
SELF-ORGANISED DISTRIBUTION OF TASKS INSIDE
A NETWORKED ROBOTIC SYSTEM
Sebastian Smolorz and Bernardo Wagner
Institute of Systems Engineering, Real Time Systems Group
Leibniz Universität Hannover, Appelstr. 9A, D-30167 Hannover, Germany
Keywords: Autonomic Computing, Organic Computing, Self-organisation, Self-X, Real-time, Optimisation, Genetic
algorithm, Task distribution, Networked robotic system.
Abstract: For several years, mobile multi-robot systems are a main focus in robotic research. The possibilities to carry
out demanding algorithms in a networked robotic system grow as computational resources used by those
robots become more and more powerful and inexpensive. One major question is how to distribute the
necessary algorithms and tasks to the available computers so that all requirements are met and furthermore,
an optimal distribution pattern is achieved. This paper presents a new approach for generating an optimal
task distribution pattern without human intervention based on the concepts of Autonomic Computing and
Computational Intelligence. Although still in its conceptual state, we describe why our approach seems to be
promising for this particular problem. Additionally, further challenges and research demand are outlined.
1 INTRODUCTION
Autonomous mobile robots used for research during
the past decade usually were systems with only one
computer taking care of executing all software
modules, computations and algorithms. In the field
of robotic research, several algorithms exist that
have high computational costs, like the ICP
algorithm used for 3D point mapping as stated by
Langerwisch and Wagner (2010). Those algorithms
and with it the quality of the robots’ application
would benefit directly from the availability of more
computation power, especially when real-time
constraints have to be considered. One viable way to
boost performance is to connect several computers
and parallelize the algorithmic load.
Advanced frameworks for robotic applications
are usually organised in modules with well-defined
responsibilities and interfaces (Wulf et al., 2003). By
using a messaging service to exchange data via a
real-time capable network like RTnet (Kiszka et al.,
2005), a distribution of interdependent tasks with
fulfilled real-time requirements can be achieved.
The proper distribution of tasks to computers is
not always apparent, especially when a large number
of tasks and computers exist. Certain requirements
have to be fulfilled in any case, like deadlines. But
possible distribution patterns could differ in quality,
like the used network bandwidth or the load of
computers. To find a satisfying distribution pattern
by hand can be tedious at least; it could become
impossible at a high number of tasks and computers.
This paper presents the proposal of a system
capable of finding an optimal distribution pattern for
a set of real-time tasks and computers automatically.
Based on the concepts of Autonomic Computing
(Kephart and Chess, 2003) and Organic Computing
(Schmeck, 2005), the proposed system distributes
the tasks in an optimal manner with regard to the
minimal usage of network bandwidth and the
algorithmic load balance. The system is adaptive and
dynamic, i.e. it does not only emit a valid
distribution pattern during the setup phase but
handles environmental changes while the networked
robotic system performs like loss of processing
capacity or added computing components.
Section 2 gives a short overview of related work
and existing approaches in this area. In Section 3 the
concept of the proposed system is introduced
together with the idea of the optimization approach.
Section 4 outlines the open questions and challenges
that lie on the way to a real robotic system with the
presented autonomic properties. In Section 5 the
conclusion of our idea of a self-organised networked
robotic system is given.
235
Smolorz S. and Wagner B..
SELF-ORGANISED DISTRIBUTION OF TASKS INSIDE A NETWORKED ROBOTIC SYSTEM.
DOI: 10.5220/0003572402350238
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 235-238
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 STATE OF THE ART
The question of implanting a software component
with self-management capabilities into a real-time
robotic control system was posed by Steiner, Hagner
and Goltz (2007), especially for the control of
parallel kinematic machines. One goal the authors
wanted to achieve with the aid of this so called self-
manager was the distribution of control tasks to
several connected PCs in a way that higher cycle
frequencies of control components became possible.
The scheduling analysis tool SymTA/S (Henia et al.,
2005) was used to check whether potential
distribution patterns meet all real-time requirements
before actually applying them.
The drawback of this approach was the necessity
of creating SymTA/S models of every system before
the execution could start. In contrast, Stein, Hamann
and Ernst (2006) present a first step towards a
distributed online performance analysis and
optimization system. However, SymTA/S models
are not generated automatically during the execution
of a distributed system but supposed to be delivered
together with system or application changes.
The facility to distribute tasks to several
computing units by means of a self-manager leads to
the question how an amount of tasks is apportioned.
Steiner et al. (2008) state that an optimal mapping of
control tasks to control PCs minimizes the network
communication and balances the algorithmic load.
As there are M
N
possibilities to distribute N tasks to
M computing units a two-stage heuristic is proposed
to tackle this NP-hard problem. The first stage
arranges for the balancing of the algorithmic load
while the second step tries to minimize the bus
communication. This last step is prone to destroy
some of the balance reached in the first stage so it
could be seen as problematic in view of the whole
optimization problem.
Jakob et al. (2009) broached the issue of job
scheduling and resource allocation in the context of
grid computing which can be seen as related
problem. Users send jobs to a grid cluster and expect
them to be executed as quickly as possible but also
preferably cheap. The provider of the cluster, on the
other hand, is keen to operate the resources at full
capacity and for this reason generate more income.
The authors introduce an Evolutionary Algorithm
(EA) to optimise schedules which were planned by a
previous heuristic. Experiments show measurable
improvements over the heuristic plans, even
correcting illegal schedules because of budget
violation.
3 CONCEPT
Steiner et al. (2008) identify two criteria which act
as optimization targets for the distribution problem:
1. Minimizing network communication;
2. Balancing the algorithmic load.
These criteria are adopted in our concept since
they lead to reasonable task distribution patterns.
Minimizing communication over a slow bus
improves the response time of interconnected
modules as their data can be copied inside the fast
system memory. The more bandwidth remains free
the easier it gets to add more data transmissions
between the computers if it becomes necessary at a
later time during system operation. A small band-
width utilization lowers the risk of a malfunctioning
system in case of fragile network quality.
Balancing the algorithmic load is desirable if an
algorithm can be scheduled in parallel. A good
example is the Monte Carlo Localization used by
mobile robots to determine their global position
inside a given map (Wulf et al., 2005).
Choosing an appropriate optimization algorithm
is crucial for obtaining the optimal distribution
pattern for a given task-resource conglomerate in a
specific situation. In opposition to Steiner et al.
(2008) we propose a genetic algorithm (GA) to
tackle the distribution problem. GAs, or EAs
generally (Engelbrecht, 2007), have strengths when
it comes to multi-objective optimization problems.
Moreover, GAs are not limited to a certain problem
class, thus being applicable to our distribution
problem in principle. However, for a successful
optimization process the genetic problem
representation plays an essential role which will be
handled in the following subsection in more detail.
3.1 Optimization Algorithm
The chromosome of the problem representation must
be suitable to conduct the usual genetic operations
(selection, crossover, mutation) and permit an easy
interpretation of the genotype, in our case the
mapping of tasks (T
n
) to computing resources
(CR
m
). We propose a chromosome containing as
many genes as tasks are intended to be distributed.
The value of one gene, the allele, determines the
computing resources the task is executed on.
Figure 1 shows an exemplary initial population
of three individuals. Six tasks (T
1
-T
6
) are to be
distributed to three computing resources (CR
1
-CR
6
).
For example, the second individual of the initial
population assigns T
3
and T
6
to CR
1
, T
1
and T
4
to
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
236
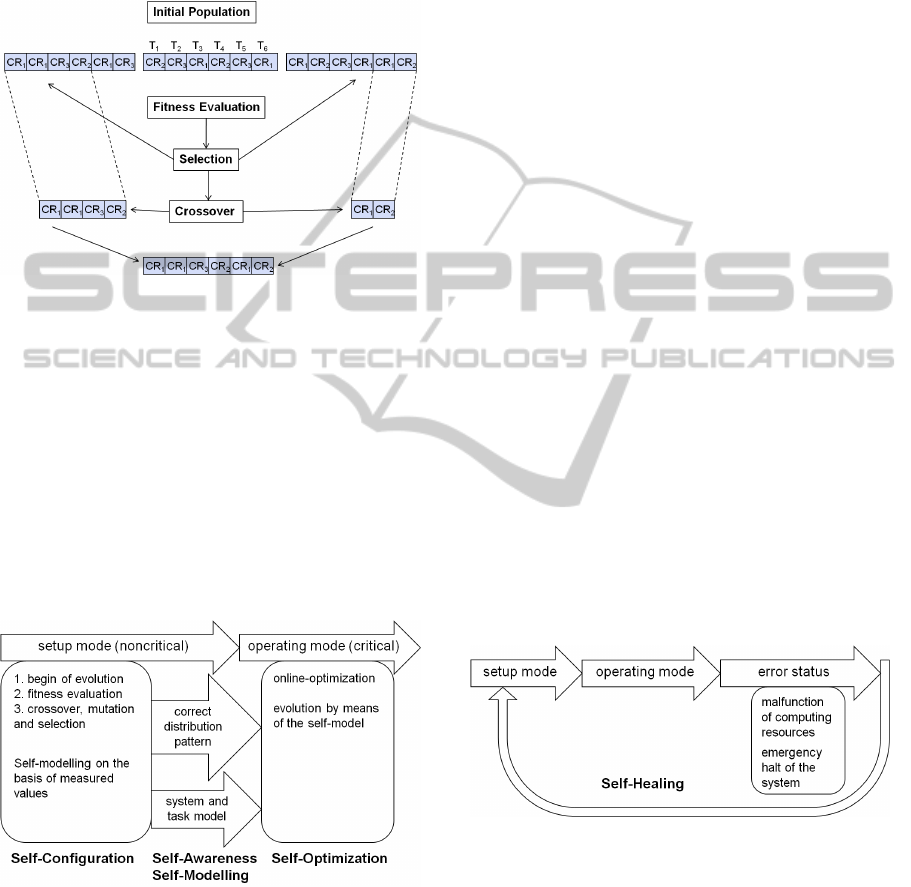
CR
2
and T
2
and T
5
to CR
3
. Figure 1 also shows a
standard GA process with individual 1 and 3 being
selected and crossed after gene 4 of individual 1. A
mutation is missing in this example but not excluded
in general. More about the fitness evaluation follows
in Subsection 3.4.
Figure 1: Genetic Algorithm.
3.2 Initial Task Distribution
Before putting a networked robotic system into
operation the decision about a correct and optimal
distribution pattern has to be made, thus it is
necessary to let the evolution process run in
advance. This setup mode is noncritical and lets the
robotic system perform different task distribution
patterns to test the validity and quality of the pattern
with respect to bus communication and algorithmic
load distribution. Figure 2 depicts the setup mode
and the subsequent operating mode:
Figure 2: Setup and operating mode.
The gathering of relevant system data measured
during the live runs of different distribution patterns
can be used to construct a model of the whole
networked system. This self-model can be used later
to perform further evolution steps without
interfering with the operating system.
Once the setup mode is completed, i.e. a correct
distribution pattern is found and the evolution
process has reached an individual good enough for
putting the robotic system into operation self-
configuration (in terms of Autonomic Computing)
was successful and the system enters the operation
mode. This mode is critical since now it is not
feasible to examine further distribution patterns.
Nevertheless, it is desirable to continue evolution
because there might exist a better distribution
pattern. This self-optimization can be carried out
with the help of the self-model in parallel to the
normal tasks of the system.
Once a better individual than that forming the
current distribution pattern is found a
reconfiguration of the task arrangement can be
conducted when the system enters a safe system
state. The construction and utilisation of a self-
model can be seen as a form of self-awareness.
3.3 Error Status
Due to external conditions computing resources
could become unavailable, e.g. in case of
malfunctioning hardware, during the runtime of the
system. In such a situation the tasks being executed
on the now missing resource have to be redistributed
to the remaining resources. The system has to enter
an error status, accompanied by an emergency halt
of all critical components. Since an unknown
distribution pattern with less alleles has to be found
a new evolution run with a transition to the setup
mode is necessary. Figure 3 illustrates this self-
healing procedure.
Figure 3: Error Status (Self-Healing).
3.4 Fitness Evaluation
During the evolution process individuals with illegal
distribution patterns could arise, e.g. with deadline
violations. They could be detected during the setup
phase and sorted out. The fitness of correct
distribution patterns has to be evaluated according to
the objectives specified above. Since minimizing the
bus communication is contrary to balancing the
algorithmic load it has to be analysed how those
SELF-ORGANISED DISTRIBUTION OF TASKS INSIDE A NETWORKED ROBOTIC SYSTEM
237

conflictive objectives can be both optimized. We
have to check which multi-objective optimization
approach is applicable for our problem. One general
approach was described by Beume et al. (2008).
4 FUTURE WORK
The described concept still has to be proven and
tested. Preparations for experiments are under way,
an adequate software framework for mobile real-
time robotic systems with a plethora of modules and
sophisticated algorithms is available (Web, 2011). A
good candidate for gathering first experimental
results is the Monte Carlo Localization (MCL) as
described in Section 3. In addition to the need for
parallel computation resources during global
localization, the position tracking of the MCL needs
high iterative computing power. Therefore we have
to consider that situations exist where balancing the
algorithmic load is not an appropriate evolution
objective but rather a minor loaded computing
resource to carry out a high number of algorithmic
iterations.
The autonomic self-manager which is
responsible for finding distribution patterns by
means of the presented Genetic Algorithm as well as
constructing the self-model and online-optimization
has to be implemented and integrated into the
robotic framework RACK (Web, 2011). An open
issue is the way the online-optimization will be
realized. We have to evaluate whether the approach
of Stein et al. (2006) (see also Section 2) is viable
for us or whether the scheduling analysis algorithms
SymTA/S is based on (Henia et al., 2005) will be
directly integrated into our self-manager.
5 CONCLUSIONS
In this paper, we presented the idea of a system
capable of autonomously distributing tasks to
available computing resources. The system will be
able to generate correct and optimal distribution
patterns in order to set up the system. During this
procedure a self-model of the system is obtained and
used while the system operates to further optimize
the distribution pattern currently in use. We
described how the system performs self-healing in
case of failing components. The need for more
research in the field of the proposed optimization
approach as well as future work for getting
experimental results were outlined as well. The
system is well suited for mobile autonomous
networked robots which are employed for various
duties in complex environments where localization
algorithms are used as well as alternate requirements
cause differing calculation times of the involved
algorithms.
REFERENCES
Beume, N., Naujoks, B. and Rudolph, G. (2008). SMS-
EMOA – Effektive evolutionäre Mehrzieloptimierung.
at – Automatisierungstechnik, 7/2008, pp. 357-364.
Engelbrecht, A. P. (2007). Computational Intelligence: An
Introduction (2
nd
ed.). Wiley.
Henia, R., Hamann, A., Jersak, M., Racu, R., Richter, K.,
Ernst, R. (2005). System level performance analysis –
the SymTA/S approach. In IEEE Proc. Computers and
Digital Techniques, Vol. 152, 2, pp. 148-166.
Jakob, W., Hahnenkamp, B., Quinte, A., Stucky, K.-U.
and Süß, W. (2009). Schnelles Scheduling mit Hilfe
eines hybriden Evolutionären Algorithmus. at –
Automatisierungstechnik, 3/2009, pp. 106-114.
Kephart, J. O. and Chess, D. M. (2003). The Vision of
Autonomic Computing. IEEE Computer, 36(1) :41-50.
Kiszka, J., Wagner, B., Zhang, Y. and Broenink, J. (2005).
RTnet – A flexible hard real-time networking frame-
work. 10
th
IEEE International Conference on Emer-
ging Technologies and Factory Automation, Catania.
Langerwisch, M., Wagner, B. (2010). Registration of in-
door 3D range images using virtual 2D scans. 7
th
International Conference on Informatics in Control,
Automation and Robotics, Funchal, Madeira, Portugal.
Schmeck, H. (2005). Organic Computing – A new vision
for distributed embedded systems. Proc. of the 8
th
IEEE International Symposium on Object-Oriented
Real-Time Distributed Computing, pages 201-203.
Stein, S., Hamann, A. and Ernst, R. (2006). Real-time
property verification in Organic Computing Systems.
In Proceedings of the 2
nd
International Symposium on
Leveraging Applications of Formal Methods,
Verification and Validation, Paphos, Cyprus.
Steiner, J., Hagner, M., Goltz, U. (2007). Runtime analysis
and adaption of a hard real-time robotic control
system. Journal of Computers, Vol. 2 (10), pp. 18-27.
Steiner, J., Amado, A., Goltz, U., Hagner, M. and Huhn,
M. (2008). Engineering self-management into a robot
control system. Proc. of 3
rd
International Colloquium
of the Collaborative Research Center 562.
Web (2011). The Robotics Application Construction Kit –
RACK. http://developer.berlios.de/projects/rack/.
Wulf, O., Kiszka, J., Wagner, B. (2003). A compact soft-
ware framework for distributed real-time computing.
In 5
th
Real-Time Linux Workshop, Valencia, Spain.
Wulf, O., Khalaf-Allah, M. and Wagner, B. (2005). Using
3D data for Monte Carlo Localization in complex
indoor environments. In European Conference on
Mobile Robots (ECMR), Ancona, Italy.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
238
