
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS
CONSIDERING CONTROL INPUT
AND ENVIRONMENTAL INFORMATION
Yu Ishihara
Graduate School of Science and Technology, Keio University, 3-14-1, Hiyoshi, Kohoku-ku, Yokohama, Japan
Masaki Takahashi
Department of System Design Engineering, Keio University, 3-14-1, Hiyoshi, Kohoku-ku, Yokohama, Japan
Keywords: Powered Wheelchair, Human Robot Interaction, Corridor Detection.
Abstract: Powered wheelchair is a mobility commonly used for people with disabilities. Recently, to improve the
safety and efficiency of powered wheelchairs, various systems with control assistance are proposed.
However most of the systems suppose joystick as input device and doesn’t consider about people with
difficulties using it. Not all devices alternative to joystick have enough operability compared to joystick. In
this paper, considering corridor passing as verification environment, an action control method to drive
through the corridor safely and efficiently for wheelchairs controlled by devices with low operability is
presented. To achieve safe and efficient driving, proposed method considers the time series of passenger’s
input commands and combines the environmental information to select effective direction and speed for the
wheelchair instead of passenger. Moreover for environment recognition, corridor detection algorithm is also
proposed. To verify the effectiveness of proposed method, simulations and experiments were carried out.
1 INTRODUCTION
Recently, the number of wheelchair users is
increasing at an average annual rate of 5.9 % a year
and who have benefit from smart wheelchair,
wheelchair with assist facility, is estimated as 61 to
91 % of all wheelchair users (Simpson, 2008).
Hence assist facility is becoming one of the
important features for users with disabilities that find
difficulties in operating existing powered
wheelchairs. In order to facilitate the operation,
several wheelchairs were developed with obstacle
avoidance methods and/or passenger’s intention
estimation so far and their effectiveness were
verified (Levine, 1999); (Iturrate, 2009). Though
most of the previous methods were focused on the
wheelchair controlled by joystick and didn’t
consider people with difficulties using joystick: e.g.
people with handicaps on upper limbs. Therefore
wheelchairs enabled to control by devices alternative
to joystick such as voice command (Simpson, 2002),
face recognition (Saitoh, 2007) and brain machine
interface (BMI) (Vanacker, 2007); (Iturrate, 2009)
are recently proposed. However most of these
devices don’t have enough operability, low
operating frequency, few input direction and
uncertainty of information, compared to joysticks
and needs further assist to establish safe and
efficient control of wheelchair as shown in Figure 1.
Previously, two approaches are proposed to
control the wheelchair with low operability devices
(Vanaker, 2007); (Iturrate, 2009). One is automatic
navigation and the other is implementation of
existing approaches. Automatic navigation allows
the passenger not to control directly the wheelchair.
Though this approach limits the wheelchairs travel
range of passenger as the navigation needs the map
of environment preliminary. And implementation of
existing methods enable to control the wheelchair
safely but its efficiency is not same as that of
joystick. For example, it is reported that the
wheelchair controlled by BMI has difficulty in
driving the wheelchair as shown in Figure 2
(Vanaker, 2007).
28
Ishihara Y. and Takahashi M..
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS CONSIDERING CONTROL INPUT AND ENVIRONMENTAL INFORMATION.
DOI: 10.5220/0003534500280036
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 28-36
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: The relationship between the operability of
device and necessity of assist facility.
Figure 2: Inefficient driving of wheelchair by brain
machine interface due to the low operability.
Therefore in order to control the wheelchair with
devices alternative to joystick safely and efficiently,
the assist facility has to take care of the features of
the device and needs further assist of passenger’s
operation during the travel. More specifically, to
achieve efficient and safe control of wheelchair
without environmental constraint, reactive action
control that comprises the devices’ limitations is
necessary.
In this paper, regarding corridor passing as a
general task for wheelchair users, a new action
control method to drive through the corridor safely
and efficiently by devices with low operability is
presented. For simplicity, we suppose that the input
information doesn’t have uncertainty. Particularly,
we consider for the next two points:
(a) Deceleration before entering to the cross roads
(b) Smooth and efficient turns to change direction
(a) is to improve the safety of passenger from the
undetectable moving objects shield by the walls like
in Figure 3 and for the difficulty of keeping
particular speed using low operability devices. (b) is
to achieve efficient driving and to prevent from
stopping at all times changing direction.
To achieve the points mentioned above, we propose
a corridor detection algorithm and an action control
method that simultaneously considers control input
and environmental information. The wheelchair first
considers the time series of passenger’s inputs to
deal with the low frequency and decides roughly the
moving direction. Next, by combining the
environmental information with decided direction,
proposed method analyze the passenger’s intention
and selects effective direction and speed for the
wheelchair instead of passenger. Finally combining
the selected direction and speed with obstacle
avoidance methods, proposed method realizes safe
and efficient driving of wheelchair. To verify the
effectiveness of the proposed method, several
Figure 3: Example situation that deceleration is needed.
Figure 4: Flowchart of proposed algorithm.
simulations and experiments were carried out.
2 CONTROL SYSTEM
OF WHEELCHAIR
The control system of wheelchair consists of three
steps, corridor detection, evaluation of input
commands and action control. The flowchart of our
proposed method is shown in Figure 4. By
considering the input commands of passenger and
environmental information such as corridors and
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS CONSIDERING CONTROL INPUT AND
ENVIRONMENTAL INFORMATION
29

obstacles to decide the action, the system achieves
safe and efficient driving of wheelchair. The design
method of each step is described in following
sections.
Figure 5: Corridor detection.
2.1 Corridor Detection
To achieve the two functions mentioned in section 1,
the proposed method detects the corridors. We
developed a corridor detection algorithm based on
leg detection algorithm that uses laser range finder
(LRF) (Belloto, 2009). First, it searches for the
edges as shown in Figure 5 from the LRF data using
next equation:
1ii th
ll e
(1)
Where
i
l
is the
i
th data of LRF and
th
e
is the
threshold. If the equation is satisfied, we assume the
i
th data corresponds to the edge. After edges are
detected, proposed method calculates the width
w
between detected edges by following equation:
1
j
res j j
wl r i i
(2)
Where
j
l
is the distance between the wheelchair
and
j th detected edge,
res
r
is the angular resolution
of LRF and
1
j
j
ii
is the number of scanned point
between detected edges. Using the threshold
th
w
, if
th
ww
, we assumed the space between detected
edges corresponds to a corridor.
In this paper, thresholds
th
e
and
th
w
is set to 0.1 m
and 0.3 m. These are set according to the parameter
study to detect the corridors 2 m backward from it.
2.2 Evaluation of Input
To decide the moving direction roughly, the time
series of input commands is considered. In this
paper, we refer non-invasive BMIs as input device
and assume that only three different directions
(Forward, Left and Right) is fed to the wheelchair
(Millan, 2004). The operating frequency of BMI is
set to 2 Hz. The aim of this process is to select the
passenger’s intention, considering the inputting
error, such as turn and change the direction or go
straight ahead. To measure the intention we use the
following index:
00
00
() ()
() ()
Memory Memory
LL
tnnn
nn
Memory Memory
RR
tnnn
nn
RRtIRt
RRtIRt
(3)
This index is first proposed for mobile robots to
measure the reliability of information and
()
n
Rt
is
the forgetting function based on the experimental
results on human short-term memory in psychology
field (Fujii, 2005). As this function is based on the
human’s short-term memory, we expect to achieve
intuitive driving of the wheelchair. Suffixes
L and
R indicates “Left” and “Right”. The formulation of
the forgetting function
R
is as follows:
() exp( )
1.0 0.3595
Rt A Bt
AB
(4)
The
L
n
I
and
R
n
I
in equation (3) represents the input
from the device and is defined as follows:
1
0
1
0
L
n
R
n
if input is left
I
otherwise
if input is right
I
otherwise
(5)
Therefore we can decide whether the passenger
wants to go straight ahead or turn and change
direction as the
L
t
R
or
R
t
R
becomes large when the
left or right side input is fed to the wheelchair
continually. In this paper, we set
th
R
as threshold
and if the index became larger than the
th
R
we
decide that the passenger wants to change direction.
2.3 Action Control
The action control of the wheelchair is achieved
using fuzzy potential method (FPM) (Tsuzaki,
2003). In FPM, command velocity is generated by
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
30
integrating the element actions represented as
potential membership functions (PMFs). PMF is a
function that its horizontal axis represents the
traveling direction which is from -180 deg to 180
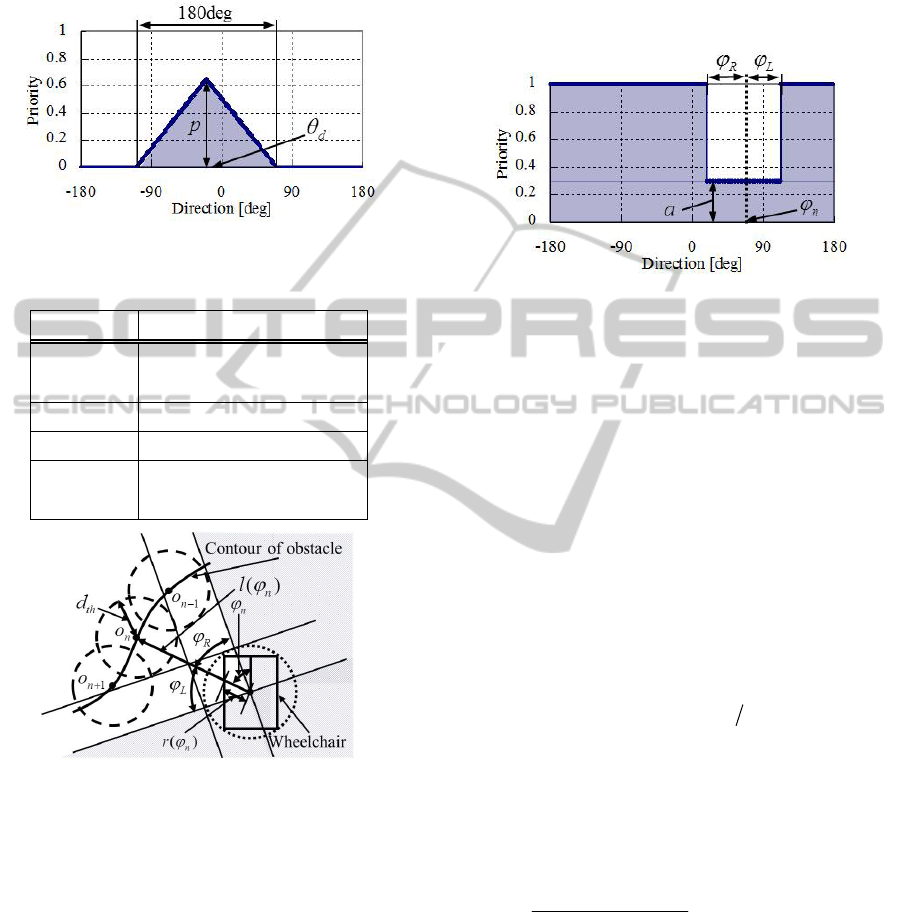
Figure 6: Example PMF for a desired direction.
Table 1: Key assignment.
Input
t
p
Forward
11
0.1 1.0
1.0
tt
t
pifp
p
otherwise
Left
1tt
p
p
Right
1tt
p
p
No input
11
0.1 0.0
0.0
tt
t
pifp
p
otherwise
Figure 7: Relation between wheelchair and obstacle.
deg measured from the front of wheelchair and
vertical axis represents the priority for each direction.
In this paper, three PMFs, for going to the desired
direction, to avoid obstacles and to consider
passengers intention are designed. The design
method of PMFs is described in following sections.
2.3.1 PMF for Going to the Desired
Direction
To go to the desired direction, a triangular PMF
d
is generated, as shown in Figure 6.
d
is specified by
the priority
t
p
at time t and
d
. These parameters
are determined by Table 1 and following equation:
0.0
LR
cttth
d
if R or R R
otherwise
(6)
Figure 8: Example PMF for avoiding obstacles.
Where
c
is the direction of detected corridors on
the way which passenger wants to turn: i.e. if
L
R
tt
RR the leftward and if
R
L
tt
RR the rightward.
In case corridor isn’t detected and the equation is
satisfied,
c
is set to
45deg
.
2.3.2 PMF for Avoiding Obstacles
To avoid obstacle, PMF
o
is generated. First, using
the distance data from wheelchair to obstacles by
LRF, the direction not to collide to obstacles,
R
and
L
in Figure 7, considering the margin
th
d
from
the
n
th scanned point is calculated.
arcsin ( ) ( )
R L wheel th n
rdl
(7)
Next, using the calculated directions, the PMF
n
o
for
n
th scanned point is generated like in Figure
6. The priority
a
of PMF in Figure 8 is decided
using following equation.
(( ) ( ))
()
(())
1.0
nth n
nth
th th n
ldr
if l l
ldr
a
otherwise
(8)
Finally, the PMF
o
is calculated as a logical
sum of all PMF for each scanned point.
1 N
oo o
(9)
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS CONSIDERING CONTROL INPUT AND
ENVIRONMENTAL INFORMATION
31

2.3.3 PMF to Consider Passenger’s
Intention
To consider passenger’s intention, PMF
OR
is
generated as shown in Figure 9. The aim of this
PMF is to restrict wheelchair from moving to the
opposite direction of passenger’s intention while
Figure 9: Example PMF to consider passenger’s intention.
avoiding the obstacles.
b
and
c
shown in Figure 9
is calculated as follows:
0.0 0
1.0
0.0 0
1.0
LR
tt
RL
tt
if R R
b
otherwise
if R R
c
otherwise
(10)
2.3.4 Integration of PMFs and Calculation
of Command Velocity
FPM integrates the PMFs to calculate the command
velocity. The integrated PMF
mix
is calculated by
logical product of the PMFs designed in previous
sections as follows:
mix d o OR
(11)
Finally, by defuzzifier, the command velocity is
calculated as a traveling direction
out
and an
absolute value of the reference speed of the
wheelchair from the integrated PMF
mix
.
out
is
decided as the direction that makes the PMF
()
mix
maximum. Based on
out
, the traveling
speed
out
v is calculated by following equation:
max min max
()( )
tmixout
vvvv
(12)
1
1
1exp( (2 0.5))
out t
out
vv
(13)
Where
max
v and
min
v
are the upper and lower limits
of the wheelchair speed. In this paper, we assume
that the wheelchair’s maximum acceleration is 0.5
m/s
2
and
max
v is set to 0.75 m/s while the corridors
are not detected on the left and right side of the
Figure 10: Simulation result of straight driving.
wheelchair and otherwise 0.25 m/s. 0.75 m/s is the
speed that is able to decelerate to 0.25 m/s when the
maximum acceleration of the wheelchair is 0.5 m/s
2
in 2 m of braking distance.
min
v is set to 0.0 m/s.
Moreover, to turn efficiently, proposed method
limits the output according to the
out
using the
sigmoid function shown in equation (13). In this
paper, the parameter
is set to
25
.
3 SIMULATION
To verify the effectiveness of the proposed method,
numerical simulations were carried out. The
wheelchair size is set to L 1.05 × W 0.65 m. In order
to recognize the environment, we assumed that a
LRF is loaded on the center of wheelchair. The
measuring range of LRF is 4.0 m from -120 deg to
120 deg.
th
I
is set to 0.25 and the margin from
obstacles
th
d
is set to 0.3 m. In all simulations, the
initial position of the wheelchair is set to (0 m, 0 m).
Width of corridors is 2 m and the center of cross
road is (0.0 m, 6.0 m). The interval of grids in the
figures is 1 m. The commands of passenger are
simulated by keyboard input with operating
frequency of 2 Hz and the numbers 0 to 3 of the
input command corresponds to “0: No signal”, “1:
Forward”, “2: Left”, and “3: Right”.
3.1 Straight Driving
Figures 10 to 12 show the trajectory of wheelchair,
input commands and speed of wheelchair in straight
driving. From these results, it is verified that the
proposed method accelerates and decelerates
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
32

automatically while driving the wheelchair.
Especially, while the corridor was detected,
Figure 11: The input commands in straight driving.
Figure 12: Speed of wheelchair in straight driving.
proposed method decelerates the wheelchair for safe
driving considering the undetectable moving objects
shield by the walls. By this simulation, it was
confirmed that the proposed method realizes safe
driving of wheelchair with simple input commands
in straight driving.
3.2 Direction Change
Figure 13 shows the trajectory of wheelchair with
proposed method and Figure 14 shows the trajectory
with conventional method in direction change. The
input command that was given to the wheelchair in
both methods is shown in Figure 15. Figure 16
shows the yaw angle of wheelchair in direction
change with proposed method. From the results in
Figures 13, 15 and 16, it was confirmed that
proposed method enables the passenger to change
the direction smoothly by detecting the corridors,
analyzing the input commands and directing the
wheelchair to the corridor. On the other hand, as
shown in Figure 14, as the correspondence of input
commands and the travelling direction was one-to-
one which was not suitable for turning, the
conventional method, without navigation to the
corridors, failed to change the direction and stopped.
Moreover, in case an unintended input is fed to the
wheelchair, the wheelchair with conventional
method swings as the time series of input is not
(a) Overview (b) Enlarged view
Figure 13: Simulation result in direction change with
proposed method.
(a) Overview (b) Enlarged view
Figure 14: Simulation result in direction change with
conventional method.
Figure 15: The input commands in direction change.
Figure 16: Yaw angle of wheelchair in direction change.
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS CONSIDERING CONTROL INPUT AND
ENVIRONMENTAL INFORMATION
33

Figure 17: Simulation result of obstacle avoidance during
straight driving.
Figure 18: The input commands while avoiding obstacles
during straight driving.
Figure 19: Speed of wheelchair while avoiding obstacles
during straight driving.
considered. Therefore it is verified that the
automatic navigation is effective for the wheelchairs
controlled by low operability devices to change
direction and it realizes smooth changing the
direction without useless stopping inside the cross
road.
3.3 Obstacle Avoidance
To verify the effectiveness of proposed method
while avoiding the obstacles, two simulations were
carried out. In the simulation two obstacles is placed
in the corridor. One is placed in (-0.7 m, 3.0 m) and
Figure 20: Simulation result of obstacle avoidance during
direction change.
Figure 21: The input commands while avoiding obstacles
during direction change.
Figure 22: Yaw angle of wheelchair while avoiding
obstacles during direction change.
the other is placed in (0.5 m, 6.0 m). The radius of
obstacle is set to 0.2 m. Figures 17 to 19 show the
trajectory of wheelchair, input commands and speed
of wheelchair in straight driving with obstacles in
the corridor. From these results, it is verified that
proposed method achieves safe driving of
wheelchair maintaining the distance from obstacles
and automatic control of velocity with simple input
commands. Especially, at 6.6 s, though the obstacle
is not placed in the travelling direction and the
passenger commands to go straight ahead, the
wheelchair automatically avoided the obstacle to
maintain the safe distance.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
34

Figure 23: Overview of wheelchair.
Figure 24: The experiment environment.
Moreover, the wheelchair analyzed the left-side
input of 20.1 s as the input is not long enough for
changing the direction. As a result, the wheelchair
avoided the obstacle from its left side instead of
changing the direction to the left.
Figures 20 to 22 show the trajectory of
wheelchair, input commands and yaw angle of
wheelchair in direction change with obstacles in the
corridor. From this simulation, by analyzing the time
series of input commands, instead of avoiding the
obstacle and going forward, the wheelchair turned
smoothly and changed its direction maintaining the
distance from obstacles. From these results, it is
verified that by analyzing the input commands and
considering the environmental information, the
proposed method achieves safe and efficient driving
of wheelchair, controlled by low operability devices,
in general corridor passing situations without
complex commands.
4 EXPERIMENT
4.1 Experiment Environment
To verify the effectiveness of proposed method in
real environment, experiment with real wheelchair
was carried out. The wheelchair is YAMAHA JWX-
1 with a HOKUYO URG04-LX LRF on the front of
wheelchair to detect corridors and obstacles. Figure
23 shows the overview of wheelchair.
Figure 25: The input commands during the experiment.
Figure 26: Experiment result of direction change (back).
Figure 27: Experiment result of direction change (side).
LRF used in the experiment has 4 m of measurement
range from 120 deg to -120 deg. The control of
wheelchair is achieved with a laptop PC with
Centrino-Duo CPU 2.0 GHz. The size of wheelchair
is L 1.05×W 0.65 m. The maximum speed of
wheelchair is set to 0.5 m/s. The input commands
are given to the wheelchair by keyboard manually
with operating frequency of 2 Hz. Figure 24 shows
the experiment environment.
4.2 Experiment Result
Figure 25 shows the input command that was given
to the wheelchair during the experiment and Figures
26 and 27 show the experiment result from different
view angles. From these results, it was confirmed
ACTION CONTROL METHOD FOR POWERED WHEELCHAIRS CONSIDERING CONTROL INPUT AND
ENVIRONMENTAL INFORMATION
35

that proposed method automatically analyze the
passenger’s objective and changes the wheelchair’s
direction without complex commands. Moreover, it
was verified that the proposed method achieves safe
and smooth driving of wheelchair also in real
environment by considering the passenger’s control
input and environmental information simultaneously
while driving through the corridors.
5 CONCLUSIONS
In this paper, to control the wheelchair with devices
alternative to joystick safely and efficiently, a novel
action control method for powered wheelchairs
controlled by low operability device, low operating
frequency and few input direction, is proposed.
In order to achieve safe and efficient action while
driving the corridors, the proposed method considers
the time series of input commands and
environmental information simultaneously.
Moreover, to detect the corridors, a corridor
detection algorithm is also proposed. Through the
numerical simulation and experiment, efficient and
safe driving of wheelchair, efficient turns to change
the direction in cross roads and safe driving with
automatic control of velocity was achieved by
proposed method and its effectiveness was verified.
REFERENCES
Simpson, R., LoPresti E., Cooper R., 2008. How many
people would benefit from a smart wheelchair?.
Journal of Rehabilitation Research & Development.
Levine, S., Bell D., Jaros L., Simpson R., Koren Y.,
Borenstein J., 1999. The NavChair Assistive
Wheelchair Navigation System. IEEE Transaction on
Rehabilitation Engineering, vol. 7, No. 4, pp. 443-451.
Simpson, R. and Levine S., 2002. Voice Control of a
Powered Wheelchair. IEEE Trans. on Neural Systems
and Rehabilitation Engineering, vol. 10, No. 2, pp.
122-125.
Saitoh, T., Takahashi N., Konishi R., 2007. Development
of an Intelligent Wheelchair with Visual Oral Motion.
IEEE International Conference on Robot & Human
Interactive Communication, pp. 145-150.
Vanacker, G., Millan J., Lew E., Ferrez P., Moles F.,
Philips J., Brussel H., Nuttin M., 2007. Context-Based
Filtering for Assisted Brain-Actuated Wheelchair
Driving. Computational Intelligence and Neuroscience
Volume 2007, pp. 1-12.
Iturrate, I., Antelis J., Kubler A., Minguez J., 2009. A
Noninvasive Brain-Actuated Wheelchair Based on a
P300 Neurophysiological Protocol and Automated
Navigation. IEEE Transaction on Robotics, Vol. 25,
No. 3, pp. 614-627.
Millan J., Renkens F., Mourino J., Gerstner W., 2004.
Noninvasive Brain-Actuated Control of a Mobile
Robot by Human EEG. IEEE Transaction on
Biomediacl Engineering, Vol. 51, No. 6, pp. 1026-
1033
Fujii, H. and Yoshida K., 2005. Action Control Method
for Mobile Robot Considering Uncertainty of
Information. IEEE/RSJ International Conference on
Intelligent Robots and Systems, pp. 3915-3920.
Belloto, N. and Hu H., 2009. Multisensor-Based Human
Detection and Tracking for Mobile Service Robots.
IEEE Transaction on Systems, Man, and Cybernetics-
Part B: Cybernetics, Vol. 39, No. 1, pp. 167-181.
Tsuzaki, R. and Yoshida K., 2003. Motion Control Based
on Fuzzy Potential Method for Autonomous Mobile
Robot with Omnidirectional Vision. Journal of the
Robotics Society of Japan, Vol. 21, No. 6, pp. 656-662.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
36
