each scenario the mean value of ρ
ob
is 0.1066 and
0.1068 respectively.
Experimental Results. We conduct experiments us-
ing similar set-up to the one in (Adinandra et al.,
2010). We use similar distribution center layout as
in simulation but on a smaller scale.
In overallthe low-level control works well in prac-
2 4 6 8 10 12 14 16 18 20
5
10
15
20
25
30
35
40
Number of Robots [−]
t
complete
[hour]
CS
SP
SP, but with faults
MP−LH
MP−LH, but with faults
Figure 6: t
complete
of two scenarios in normal and fault
modes. In fault case two robots stops working and block
some paths (in different time) for 30 minutes.
tical situation. It can handle noise in measurement
and small time delays in sending the control signal.
Furthermore, Figure 7 shows a real-time situation
where 4 robots are in a threat of collision. In this ex-
ample robot 7 stops to collect an item. Thus, robot
8,9,10 has to slow down to avoid collision. This can
be seen in Figure 8 where the control signals of the
robots are zero. Once robot 7 starts to move again,
robot 8 will start moving. By, e.g. the left-hand pri-
ority, robot 10 gets higher priority than 9, so robot 10
will move forward followed by robot 9.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
7
8
9
10
dropping points
picking points
Figure 7: Threat of collisions at a junction.
115 120 125 130
0
0.02
0.04
0.06
0.08
time [s]
v [m/s]
robot 7
robot 8
robot 9
robot 10
Figure 8: Control signals of robots 7,8, 9,10.
6 CONCLUSIONS
In this work we have presented a methodology to ex-
TOWARDS A FLEXIBLE TRANSPORTATION IN DISTRIBUTION CENTERS - Low-level Motion Control Approach
159

tend flexibility and robustness of transportation in dis-
tribution centers using a group of AMR. We show
how the low-level motion controller can achieve flex-
ibility and robustness at the same time. This allows
us, by simulation, to find the best solution according
to the requirements. Our experimental results show
that the control strategies work well in a real-time sit-
uation.
To reduce the dependencyfrom simulation results,
it is important to find an analytical estimation or lower
bound of the system throughput. In addition, investi-
gation on optimal-low-level control algorithms need
to be done so better throughput can be gained.
ACKNOWLEDGEMENTS
This work has been carried out as part of the FALCON
project under the responsibility of the Embedded Systems
Institute with Vanderlande Industries as the industrial part-
ner. This project is partially supported by the Netherlands
Ministry of Economic Affairs under the Embedded Systems
Institute (BSIK03021) program.
REFERENCES
Adinandra, S., Caarls, J., Kosti´c, D., and Nijmeijer, H.
(2010). Performance of high-level and low-level con-
trol for coordination of mobile robots. In 7th Int. Conf.
on Informatics in Control, Automation and Robotics
(ICINCO), pages 63–71.
Andriansyah, R., Etman, L. F. P., and Rooda, J. E. (2010).
Flow time prediction for a single-server order picking
workstation using aggregate process times. Int. J. on
Advances of Systems and Measurements, 3:35–47.
Arai, T., Pagello, E., and Parker, L. E. (2002). Editorial:
Advances in multi-robot systems. IEEE Trans. on
Robotics and Automation, 18(5):655–661.
Buccieri, D., Perritaz, D., Mullhaupt, P., Jiang, Z.-P., and
Bonvin, D. (2009). Velocity-scheduling control for a
unicycle mobile robot: Theory and experiments. IEEE
Trans. on Robotics, 25:451–458.
Burgard, W., , Moors, M., Stachniss, C., and Schneider, F.
(2005). Coordinated multi-robot exploration. IEEE
Trans. on Robotics, 21:376386.
Chen, Y. Q. and Wang, Z. (2005). Formation control: A
review and a new consideration. In Proc. IEEE Conf.
on Robotics and Autonomous Systems, pages 3664–
3669.
Gu, J., Goetschalckx, M., and McGinnis, L. F. (2010). Re-
search on warehouse design and performance evalu-
ation: A comprehensive review. Europ. J. of Opera-
tional Research, 203:539–549.
Jager, M. and Nebel, B. (2002). Dynamic decentralized
area partitioning for cooperating cleaning robots. In
Proc. IEEE Int. Conf on Rob. and Automation, page
35773582.
Jiang, Z.-P. and Nijmeijer, H. (1997). Tracking control of
mobile robots: A case study in backstepping. Auto-
matica, 33:1393–1399.
Kanayama, Y., Kimura, Y., Miyazaki, F., and Noguchi, T.
(1990). A stable tracking control method for an au-
tonomous mobile robot. In Proc. IEEE Int. Conf. Rob.
Automation, pages 384–389.
Kosti´c, D., Adinandra, S., Caarls, J., and Nijmeijer, H.
(2009). Collision-free tracking control of unicycle
mobile robots. In Proc. IEEE Conf. on Decision and
Control, pages 5667–5672.
Kosti´c, D., Adinandra, S., Caarls, J., and Nijmeijer, H.
(2010). Collision-free motion coordination of unicy-
cle multi-agent systems. In Proc. American Control
Conference, pages 3186–3191.
Lacomme, P., Larabi, M., and Tcherne, N. (2010). Job-
shop based framework for simultaneous scheduling of
machines and automated guided vehicles. Int. J. Pro-
duction Economics, doi:10.1016/j.ijpe.2010.07.012.
Le-Anh, T. and Koster, M. B. M. D. (2006). A review of
design and control of automated guided vehicles sys-
tems. Europ. J. of Operational Research, 171:1–23.
Liu, S., Sun, D., and Zhu, C. (2010). Motion planning of
multirobot formation. In Proc. IEEE/RSJ Int. Conf. on
Intl. Robots and Systems, pages 3848–3853.
van den Berg, J. P. (1999). A literature survey on planning
and control of warehousing systems. IIE Transactions,
31:751–762.
Vis, I. F. A. (2004). Survey of research in the design and
control of automated guided vehicle systems. Europ.
J. of Operational Research, 170:677–709.
Weyns, D., Schelfthout, K., Holvoet, T., and Lefever, T.
(2005). Autonomous Agents and Multiagent Systems,
Industry Track, chapter Decentralized Control of EGV
Transportation Systems, pages 67–74. ACM Press.
Wurman, P. R., D’Andrea, R., and Mountz (2007). Coordi-
nating hundreds of cooperative, autonomous vehicles
in warehouses. AI Magazine, 29(1).
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
160
