
APPEARANCE-BASED VISUAL ODOMETRY
WITH OMNIDIRECTIONAL IMAGES
A Practical Application to Topological Mapping
Lorenzo Fern´andez, Luis Pay´a, Oscar Reinoso and Francisco Amor´os
Departamento de Ingeniera de Sistemas y Automtica, Miguel Hern´andez University
Avda. de la Universidad s/n, Alicante, Elche, Spain
Keywords:
Visual odometry, Global appearance, Omnidirectional images, Fourier descriptor, Visual compass.
Abstract:
In this paper we deal with the problem of map creation and localization of a mobile robot using omnidirectional
images. We describe a real-time algorithm for topological mapping, using as input data only a set of images
captured by a single omnidirectional camera mounted at a fixed position on the mobile robot. To compute the
topological relationships between locations in the map, we use techniques based in the global appearance of
the images. When using these methods, it is important to remove redundant information to get an acceptable
computational cost when comparing locations. With this aim, we describe each omnidirectional image by a
single Fourier descriptor that represents the appearance as well as the relative orientation between images.
This algorithm permits computing the relative topological position of a location with respect to the previous
one, acting as a visual compass. We have carried out a complete set of experiments to study the validity of
the proposed visual odometry and topological mapping and to perform an objective comparison between the
results obtained using the robot odometry, our visual odometry and the ground truth. We have also checked
the time consumption to carry out the process and the geometrical accuracy obtained comparing to the ground
truth.
1 INTRODUCTION
The design of algorithms to perform some tasks au-
tonomously in a real environment is a key point in
mobile robotics. In this field, an essential problem
to consider is the computation of the localization of
the autonomous vehicle in the environment. It is im-
portant that the mobile robot has a map or an in-
ternal representation of the environment, so that the
robot can make decisions about its localization and
about the path to follow to move from its current po-
sition to the target points. Omnidirectional vision sys-
tems are commonly used at this kind of applications
due to their relative low cost and the richness of the
information they provide. Different representations
of the visual information can be used when working
with these catadioptric systems, such as the omnidi-
rectional, panoramic and bird eye view images. In
this paper, we use the panoramic representation of the
scenes as it can offer invariance to ground-plane ro-
tations, and it allows us to use only the information
provided by the vision sensor to perform the process.
Different authors have studied how to use the om-
nidirectional images both to solve the mapping and
the localization problems. We can categorize these
solutions into two main groups:
• Feature-based solutions, in which a number of
significant points or landmarks from each image
are extracted and each point is described using
an invariant descriptor. For example, (Murillo
et al., 2007) and (Valgren and Lilienthal, 2010)
use SURF features (Bay et al., 2008) extracted
from a set of omnidirectional images to find the
localization of the robot in a given map.
• Appearance-based solutions, in which the whole
appearance of the omnidirectional image is repre-
sented by a single descriptor, with no local feature
extraction. For example (Menegatti et al., 2004b)
present a method to build a topological map us-
ing a Fourier descriptor of omnidirectional images
and (Pay´a et al., 2010) perform a probabilistic lo-
calization in some environments.
Using appearance-based techniques is useful
when working in unstructured environments and of-
fer an intuitive way to construct the map and to get
205
Fernández L., Payá L., Reinoso O. and Amorós F..
APPEARANCE-BASED VISUAL ODOMETRY WITH OMNIDIRECTIONAL IMAGES - A Practical Application to Topological Mapping.
DOI: 10.5220/0003533602050210
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 205-210
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

the position. However, as no relevant information is
extracted from the images, it is necessary to apply a
compression method to reduce the computational cost
of the mapping and localization processes. Several
researchers have developed DFT (Discrete Fourier
Transform) methods to get the most relevant infor-
mation from the images (Menegatti et al., 2004a).
These descriptors present rotational ground-plane in-
variance, concentrate the most relevant information in
the low frequency components of the transformed im-
ages and each image descriptor is computed indepen-
dently of the rest of images.
For these reasons, and based on some prior works
(Pay´a et al., 2009; Pay´a et al., 2010; Fern´andez et al.,
2010), we have decided to describe each omnidirec-
tional image by means of a Fourier descriptor. We
use the Fourier Signature (Menegatti et al., 2004a) to
compress each image captured. The processing time
needed to compute the Fourier Signature is noticeably
lower than in other common feature extraction algo-
rithms (Pay´a et al., 2009), and it permits a fast com-
parison between the images in the map by means of
a vector distance measurement. Also, when using the
Fourier Signature, we exploit better the invariance to
ground-planerotations in panoramic images, property
that will be of utmost importance when deploying our
visual compass.
In this paper we present a methodology to build
a topological map using the global appearance of the
panoramic images to model the topological relation-
ships between successive nodes in the map. We use
the Fourier Signature to get a robust descriptor that
allow us to work in real-time. However, the meth-
ods described here are independent of the descriptor
used to represent the images, and other appearance-
based descriptors may also be applied. To represent
the distance between two consecutive poses we have
used the normalized Euclidean distance between their
Fourier Signatures and to get the relative angle be-
tween them we have implemented a Fourier-based vi-
sual compass. Our main objective consists in evaluat-
ing the feasibility of using purely global-appearance
methods in these tasks and how the main features of
the descriptor influence the final result.
The paper is organized as follows. Section 2
presents the fundamentals of topological mapping ap-
proaches. In section 3, we describe the Fourier de-
scriptor and howto use it with omnidirectionalimages
to implement the visual compass. Section 4 deals with
the problem of localization and map creation using
visual odometry. Next, Section 5 presents the exper-
imental setting and the results obtained. Finally, we
present the conclusions and future work in Section 6.
2 TOPOLOGICAL MAP
BUILDING. STATE OF THE ART
With respect to the mapping problem we can establish
two approaches: metric and topological. The first one
consists in modeling the environment using a metric
map obtained with geometrical accuracy when repre-
senting the position of the robot in it. For example
(Gil et al., 2010) present an approach to carry out
the mapping process with a team of mobile robots
and visual information. On the other side, topolog-
ical mapping consists in the creation of maps that
represent graphical models of the environment that
capture places and their connectivity in a compact
form. An example of this approach is presented in
(Pay´a et al., 2010) where a topological representation
of the environment is obtained by applying a method
based on the physics of harmonic oscillators. Also,
(Tully et al., 2009) describe a probabilistic method for
topological SLAM (Simultaneous Localization and
Mapping), solving the topological graph loop-closing
problem. At last, (Fern´andez et al., 2010) describe
a Monte-Carlo Localization using the robot odome-
try and the appearance of omnidirectional images to
localize in a topological map.
Recovering relative robot poses from a set of cam-
era images has been a largely studied problem in re-
cent years. For example (Nist´er et al., 2006) present
a system that estimates the motion of a stereo head
using a feature tracker or (Scaramuzza and Siegwart,
2008) describe a real-time algorithm for computing
the ego-motion of a vehicle using as input only om-
nidirectional images and (Scaramuzza et al., 2010)
study how to close the loop by using the omnidirec-
tional visual odometry and a vocabulary tree. This
work shows how it is possible to carry out a process
of robot localization and mapping simultaneously us-
ing as input data only omnidirectional images and a
loop-closing process.
In this paper, we face the mapping problem as a
relative camera pose recovering problem, using the
overall appearance of the panoramic images, without
any feature extraction process. We describe a real-
time algorithm for computing an appearance-based
topological map through visual odometry. The main
contributions of the work are the development of a vi-
sual compass that permits computing the position and
orientation of each new location in the map, with a
low computational cost.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
206

3 FOURIER SIGNATURE
3.1 Fourier Signature
The Fourier Signature presents several advantages
among other Fourier-based methods. It is simple to
compute, it presents a low computational cost in terms
both of computation time and memory required, and it
exploits well the invariance against ground-plane ro-
tations using panoramic images (Pay´a et al., 2009).
The Fourier Signature presents the same proper-
ties as the 2D Discrete Fourier Transform. The most
important information is concentrated in the low fre-
quency components of each row, so we can work only
with the information from the k
1
first columns in the
signature (k
1
< N
y
), and its presents rotational invari-
ance when working with panoramic images. It is pos-
sible to prove that if each row of the original image
is represented by the sequence {a
n
} and each row of
the rotated image by {a
n−q
} (being q the amount of
shift), when the Fourier Transform of the shifted se-
quence is computed, we obtain the same amplitudes
A
k
than in the non-shifted sequence, and there is only
a phase change, proportional to the amount of shift q,
(Eq. 1).
F[{a
n−q
}] = A
k
exp
− j
2πql
N
y
; l = 0, .. . , N
y
− 1
(1)
Thanks to this shift theorem we can separate the
computation of the robot position and the orientation.
With this aim, we decompose the Fourier Signature of
the image I
j
∈ ℜ
N
x
,N
y
in two matrices, one contain-
ing the modules d
j
∈ ℜ
N
x
,k
1
and the other the phases
p
j
∈ ℜ
N
x
,k
2
of this signature. Finally, it is interest-
ing to highlight also that the Fourier Signature is an
inherently incremental method.
3.2 Visual Compass
Once we have studied the kind of information to store
in the database, we have to establish some relation-
ships between the stored poses to carry out the relative
camera pose recovering. When we have the Fourier
Signature of two panoramic images that have been
captured in two points that are geometrically close in
the environment, it is possible to compute their rela-
tive orientation using the shift theorem (eq. 1).
Since the Fourier Signature is invariant to ground-
plane rotations and there is a relationship between
phases of the Fourier Signature of a panoramic image
taken at one position and the phases of the Fourier
Signature of another panoramic image taken at the
same point but with different orientation (eq. 1), we
can expand this property and calculate the approxi-
mate rotation φ
t+1,t
between two panoramic images
taken on two consecutive poses. In fig. 1, v
t
is the ve-
locity of the robot at time t, v
t+1
at time t + 1 and the
relative orientation φ
t+1,t
. The angle obtained corre-
sponds to the rotation the robot has performed in the
ground-plane when going from the first to the second
point as shown in fig. 1.
To obtain φ
t+1,t
we have implemented a convolu-
tion operation between the phases of the Fourier Sig-
natures of the panoramic images of the two poses, by
applying eq. 1.
4 TOPOLOGICAL MAP
CREATION
We build a graph-based map where when a new image
is captured, a new node is added to the map, and the
topological relationships with the previous node are
computed using the global appearance information of
the scenes. With our procedure, this computation is
made online, as the robot is going through the envi-
ronment, in a simple and robust way.
We consider that our map is composed of a set of
nodes L = {l
1
, l
2
, . .. , l
N
}. Each node l
j
is represented
by an omnidirectional image I
j
∈ ℜ
N
x
,N
y
associated
and a Fourier descriptor that describes the global ap-
pearance of the omnidirectionalimage, composed of a
modules matrix d
j
∈ ℜ
N
x
,k
1
and a phases matrix p
j
∈
ℜ
N
x
,k
2
. Also, with the algorithm implemented, we can
compute the position (l
j
x
, l
j
y
) and the orientation l
j
θ
of
each node in the map thus l
j
= {(l
j
x
, l
j
y
, l
j
θ
), d
j
, p
j
, I
j
}
(fig. 1).
We consider that the robot captures a new im-
age at time t + 1 and then, the Fourier descriptors
d
t+1
and p
t+1
are computed. Comparing it with the
descriptors of the previously captured image d
t
and
p
t
we can find the topological relationships between
these two nodes. We can separate the computation
of the robot position and the orientation at time t + 1
(l
t+1
x
, l
t+1
y
, l
t+1
θ
) thanks to the shift theorem (eq. 1).
In the surroundings of the point where one image
is taken, the distance between Fourier Signatures is
approximately proportional to the actual geometrical
distance (Fern´andez et al., 2010). To compute the dif-
ference between the appearance of two scenes, we use
the Euclidean distance between the modules of the
Fourier signature. If d
i
is the Fourier signature of the
image I
i
and d
j
is the Fourier signature of the image
I
j
, then the distance between scenes i and j is:
D
i, j
=
q
∑
N
x
u=0
∑
k
1
v=0
(d
i
(u, v) − d
j
(u, v))
2
(2)
APPEARANCE-BASED VISUAL ODOMETRY WITH OMNIDIRECTIONAL IMAGES - A Practical Application to
Topological Mapping
207

On the other hand, thanks to the visual compass
implemented, we can estimate the relative orientation
between images. After this process, the position of
the current node is computed from the previous node
as:
l
t+1
x
= l
t
x
+ D
t+1,t
· cos(θ
t+1,t
) (3)
l
t+1
y
= l
t
y
+ D
t+1,t
· sin(θ
t+1,t
) (4)
l
t+1
θ
= l
t
θ
+ (φ
t+1,t
) (5)
These relationships are shown graphically in fig.
1.
Figure 1: Position and orientation of the new node in the
map computed incrementally from the previous node.
Once the topological map is built from the Vi-
sual Odometry data, we need a mechanism to test
the performance of our approach. We have decided
to evaluate how similar is the layout of the resulting
map comparing to the actual map (Ground Truth or
Real Map) of the images captured. With this aim, we
use a method based on a shape analysis, as in (Pay´a
et al., 2010). As a result of this analysis, a parameter
µ ∈ [0, 1] can be obtained. µ is a measure of the shape
correspondencebetween the sets of points where orig-
inal images were taken and the set of points in the
map. The lower is µ, the more similar are these sets.
We name this parameter shape difference along the
paper. We use this difference with the only purpose to
know the feasibility of our appearance-based Visual
Odometry, and its use is possible due to the fact that
we know the coordinates of the points in the original
map (ground truth).
5 EXPERIMENTS
To carry out the experiments, we haveused two differ-
ent sets of omnidirectional images taken from a cata-
dioptric system consisting of a CCD camera and a hy-
perbolic mirror. The first set has been captured in an
office environment, when the robot performs the tra-
jectory shown in fig. 2 (ground truth), which includes
a loop closing. This set is composed by 200 images
with a distance of 10cm between images. The second
set (fig. 3) has been captured in a laboratory environ-
ment. It is composed by 150 images and the image
acquisition has been automated so that a new image
is captured when the difference with the previous one
goes over a threshold.
Figure 2: Trajectory followed by the robot when capturing
the first set of images.
Figure 3: Trajectory followed by the robot when capturing
the second set of images.
We have designed a complete set of experiments
in order to test the validity of the global appearance-
based approach in topological map building. With this
aim, we study some features that define the feasibility
of the procedures, such as the accuracy of the map
built (how similar it is comparing to the actual map)
and the computational cost of the method.
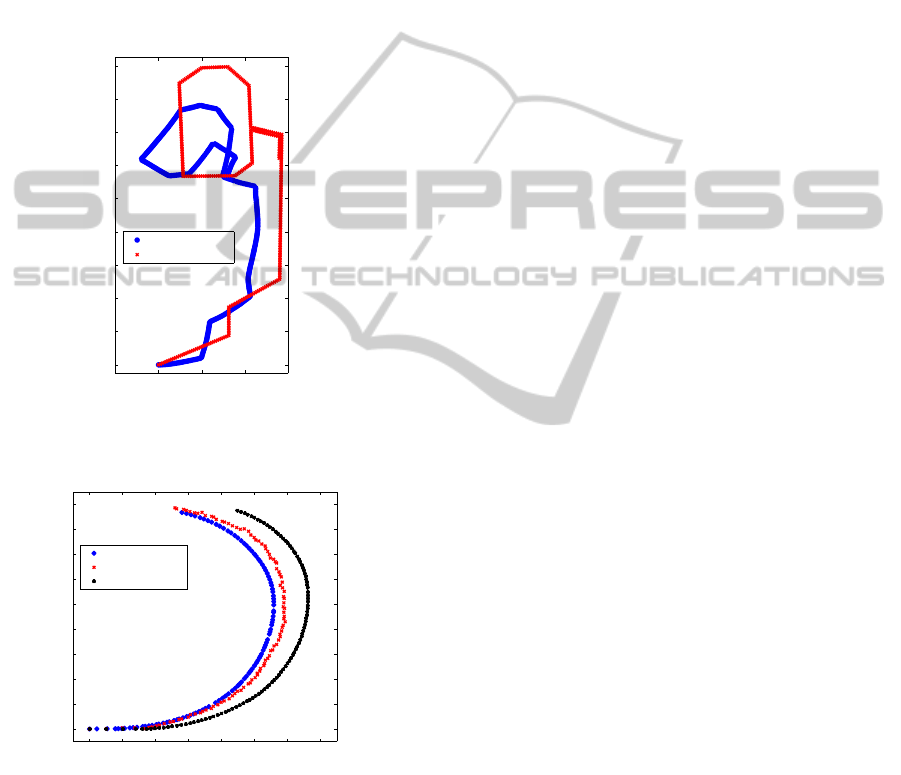
Fig. 4 shows an example of the map computed
with the first set of images and the actual map (ground
truth). This map has been built using all the images of
the set (geometrical distance between images equals
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
208
10 cm.), k
1
= 64 module components to compute dis-
tance between Fourier descriptors and k
2
= 64 phase
components used to compute relative orientations in
the visual compass. Fig. 5 shows an example with
the second set of images. The visual odometry map
has been built with all the images in the set, and
k
1
= k
2
= 64. In this case, we compare it with the ac-
tual map and with the map computed using the odom-
etry of the robot. The map obtained with our visual
odometry algorithm clearly outperforms the map ob-
tained with the odometry of the robot.
−2 0 2 4 6
0
2
4
6
8
10
12
14
16
18
X (m)
Y (m)
Visual Odometry
Ground Truth
Figure 4: Example of map built with the visual odometry
and the first set of images and ground truth.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
X (m)
Y (m)
Visual Odometry
Ground Truth
Robot Odometry
Figure 5: Example of map built with the visual odometry
and the second set of images, ground truth and map built
using the robot odometry.
In the set of experiments we have implemented
to study the performance of our algorithm, we have
tested the influence of the number of module com-
ponents to compute the distance D
t+1,t
(k
1
) and the
number of components to compute the phase differ-
ence (k
2
). We also test the influence of the geomet-
rical distance between the points where the images
were captured.
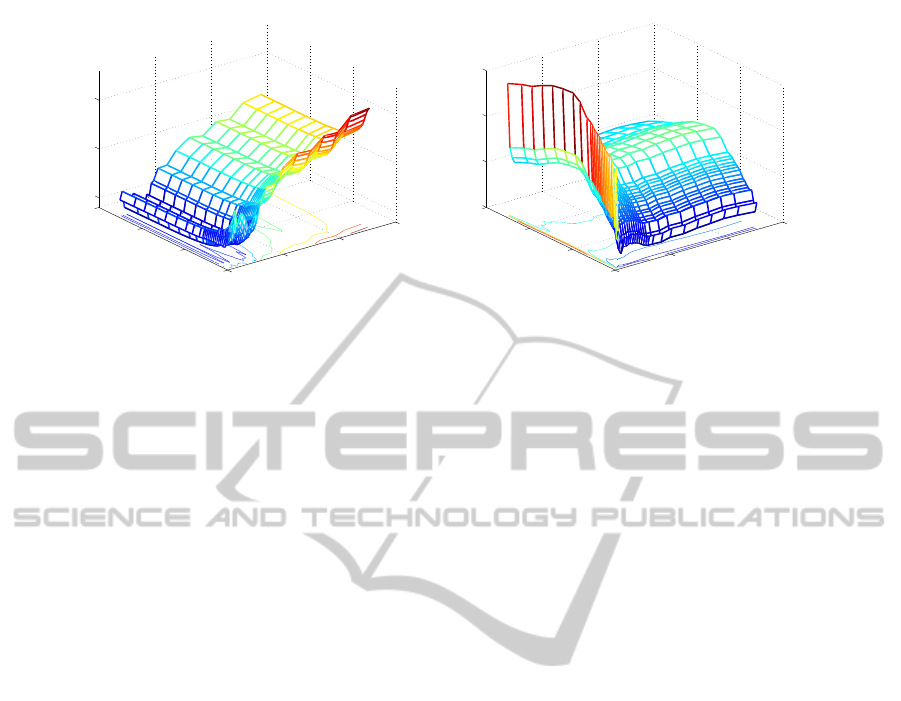
Fig. 6 (a) shows the shape difference of the re-
sulting map comparing to the actual map when using
the first set of images. Fig. 6 (b) shows the same
result when building the map with the second set of
images. When we use all the images of set 1, the min-
imum shape distance is around 0.04 when k
1
= 26 and
k
2
= 20. In set 2, this factor is 0.015 when k
1
= 4 and
k
2
= 8. The shape distance tends to increase when k
2
does, due to the fact that the first components contain
the main information so, the high frequency compo-
nent may be adding noise to the computation. As far
as k
1
is concerned, the tendency is not clear but, in
general, the shape distance is quite insensitive to this
parameter.
To test the feasibility of the method presented to
work in real time, we performed a series of experi-
ments in which we obtained the average time needed
at each step depending on the number of components
both in magnitude (k
1
) and phase (k
2
). When we use
all the images of set 1, the averagetime needed at each
step to place the new location in the map is around
0.153 seconds when k
1
= 26 and k
2
= 20. In set 2,
this factor is 0.054 seconds when k
1
= 4 and k
2
= 8.
6 CONCLUSIONS
In this paper we have studied the applicability of the
approaches based on the global appearance of omni-
directional images in topological mapping, using a set
of images a robot has captured when traversing a tra-
jectory in an environment. The main contributions of
the paper include the development of a visual com-
pass that allows building a map of the environment
online, while the robot is going through the environ-
ment, the development of a method to compare the
accuracy of the layout of the map computed and the
study of the influence of the parameters of the pro-
cess both in the layout of the resulting map and in the
processing time.
All the experiments have been carried out with
two sets of omnidirectionalimages captured by a cata-
dioptric system mounted on the mobile robot. Each
scene is described through a Fourier-based signature
that presents a good performance in terms of amount
of memory and processing time, and it is also invari-
ant to ground-plane rotations and an inherently incre-
mental method.
We present a methodology to build graph-based
maps of the environment. As we use a topological
approach, these maps represent the real world except
for a scale factor and a rotation. To make an homo-
geneous comparison between the map computed and
APPEARANCE-BASED VISUAL ODOMETRY WITH OMNIDIRECTIONAL IMAGES - A Practical Application to
Topological Mapping
209
0
50
100
150
0
50
100
150
0.05
0.1
0.15
k
2
k
1
µ
(a)
0
50
100
150
0
50
100
150
0.014
0.016
0.018
0.02
k
2
k
1
µ
(b)
Figure 6: Shape difference versus number of module components (k
1
) and phase components (k
2
) for (a) the set of images 1
and (b) the set of images 2.
the real map, we have developed a method based in
the Procrustes analysis. As shown in the results, when
the parameters of the system are correctly tuned, ac-
curate results can be obtained, maintaining a reason-
able computational cost.
We are now working in this approach to build a
topological SLAM algorithm (Simultaneous Local-
ization and Map Building) using just the global ap-
pearance of omnidirectionalimages and different map
topologies.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish govern-
ment through the project DPI2010-15308. ”Explo-
raci´on Integrada de Entornos Mediante Robots Co-
operativos para la Creaci´on de Mapas 3D Visuales y
Topol´ogicos que Puedan ser Usados en Navegaci´on
con 6 Grados de Libertad”.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Speeded-up robust features (surf). In Comput. Vis. Im-
age Underst.
Fern´andez, L., Gil, A., Pay´a, L., and Reinoso, O. (2010).
An evaluation of weighting methods for appearance-
based monte carlo localization using omnidirectional
images. In Proc. of Workshop on Omnidirectional
Robot Vision ICRA.
Gil, A., Reinoso, O., Ballesta, M., Juli´a, M., and Pay´a, L.
(2010). Estimation of visual maps with a robot net-
work equipped with vision sensors. Sensors.
Menegatti, E., Maeda, T., and Ishiguro, H. (2004a). Image-
based memory for robot navigation using properties of
omnidirectional images. Robot. Auton. Syst.
Menegatti, E., Zoccarato, M., Pagello, E., and Ishiguro, H.
(2004b). Image-based monte-carlo localisation with
omnidirectional images. In Robot. Auton. Sys.
Murillo, A. C., Guerrero, J. J., and Sagues, C. (2007). Surf
features for efficient robot localization with omnidi-
rectional images. In Proc. of ICRA.
Nist´er, D., Naroditsky, O., and Bergen, J. (2006). Visual
odometry for ground vehicle applications. Journal of
Field Robot.
Pay´a, L., Fern´andez, L., Gil, A., and Reinoso, O. (2010).
Map building and monte carlo localization using
global appearance of omnidirectional images. Sen-
sors.
Pay´a, L., Fern´andez, L., Reinoso,
´
O., Gil, A., and
´
Ubeda,
D. (2009). Appearance-based dense maps creation. In
Proc. of ICINCO.
Scaramuzza, D., Fraundorfer, F., and Pollefeys, M. (2010).
Closing the loop in appearance-guided omnidirec-
tional visual odometry by using vocabulary trees.
Robot. Auton. Syst.
Scaramuzza, D. and Siegwart, R. (2008). Appearance-
guided monocular omnidirectional visual odometry
for outdoor ground vehicles. IEEE Trans. on Robot.
Tully, S., Kantor, G., Choset, H., and Werner, F. (2009). A
multi-hypothesis topological slam approach for loop
closing on edge-ordered graphs. In Proc. of IEEE/RSJ.
Valgren, C. and Lilienthal, A. (2010). Sift, surf and seasons:
Appearance-based long-term localization in outdoor
environments. In Robot. Auton. Sys.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
210
