
APPLICATION OF INTERNAL MODEL CONTROLLER FOR
WIND TURBINE SYSTEM CONSIDERING TIME-DELAY
ELEMENT
Faramarz Asharif, Shiro Tamaki, Tstomu Nagado
Faculty of Engineering, Ryukyu University, Okinawa, Japan
Nagata Tomokazu, Mohammad Reza Alsharif
Faculty of Engineering, Ryukyu University, Okinawa, Japan
Keywords: Internal Model Controller, Tele-Operation, H
2
norm, MIMO System, Wind Turbine.
Abstract: In this paper, we aim to modify the system which includes time-delay elements including closed loop system
and uncertainty of the wind turbine system and time-delay elements. Time-delay will happen during the long
distance communication. By observing and controlling the attitude of wind turbine system from distance, the
transmitted control input and output signal will be delayed certainly. For this reason even thought wind
turbine system is a stable system, but it will be an unstable system by time-delay elements. So, here we
consider about the IMC method which is one of the robust controllers. IMC method is composed of optimum
controller and uncertainty model of control object and time-delay elements. The optimum controller is
designed by minimizing the coefficients of external disturbance of output signal by H
2
norm in order to
stabilize the closed loop system considering the uncertainty of control object and predicted time-delay
element and at the same time minimize the effects of time-delay element in sensitivity function. In this
research controlling of the angular velocity and pitch angle of bale is considered. In order to have a stable
angular velocity, we implied Internal Model Controller. As consequences, angular velocity converges to
reference signal with good performance.
1 INTRODUCTION
In this research, we propose control of the time-
delay system by using IMC (Internal Model
Controller).There were many schemes and
suggestions to consider about the designing
controller for systems which including time-delay
elements. For example the classical way is PID
controller (Proportional, Integral Derivative).
However, this scheme is not suitable for large time-
delay. On the other hand, LQI (Linear Quadratic
Integration) method which is modern way and it
warranties the stability even for a large time-delay.
However, for MIMO system, it is very difficult to
construct a suitable controller due to existence of
time-delay elements. Therefore, we consider IMC
method to control the system including time-delay
elements. Time-delay will happen during utilization
of the long distance communication. The application
of the long distance communication is an important
issue in aerospace engineering. When we have a
control object in the long distance, the transmitter’s
signal will be delay. Therefore the received signal at
The control object will also be delayed. Moreover,
the feedback signal to transmitter location will also
be delayed. So, in this case, we have a round trip
delay, one delay is to reach the control object and
another delay is to receive the feedback signal for
comparison with the reference signal. This
comparison makes the error signal of the control
system. This error must be decreased for a better
controlling system. Moreover, control object will be
unstable due to time-delay elements. Therefore, in
this paper we consider the stability of control object
and its uncertainty. Also, not only the uncertainty of
control object, but also the uncertainty of time-delay
elements which is estimated and approximated by
using Pade approximation has been considered. IMC
method is minimizing the coefficient of external
disturbance of output signal by H
2
norm. Therefore,
by this design problems of the system instability,
199
Asharif F., Tamaki S., Nagado T., Tomokazu N. and Reza Alsharif M..
APPLICATION OF INTERNAL MODEL CONTROLLER FOR WIND TURBINE SYSTEM CONSIDERING TIME-DELAY ELEMENT.
DOI: 10.5220/0003531601990202
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 199-202
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
uncertainty and external disturbance have been
overcomes. Then, it can be solved by one of the
robust controller such as IMC method.
2 THE BASIC THEORY OF
TIME-DELAY SYSTEM AND
BACK GORUND OF
RESEARCH
As we express in introduction in this research, we
have a round trip time-delay system which means
one delay element to reach the control object and
another delay element to feedback the output signal
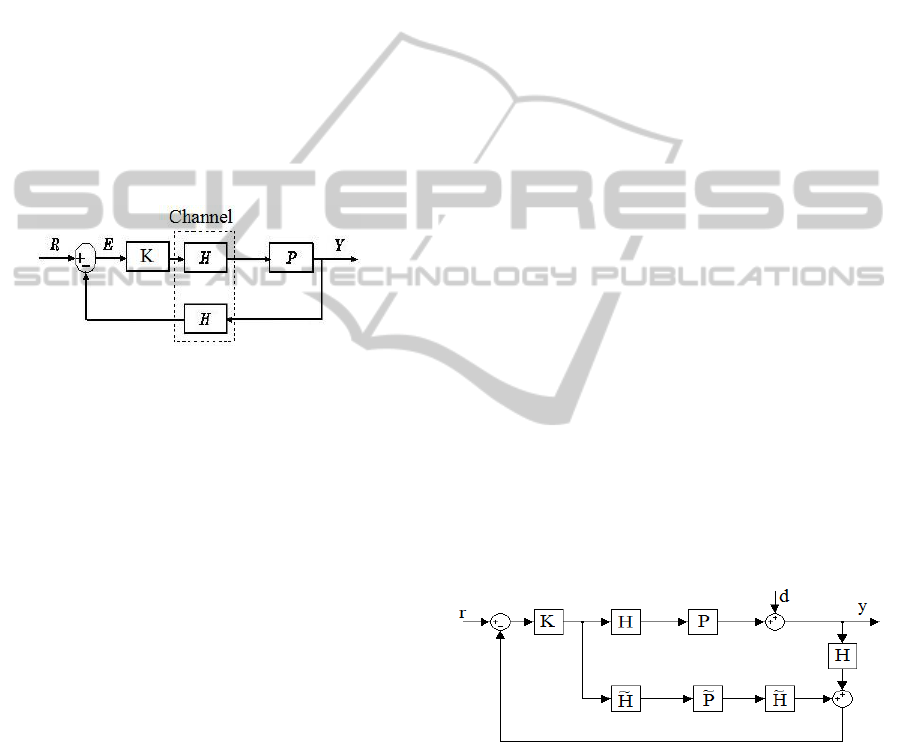
in order to compare with reference signal. Figure.1
shows the block diagram of a round trip time-delay
system without controller.
Figure 1: Conventional feedback control.
Here “Y”,”H”,”R”,”P” and “E” are the output
signal of the system, time-delay element, reference
signal, control object and error signal of the system,
respectively. Through figure 1 it is clear that the
sensitivity (S) and transfer function (T) are obtained
as follows:
)
2
( PKHIS +=
(1)
PKHPKHIT
1
)
2
(
−
+=
(2)
Generally, in feedback control system, by
adding some controller such as “K” which is
designed corresponding to control object, we can
minimize the error signal. Therefore, in classical
control usually PID controller and in modern control
integrator operation and optimum gain such as LQI
method are used. But, minimizing the error signal of
the system is not enough. Also, we have to make the
system stable if it is an unstable system. Especially,
in this research, the system is unstable due to time-
delay elements. As we expressed in the background
of this research, we tried the classical control (PID
Controller) and modern control (LQI method). As a
result, for PID controller if time-delay is large,
system could not preserve the stability. But for
Modern scheme LQI method we could make the
system stable without error. However, for high
dimension and MIMO system we couldn’t design
the optimum controller because of complexity of
solving the Ricatti equation. Therefore, in this
research we propose the IMC method which is one
of the robust controllers.
3 INTERNAL MODEL CONTROL
FOR TIME-DELAY SYSTEM
Internal Model Controller is an optimum controller
which minimizes the effect of disturbance to output
signal and considers the uncertainty of control
object. Also in this research we consider the
existence of time-delay elements. Hence most of
systems would be an unstable system due to time-
delay elements. We suggest the IMC method to
modify the stability of the system and compensate
the output signal. The main reason that we suggest
the IMC method is due to consideration of the
uncertainty of control object and time-delay
elements. The effects of disturbance to output signal
are minimized and it can be correspondence to
MIMO (Multi Input and Multi Output) and high
dimension systems. In order to modify the unstable
system due to time-delay elements, we have
designed the internal model controller. Figure 2
shows the IMC system which “D” is external
disturbance to output signal, ”K” is Internal Model
Controller, ”P”, ”H” and “
P
~
”, “
H
~
” are actual
system, actual time-delay element and model
system, approximated and predicted time-delay
element, respectively.
Figure 2: Internal Model Controller including a round trip
time-delay elements and external disturbance.
Here through figure 2 the block diagram of IMC
method, we obtained relation between output and
reference signal as follows.
dKHPHMIKrPHMy )(
11 −−
−+=
(3)
Where,
HPHHPHG
~~~
−=Δ
,
GKIM
Δ
+
=
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
200

Since, in the above equation (3) external disturbance
multiplied by “
K
H
P
HM
I
1−
−
” Which IMC
method minimizes the effect of disturbance. As a
result we consider the minimization of H
2
norm of
this coefficient. Equation (4), below, shows how to
derive “K” which is Internal Model Controller:
2
1
min KHPHMI
K
−
−
(4)
0)]
1
()
1
[(
2
1
=
∫
∞
∞−
−
−
∗−
−
∂
∂
ω
π
dKHPHMIKHPHMITr
K
[]
0
1
0
1
0)]
1
()
1
[(
2
0
2
)]
1
()
1
[(
2
1
=
−
−⇒=
−
−⇒
=
−
−
∗−
−⇒
∫
∂=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
∫∫
∞
∞−
−
−
∗−
−
∂
∂
⇒
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
KHPHMIKHPHMI
KHPHMIKHPHMITr
K
d
d
KdKHPHMIKHPHMITr
Kd
d
ω
ω
πω
QPK
1
~
−
=
(5)
Where,
Q
is stable and minimum phase filter with
condition of
IQ =)0(
.
4 UNCERTAINTY OF CONTROL
OBJECT AND TIME-DELAY
ELEMENT
In this case of IMC, we use the model of control
object and the actual control object which it is an
unknown system. So, as it obtained through equation
(4) when “K” is the inverse system of model, it is
optimum case. Although in the case of internal
model controller except the model system, it
requires to realize the predicted time-delay element.
Therefore, it has used the Pade approximation for
“
L
~
” which it is approximated time-delay i.e. time-
delay elements that it can be indicate as”
H
~
” has
shown as follows:
∑
=
∑
=
−
≈
−
==
n
k
k
s
k
L
k
c
n
k
k
s
k
L
k
c
k
Ls
enLPadeH
0
~
0
~
)1(
~
),
~
(
~
(6)
Where,
)!(!!2
!)!2(
knkn
nkn
k
c
−
−
=
for ),...,2,1.,0( nk =
Here we consider this approximated time-delay
element as a transfer matrix.
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
H
D
H
C
H
B
H
A
H
~~
~~
~
(7)
But, remember that the dimension “n” of
approximated matrix must be the same as control
object dimension. The reason of this is that in the
multiplication of two matrix systems, both of them
are required to have the same dimension,
theoretically. Because of approximated time-delay
element is considered as a system matrix.
5 NUMERICAL ANALYSIS
For evaluating the IMC method we have select our
plant as Wind Turbine System. In general, wind
turbine is located in gale area in order to generate
more energy. Therefore, observation and controlling
the attitude of outputs of wind turbine is required
from distance. Thus, in system there would be delay
elements. The process of simulation is first to
simulate the step response of closed loop system
without controller then step response of disturbances
and finally step response of system with IMC
method for non-nominal case. Here, we assume that
system has 2 seconds of delay for each time-delay
element, forward delay and feedback delay. The
linear system of WTS shown as follows:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎦
⎤
⎢
⎣
⎡
++
+
++
==
110
2
5
1
10
1
1
1
116
1
2
1
ss
s
ss
P
ceInterferen
P
ceInterferen
PP
P
θ
ω
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎦
⎤
⎢
⎣
⎡
++
+
==
52
2
10
1
0
0
120
1
~
0
0
~
~
ss
s
P
P
P
θ
ω
Actual Time-Delay Element:
22
2
×
−
= I
s
eH
22
)2,2(
~
:ionApproximat Pade
×
= IPadeH
As it is clear for actual plant, it includes some
interferences effects that is as the same as
disturbances, due to plant is MIMO system. Hereby,
the IMC proper filter set as follows:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
+Δ+
+Δ+
=
1
2
1
0
0
1
2
1
Lss
Lss
Q
Where,
LLL
~
−=Δ
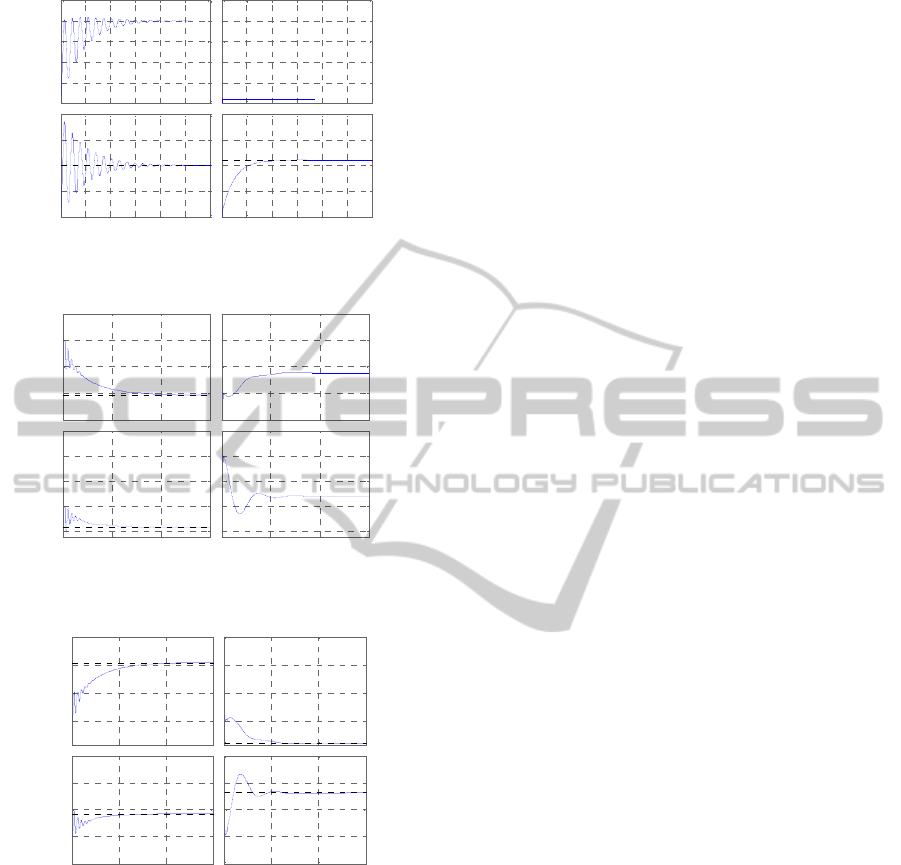
Results
From figure 3 it is clear that interference effects the
APPLICATION OF INTERNAL MODEL CONTROLLER FOR WIND TURBINE SYSTEM CONSIDERING
TIME-DELAY ELEMENT
201
0
0.5
1
1.5
2
2.5
From: In(1)
To: Out(1)
0 20 40 60 80 100 120
0
0.5
1
1.5
2
To: Out(2)
From: In( 2)
0 20 40 60 80 100 120
Step Response
Time ( s ec )
Amplitude
Figure 3: Step response without Controller.
-0.5
0
0.5
1
1.5
From: In( 1)
To: Out(1)
0 100 200 300
-0.5
0
0.5
1
1.5
To: Out(2)
From: In( 2)
0 100 200 300
Step Response
Time ( sec )
Amplitude
Figure 4: Step response of disturbance with Controller.
0
0.5
1
1.5
From: In( 1)
To: Out(1)
0 100 200 300
-0.5
0
0.5
1
1.5
To: Out(2)
From: In( 2)
0 100 200 300
Step Response
Time
(
sec
)
Amplitude
Figure 5: Step response of closed-loop with Controller.
output signal as the same as disturbances. This may
cause the instability in closed loop system.
Therefore, Internal Model Controller method is
implied. Also the step response of disturbances is
confirmed in figure 4 that it converges to zero.
Figure 5, shows the step response of IMC. It is clear
that even though the step response of closed-loop
system contain with some effects of interferences,
still it converges to reference signal. Also the effect
of disturbances is almost cancelled. However, even
though the closed-loop is stable but the performance
of system is poor due to existence interferences and
time-delay element. Therefore, for future works
interferences cancelation and reduction of time-
delay effects is required in order to improve the
closed loop performances.
6 CONCLUSIONS
In this research internal model controller stabilize
the closed-loop system including round trip delay.
However, for proposed controller it considered the
uncertainty of plant and approximated time-delay
element. Therefore, even though system is non-
nominal, internal model controller can be
corresponded. For the system’s performance it can
be adjusted with proper filter and filter it’s self
automatically adjust the damping factor by ΔL
which is uncertainty of time-delay, in other words
the IMC proper filter is a semi-adaptive filter.
However the demerit point of Internal Model
Controller is for non-nominal case the performance
of system is poor. Therefore, minimizing the
uncertainty system ΔG is become one of the
important issue. Also interference cancellation is
required in order to realize better performance.
REFERENCES
R. C. Dorf, R. H .Bishop, 2002 “Modern ControlSystem”,
Prentice Hall
Witold Pedrycz, 2007 “Robust Control Design an Optimal
control Approach” Wiley
G. F. Franklin, J.D.Powell, M.Workman, 1997,”Digital [4]
Control Dynamic System” Addison –Wesley
R. Oboe, K. Natori, K. Ohnishi, 2008, ”A Novel Structure
of Time DelayControl System with Communication
Disturbance Observe” IEEE
J. E. Normey-Rico and E.F. Camach, 2007, “Control of
dead time processes” Springer
G. Chesi, A. Garulli, A. Tesi, A. Vicino, 2009,
“Homogeneous Polynomial Forms for Robustness
Analysis of Uncertain Systems.” Springer
G. Gu, J. Chen and E. Lee “Parametric H Infinity Loop-
shaping and Weighted Mixed Sensitivity
Minimization” IEEE ’99 Transactions on Automatic
Control, Vol. 44, no. 4, pp. 846-852, 1999
Sigurd Skogestad, Ian Postlethwaite, 1996 “Multi Variabla
Feedback Control Analysis and Design” John Wiey
F .Asharif, S.Tamaki, T.Nagado, T,Nagata, M. Rashid, M.
Asharif , 2009, “Feedback Control of Linear Quadratic
Integration Including Time-Delay System” ITC-CSCC
Duncan Mc Farlane and Keith Glover “An H Infinity
Design Procedure Using Robust Stabilization of
Normalized Coprime Factors” The 27th IEEE
Conference on Decision and Control, December 1998,
No. 88CH2531-2, pp. 1343-1348
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
202
