
APPLICATION-TRANSPARENT INTEGRATION OF SIMULATION
TOOLS IN A WSN DEVELOPMENT ENVIRONMENT
Juan Luis Font, Pablo I˜nigo, Manuel Dom´ınguez, Jos´e Luis Sevillano and Daniel Cascado
Department of Computer Technology and Architecture, University of Seville, Seville, Spain
Keywords:
WSN, ns-3, Serial communication, Simulation, Emulation, Sink node.
Abstract:
The use of simulation tools in the development of new Wireless Sensor Networks protocols and applications
should be accompanied by minimisation of redundant code and work, making it possible to seamlessly run the
same code on simulated and real platforms. This work proposes an architecture for a WSN testing platform
that integrates simulation tools in an application-transparent way. The platform will be focused on testing the
WSN sink node and providing it with both real and simulated data. The novelty of this approach lies in the
use of a flexible network simulation tool not focused on a specific network technology, and the use of generic
hardware and open source tools.
1 INTRODUCTION
A Wireless Sensor Network consists of a spatially dis-
tributed set of nodes that cooperatively monitor phys-
ical or environmental conditions. These nodes are
equipped with sensing hardware to collect informa-
tion from the environment, and radio-frequency com-
munication hardware which makes wireless commu-
nication possible.There are several constrains related
to power consumption and hardware cost translate in
the use of inexpensive hardware with low computing
power (Guti´errez et al., 2003). The nodes that act as
gateways between the WSN and an external network
are identified as ”sink nodes”. A sink node forwards
information from the WSN to the outside so it needs
to be connected to both the WSN and the external net-
work.
The development of WSN based applications ben-
efits from the use of simulation tools, (Obaidat and
Papadimitriou, 2003) and (Obaidat and Boudriga,
2010) , which reduce development time and cost.
Simulation models usually have a high abstraction
level so simulation testing results may differ from
real-world ones, but they are still useful enough to
evaluate and test new network features. Due to the
differences between WSN devices and their simula-
tion models, the code for the testing platform may re-
quire considerable changes to be able to run on the
final platform. The SER (Kiess and Mauve, 2007) ap-
proach (Simulation + Emulation + Real-world) aims
to integrate simulation, emulation and real-world
based experiments while keeping the differences be-
tween testing platforms application-transparent for
the tested code. Emulation is defined in our context as
the use of a combination of real-world and simulated
components. Nevertheless, some platform systems
has been chosen due to their compliance with other
emulation definition where virtual elements mimic
their real counterparts functionality in a indistinguish-
able way.
This work proposes a testing platform built based
on simulation tools and real-world WSN elements
(Sobeih et al., 2006). It will allow application-
transparent integration between WSN elements and
simulation tools. The ultimate goal is the defini-
tion of a testing platform where real-world elements
can be replaced by simulated or emulated ones in a
application-transparent way.
2 ARCHITECTURE
DESCRIPTION
The architecture identifies the main elements of the
platform by defining their roles. The overall structure
is shown in the Figure 1.
• WSN is replaced by a simulation. Its mission is to
feed the sink node with simulated data.
• The sink node runs on a real hardware platform.
Its components are real-worlddevices with the ex-
94
Luis Font J., Iñigo P., Domínguez M., Luis Sevillano J. and Cascado D..
APPLICATION-TRANSPARENT INTEGRATION OF SIMULATION TOOLS IN A WSN DEVELOPMENT ENVIRONMENT.
DOI: 10.5220/0003523700940097
In Proceedings of the International Conference on Data Communication Networking and Optical Communication System (DCNET-2011), pages 94-97
ISBN: 978-989-8425-69-0
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ception of the communication channel which con-
nects it with the simulated WSN.
• The link between simulated WSN and sink node
will be an emulated communication channel.
Both simulation and sink software will be adapted
to intercommunicate through this emulated link.
Figure 1: Overall view of the architecture proposal.
The sink node is built based on standard x86 hard-
ware. A standard personal computer provides a hard-
ware platform suitable for developing and testing sink
nodes and it has a considerable amount of computing
resources in comparison with the average WSN node.
This work has used the prototype sink node as host
device of the simulation process too, so it has been
mandatory to choose a hardware platform powerful
enough to simultaneously run both the sink software
and the network simulation. The extra resources are
aimed to support the simulation execution.
All the sink devices are real with the exception
of the WSN network interface. This radio-frequency
device is replaced as data source by a simulation pro-
cess, as shown in Figure 2. Thanks to the proposed
design, the simulated data source can be replaced by a
real one without a major rewrite of the sink software.
Figure 2: Structure of the simulation elements.
The WSN is replaced by a simulation that gener-
ates data and forwards it to the sink node. This first
proposal replaces the WSN data with a basic simu-
lation. An existing network simulator has been cho-
sen as the basis for the simulation. This reduces the
coding effort to adapt the simulation tool and enable
its communication with the sink software. Future im-
provements can be made in the simulator to provide it
with new features and improve its accuracy and func-
tionality. The integration work has focused on en-
abling the WSN simulation to dump data in the em-
ulated communication channel which interconnects it
with the sink software.
The emulated communication channel intercon-
nects the sink software with the simulated WSN. Em-
ulation has been chosen because it is very close to its
real-world counterpart in terms of functionality, per-
formance and interface, so the change from this vir-
tual channel to a real one will have little or no effect
on the source code communication.
3 TECHNICAL
CONSIDERATIONS
This section discusses technical topics related to the
testing platform architecture and describes a set of
hardware and software elements that have been used
for its implementation.
3.1 Network Simulator
Ns-3 is a suitable choice for simulation task in the
testing platform (Font et al., 2010), (Font et al., 2011).
Ns-3 doesn’t have specific models for WSN technolo-
gies such as Zigbee or Bluetooth. It can implement
general purpose wireless networks based on 802.11
or WiMAX technologies and counts with propagation
and physical channel models (Obaidat and Boudriga,
2010). Nevertheless, the aim of the platform is pro-
viding data to the sink node. The simulation is fo-
cused on generating data traffic and forwarding it to
the sink node.
The ns-3 simulation generates data that is for-
warded to the node object which contains the
P2PEmuDevice object. This relays the information
outside the simulation environment through an emu-
lated channel. The process that implements the sink
routines only has to connect to the above emulated
channel.
Ns-3 already has class to emulate a network
device which is internally connected to a real
Ethernet device, the
ns3::EmuNetDevice
. The
ns3::P2PEmuDevice
class has been defined follow-
ing this design but replacing the real Ethernet device
by a serial device and adapting it to the requirements
of the point-to-point transmission.
APPLICATION-TRANSPARENT INTEGRATION OF SIMULATION TOOLS IN A WSN DEVELOPMENT
ENVIRONMENT
95

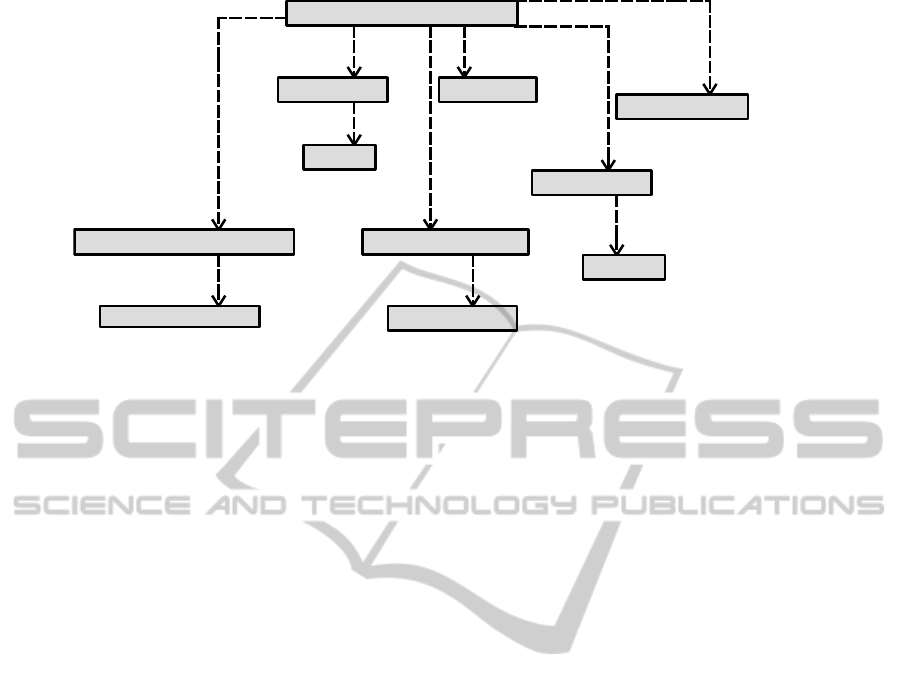
The figure 4 shows the inheritance diagram of the
P2PEmuDevice class. The
ns3::P2PEmuDevice
in-
Figure 3: Inheritance diagram of P2PEmuDevice class.
stance is contained in a
ns3::Node
object. The ns-3
static routing mechanisms help to forward data from
any other simulated device to the P2PEmuDeviceone.
This also needs an auxiliary queue with tail drop al-
gorithm, implemented by
ns3::DropTailQueue
.
The use of a real-time simulator is needed
to interact with the real world on regular
time basis so the simulation makes use of the
ns3::RealTimeSimulationImpl
, also included in
ns3.
The Figure 3 shows the relation between
P2PEmuDevice and several other ns-3 classes.
3.2 Hardware and Software Platform
Standard hardware based on x86 has been used to
build the sink node. A standard personal computer
can easily meet all the sink hardware requirements
with cheap components and the addition of a radio-
frequencynetwork deviceto allows it to communicate
with the rest of the WSN. Some previousgateway pro-
posals have chosen embedded ARM solutions (Song
et al., 2008), (Yang and Yan, 2010). Due to their
amount of resources, they have even the capacity of
running general purpose operating systems or adapted
versions such as embedded versions of GNU/Linux or
Windows. Moreover, choosing such hardware plat-
forms allows the use of a wide range of development
and debugging tools.
Thus, the prototype sink node hardware consid-
erably differs from the rest of the autonomous nodes
in terms of hardware, software, power consumption
and computing power. The sink node hosts both WSN
simulation and sink software.
The platform prototype has been built on Debian
GNU/Linux 6.0 Stable, which support ns-3 simula-
tor and it has all the required software dependen-
cies in its package repository. Other general purpose
GNU/Linux distributions are also suitable for running
ns-3, e.g.. Fedora or Ubuntu.
3.3 Emulated Communication Channel
A pseudo-terminal is defined as pseudo-device pair
which provides a text terminal interface without as-
sociated virtual console, computer terminal or serial
port hardware. Instead, a process acts as the under-
lying hardware for the pseudo terminal session. It is
present in some operating systems, including Unix-
like ones and there are several implementation ap-
proach and standards that regulate their nomenclature,
and programming API. Unix 98 standards define an
API to create and use pseudo terminals which are not
restricted in number by nomenclature, only by imple-
mentation. It proposes a master-slave design based on
two different types of pseudo-devices linked between
them: Pseudo Terminal Master (PSM) responds to
/dev/ptmx
device name in GNU/Linux systems; and
Pseudo Terminal Slave (PTS) have a name of the form
/dev/pts/X
in the GNU/Linux file system, being X a
natural number which automatically increases in one
unit for each new PTS. Each time a process opens the
PTM device, a new PTS is automatically created, ex-
isting a connection between the file descriptor of the
PTM and the slave pseudo terminal.
Basic Unix 98 API functions have been used to
interact with the PTM device:
•
int posix openpt(int oflag)
, opens the
/dev/ptmx
device and returns the associated file
descriptor.
•
int grantpt(int fd)
, grants access to the
slave pseudo-terminal.
•
int unlockpt(int fd)
, unlocks a pseudo-
terminal master/slave pair.
•
char *ptsname(inf fd)
, gets the name of the
pseudo-terminal.
4 CONCLUSIONS AND FUTURE
WORK
This work has defined and implemented the archi-
tecture of a WSN platform that integrates simulation
and real elements in a application-transparent way.
The main elements have been identified, their roles
have been defined and several technologies and tools
have been proposed to implement the testing plat-
form. The resulting proposal lays the groundwork for
future works to improve its features and determine its
scalability and range of application.
DCNET 2011 - International Conference on Data Communication Networking
96
fi
fifi
fi
fi
fi
fi
fi
fi
fi
fi
Figure 4: Simplified ns3::P2PEmuDevice class diagram.
There are some topics likely to be discussed and
expanded in future related work such as the evalua-
tion of time restrictions, the scalability of the WSN
simulation or the overall performance of the platform.
Another interesting line of work is laying the founda-
tions for monitoring the system to detect performance
degradation. Integration of emulation tools is also
proposed to allow simulated, emulated and real-world
experiments in the same platform.
ACKNOWLEDGEMENTS
This work was partially supported by contract Vul-
cano: TEC2009-10639-C04-02.
REFERENCES
Font, J. L., I˜nigo, P., Dom´ınguez, M., Sevillano, J. L., and
Amaya, C. (2010). Architecture, design and source
code comparison of ns-2 and ns-3 network simulators.
CNS-10, 13th Communications & Networking Simu-
lation Symposium, pages 29–36. Best Paper Award.
Font, J. L., I˜nigo, P., Dom´ınguez, M., Sevillano, J. L., and
Amaya, C. (2011). Analysis of source code metrics
from ns-2 and ns-3 network simulators. Simulation
Modelling Practice and Theory, 19(5):1330 – 1346.
Guti´errez, J. A., Callaway, E. H., and Barrett, R. L. (2003).
Low-Rate Wireless Personal Area Networks. IEEE
Press, New York, 1st edition.
Kiess, W. and Mauve, M. (2007). A survey on real-world
implementations of mobile ad-hoc networks. Else-
vier’s Ad Hoc Networks, 5(3):324–339.
Obaidat, M. S. and Boudriga, N. A. (2010). Fundamentals
of Performance Evaluation of Computer and Telecom-
munication Systems. John Wiley & Sons, Hoboken,
New Jersey, 1st edition.
Obaidat, M. S. and Papadimitriou, G. (2003). Applied
System Simulation: Methodologies and Applications.
Springer, 1st edition.
Sobeih, A., Hou, J. C., Kung, L., Li, N., and Zhang, H.
(2006). J-sim: A simulation and emulation environ-
ment for wireless sensors networks. Wireless Commu-
nications, IEEE, 13(4):104–119.
Song, P., Chen, C., Li, K., and Sui, L. (2008). The de-
sign and realization of embedded gateway based on
wsn. International Conference on Computer Science
and Software Engineering, 4:32–36.
Yang, F. and Yan, C. (2010). Design of wsn gateway based
on zigbee and td. ICEIE 2010, International Con-
ference on Electronics and Information Engineering,
2:V2–76–V2–80.
APPLICATION-TRANSPARENT INTEGRATION OF SIMULATION TOOLS IN A WSN DEVELOPMENT
ENVIRONMENT
97
