
IRIS IMAGE SEGMENTATION BASED
ON INDUSTRIAL VISION TOOLS
Silvia Anton and Florin Daniel Anton
Department of Automation and Industrial Informatics, University Politehnica of Bucharesty
Spl.Independentei, 313, Bucharest, Romania
Keywords: Iris recognition system, Image processing, Iris image segmentation, Intelligent vision tools, Rapid
deployment applications.
Abstract: In the last few years biometric data acquisition and processing systems for person identity verification and /
or identification started to be increasingly used. This is done both in military applications for person
identification in military operations and war theatres, but also in civilian applications for personal identity
verification, accounting systems, etc. Depending on the organization policy, such systems must be secured
and customized, for application enhancement, and to fulfil the organization requirements. Such systems
which allow customization and enhancement are not available for source code modification and feature
enhancement. This paper presents a software image processing development environment IPDE based on
vision tools, which is able to run vision projects but also allow the user to develop stand alone applications
in a short amount of time, applications which are based on customized vision tools. The IPDE is used to
exemplify the process of creating an iris recognition application where a set of vision tools were used in
order develop a customized iris image segmentation routine. The paper is structured on three chapters
presenting the IPDE architecture, the vision tools, the application development stages, and ends with some
experimental data and conclusions.
1 INTRODUCTION
In the last years, the identification and verification of
the identity of persons has become an increasingly
important factor (Zhai, 2009; Patnala, 2009; Araghi,
2010; Matschitsch, 2008). A special place is held by
systems for person identity verification /
identification based on the iris, which were accepted
and used especially in military applications (L-1
Identity Solutions Inc., 2010).
The biggest advantage of using the iris as a
biometric verification and recognition method is the
accuracy and reliability (Daugman, 2004) estimated
to be ten times more accurate than methods using
fingerprint, iris-based methods produce a false
match rate (or false acceptance rate – FAR) of 1/1-2
million samples, while fingerprint-based methods
produce a false match rate close to 1/100000
samples (Cao, 2005; Ganeshan, 2006;). Due to this
aspect some countries have initiated the procedures
to integrate the iris biometric data into the
population identification cards.
While fingerprints are constantly exposed and
are likely to deteriorate, the iris is naturally protected
by the cornea (a transparent membrane covering the
eye) and its model seems to remain unchanged for
decades, being only affected by some eye diseases
which are more frequently found to elders,
population which is less probable to be involved in
such identification process.
Unlike fingerprint scanners, which require direct
contact and must be kept extremely clean, iris scan
can perform safely and hygiene at some distance
from the eye. Disadvantages include the iris
scanning higher initial cost (few thousands of
dollars) and the fact that it is still a relatively new
technology that has not been tested enough.
Also to implement this technology some
organizations require special software products
developed “in the house”. In order to do this in the
shortest time, an IPDE which allow rapid application
development is needed.
This paper gives some solutions to the issues
presented and offers a rapid implementing solution
for acquiring and processing iris information. In the
333
Anton S. and Daniel Anton F..
IRIS IMAGE SEGMENTATION BASED ON INDUSTRIAL VISION TOOLS.
DOI: 10.5220/0003572803330336
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 333-336
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
next sections the software architecture of the
proposed solution is described, followed by the
presentation of the vision tools used and examples.
2 THE SOFTWARE
ARCHITECTURE
In order to rapidly develop an iris recognition
application which can be customized by the
organization, the image processing subsystem must
be accessible for modifications. Only few IPDE
have this property, and have been considered for
implementation, in the end the chosen system was
AdeptSight from multiple reasons:
• The vision system have high performances in
object localisation: 1/40 of a pixel in position,
and 0.01 degree in rotation (which allow a
precise iris, pupil and eyelid localization)
• The system has the possibility to train and edit
object models based on non connected contours
(this is the case of the iris, which in most
situations is partially occluded by the eyelid)
• The programming interface is based on visual
tools (visual programming) for rapid
development, and has also the possibility to be
integrated with high level programming
languages (C#) for complex applications.
• The system can be easily integrated with other
systems by using Ethernet, serial, or I/O lines.
(Fig. 1)
Figure 1: External device - Vision System integration.
AdeptSight uses up to four FireWire cameras
connected directly to the PC where the AdeptSight
software is installed.
The development of vision applications is based
on vision projects which have the following
structure: The vision project is separated in two
main parts, the first part handles the hardware and
the communication environment and is composed by
communication routines and configuration of system
devices like cameras (Basler, Direct Show or
Emulation – virtual camera), and other hardware
devices. The second part is represented by the vision
sequences, which compose the principal part of the
project. The sequences are composed by vision tools
connected together and which are executed step by
step in a sequence defined by the programmer. In
addition the user can develop C# programs which
interact with the AdeptSight project and extend his
functions regarding the communication with other
devices and other functions which are not
implemented in AdeptSight.
3 VISION PROJECT
IMPLEMENTATION
The vision is calibrated using a dotted pattern which
is placed in front of the camera at a distance which
approximates the distance to the subject eye. The
calibration is executed using a 2D camera calibration
wizard which guides the user step by step through
the calibration process. The single information
which the user must supply is the Dot Pitch of the
calibration pattern, the rest of the process is handled
by the wizard. After the 2D camera calibration the
following information’s are obtained:
• Average Pixel Width/Height
• The lens distortions are corrected
• The perspective distortion is also corrected
After the 2D camera calibration, the sequence
can be loaded into the project, and for this
application the sequence is very simple and consists
on the following vision tools, an acquisition tool
which obtain the image from the camera, a set of
two localization tools named Locator(s) which have
the role to recognize the pupil and the iris
boundaries, and a set of two locators which will
detect the eyelid boundaries, which are required in
order to obtain only the iris valid image date.
In this application the difficulty is to detect the
correct boundaries of the iris disregarding the outer
irregularities which are generated by the contrast
between the iris and sclerotic membrane and the
eyelids.
Fig. 2 presents the interface for model editing.
The system, based on the contrast threshold, and the
outline and detail levels detect the contours and
proposes the user a set of contours for model
building. The outline level provides a coarser level
of contours than the detail level. The location
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
334
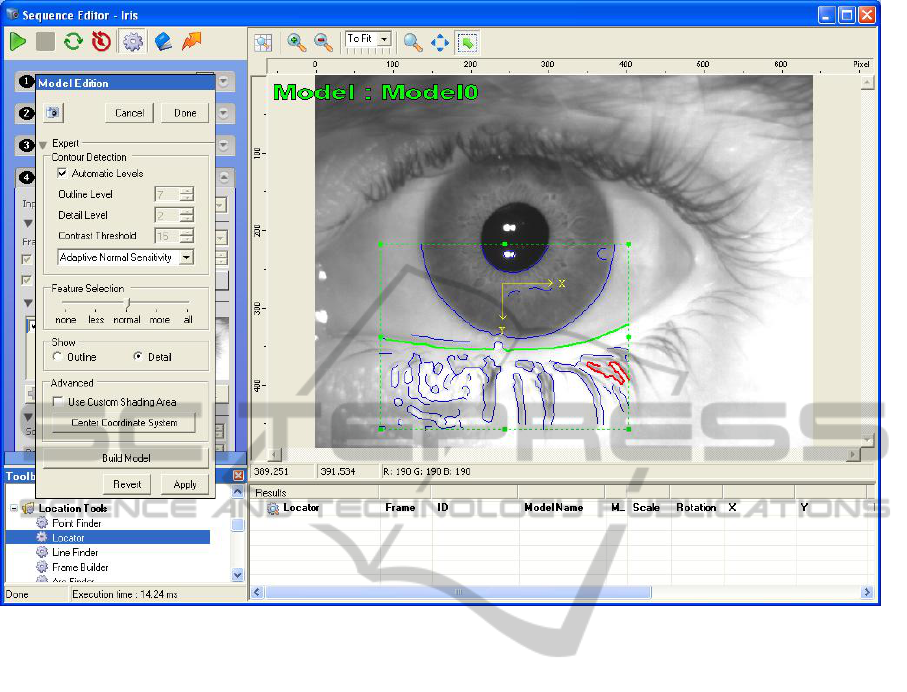
Figure 2: Editing the model for the lower eyelid.
process uses outline level contours to rapidly
identify and roughly locate potential instances of the
object, then, the location process uses the detail level
contours to confirm the identification of an object
instance and refine its location within image.
The user can modify the selected contours by
deleting/adding contours, or select only parts of the
proposed contours (Adept, 2001, Adept, 2007). In
Fig. 2 the red line is selected for deletion, the blue
contours are marked as deleted (will not be used for
model building) and the green contours are valid
contours. After all contours have been selected, the
model can be build and used for recognition.
4 CONCLUSIONS
The proposed IPDE is a software development
environment for image processing which allow rapid
application development and in the same time allows
the developer to customize the vision tools which
the IPDE offers by default.
The AdeptSight IPDE is a fast solution for
developing “in house” customized iris recognition
applications for organizations which require a high
level of personal identification system customization
and optimization. The IPDE offers a set of default
vision tools which can be customized by changing
the parameters in the vision project but also allows
the developer to write applications in which those
tools can be used and moreover modified to satisfy
the application necessities.
In our case the application demonstrates the
rapidity of image processing of the vision tools (all 5
tools – 1 acquisition tool, and 4 locators, have been
executed in less than 30 milliseconds). Also we
demonstrated the reliability of the vision tools 98%
of the images which had the iris in the centre of the
image have been correctly segmented (the pupil, iris,
and eyelids have been correctly and accurately
detected) (the tests have been conducted on Bath Iris
image database) (University of Bath, 2009). In the
rest of the images where the iris was not centred the
system have problems in detecting the eyelids due to
the angle which the axis of the camera makes with
the eye, the eyelids borders being masked by the hair
on the eyelid.
Figure 3 presents some results in detecting the
pupil, iris and eyelids basic features in iris
segmentation. The used method can be as good as
IRIS IMAGE SEGMENTATION BASED ON INDUSTRIAL VISION TOOLS
335

Figure 3: Results in detecting the pupil, iris, and eyelids for iris image segmentation.
other classic segmentation methods (sobel filters,
Gabor and long Gabor filtering) (Daugman, 2007;
Popescu-Bodorin, 2010).
ACKNOWLEDGEMENTS
The work has been co-funded by the Sectoral
Operational Programme Human Resources
Development 2007-2013 of the Romanian Ministry
of Labour, Family and Social Protection through the
Financial Agreement POSDRU/89/1.5/S/62557.
REFERENCES
Adept Technology Inc., 2001, AdeptVision Reference
Guide Version 14.0 Part Number 00964-03000, San
Jose, Technical Publications.
Adept Technology Inc. 2007, AdeptSight 2.0 Online Help,
San Jose, California, USA.
Araghi, L. F., Shahhosseini, H., Setoudeh, F., 2010. Iris
Recognition Using Neural Network. Proceedings of
The International MultiConference of Engineers and
Computer Scientists 2010 Vol I, IMECS 2010, March
17-19, Hong Kong
Cao, W., Hu, J., Xiao, G., Wang, S., 2005. Iris
Recognition Algorithm Based on Point Covering of
High-Dimensional Space and Neural Network,
MLDM 2005, LNAI 3587, pp. 305 – 313, Springer-
Verlag Berlin Heidelberg 2005
Daugman, J. G., 2004. How iris recognition works, IEEE
Trans. On circuits and Systems for Video Technology,
vol. 14, no. 1, pp. 21-30.
Daugman, J. G., 2007. New methods in iris recognition,
IEEE Trans. On Systems, Man, and Cybernetics - part
B: Cybernetics, vol. 37, no. 5., pp. 1167-1175.
Ganeshan, B., Theckedath, D., Young, R., Chatwin, C.,
2006. Biometric Iris Recognition System Using A Fast
And Robust Iris Localization And Alignment
Procedure, Optics and Lasers in Engineering 44
(2006) 1–24
L-1 Identity Solutions Inc., 2010. HIIDE 5 Solutions,
http://www.l1id.com/pages/774-hiide-5.
Matschitsch, S., Stogner, H., Tschinder, M., 2008.
Rotation-Invariant Iris Recognition Boosting 1d
Spatial-Domain Signatures To 2D, ICINCO 2008 -
International Conference on Informatics in Control,
Automation and Robotics.
Patnala, S. R., Murty, C., Reddy, E. S., Babu, I. R., 2009.
Iris Recognition System Using Fractal Dimensions of
Haar Patterns. International Journal of Signal Pro-
cessing, Image Processing and Pattern Recognition,
Vol. 2, No.3.
Popescu-Bodorin N., Balas, V. E., 2010. Comparing Haar-
Hilbert and Log-Gabor Based Iris Encoders on Bath
Iris Image Database. IEEE SOFA 2010. (http://fmi.
spiruharet.ro/bodorin/articles/ieee-sofa-2010-bodorin-
balas.pdf)
University of Bath Iris Database. (2009) http://www.bath.
ac.uk/eleceng/researc
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
336
