
FURTHER REMARKS ON INVARIANCE PROPERTIES OF
TIME-DELAY AND SWITCHING SYSTEMS
Nikola Stankovi´c, Sorin Olaru
SUPELEC System Sciences (E3S), Automatic Control Department, Gif-sur-Yvette, France
Silviu-Iulian Niculescu
L2S - Laboratory of Signals and Systems, SUPELEC - CNRS, Gif-sur-Yvette, France
Keywords:
Minimal invariant sets, Switching systems, Time-delay systems.
Abstract:
The present paper deals with correlation in the context of mRPI sets between discrete linear systems affected
by time delay and switching systems. Existence and uniqueness of mRPI set for both systems are studied.
One of the possible construction procedures of invariant approximations of mRPI set is also outlined. In order
to keep this exposure as coherent as possible, all results are firstly consider separately for both cases. Special
attention is put on the link between obtained results. An illustrative example is provided at the end.
1 INTRODUCTION
Time delay is often the essential property of the dy-
namic systems, primarily due to the transport and
transfer phenomena (materials, energy, informations)
(Sipahi et al., 2011), (Niculescu, 2001). Delay sys-
tems could be also affected by exogenous, additive
disturbance input. For this problem, employing the
invariant set theory could be of great help in analysis
and synthesis as long as it provides useful informa-
tion about limit behavior and the contractive proper-
ties (Lombardi et al., 2011).
In this study we consider delay systems with additive
disturbance w
k
and fixed delay d ∈ Z
+
(d is positive
integer), described by following linear delay differ-
ence equation in state-space:
Σ
d
: x
k+1
= A
0
x
k
+ A
d
x
k−d
+ w
k
. (1)
Invariant sets (in particular positive invariant sets)
have received increased attention in automatic control
recently, especially in constrained and robust control.
When the considered system is autonomous and lin-
ear with bounded additive disturbance, one of the is-
sues is the characterization and the computation of the
minimal robust positive invariant set (Kolmanovsky
and Gilbert, 1998). This set can be observed as the
set of states that can be reached from the origin un-
der bounded disturbance signal (often referred as 0-
reachable set (Blanchini and Miani, 2008)). From
previous results in the field, it is well-known that by
lifting dynamics to the space of sets and using con-
tractive set-iterations is possible to construct invariant
approximations of mRPI set very elegantly (Artstein
and Rakovic, 2008). For this purpose we will mostly
use polyhedral sets, since they have an advantage to
follow shape of limit sets more precisely, in spite of
their computational complexity.
Switching systems are a particular group of sys-
tems that could be described as finite number of in-
dependent dynamics, represented by its differential
equation, combined by means of switching signal
(Liberzon, 2003). At all instance of time, switching
signal determines which of a finite dynamics is cur-
rently active. In this work we will particularly fo-
cus on the switching systems for which stability is
not affected by admissible switching function (arbi-
trary switching case). Switching system considered
in present study is given by subsequent linear differ-
ence equation in state-space:
Σ
s
: x
k+1
= A
i
x
k
+ w
k
, (2)
where i : Z
+
→ {0,d} is switching signal.
In both cases, Σ
d
and Σ
s
, we assume that distur-
bance is uniformly distributed and takes values from
compact and convex set W with 0 in its interior.
The main goal of our study is to point out a cer-
tain correlation, from the set theoretic point of view,
between mRPI sets for systems affected by time delay
and switching dynamics.
357
Stankovi
´
c N., Olaru S. and Niculescu S..
FURTHER REMARKS ON INVARIANCE PROPERTIES OF TIME-DELAY AND SWITCHING SYSTEMS.
DOI: 10.5220/0003537103570362
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 357-362
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

The remaining paper is organized as follows: Sec-
tion 2 includes some preliminary results and related
background material. In Section 3 we introduce the
main results of the paper. Section 4 provides illustra-
tive examples while concluding remarks are outlined
in Section 5.
Notation
Throughout present study sets of real numbers,
non-negative real numbers, integers and non-negative
integers are denoted by R, R
+
, Z and Z
+
, respec-
tively. For a matrix M ∈ R
n×n
, ρ(M) stands for the
largest absolute value of its eigenvalues. Thus, the
spectral norm σ(A) is defined as σ(A) :=
p
ρ(A
T
A).
For two sets X ⊂ R
n
, Y ⊂ R
n
and vectors x ∈ R
n
,
y ∈ R
n
set addition (Minkowski sum) is defined as
X ⊕Y := {x+ y | x ∈ X,y ∈ Y} while set product is
defined as X ×Y := {(x,y) | x ∈ X,y ∈ Y}. For a
given set X and a real matrix (or a scalar) M of com-
patible dimensions, we define MX := {Mx | x ∈ X}.
Set obtained as the intersection of finite number of
open and/or closed half-spaces is a polyhedral set
while closed and bounded polyhedral set will be re-
ferred as polytope. A set X ⊂ R
n
is 0-symmetric set
if holds X = −X.
For two arbitrary vectors x and y, the p-norm distance
d is defined as d(x,y) = (Σ
n
i=1
|x
i
− y
i
|
p
)
1/p
. For two
non-empty sets X and Y, the Hausdorff distance is
defined as d
H
(X,Y) := min
α
{α | X ⊆ Y ⊕ αL,Y ⊆
X ⊕ αL}, where L is a given symmetric, compact and
convex set with 0 in its interior. For some ε > 0 we
denote B
n
p
(ε) = {x ∈ R
n
| kxk
p
≤ ε}.
2 PRELIMINARIES AND
PREREQUISITES
Present paper relies on following standard results in
the literature (Blanchini and Miani, 2008):
Lemma 1 (Banach fixed point theorem). Let
(X,d(·,·)) be a complete metric space and let f(·) :
X → X be a contractive function with contraction fac-
tor λ ∈ [0,1) that is
d( f(x), f(y)) ≤ λd(x,y), λ ∈ [0,1)
holds for all x,y ∈ X. Then there exists exactly one
point ¯x ∈ X such that f( ¯x) = ¯x.
Lemma 2. Let X,Y and Z be convex and compact sets
with 0 in its interior, α, β are real parameters such
that α ≥ β > 0 and M is a matrix of appropriate di-
mension. Then: X ⊕ Y = Y ⊕ X, (X ⊕Y) ⊕ Z = X ⊕
(Y ⊕Z), αX ⊕βX = (α+β)X, M(X ⊕Y) = MX ⊕MY
and X ⊆ Y ⇔ X ⊕ Z ⊆ Y ⊕ Z.
In the sequel we will use the following definition.
Definition 1 (Robust positively invariant (RPI) set).
(i) A set Φ
d
⊂ R
n
is a RPI set for the system Σ
d
(1)
with all initial conditions x
−i
∈ Φ
d
, i ∈ Z
[0,d]
, if
and only if x
k
∈ Φ
d
, for ∀k ∈ Z
+
and ∀w ∈ W
(alternatively in set-theoretic framework A
0
Φ
d
⊕
A
d
Φ
d
⊕W ⊆ Φ
d
).
(ii) A set Φ
s
⊂ R
n
is a RPI set for the system Σ
s
(2)
if and only if x
k
∈ Φ
s
for ∀k ∈ Z
+
, ∀w ∈ W and
for all switchings i (alternatively in set-theoretic
framework {A
0
Φ
s
⊕W}
S
{A
d
Φ
s
⊕W} ⊆ Φ
s
).
(iii) The minimal robust positively invariant set is de-
fined as the RPI set contained in any closed RPI
set. The mRPI set is unique, compact and contain
the origin if W contains the origin.
Definition 2. Given a scalar ε > 0 and sets Ω ⊂
R
n
and Φ ⊂ R
n
. The set Φ ⊂ R
n
is an outer ε-
approximation of Ω if Ω ⊆ Φ ⊆ Ω⊕ B
n
p
(ε).
Definition 3. A C-set is a convex and compact subset
of R
n
including the origin as an interior point.
3 MAIN RESULTS
As we mentioned in the introduction, first we will
focus on invariance properties of time-delay systems,
and we will consider the switching case next. The cor-
relation between obtained results and supplementary
discussion are exposed at the end.
3.1 Time-delay Case
In the current subsection remarks on existence,
uniqueness and construction of the invariant approx-
imations of mRPI set for the system Σ
d
(1) are pre-
sented.
Let consider dynamics Σ
d
(1), expressed in space
of sets by following set-valued map:
Ω
d
: Ω
d
(X) = A
0
X ⊕ A
d
X ⊕W, X ⊂ R
n
(3)
whose range is a convex set if X is convex.
For future analysis we invoke the following as-
sumption:
Assumption 1. Suppose there exist a symmetricC-set
L such that A
0
L⊕ A
d
L ⊆ λL, where λ ∈ [0, 1).
Remark 1. Previous statement assume existence of
the symmetric set L which is contractive with respect
to the dynamics x
k+1
= A
0
x
k
+ A
d
x
k−d
. Necessary
and sufficient conditions such that assumption 1 hold
is still an open problem. One of the possibilities
to overcome this is using one of the recently pre-
sented sufficient conditions in (Lombardi et al., 2011),
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
358

σ(A
0
) + σ(A
d
) < 1, or any other condition that meets
assumption 1. Note that introduced assumption im-
plies Hurwitz stability of the matrices A
0
and A
d
.
According to (Artstein and Rakovic, 2008) and
based on the results from the Banach fixed point theo-
rem and Assumption 1, the existence and uniqueness
of the mRPI set for Σ
d
(1) are obtained from the fol-
lowing theorem:
Theorem 1. Suppose that assumption 1 holds and L
and λ are used for the computation of the Hausdorff
distance d
H
. Then the set-valued map Ω
d
(3) is con-
tractive with respect to the Hausdorff distance. More-
over, there exists unique set, Ω
d
∞
, which is the mRPI
for the dynamics Σ
d
(1).
Proof. Let denote by X and Y two arbitrary C-sets
and d
H
(X,Y) = α. By the definition of the Hausdorff
distance we have:
X ⊆ Y ⊕ αL, X ⊆ Y ⊕ αL.
From previous assertion, using results from Lemma 2
and following statements,
A
d
X ⊆ A
d
Y ⊕ αA
d
L
A
d
Y ⊆ A
d
X ⊕ αA
d
L
we derive:
Ω
d
(X) ⊆ Ω
d
(Y) ⊕ α(A
0
L⊕ A
d
L)
Ω
d
(Y) ⊆ Ω
d
(X) ⊕ α(A
0
L⊕ A
d
L)
Recalling result from Lemma 3, A
0
L⊕ A
d
L ⊆ λL, we
have:
Ω
d
(X) ⊆ Ω
d
(Y) ⊕ αλL, Ω
d
(Y) ⊆ Ω
d
(X) ⊕ αλL.
which is, by the definition of the Hausdorff distance,
d
H
(Ω
d
(X),Ω
d
(Y)) = λα. Since α = d
H
(X,Y), the
contractivness of the set-valued map Ω
d
(3) is guar-
anteed i.e. d
H
(Ω
d
(X),Ω
d
(Y)) ≤ λd
H
(X,Y).
Because Ω
d
(3) is a contraction, according to the
Banach fixed point theorem, it has a unique globally
asymptotically stable fixed point Ω
d
∞
.
For the simplicity of the exposure let denote by
Ω
d
k
= Ω
d
k
(W). In order to define 0-reachable set for
dynamics with time delay, we use the follow set iter-
ation:
Ω
d
k+1
= A
0
Ω
d
k
⊕ A
d
Ω
d
k
⊕W. (4)
where Ω
d
k
is reachable set at forward step k, starting
from {0}. We can notice here that Ω
d
k
⊆ Ω
d
k+1
.
Now we will formulate analytic description of k
th
sequence from the previous iteration. In order to sim-
plify the comprehension of this step we introduce
following set of indices S = {‘0‘,‘d‘,‘1‘} in corre-
spondence with map Ω
d
(3), along with set product
S
k
= S × S × · ·· × S, where k ∈ Z
+
and S
0
= {1}.
Here is important to emphasize that ‘0‘, ‘d‘ and ‘1‘
are not values but indices, and ‘1‘ is an identity ele-
ment with respect to multiplication e.g. S
2
= S × S =
{‘00‘,‘0d‘,‘0‘,‘d0‘,‘dd‘,‘d‘,‘1‘}. For proposed no-
tations, we can write reachable set at k
th
forward step
as:
Ω
d
k
=
M
p∈S
k
A
p
W, (5)
where A
1
:= I
n
and A
p
stands for product of matrices
with respect to index p. Since the origin is included
in the relative interior of W it follows that it is also
included in interior of Ω
d
k
. Notice that S
k
⊂ S
k+1
.
As it is already remarked in(Artstein and Rakovic,
2008), (Rakovic, 2008), mRPI set is given as limit
value of the set iteration (4) when k → ∞ i.e.
Ω
d
∞
= lim
k→∞
(
M
p∈S
k
A
p
W) (6)
and it is the unique solution to the set-valued map (3)
Ω
d
∞
= A
0
Ω
d
∞
⊕ A
d
Ω
d
∞
⊕W. (7)
This statement can be proved if we observe the limit
value of the difference between two subsequent se-
quences Ω
d
k
and Ω
d
k+1
.
The constructive procedure relies on the results
exposed in (Rakovic, 2008) and (Olaru et al., 2010).
Invariant approximations of the mRPI set could be
constructed from any invariant set for the dynamics
Σ
d
(1). If such set exists (Olaru et al., 2010), invari-
ant approximations could be obtained by using that
set in the contractive map Ω
d
(3). This procedure is
outlined as follows:
Theorem 2. If there exists a family of invariant sets
with respect to the dynamics Σ
d
(1), then set itera-
tion Ω
d
k
(Φ
d
), for any set Φ
d
from that family, tends to
the mRPI set when k → ∞ i.e. lim
k→∞
Ω
d
k
(Φ
d
) = Ω
d
∞
.
Moreover, for ∀k Ω
d
k
(Φ
d
) is an invariant set.
Proof. Suppose Φ
d
is an invariant set for time-delay
system Σ
d
(1).
Let first define following set-valued map:
R
d
: R
d
(X) = A
0
X ⊕ A
d
X
along with corresponding set-iteration
R
d
k+1
(X) = A
0
R
d
k
(X) ⊕ A
d
R
d
k
(X),
where R
d
0
(X) = X and X is an C-set. Since the as-
sumption ρ(A
0
) < 1 and ρ(A
d
) < 1 hold, we can no-
tice that lim
k→∞
R
d
k
(X) = 0.
Let consider map Ω
d
(3) with respect to the set Φ
d
i.e. Ω
d
(Φ
d
) = A
0
Φ
d
⊕ A
d
Φ
d
⊕W. This map can be
written as:
Ω
d
k+1
(Φ
d
) = R
d
k+1
(Φ
d
) ⊕ Ω
d
k
FURTHER REMARKS ON INVARIANCE PROPERTIES OF TIME-DELAY AND SWITCHING SYSTEMS
359

where Ω
d
k
is defined by equation (5). Since
lim
k→∞
R
d
k
= 0, limit value of the previous equation
may be written as:
lim
k→∞
Ω
d
k+1
(Φ
d
) = lim
k→∞
Ω
d
k
= Ω
d
∞
.
Foregoing results point out the existence and
uniqueness of the mRPI set for dynamics Σ
d
.
3.2 Switching Case
In this subsection results for the class of switching
systems are presented in analogy with the time-delay
case. In particular, we deal here with existence,
uniqueness and approximative construction of mRPI
set.
Throughout this study we assume that there exists
common Lyapunov function for switching dynamics
Σ
s
which guaranties the asymptotic stability (Liber-
zon, 2003).
Assumption 2. There exists a matrix P ∈ R
n×n
and
λ ∈ (0, 1) such that
A
T
i
PA
i
− P ≤ −λP, P = P
T
> 0 (8)
for ∀i.
As in previous case, our observation of the prob-
lem is related to the set-theoretic framework. In this
sense we introduce the following map:
Ω
s
: Ω
s
(X) =
[
i
(A
i
X ⊕W), X ⊆ R
n
(9)
where i ∈ {‘0‘,‘d‘}. In spite of the time delay case,
range of the map Ω
s
is not a convex set in general,
even if X is convex.
As a direct consequence of Assumption 1 we have
the following Lemma:
Lemma 3. Suppose that Assumption 1 holds. Then
there exists symmetric C-set L such that
[
i
(A
i
L) ⊆ λL, λ ∈ [0,1) (10)
where i ∈ {‘0‘,‘d‘}.
Proof. Since Assumption 1 holds, for ∀c > 0 we can
define L
c
= {x ∈ R
n
| x
T
Px ≤ c}. Set L
c
is an in-
variant set for switching system Σ
s
since it is a level
surface of the common Lyapunov function. This set is
also symmetric as consequence of the quadratic form
of the common Lyapunov function.
In the sequel the existence and uniqueness of the
mRPI set for switching system Σ
s
are obtained using
Banach fixed point theorem and Lemma 3.
Theorem 3. Suppose that Assumption 2 is satisfied
and L and λ are used for the computation of the
Hausdorff distance d
H
. Then the set-valued map Ω
s
(9) is contractive with respect to the Hausdorff dis-
tance, for any compact and convex sets X and Y.
Moreover, there exists a unique set, Ω
s
∞
, which is the
mRPI set for the dynamics Σ
s
(2).
Proof. Let denote by X andY two arbitraryC-sets and
d
H
(X,Y) = α such that:
X ⊆ Y ⊕ αL, Y ⊆ X ⊕ αL.
By using relations from Lemma 2 we have:
A
0
X ⊕W ⊆ A
0
Y ⊕W ⊕ αA
0
L
A
d
X ⊕W ⊆ A
d
Y ⊕W ⊕ αA
d
L, (11)
and
A
0
Y ⊕W ⊆ A
0
X ⊕W ⊕ αA
0
L
A
d
Y ⊕W ⊆ A
d
X ⊕W ⊕ αA
d
L. (12)
Union of the left-hand sides of pair (11) and pair (12)
are included in the union of of the right-hand sides of
(11) and (12), respectively.
[
i
(A
i
X ⊕W) ⊆
[
i
(A
i
Y ⊕W) ⊕
[
i
αA
i
L,
[
i
(A
i
Y ⊕W) ⊆
[
i
(A
i
X ⊕W) ⊕
[
i
αA
i
L.
Recalling the set-valued map Ω
s
(9) and Lemma 4,
previous inclusions may be written as
Ω
s
(X) ⊆ Ω
s
(Y) ⊕ αλL, (13)
Ω
s
(Y) ⊆ Ω
s
(X) ⊕ αλL. (14)
Using the definition of Hausdorff distance, previous
statements can be written as
d
H
(Ω
s
(X),Ω
s
(Y)) = αλ (15)
which is indeed d
H
(Ω
s
(X),Ω
s
(Y)) ≤ λd
H
(X,Y),
since d
H
(X,Y) = α and λ ∈ [0,1).
Because the set-valued map Ω
s
(9) is a contrac-
tion, according to the Banach fixed point theorem
it has a unique globally asymptotically stable fixed
point, Ω
s
∞
(Artstein and Rakovic, 2008).
Based on the set-valued map Ω
s
(9), let define the
following set-iteration for X = {0}:
Ω
s
k+1
=
[
i
(A
i
Ω
s
k
⊕W) (16)
where Ω
s
k
⊆ Ω
s
k+1
and Ω
s
0
= {0}. Here by Ω
s
k
is de-
noted reachable set from the origin at k
th
forward step
of iteration. Since the origin is in the relative interior
of W it follows that it is also in the interior of Ω
s
k
for
∀k ∈ Z
+
.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
360

Minimal robust positive invariant set is given as the
limit value of (16) when k → ∞:
Ω
s
∞
= lim
k→∞
Ω
s
k
. (17)
We can notice here that minimal robust positive in-
variant set Ω
s
∞
is not convex in general.
Constructive procedure reported here relies on
results proposed in (Rakovic, 2008), (Olaru et al.,
2010). For this purpose we invoke following set-
iteration:
R
s
k+1
=
[
i
(A
i
R
s
k
), R
s
0
= {Φ
s
} k ∈ Z
+
. (18)
where Φ
s
is an initial invariant set with respect to
the switching dynamics Σ
s
(2). For more details on
the computation of invariant approximations of mRPI
sets we refer to the (Artstein and Rakovic, 2008),
(Rakovic, 2008) and (Olaru et al., 2010).
Theorem 4. Suppose that Assumption 1 holds. Thus,
there exists invariant set Φ
s
with respect to the dy-
namics Σ
s
(2), with 0 in its interior. Then Ω
s
k
⊆
Ω
s
k+1
⊆ Ω
s
k
⊕ R
s
k
is satisfied for ∀k ∈ Z
+
. Moreover,
set Ω
s
k
⊕ R
s
k
is an invariant outer approximation of the
minimal robust positive invariant set Ω
s
∞
for ∀k ∈ Z
+
.
Proof. For two arbitrary non-empty sets X and Y ⊂
R
n
, following properties hold (Rakovic et al., 2005):
[
i
[A
i
(X ⊕Y) ⊕W] ⊆
[
i
(A
i
X ⊕W) ⊕
[
i
(A
i
Y) (19)
where i ∈ {‘0‘,‘d‘} and
X ⊆ Y ⇒
[
i
(A
i
X ⊕W) ⊆
[
i
(A
i
Y). (20)
Since we assumed the existence of the common
Lyapunov quadratic function, then there exist invari-
ant set Φ
s
with respect to the switching dynamics.
Statement Ω
s
k
⊂ Ω
s
k+1
⊆ Ω
s
k
⊕ R
s
k
will be proved
by the principle of mathematical induction.
Because Ω
s
k
is 0-reachable set, it is evident that Ω
s
k
⊆
Ω
s
k+1
for ∀k ∈ Z
+
. For Ω
s
1
= W and Ω
s
0
⊕ R
s
0
= Φ
s
we have by definition Ω
s
1
⊂ Ω
s
0
⊕R
s
0
. Now we assume
that Ω
s
k+1
⊆ Ω
s
k
⊕ R
s
k
. Then, using properties (19) and
(20) we have:
Ω
s
k+2
:=
[
i
(A
i
Ω
s
k+1
⊕W) ⊆
[
i
[A
i
(Ω
s
k
⊕ R
s
k
) ⊕W]
⊆
[
i
(A
i
Ω
s
k
⊕W) ⊕
[
i
(A
i
R
s
k
) = Ω
s
k+1
⊕ R
s
k+1
,
for ∀k ∈ Z
+
.
Limit value of Ω
s
k
⊕ R
s
k
, when k → ∞ is:
lim
k→∞
(Ω
s
k
⊕ R
s
k
) = lim
k→∞
Ω
s
k
⊕ lim
k→∞
R
s
k
.
Because lim
k→∞
R
s
k
= 0, then lim
k→∞
Ω
s
k
= Ω
s
∞
.
Most of results reported in this subsection are al-
ready proposed in the literature in similar or different
form (Rakovic et al., 2005).
3.3 Correlation between Time-delay
and Switching Dynamics
In the previous subsections, results on the existence
and uniqueness of the minimal robust positive invari-
ant sets are presented using Banach fixed point the-
orem. In this subsection we propose new approach
on analysis of time delay systems from the invariant
set point of view, using corresponding switching dy-
namics. First result in that direction is stated in the
following theorem:
Theorem 5. Let consider matrices A
0
∈ R
n×n
,A
d
∈
R
n×n
and a C-set W ≤ R
n
that correspond to both
dynamics, Σ
d
(1) and Σ
s
(2). If mRPI sets for both
dynamics exist, then mRPI set for the switching dy-
namics Σ
s
is always a subset of mRPI set for the time
delay system Σ
d
i.e. Ω
s
∞
⊆ Ω
d
∞
.
Proof. For any three sets X, Y and Z ⊂ R
n
, such that
X ⊆ Z and Y ⊆ Z, the relation (X ∪Y) ⊆ Z holds.
We will prove Theorem 5 using the principal of
mathematical induction.
Since 0 ∈ W, we can notice that Ω
s
0
⊆ Ω
d
0
. Assume
that Ω
s
k+1
⊆ Ω
d
k+1
where Ω
s
k+1
and Ω
d
k+1
are defined
as:
Ω
s
k+1
=
[
i
(A
i
Ω
s
k
⊕W)
Ω
d
k+1
= A
0
Ω
d
k
⊕ A
d
Ω
d
k
⊕W
By definition we have:
Ω
s
k+2
= (A
0
Ω
s
k+1
⊕W) ∪ (A
d
Ω
s
k+1
⊕W)
Ω
d
k+2
= A
0
Ω
d
k+1
⊕ A
d
Ω
d
k+1
⊕W.
Since by assumption Ω
s
k+1
⊆ Ω
d
k+1
we can get follow-
ing relations:
A
0
Ω
s
k+1
⊕W ⊆ A
0
Ω
d
k+1
⊕ A
d
Ω
d
k+1
⊕W
A
d
Ω
s
k+1
⊕W ⊆ A
0
Ω
d
k+1
⊕ A
d
Ω
d
k+1
⊕W.
Using Property 1 in previous result we have:
[
i
(A
i
Ω
s
k+1
⊕W) ⊆ A
0
Ω
d
k+1
⊕ A
d
Ω
d
k+1
⊕W,
that is Ω
s
k+2
⊆ Ω
d
k+2
. Proof of the Theorem 5 follows
from the principal of mathematical induction so we
have:
Ω
s
k
⊆ Ω
d
k
, ∀k ∈ Z
+
.
Remark 2. The assumption that the origin is con-
tained in the interior of the convex disturbance set
can be relaxed assuming that W has nonempty inte-
rior and that there exists a point c ∈ W that is the
FURTHER REMARKS ON INVARIANCE PROPERTIES OF TIME-DELAY AND SWITCHING SYSTEMS
361
analytical center of the convex body. The mRPI set
corresponding to W now can be expressed as a trans-
lation of the mRPI set corresponding to W ⊕ {−c}.
For more details we refer to the (Olaru et al., 2010).
Corollary 1. A necessary condition for existence of
the bounded mRPI set for the time delay system Σ
d
(1)
is the boundedness of the mRPI set for the switching
dynamics Σ
s
(2).
Corollary states necessary condition for existence
mRPI set for time-delay systems via existence of
mRPI set for switching systems. What is more im-
portant, it has shown that these two different systems
dynamics may be correlated from the stability point
of view.
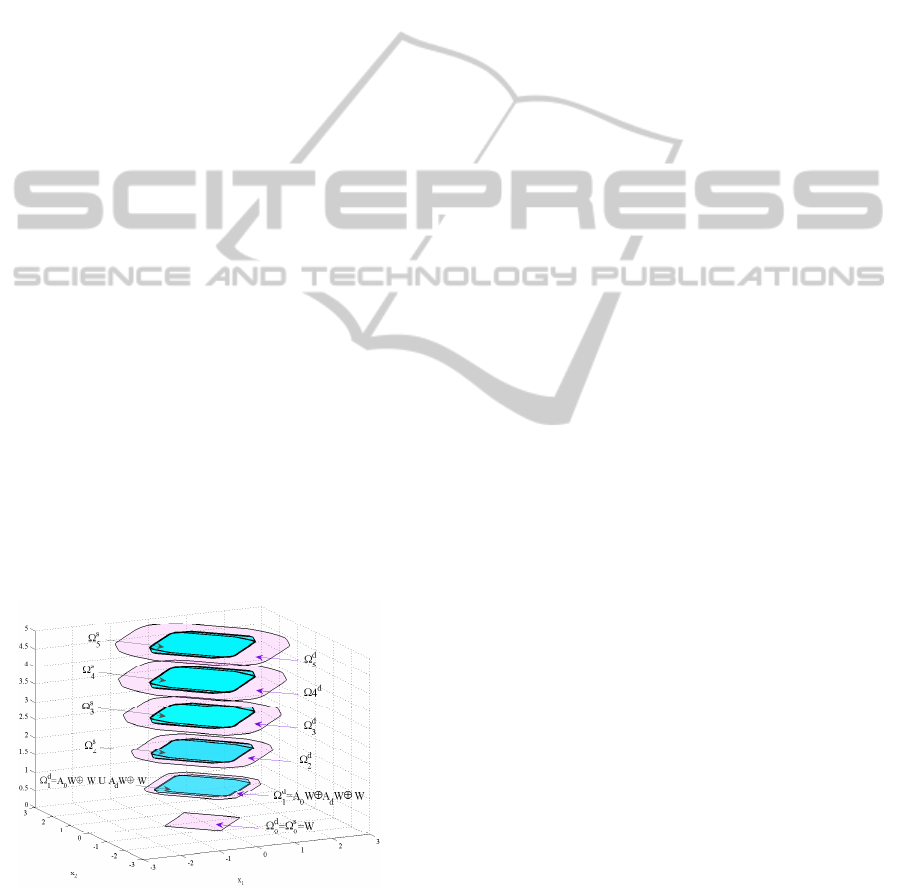
4 ILLUSTRATIVE EXAMPLE
In order to clarify exposed theory, an illustrative ex-
ample is outlined in this section.
Consider the discrete time-delay system Σ
d
(1)
and switching dynamics Σ
s
(2) represented by the
triplet (A
0
,A
d
,W), where
A
0
=
0.2 0
−0.15 0.3
, A
d
=
0.3 −0.15
0.2 0.25
and W = kxk
1
≤ 1, x ∈ R
2
. Initial invariant set for
both systems is arbitrary chosen as Φ
d
= Φ
s
= kxk
1
≤
6.
All reachable sets were obtained by a direct
application of defined set-iterations. Since the
Minkowski addition is computationally very expen-
sive, we present results just for lower dimensional
polytopes, i.e. iterations 0 to 5 (See Fig1).
Figure 1: 0-reachable set for time delay system and switch-
ing dynamics - lower dimensional polytopes.
5 CONCLUSION REMARKS
This paper has reported discussion on minimal robust
positiveinvariantset for time delay and switching sys-
tems and their correlation. We showed that the exis-
tence of mRPI set for switching system is a necessary
condition for existence of mRPI set for correspond-
ing time delay dynamics. What is more important,
we set up connection between two classes of different
dynamics, which gives us new theoretical approach in
the analysis of some open questions such as necessary
and sufficient conditions for existence of invariant sets
for time-delay systems.
ACKNOWLEDGEMENTS
The second author acknowledges the support of the
CNCS-UEFISCDI project, Romania (project TE 231,
no. 19/11.08.2010).
REFERENCES
Artstein, Z. and Rakovic, S. (2008). Feedback and invari-
ance under uncertainty via set-iterates. Automatica,
44(2):520–525.
Blanchini, F. and Miani, S. (2008). Set-theoretic methods in
control. Springer.
Kolmanovsky, I. and Gilbert, E. (1998). Theory and com-
putation of disturbance invariant sets for discrete-time
linear systems. Mathematical Problems in Engineer-
ing, 4(4):317–363.
Liberzon, D. (2003). Switching in systems and control.
Springer.
Lombardi, W., Olaru, S., Lazar, M., and Niculescu, S.
(2011). On Positive Invariance for Delay Difference
Equations. American Control Conference.
Niculescu, S. (2001). Delay effects on stability: A robust
control approach. Springer Verlag.
Olaru, S., De Dona, J., Seron, M., and Stoican, F. (2010).
Positive Invariant Sets for Fault Tolerant Multisensor
Control Schemes. International Journal of Control,
83(12):2622–2640.
Rakovic, S. (2008). Minkowski algebra and Banach con-
traction principle in set invariance for linear discrete
time systems. In Decision and Control, 2007 46th
IEEE Conference on, pages 2169–2174. IEEE.
Rakovic, S., Kouramas, K., Kerrigan, E., Allwright, J., and
Mayne, D. (2005). The minimal robust positively in-
variant set for linear difference inclusions and its ro-
bust positively invariant approximations. Automatica.
Sipahi, R., Niculescu, S., Abdallah, C., Michiels, W., and
Gu, K. (2011). Stability and Stabilization of Systems
with Time Delay. Control Systems Magazine, IEEE,
31(1):38–65.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
362
