
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN
CONTROLLER AREA NETWORKS
Bogdan Groza and Pal-Stefan Murvay
Faculty of Automatics and Computers, Politehnica University of Timisoara, Bd. V. Parvan, Timisoara, Romania
Keywords:
Authentication, Broadcast, Controller area network.
Abstract:
Controller Area Network (CAN) is a bus commonly used by controllers. The traditional view assumes that
controllers operate in secure perimeters, but, as the degree of interconnectivity with the outside world in-
creases, these networks may become open to intruders and CAN has no protection against Dolev-Yao ad-
versaries. For this purpose one can implement security on higher layers. Here we design and implement a
broadcast authentication protocol based on the well known paradigm of using one-way chains and time syn-
chronization. In this way we can benefit from the use of symmetric primitives without the need of secret shared
keys. As process control is a time critical operation, different to sensor networks where the life-time of the
node is potentially the main limitation, here the authentication delay is the main optimization criteria. Several
trade-offs are studied for this purpose in order to alleviate shortcomings on computational speed, memory,
bandwidth and to assure a uniform bus-load. As for the experimental setup, we used S12 microcontrollers
from Freescale to implement the proposed solution. To speed up cryptographic operations we also make use
of the XGATE co-processor available on S12X.
1 INTRODUCTION AND
RELATED WORK
Controller Area Network or simply CAN is a commu-
nication bus initially developed by BOSCH to be used
by controller units in vehicular systems (BOSCH,
1991). The initial specifications are now superseded
by the newer standard (ISO, 2003) while its area of
application also extended outside vehicles to automa-
tion applications in general. Although high perfor-
mance buses were developed in the last decade, such
as FlexRay, because of its efficiency and reduced cost
CAN is still the most commonly used communication
bus in automotives today.
Traditionally, in control systems in general and in
automotives in particular, reliability was a main con-
cern but only with respect to natural phenomenons
(electromagnetic disturbances, thermal noise, etc.) or
accidents of various causes but not in front of Dolev-
Yao adversaries. Thus CAN has very efficient mech-
anisms to deal with errors and to recover afterwards.
In fact, the probability of an undetected error on CAN
is extremely low, informally one undetected error oc-
curs at about one thousand years for each vehicle that
operates eight hours a day with an error each 0.7s. For
the interested reader, an in-depth study of the perfor-
mance of CAN error detection mechanism was done
in (Charzinski, 1994).
However, in the last decade, industrial control sys-
tems and automotives become opened to malicious
adversaries as well, and a significant part of the se-
curity community focused on this kind of issues. A
recent comprehensive book for security and in partic-
ular cryptographic security in automotives is (Lemke
et al., 2006) but a high amount of papers were pub-
lished since then.
In this context, of malicious adversaries that can
manipulate messages over the network, CAN does not
have intrinsic support for any kind of security. In-
deed, such kind of security is not needed if one sees
CAN as operating in a secure perimeter. But, it is
very likely that soon CAN-like networks will operate
in environments that are opened for intruders. Re-
cent research showed current automobiles to be unex-
pectedly vulnerable to external adversaries (Koscher
et al., 2010) and it is likely that many other environ-
ments in which CAN operates are not completely iso-
lated from the outside world. Security in front of
such adversaries can be achieved by implementing
this at the application level. In fact such improve-
ments happened in the past, for example when deter-
ministic delays were needed on the CAN bus with the
188
Groza B. and Murvay P..
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS.
DOI: 10.5220/0003522201880197
In Proceedings of the International Conference on Security and Cryptography (SECRYPT-2011), pages 188-197
ISBN: 978-989-8425-71-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

development of Time Triggered CAN (ISO, 2004).
Still, to best of our knowledge there is no implemen-
tation available to assure authenticity in CAN net-
works. Thus, the main intention of this paper is to
develop a higher layer implementation and to study
several trade-offs to increase its efficiency. We an-
alyze this both at a theoretical level by introducing
the corresponding formalism and by designing an ef-
ficient protocol and at a practical level by following
an efficient implementation. This is done on S12X
microcontrollers from Freescale, a family of micro-
controllers frequently found in the automotive indus-
try, with the use of the XGATE co-processor available
on S12X derivatives to speed up cryptographic func-
tions.
As for the cryptographic mechanism that can be
employed for this purpose, public-key cryptography
is not the solution because of both the computational
and communication overhead. As messages are short
in CAN networks, usually fitting in the 64 bits of
data carried by one CAN frame, using a public-key
primitive such as the RSA will require thousands of
bits and causes a significant overhead. Elliptic curves
will significantly reduce the size of the messages, but
still the computational overhead is too much to assure
small authentication delays. While the computational
overhead can be alleviated by dedicated circuits, such
as ASICs and FPGAs, this will largely increase the
cost of components, an issue that is largely avoided
by manufacturers.
In contrast, symmetric primitives were efficiently
employed for authentication in constrained environ-
ments such as sensor networks (Perrig et al., 2001b),
(Liu and Ning, 2003), (Liu and Ning, 2004). Due
to the broadcast nature of CAN, protocols similar to
the well known TESLA protocol (Perrig et al., 2000),
(Perrig et al., 2001a) can be used in this context as
well. There is an extensive bibliography related to
the TESLA protocol. Its history can be traced back
to Lamport’s scheme which uses one-way chains to
authenticate users over an insecure network (Lam-
port, 1981). The work of Bergadano et al. (Bergadano
et al., 2002) proposes several variants of one-way
chain based protocols, with or without time synchro-
nization. Previous work which inspired this family of
protocols is the Guy Fawkes protocol from (Anderson
et al., 1998). The context which is more related to our
setting here is that of the application of such protocols
in sensor networks. In particular, several trade-offs
for sensor networks were studied in (Liu and Ning,
2003), (Liu and Ning, 2004) and several variants of
the protocols are presented by Perrig as well in (Per-
rig et al., 2000), (Perrig et al., 2001a) .
In the case of the industrial controllers, some of
the constraints are similar. For example, computa-
tional power is also low and, although high speed mi-
crocontrollers are also available on the market, low
speed microcontrollers are preferred to reduce costs.
But while low computational power gives some sim-
ilarities, other constraints are different. For exam-
ple, energy consumption is a relevant issue in sen-
sor networks, but usually for control units inside a car
this is not a main concern since they do not strongly
rely on small batteries. On the other side, a differ-
ent constraint here, that is not so prevalent in sensor
networks, is the size of the message which is limited
to 64 bits on a CAN frame. Indeed, larger messages
can be split in smaller messages but the overhead in-
flicted by the structure of the CAN frame is around
50%. This becomes prevalent in the case of one-way
chain based protocols, where hash-functions are used
to compute the chain elements and thus to send an el-
ement of the chain will require at least two exchanged
messages (assuming the simplest hash function out-
puts 128 bits). To this, one will need to add the mes-
sage authentication code as well, which again requires
at least two exchanged messages, etc. Thus, at least
four CAN frames are needed to transmit just the se-
curity elements of one frame with useful information.
Still, the most critical part, in automotivecommunica-
tion and control systems in general, where this proto-
col is mostly used, are the authentication delays, i.e.,
how fast a packet can be deemed as authentic. For
this purpose, the most relevant constraint to which we
want to give a positive answer is the authentication
delay. In particular we must assure that a node, if the
bus is not taken by a higher priority message, is able to
transmit the message and the message can be checked
for authenticity as soon as possible. This condition
is initially limited by the computational power, but as
checking for authenticity can happen only as soon as
the disclosure delay expires and the next element of
the chain is committed, this also depends on the struc-
ture of the chain which is determined by the amount
of memory, and also on the bandwidth. Using too
large chains means too much time in the initialization
stage and large amounts of memory, while too short
chains means either high authentication delays or too
frequent re-initializations, etc. Depicting an optimum
in this context is not straight forward and we study
this in detail in what follows. In particular, we used in
our scheme several levels of one way chains. While
three levels of one-way chains were reported to be
close to optimal in sensor networks, due to memory
constraints and to reduce initialization in some situ-
ations we used more levels. This is because of both
the time horizon of the protocol and of the duration of
the disclosure interval. In sensor networks the disclo-
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS
189

sure interval was in the order of tens or hundreds of
milliseconds, while here, to increase communication
speed we want to reduce this as much as possible. Of
course, we are finally limited by the bus speed and
by the synchronization error, which in fault-tolerant
CAN will not allow us to drop the disclosure delay un-
der several milliseconds. Practical examples are given
in the experimental results section.
The paper is organized as follows. Section 2 gives
an overview of the protocol, starting from several de-
tails of the CAN protocol to the examination of the
influence of chain lengths, structure and timings on
performance. In section 3 we present experimental re-
sults concerning the implementation of the proposed
protocol on S12X microcontrollers. This includes ex-
perimental results for the implementation of crypto-
graphic primitives on the XGATE co-processor. Sec-
tion 4 holds the conclusions of our paper.
2 THE PROTOCOL
From an upper view the design paradigm is the fol-
lowing. Memory, computational speed and band-
width gives bounds on the length of the chains that
can be used and the number of levels. This, alongwith
the synchronization error, further bounds the authen-
tication delay, as messages cannot be authenticated
faster than the disclosure delays. Further, to improve
on the delays, we allocate equidistant timings in order
to avoid a non-uniform load on the CAN bus. Indeed,
since initialization packets must have the highest pri-
ority, if timings are non-uniform, there will be periods
when more chains need to be initialized and thus the
bus will be heavily loaded by initialization packets.
Before getting to the description of the protocol we
enumerate briefly in what follows some relevant as-
pects of the CAN bus.
2.1 Short Description of the CAN
Protocol
We are not interested here in typical aspects of the
protocol such as error detection, synchronization,etc.,
so we will not mention them. CAN bus has a broad-
cast nature. Nodes are connected by a two wire bus
topology, as shown in figure 1, and access to the bus
is gained with priority based on a message identifier
which forms the first part of a frame. This identifier
has 29 bits in extended frames and 11 bits in standard
frames. The structure of the CAN frame consists in
the arbitration field (the identifier), 6 bit control field,
0-64 bits of data, 15 bit CRC and a 2 bit acknowledge-
ment. Additionally 1 bit marks the start of frame and
7 bits mark its end. This structure is suggested in fig-
ure 2. Few words on arbitration are in order. The way
of arbitrating is by judging the winner based on the
state of a particular bit, namely recessive bits (value
1) are overwritten by dominant bits (value 0). So, if
the case, all nodes can start to write a message at the
same moment on the bus, but, whenever a node writes
a recessive bit and reads a dominant one it means that
it lost the arbitration and will stop, otherwise it can
continue. After each 6 consecutive bits of identical
values a stuffing bit of different value is added. The
body of a message can have at most 8 bytes and is fol-
lowed by a 15 bit CRC. In the worst case a frame can
have 154 bits out of which only 64 bits are of actual
useful information. Thus, the overhead is high from
the basic design of the protocol, in the worst case ex-
ceeding 50%. But this is needed to achieve reliabil-
ity as mentioned before. Two kinds of CAN nodes
are commonly available on the market: fault tolerant
low-speed nodes which operate at 128kBps and high-
speed nodes that work up to 1MBps.
Figure 1: Generic CAN Bus topology.
Figure 2: Structure of a CAN data frame.
2.2 Overview of the Protocol
The generic structure of the key chains is depicted in
figure 3. We use time synchronization and multiple
levels of one-way chains in order to authenticate the
broadcast from a particular node. Packets arriving on
the communication bus are depicted as well, the dot-
ted lines from an element of the chain to the packet
denotes that the element was used as a key, and for
the re-initialization packets in particular one element
of the key chain was also used as a message. The pic-
ture denotes the case of more than one sender, e.g.,
P
i, j
is packet sent by principal i to initialize a chain
from level j. In the next sections we will use the fol-
lowing notations:
SECRYPT 2011 - International Conference on Security and Cryptography
190

• L - number of chain levels,
• λ
i
,i = 1..L - length of the chain on level i,
• δ
i
,i = 1..L - disclosure delay on level i,
• B - bus speed, normalized to packets per second
(where one packet can carry one key),
• M - available memory (measured in elements of
the key chain that can be stored),
• S - computational speed (number of elements of
the key chain that can be computed per second),
• T - time horizon of the protocol (one may view
this as the disclosure delay of level 0),
• t - denotes actual time and is a positive integer, a
subscript indicates particular details.
Based on these notations in the next section we
discuss the optimal allocation of the broadcast param-
eters.
In principle we need two distinct protocols: an ini-
tialization protocol and a broadcast protocol. The role
of the initialization protocol is to allow each unit to
commit its initialization values and to achieve time
synchronization with other participants. This part of
the protocol can rely on more expensive operations
required by public-key cryptography. In this stage
we consider that each principal will authenticate it-
self by using a public key certificate that is signed
by a trusted authority. Initial authentication based on
public-key infrastructure is important to assure com-
posability. This ensures that different components,
from potentially different manufacturers, can be as-
sembled in one system and is a common demand of
the market today. For example, in a different context
(that of communication alone), the latest state-of-the-
art protocol, FlexRay, has communication segments
that are preallocated such that different components
from different providers can be bind into a system.
Thus we require that each node must store the public
key of a trusted authority. Although public key certifi-
cates are larger and will require more than one frame
(which can carry at most 64 bits) in general it should
not be a problem to transport them over CAN if this
does not happen too often and just in the initialization
stage.
The initialization protocol must also ensure time
synchronization. This is done with respect to a cen-
tral node, which will play the role of a communica-
tion master. As usual, synchronization between two
nodes is loose and it requires a handshake and count-
ing the round trip time until it is below a tolerance
margin. This is usually achieved in two protocol steps
as follows: A → B : N
A
;B → A : Sig
B
(t
B
,N
A
). Here
N
A
denotes a nonce generated by principal A and t
B
denotes the current time at principal B when send-
ing its response. However, in our scenario a digi-
tal signature costs tens, or hundreds of milliseconds,
which will result in a high tolerance margin that will
further require an even larger disclosure delay. Be-
cause of this, instead of a digital signature we will
use a message authentication code which is several
orders of magnitudes faster. In particular, in our ex-
periments, the round-trip-time was less than 2 mil-
liseconds. Afterwards, the round trip time ε
AB
be-
comes the synchronization error. If the nonce was
sent by A at time t
0
and now A’s clock points to t
1
then A knows that the time on B side is in the interval
[t
B
+ t
1
− t
0
, t
B
+ t
1
− t
0
+ ε
AB
]. Further, the initializa-
tion values for the chains can be shared between each
node and the central node who can broadcast them to
all communication participants. We will not insist on
details of the initialization protocol which is done in
the initial phase with no constraints.
2.3 Optimal Allocation of Key Chain
Lengths and Levels
For brevity we consider a homogeneous network with
nodes that have equal computationalabilities, thus the
same computational delays and lengths for the chains
can be handled by all of them. Otherwise, the proto-
col can be scaled according to the computational abil-
ities of each client, but we want to keep the model as
simple as possible.
To formalize the optimal allocation of chain
lengths and levels, different to previous work, we use
a tolerance relation to define the lengths of the chains
and the disclosure delays at each level. The tolerance
relation is formed by vectors which are defined as ini-
tialization values for each communication participant.
Definition 1. We say that a set of pairs < λ
i
,δ
i
>
forms tolerance relation with respect to memory,
computational speed, bandwidth and time, denoted as
< Λ, ∆ >
M,S,B,T
if the following constraints hold:
∑
i=0,L
λ
i
= λ
0
+ λ
1
+ ... + λ
L
≤ M (1)
∑
i=1,L
∏
j=0,i
λ
j
= λ
0
·λ
1
+...+λ
0
·λ
1
·...·λ
L
≤ S·T (2)
∑
i=0,L
∏
j=0,i
λ
j
= λ
0
+ λ
0
·λ
1
+ ... + λ
0
·λ
1
·... ·λ
L
≤ B· T
(3)
Relation (1) givesthe memory bound, i.e., the sum
of the lengths of the chains cannot exceed the total
memory. Relation (2) and (3) are bounds on compu-
tational time and bandwidth, i.e., the total number of
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS
191

Figure 3: Basic structure of the one-way chains.
elements of the one-way chain cannot require more
computational time than available over protocol life-
time T and cannot exceed the available bandwidth for
transmission. Value λ
0
is missing from relation (2)
as the first key chain is computed in the initialization
stage, while λ
0
is present in relation (3) as the first
key chain will be disclosed as well on the bus. In-
deed, relations (2) and (3) can be further refined for
the disclosure delays on all up to the last level since
the re-initialization of each chain should be done in
the disclosure delay of the previous level. Thus, we
can write (2) as ∀k > 1,
∑
i=k,L
∏
j=k−1,i
λ
j
=≤ S · δ
k
and the same holds for bandwidth. We introduced this
definition to keep our presentation formal, but it is ob-
vious that defining good tolerance relations is a matter
of good engineering.
The general relation between chain lengths and
disclosure delays will now be the following:
δ
i
= δ
i−1
/λ
i
,i > 0 (4)
Intuitively, this also means that ∀i,λ
i
denotes the
number of one-way functions computations that can
be performed in time δ
i−1
to generate a new chain.
Thus λ
i
can also be defined as a function of δ
i−1
. One
can use this to create sub-intervals by using the previ-
ous relation.
Remark 1. Given a tolerance relation < Λ, ∆ >
M,S,B,T
with respect to time, space and bandwidth the disclo-
sure delay and the computational overhead have an
inverse variation. Thus: the minimal disclosure delay
is achieved if chains are of equal size, i.e., λ
i
= M/L,
while the minimal computational and communication
overhead is achieved if upper level chains are smaller,
i.e., λ
0
< λ
1
< ... < λ
L
.
This is intuitively since the product of two val-
ues whose sum is fixed is maximal if the two values
are equal and minimal if one of the values is 1. For
example, assume x + y = z then ∀k ≥ 1,z/2 · z/2 >
(z/2 − k) · (z/2 + k) = z
2
/4 − k
2
. Now, to achieve
the minimum delay, the product of the chain lengths
λ
0
· λ
1
· ... · λ
L
must be maximal. If we split this prod-
uct exactly into the half left and half right terms, as-
suming an even number of terms which is wlog, then
the maximum product is achieved if: the left and right
are maximal and they are equal, and so on. To achieve
minimal bandwidth and computational requirements
we need λ
0
· λ
1
+ ... + λ
0
· λ
1
· ... · λ
L
to be minimal.
This can be written as λ
0
· (λ
1
+ ... + λ
1
· ... · λ
L
) and
as right term cannot be equal to 1 the left term must
be 1 in order to minimize the product and so on. Thus,
the optimum choice of lengths with respect to delays,
is to have all chains of equal size. For the purpose of
generality, as well as for the fact that in practice small
variations between chain lengths may occur when the
amount of available memory is not directly divisible
with the number of levels, we will keep the following
exposition for the case when chains are of arbitrary
sizes.
2.4 Optimal Allocation of Timings
By optimal allocation of the key disclosure time we
want to achieve minimal delays for sending messages
and authenticating them. Of course, the authentica-
tion delay is bounded by the disclosure delay, i.e.,
packets cannot be authenticated sooner than the dis-
closure delay from the last level. This bound was al-
ready fixed by the tolerance relation. However, the
straight forward mechanism suggested in figure 3, in
which chains are re-initialized successively, causes
more overhead at the disclosure time of keys from
upper layer chains (since at this time all chains from
lower levels need to be re-initialized as well). To
overcome this, we define a procedure which we call
equidistant timing by which all packets are disclosed
at periods of time separated by equal delays. More,
different to the use in sensor networks where upper
layer chains are used only to authenticate keycommit-
ments from the lower levels, we use chains from up-
SECRYPT 2011 - International Conference on Security and Cryptography
192

per levels to authenticate information packets as well.
Thus, we will normalize the disclosure time to:
δ
norm
=
T
λ
0
· λ
1
· λ
2
... · λ
L
(5)
In the forthcoming scheme, keys on all levels are
released at δ
norm
intervals. Of course, if we use rela-
tion (4), δ
norm
is equal to δ
L
but we prefer to use this
notation to avoid confusion with a generic scheme in
which this may not happen, i.e., not all keys are re-
leased at δ
norm
but only the keys from the chain on
level L. In what follows we need to establish three
things:
• which is the disclosure time for a particular key k
and its converse which follows,
• given a particular time t which key must be dis-
closed, or which is the last key that was disclosed
upon t,
• given a particular packet, containing authentica-
tion information, what condition must be met on
the receiver’s side to deem this packet as on-time.
To determine all these, the easiest way to decide
is by writing the time with respect to the vectors of
the tolerance relation which is established by the next
definition.
Definition 2. Given a discrete time value t we denote
by t
<Λ,∆>
=< t
L
t
L−1
...t
0
> the discrete time decom-
position of t with respect to the lengths of the chain
and normalized time as a basis, i.e., the writing of the
time value as:
t = δ
norm
·
∑
i=L..1
(t
i
·
∏
j=i..1
λ
j
) + t
0
(6)
= t
L
· λ
L
· ... · λ
1
· δ
norm
+ ... +t
1
· λ
1
· δ
norm
+ t
0
2.4.1 Sender’s Perspective.
For the moment we consider the case of a single
sender. Let t
start
denote the time at which the broad-
cast was started and assume that it is started by the
communication master which also gives time syn-
chronization. Thus t
start
is the exact time at which
the broadcast started (no drifts for the sender).
Definition 3. Let τ ∈ Λ
i, j
denote that τ is a vector
of j − i + 1 positive integers such that each element
on position i is less or equal to λ
i
. Given a tolerance
relation < Λ,∆ >
M,S,B,T
, an indexed key K
τ
is a key
entailed by a vector τ ∈ Λ
1..L
. An indexed key chain
K
<Λ,∆>
is a collection of indexed keys, derivedas fol-
lows: having a fixed fresh seed K
master
, a key deriva-
tion process K D and a one-way function F , then:
∀i ∈ [1,L],τ
i
∈ [1,λ
i
],τ
left
∈ Λ
i+1,L
,τ
right
∈ Λ
1,i−1
,
K
τ
left
|0|τ
right
= K D (K
master
,τ
left
,τ
right
),
K
τ
left
|τ
i
|τ
right
= F (K
τ
left
|τ
i
−1|τ
right
) (7)
Definition 4. Let D T (K
τ
) denote the disclosure time
of the indexed key K
τ
. Given a broadcast started at
t
start
the disclosure time of this key is:
D T (K
τ
) = t
start
+ δ
norm
·
∑
i=L..1
(τ
i
·
∏
j=i..1
λ
j
) (8)
Definition 3 allows the generation of chains with
the structure from figure 3 while definition 4 allows
keys to be released at equal time intervals δ
norm
.
Remark 2. The key released by the sender at time
t
current
given a broadcast started at t
start
is K
t
<Λ,∆>
/t
0
where t = t
current
− t
start
. By t
<Λ,∆>
/t
0
we denote all
elements from t except the last term, i.e., t
0
. This
means that
• the key is from level L−l, where l is the first non-
zero index from right to left, i.e., the maximum
value such that ∀i ≤ l,t
i
= 0,
• the position of the key on the key chain from level
l is t
l
,
• the number of chains previously released at this
level is j is t
l+1
· λ
l−1
+ t
l+2
· λ
l−1
· λ
l−2
+ ... +t
L
·
∏
i=l..L
λ
i
.
2.4.2 Reinitialization Packets and Efficiency
To avoid a non-uniform bus load, as discussed pre-
viously, re-initialization packets will be dropped
equidistantly in the δ
norm
intervals. Otherwise,
packets carrying data must be delayed until all re-
initialization packets are sent. This is because re-
initialization packets must have priority on the bus,
otherwise the protocol will succumb an will require
passing through the initialization stage again which is
even more expensive. Thus we can also use as an ef-
ficiency criteria the maximum delay until a new CAN
frame can be send. For the basic scheme the maxi-
mum delay fluctuates with the number of initializa-
tion packets. This delay can be easily established for
the basic scheme. Let z
i
(x) denote the number of con-
secutive zeros in vector x starting from position 1. At
discrete time value t, given t
<Λ,∆>
the delay until the
next packet can be sent is:
delay = max[0, z((t − t
start
)
<Λ,∆>
)] (9)
Indeed, the number of consecutive zeros at the end
of the time value denotes how many chains need to be
initialized at that particular time. This value becomes
constant for the equidistant scheme and data packets
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS
193

are delayed by at most one packet.
To complete the view on efficiency, we should
also define the overhead induced by the authentication
mechanism. The overhead has two distinct compo-
nents, the authentication overhead which is the over-
head inflicted by the authentication keys that are re-
leased on the bus, and the re-initialization overhead
which is the overhead inflicted by the re-initialization
material. Indeed, to this one may want to add the over-
head induced by the message authentication codes,
MACs, associated to each data packet that is send over
the bus. We will not take this into account because
this is application dependent, not protocol dependent,
indeed in some applications the size of the data pack-
ets can be small, and thus adding a MAC to each data
packet will greatly increase the overhead. In other ap-
plications it may be the reverse, and data packets can
be large and the MAC will not significantly increase
the overhead. Based on these we can also define the
total overhead inflicted by the protocol.
Remark 3. Given a tolerance relation < Λ, ∆ >
M,S,B,T
the authentication and re-initialization overheads and
the bus load induced by the protocol is:
OH
auth
= (λ
0
+ λ
0
· λ
1
+ ... + λ
0
· λ
1
· ... · λ
L
) · B
−1
(10)
OH
reinit
= (λ
0
· λ
1
+ ... + λ
0
· λ
1
· ... · λ
L
) · B
−1
(11)
OH
total
= OH
auth
+ OH
reinit
(12)
One may note that if the authentication delay
is bigger the overhead also becomes lower since
fewer elements of the chain are sent. Also, the re-
initialization overhead increases with the number of
levels. We give concrete examples for these in the
experimental results.
Figure 4 shows the influence of chain length on
bus overhead and disclosure delays. Plots are given
for three and four levels of key chains. We note
that the delays drop rapidly by increasing the num-
ber of levels, but in the same manner the overhead
increases (at 100% the bus is locked and communica-
tion halted). Figure 5 shows the variation of memory
requirements, which is the same as the initialization
time, and of the number of re-initialization packets
with the number of chain levels. All plots are taken
for a time range of 24 hours, in figure 5 the delay is
fixed to 5 ms.
2.4.3 Receiver’s Perspective
We consider the case of a sender S with synchroniza-
tion error ε
S
and a receiver R with synchronization
0
50
100
150
200
250
0.2
0.4
0.6
0.8
1.0
Bus OH H4 levelsL
Delay
H4 levelsL
Delay H3 levelsL
Bus OH H3 levelsL
Figure 4: Delay and overhead variation with chain length.
1
2
3
4
5
6
7
1000
2000
3000
4000
5000
6000
7000
Memory and
Initialization Time
Re-initialization packets
Hper secondL
Figure 5: Memory, initialization time and re-initialization
packets variation with number of levels.
error ε
R
. Now we define the security condition that
must be met by all packets that contain authentica-
tion information, i.e., MAC codes, produced with an
indexed key K
τ
.
Definition 5. Given synchronization errors ε
S
and ε
R
for sender and receiver, an authentication packet in-
dexed by τ must discarded unless:
T
rec
(P
τ
) ≤ D T (τ) − ε
S
− ε
R
(13)
Here T
rec
(P
τ
) denotes the time at which packet P
τ
was received. Here we assume that the time on the
receiver side is common to that on the sender’s side,
since this is after the synchronization. Thus T
rec
(P
τ
)
is the minimum time value on the sender’s side, while
the synchronization errors on the right side ensure a
safe margin for the maximum time value.
2.4.4 Protocol Description
We can now summarize previous notions in one defi-
nition for the entire protocol.
Definition 6. Given tolerance relation < Λ,
∆ >
M,S,B,T
, an indexed key chain K
<Λ,∆>
and the two
roles sender and receiver denoted by S , R each with
synchronization errors ε
S
, ε
R
with respect to a com-
mon clock, protocol Broadcast[S ,R ,< Λ,∆ >
M,S,B,T
SECRYPT 2011 - International Conference on Security and Cryptography
194

,K
<Λ,∆>
] is formed by the following two rules for the
two roles:
1. S sends K
τ
at D T (K
τ
) and the message M and
its corresponding MAC(K
τ
,M) in any empty time-
slot with the condition that MAC(K
τ
,M) is re-
leased no latter than D T (K
τ
) + ξ,
2. R discards all MAC(K
τ
,M) received later than
D T (K
τ
) + ε
S
+ ε
R
and deems authentic all other
messages for which MAC(K
τ
,M) can be verified
with an authentic key. A key K
τ
left
|τ
i
|τ
right
is au-
thentic only if K
τ
left
|τ
i
|τ
right
= F (K
τ
left
|τ
i
−1|τ
right
) and
K
τ
left
|τ
i
−1|τ
right
is a previously received/computed
authentic key.
Here ξ denotes a tolerance margin until the sender
can send a MAC with a particular key. Indeed, send-
ing MACs too close to the disclosure time may be use-
less because the receiver may have to discard them if
the security condition cannot be met. Thus ξ must
be fixed as initial parameter for the protocol and
it must hold that ε
S
+ ε
R
<< ξ. In time interval
[D T (K
τ
),D T (K
τ
)+ξ] the sender can safely disclose
any kind of data packet, but not MACs.
Broadcast[S , R ,< Λ,∆ >
M,S,B,T
,K
<Λ,∆>
] is a se-
cure broadcast authentication protocol. The security
of this family of protocols is well established, the
informal argument is that the adversary cannot con-
struct MAC(K
i
,M), until K
i
is released. As function
F is one-way he cannot derive K
i
from F (K
i
) and
by the time K
i
is released any MAC with K
i
that is
further received will be discarded. Formal proofs for
such protocols can be found in (Perrig et al., 2001a),
(Bergadano et al., 2002).
2.5 The Case of Multiple Senders
The case of k senders can now be easily derived from
the previous formalism. To preserve the equidistant
time schedule we use the nominal disclosure time
δ
norm
and divide it by the number of senders k. Let
us define the next sender delay as:
δ
next
=
δ
norm
k
(14)
Definition 7. Let D T (K
τ
) denote the disclosure time
of an indexed key by the by the k
th
sender. Given a
broadcast started at t
start
we have:
D T (K
τ
,k) = D T (K
τ
) + k· δ
next
(15)
The security conditions which has to be verified
by receivers must also add the k· δ
next
term to the dis-
closure time of the k-th sender.
3 APPLICATION SETTING AND
EXPERIMENTAL RESULTS
As stated, for the implementation of the previously
described protocol, we used a Freescale 16-bit au-
tomotive grade microcontroller (MC9S12XDT512)
from the S12X family on a SofTec Microsystems ZK-
S12-B development board. One special feature of this
family is the presence of an incorporated co-processor
called XGATE which can be used to increase the mi-
crocontroller’s data throughput (Freescale, 2004). We
made use of this module to increase the efficiency of
our implementation by assigning it the task of com-
puting the underlying cryptographic functions.
The S12X microcontrollers used in our exper-
iments have 512Kbytes of FLASH memory and
20Kbytes of RAM. Both FLASH and RAM memo-
ries are banked as a consequence of the 16 bits wide
address bus which is not sufficient to access all mem-
ory locations. Thus, a total of 8Kbytes of RAM space
can be used for continuous allocation while the rest
of the RAM can be accessed in 4Kbyte windows. The
amount of RAM memory that can be used for storing
key chains is relevant as it determines the maximum
number of chain levels and their lengths.
The maximum bus frequency that can be set us-
ing the PLL module is, according to the data-sheet,
40MHz. We configured the PLL for frequencies be-
yond this specified value and were able to go up to
speeds of 80MHz. After assessing that the behaviour
of the microcontroller at this overclocked frequency
is normal we used it in our tests and compared the
results with the ones obtained for 40MHz.
The on-chip CAN module implements version
2.0A/B of the CAN protocol and supports a pro-
grammable bit-rate up to 1 MBps. A limitation for
the maximum achievable CAN speed comes from the
on board low speed fault tolerant transceiver which
can only run at speeds up to 125Kbaud.
3.1 XGATE Module
The XGATE module has a built in RISC core with in-
structions for data transfers, bit manipulations and ba-
sic arithmetic operations. The RISC core can access
the internal memories and peripherals of the micro-
controller without blocking them from the main S12X
CPU. The S12X CPU always has priority when the
two CPUs access the same resource at the same time.
To assure data consistency, the access priority can be
controlled by using the hardware semaphores avail-
able on the microcontroller.
Interrupts can be routed to the XGATE module in
order to decrease the interrupt load of the main S12X
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS
195
CPU. Additionally, up to 8 software triggered chan-
nels can be used by the S12X CPU to request software
execution on XGATE.
In order to obtain the maximum XGATE CPU
speed, the code can be executed from RAM. Because
RAM is a volatile memory, XGATE code is being
stored into the FLASH memory and copied into RAM
after each reset. Having a better RAM access speed
and a speed-optimized instruction set, a typical func-
tion can run up to 4.5 times faster on XGATE than
on the S12X CPU (Mitchell, 2004). Because it was
designed for quick execution of small code requested
by interrupts, the flash memory available for storing
XGATE code is limited. For controllers in the S12XD
family this limit is 30 Kbytes.
3.2 Implementation Details
To decrease the communication overhead that could
be introduced by computing cryptographic primitives
we assigned this task to the XGATE module. In or-
der to evaluate the computational performance of the
microcontroller we measured the execution speed of
three hash functions: MD5, SHA1 and SHA-256.
Measurements were done on S12X and XGATE for
different input lengths using both the maximum spec-
ified frequency and the overclocked frequency. The
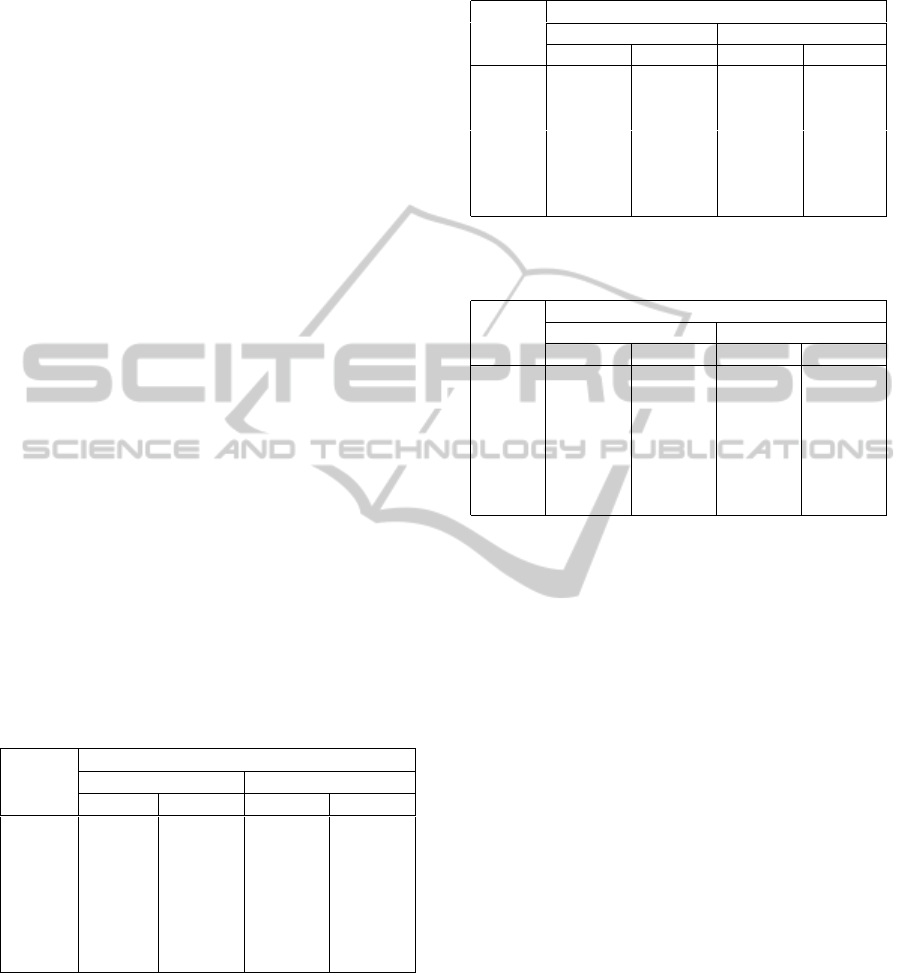
measurements presented in tables 1, 2 and 3 show
that on average the hash functions were performed
approximately 2.12 times faster on XGATE than on
S12X. The overclocking also increases the speed with
a factor of 2.
Table 1: Performance of S12X and XGATE in computing
MD5.
Length
(bytes)
Execution time
@ 40MHz @ 80MHz
S12X XGATE S12X XGATE
0 732µs 312.5µs 371µs 156.2µs
1 736µs 314.5µs 373µs 157.4µs
3 737µs 314.5µs 373µs 157.2µs
14 738µs 316.0µs 374µs 158µs
26 739µs 317.5µs 374.5µs 158.9µs
62 1414µs 605µs 717µs 303µs
80 1374µs 592µs 697µs 296.5µs
We chose MD5 for building the one-way chains
which are needed by the protocol. Due to the small
disclosure delay we consider that using MD5 is safe
for our scenario. Each chain element will thus be a
128 bit value which is used to perform an HMAC over
the message that has be sent at a certain point in time.
All cryptographic computations are done on the
XGATE module following a software request. For
passing data between the two processing units, a com-
Table 2: Performance of S12X and XGATE in computing
SHA1.
Length
(bytes)
Execution time
@ 40MHz @ 80MHz
S12X XGATE S12X XGATE
0 2.285ms 1.000ms 1.144ms 500µs
1 2.290ms 1.002ms 1.146ms 501µs
3 2.290ms 1.002ms 1.146ms 502µs
14 2.290ms 1.004ms 1.148ms 502µs
26 2.295ms 1.004ms 1.148ms 503µs
62 4.510ms 1.976ms 2.255ms 988µs
80 4.470ms 1.962ms 2.235ms 982µs
Table 3: Performance of S12X and XGATE in computing
SHA-256.
Length
(bytes)
Execution time
@ 40MHz @ 80MHz
S12X XGATE S12X XGATE
0 5.51ms 3.155ms 2.755ms 1.578ms
1 5.52ms 3.155ms 2.760ms 1.580ms
3 5.52ms 3.155ms 2.760ms 1.580ms
14 5.50ms 3.150ms 2.755ms 1.578ms
26 5.49ms 3.145ms 2.750ms 1.578ms
62 10.86ms 6.24ms 5.44ms 3.125ms
80 10.80ms 6.22ms 5.40ms 3.115ms
mon memory area is used. Each time a hash needs to
be computed, the S12X writes the input data in the
common memory area and makes a software request
to the XGATE module. While the hash is computed
on the XGATE side, the main CPU is free to execute
other tasks such as, receiving messages or sending
messages that have been already built. The XGATE
module can signal the end of the function execution
by issuing an interrupt to the S12X CPU.
After protocol implementation, the total RAM
memory left for storing key chains can hold 1216 ele-
ments (16 bytes each). Having this upper limit for M,
L and λ have to be determined for best performances
based on the bus speed and the desired disclosure de-
lay. If we consider packets of 16 bytes in size, the
measured bus speed for sending packets is 578 pack-
ets/second (one packet each 1.730ms).
For example, if we decide to use three levels to
assure authentication over a period of one day with
a speed of 578 packets/second, we would have 233
elements on each level and the key disclosure time
δ would be 6.8ms. The bus overhead for this situa-
tion is 25,2% and the time needed to initialize the key
chains is approximately 700ms. Increasing the num-
ber of levels to 5 leads to chains of 26 elements so
less memory is necessary and the time needed for ini-
tialization is reduced to 131ms. The cost of these im-
provements is a bus overhead of 26.9%. The bus load
grows exponentially with the increase in the number
SECRYPT 2011 - International Conference on Security and Cryptography
196

of levels used while the disclosure delay depends on
the transmission speed and the total communication
duration. The duration of the communication also af-
fects the number of elements on each level which is
upper bounded to M/L (1216/L in our setting).
To further improve performance, using small scale
variants of hash functions, as proposed in (Macchetti
and Rivard, 2005) can be an interesting alternative.
However, as collisions on these functions were al-
ready reported in (Steurer, 2006), a more in depth
analysis is needed before using them in practice and
we leave this as potential future work.
4 CONCLUSIONS
A protocol for assuring broadcast authenticity on the
CAN bus was provided. We studied different trade-
offs in order to depict the optimal choice of param-
eters. In particular we concluded that the main lim-
itation is the bus speed (limited to 128kBps in fault-
tolerant CAN), followed by memory and last by com-
putational power. This is also due to the performance
of the XGATE co-processor which is about two times
faster than the regular S12 processor. In some cases,
to reduce memory consumption and to shorten the ini-
tialization time, chains with more than three levels
were also efficient. The theoretical estimations are en-
tailed by experimental results on the S12X processor,
a commonly used automotive grade microcontroller.
As future work we plan to extend this paper with ex-
perimental results on other microcontrollers and to
use a real-world communication scenario for an au-
tomotive network. By this research we hope that we
give a first analysis on the feasibility of such a solu-
tion.
ACKNOWLEDGEMENTS
This work was supported by CNCSIS-UEFISCDI
project number PNII-IDEI 940/2008 and by the
strategic grant POSDRU 107/1.5/S/77265, inside
POSDRU Romania 2007-2013co-financed by the Eu-
ropean Social Fund - Investing in People.
REFERENCES
Anderson, R., Bergadano, F., Crispo, B., Lee, J.-H., Man-
ifavas, C., and Needham, R. (1998). A new family
of authentication protocols. SIGOPS Oper. Syst. Rev.,
32:9–20.
Bergadano, F., Cavagnino, D., and Crispo, B. (2002). Indi-
vidual authentication in multiparty communications.
Computers & Security, 21(8):719 – 735.
BOSCH (1991). CAN Specification Version 2.0. Robert
BOSCH GmbH.
Charzinski, J. (1994). Performance of the error detection
mechanisms in can. In Proceedings of the 1st Interna-
tional CAN Conference, pages 20–29.
Freescale (2004). MC9S12XDP512 Data Sheet, Rev. 2.21,
October 2009. Freescale.
ISO (2003). ISO 11898-1. Road vehicles - Controller area
network (CAN) - Part 1: Controller area network data
link layer and medium access control. International
Organization for Standardization.
ISO (2004). ISO 11898-4. Road vehicles - Controller area
network (CAN) - Part 4: Time triggered communica-
tion. International Organization for Standardization.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno, T.,
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., and Savage, S. (2010). Experimental
security analysis of a modern automobile. In Security
and Privacy (SP), 2010 IEEE Symposium on, pages
447 –462.
Lamport, L. (1981). Password authentication with insecure
communication. Commun. ACM, 24:770–772.
Lemke, K., Paar, C., and Wolf, M. (2006). Embedded Secu-
rity in Cars Securing Current and Future Automotive
IT Applications. Springer Verlag.
Liu, D. and Ning, P. (2003). Efficient distribution of key
chain commitments for broadcast authentication in
distributed sensor networks. In Proc. of the 10th An-
nual Network and Distributed System Security Sympo-
sium, pages 263–276.
Liu, D. and Ning, P. (2004). Multilevel µtesla: Broadcast
authentication for distributed sensor networks. ACM
Trans. Embed. Comput. Syst., 3:800–836.
Macchetti, M. and Rivard, P. (2005). Small-scale variants
of the secure hash standard. In ECRYPT workshop on
RFID and lightweight cryptography.
Mitchell, R. (2004). Tutorial: Introducing the XGATE Mod-
ule to Consumer and Industrial Application Develop-
ers, March 2006. Freescale.
Perrig, A., Canetti, R., Song, D., and Tygar, J. D. (2001a).
Efficient and secure source authentication for multi-
cast. In Network and Distributed System Security Sym-
posium, NDSS ’01, pages 35–46.
Perrig, A., Canetti, R., Song, D., and Tygar, J. D. (2001b).
Spins: Security protocols for sensor networks. In
Seventh Annual ACM International Conference on
Mobile Computing and Networks (MobiCom 2001),
pages 189–199.
Perrig, A., Canetti, R., Tygar, J., and Song, D. X.
(2000). Efficient authentication and signing of multi-
cast streams over lossy channels. In IEEE Symposium
on Security and Privacy, pages 56–73.
Steurer, M. E. (2006). Multicollision attacks on iterated
hash functions. Technical report.
HIGHER LAYER AUTHENTICATION FOR BROADCAST IN CONTROLLER AREA NETWORKS
197
