
DGridSim: A REAL-TIME DATA GRID SIMULATOR WITH
HIERARCHICAL JOB AND DATA SCHEDULING
Safai Tandoğan
1
, Atakan Doğan
2
and Celal Murat Kandemir
3
1
C Tech, TUBITAK MAM TEKSEB, Kocaeli, Turkey
2
Department of Electrical and Electronics Engineering, Anadolu University, Eskisehir, Turkey
3
Department of Electrical and Electronics Engineering, Eskisehir Osmangazi University, Eskisehir, Turkey
Keywords: Discrete-event simulation, Modeling, Data Grid.
Abstract: In this study, DGridSim, a process oriented and discrete-event driven all-in-one Data Grid simulator, is
introduced, and some initial simulation results are reported to validate its operation. DGridSim has some
distinguishing features which make it unique among the Data Grid simulators available in the literature.
First of all, in order to provide the guaranteed service to real-time jobs running on the system, DGridSim
incorporates the advance reservation of all system resources, including computing, network, and storage.
Second, DGridSim supports a hierarchical real-time scheduling architecture for both jobs and jobs’ data.
Third, it allows the simulation of all related components of a Data Grid system which may have an impact
on the system’s real-time performance.
1 INTRODUCTION
In this study, a real-time Data Grid simulator,
namely DGridSim is presented. The main objective
in developing DGridSim is to provide an all-in-one
platform to study real-time job distribution, data
replication, and data dissemination algorithms for
Data Grids.
In the literature, a variety of simulators has been
proposed: Optorsim (Camaron, Millar, Nicholson,
Schiaffino, Zini and Stockinger, 2004), GridSim
(Buyya and Murshed, 2002, Sulistio, Cibej, Robic
and Buyya, 2008), SimGrid (Casanova, 2001). A
comparison study of a variety of simulators for the
Grid systems, including GridSim, Optorsim, and
SimGrid, was presented by Quetier and Cappello,
2005.
None of aforementioned simulators focuses on
the evaluation of the real-time performance of the
Grid systems. Furthermore, among these simulators,
DGridSim has some remarkable features, some of
which are as follows: (1) Hierarchical real-time job
scheduling algorithms can be simulated, where they
can run either online or offline mode. (2) Pull or
push based data replication algorithms can be
simulated. (3) A data dissemination algorithm can be
evaluated together with a data replication algorithm
and job scheduling algorithm, or vice versa. (4) The
network traffic model is based on the flows due to
the file transfers. All network resources are treated
as the first class entities similar to the computing and
storage resources. As a result, the network
connectivity is transformed into a scheduled service.
(5) Its design is modular, extensible and layered to
provide for the maximum flexibility in simulating
different Data Grid system scenarios.
2 DGridSim
DGridSim is written in C++ programming language
using C++SIM20 discrete-event simulator library by
Mesquite Software. The C++SIM20 library allows
the development of process-oriented discrete-event
simulation programs. A program using C++SIM20
library models a system as a collection of
C++SIM20 processes which interact with each other
by using the C++SIM20 structures. The C++SIM20
structures that are used in DGridSim are the
following: process, facility, and event.
DGridSim is a simulator that has been designed
to achieve modularity, extensibility, and layered
architecture. Specifically, the layered architecture
means that DGridSim is built in layers with respect
174
Tando
˘
gan S., Do
˘
gan A. and Murat Kandemir C..
DGridSim: A REAL-TIME DATA GRID SIMULATOR WITH HIERARCHICAL JOB AND DATA SCHEDULING.
DOI: 10.5220/0003601501740179
In Proceedings of 1st International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2011), pages
174-179
ISBN: 978-989-8425-78-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
to the layered software architecture of real Grid
systems where the higher layers make use of the
functionalities provided by the lower layers.
DGridSim is composed of four layers: Basic Grid
Fabric, Communication, Main Grid Services, and
Applications. These layers as well as how advance
reservation mechanism is implemented for
computing, networking, and storage resources were
explained by Atanak, Tandogan and Doğan, 2010.
Note that without the advance reservation, it is
impossible to guarantee any form of quality of
service.
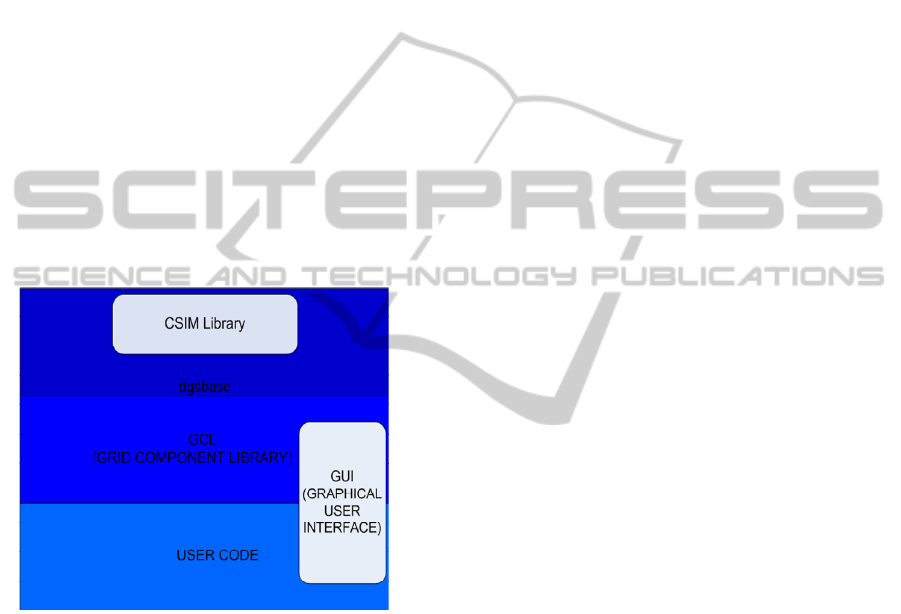
2.1 System Architecture
The system architecture of DGridSim is shown in
Figure 1. DGridSim is a layered software with a
well-defined object hierarchy. The hierarchy
between the objects is established using interfaces,
Abstract Base Classes in C++. This provides a
flexible and expandable environment for
researchers.
Figure 1: DGridSim system architecture.
At the bottom level, there exists CSIM. A Base
Layer containing low level simulation utilities, such
as registering events, advancing simulation time,
etc., has been developed using this CSIM
development kit. A Grid Component Library (GCL)
Layer defining interfaces and contracts for grid
services and grid models has been designed on this
Base Layer. The User Code Layer consists of the
standard and specialised implementations of the
interfaces defined in GCL Layer. A Graphical User
Interface Layer is planned for the future. The User
Code Layer is the layer for researchers to inject their
own implementations of different grid algorithms. If
predefined service contracts or grid models are not
adequate for the researcher, new interfaces should be
defined in GCL Layer. It is expected that no
intervention should be necessary to the Base Layer.
2.2 Service Architecture
Data Grid components can be divided into two main
groups, Resource Components and Service
Components. Resource Components do have
definite properties. For example, a Storage Element
can have properties such as storage space, read/write
bandwidth, and access latency, but do not have any
business logic (a Storage Element does not contain
any procedures). Since Resource Components are
passive components, Resource Managers are
required to perform necessary operations on them.
Following the CSIM terminology, Resource
Components are designed using facilities, and
Service Components are designed using processes.
Service Components can be based on three
different interfaces in DGridSim. Asynchronous
Service Base is designed to operate on a queue. This
queue can be a collection of grid jobs or data
transfer requests. Queue handling mechanism can be
triggered periodically or by a preconfigured event.
Scheduling Services are developed by extending
Asynchronous Service Base.
Synchronous Service Base provides its service
by simple function calls. Each function call can have
a cost which can be determined at run-time by
extending this base interface. Information Services
are usually developed on top of Synchronous
Service Base.
The third base is the combination of
Asynchronous and Synchronous Service Base and is
called as Hybrid Base. Hybrid Base controls a queue
and at the same time offers simple function calls.
Reservation Services are based on Hybrid Base
because they need to process the reservation requests
which are placed in a queue and also they need to
provide functions for committing or cancelling a
reservation request.
3 JOB SCHEDULING
DGridSim supports the simulation of hierarchical
Data Grid systems where a global scheduler (Grid
Scheduler) for the whole system and a local
scheduler (Site Scheduler) for each site are deployed
to manage the available computing resources.
3.1 Grid Scheduler
In DGridSim, all Grid schedulers are implemented
DGridSim: A REAL-TIME DATA GRID SIMULATOR WITH HIERARCHICAL JOB AND DATA SCHEDULING
175

as a part of Grid Scheduling Service (GSS). In order
to support the job scheduling activities, Grid
Scheduling Service interacts with some other global
services as follows:
1. Grid Job Submission Service (GJSS): GJSS
accepts the jobs submitted by the applications,
and invokes the scheduler.
2. Grid Job Dispatch Manager (GJDM): Once a
site has been determined for a job, GSS
informs GJDM for the submission of the job to
this site.
3. Grid Information Service (GIS): GIS provides
GSS (and Data Management Service) with all
sorts of static and dynamic information related
to the system.
4. Replica Location Service (RLS): RLS is
queried to find the physical location of all data
items available in the system.
3.1.1 Random
The Random algorithm is implemented as an online
algorithm in GSS as follows:
1. Once a new job is submitted to the system,
GJSS places it to a queue and invokes GSS.
2. GSS handles each job in the queue one by one.
For the current job, GSS randomly selects a
site and informs GJDM.
3. GJDM forwards the job to the selected site.
3.1.2 Earliest Deadline First
The Earliest Deadline First algorithm is realized as
an offline algorithm in GSS and it runs as follows:
1. Once a new job is submitted to the system,
GJSS places it to a queue. Then, different from
the online case, it invokes GSS periodically
with a predefined period.
2. Upon invoking, GSS handles all jobs in the
queue at the same time. GSS sorts the jobs in
the increasing value of deadline; randomly
selects a site in the sorted order for each job;
informs GJDM.
3. GJDM forwards the job to the selected site.
3.1.3 Minimum Completion Time First
The Minimum Completion Time First (MCTF)
algorithm is realized in GSS as follows:
1. When a new job is submitted to the system,
GJSS first places it to a queue. Then, it invokes
GSS immediately since MCTF is an online
algorithm.
2. GSS handles each job in the queue one by one.
For the current job, GSS sends an inquiry to
GIS to fetch p
i
(total computing power in
MIPS) and l
i
(average instantaneous computing
load in seconds) for all sites.
3. GSS computes the expected job finish times c
i
for each site, where c
i
= l
i
+ t
j
/p
i
and t
j
is the
number of instructions of the current job.
4. GSS selects the site with minimum job
completion time and informs GJDM.
5. GJDM forwards the job to the selected site.
3.2 Site Scheduler
DGridSim realizes all site schedulers as a part of
Site Scheduling Service (SSS). In order for Site
Scheduling Service to carry out the job scheduling
activities, it cooperates with other local services as
follows:
1. Site Job Submission Service (SJSS): SJSS
accepts the jobs submitted by GJSS, and
invokes the site scheduler.
2. Site Job Invoke Manager (SJIM): Once a
scheduling decision has been made for a job,
SSS informs SJIM about this job as well as the
related information, such as the computing
element chosen, job start time and duration of
execution. SJIM simulates the execution of the
job by creating a CSIM process which uses the
CSIM facility for the chosen computing
element for the duration of execution starting
from the start time.
3. Local Reservation Service (LRS): LRS holds
all the advance reservations made for the
computing/storage/networking resources in the
site.
4. Local Data Manager (LDM): LDM is the
facade of Local Data Management Service,
which is explained in Section 4. Local Data
Management Service has the responsibility of
making data available for the jobs running in
the site. LDM can provide the requested data
from the local storage element, or from a
remote one with the help of global Data
Manager.
3.2.1 Real-time Min-max
DGridSim currently supports an online site
scheduling algorithm, namely real-time Min-max.
The operation of SSS with real-time Min-max is as
follows:
1. Once a new job is received by SJSS, SJSS
places it to a queue and invokes SSS.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
176

2. SSS handles each job in the queue one by one.
For the current job, SSS sends an inquiry to
LRS asking for a free time-slot on each
computing element, where the slot start time is
the current time and the slot finish time is the
task deadline.
3. Local Reservation Service returns the time slot
with the latest start time for each computing
machine. Thus, this is the max operation.
Among the time slots returned by LRS, SSS
selects the computing element with the earliest
start time, which is the min operation.
4. Once a deadline satisfying time-slot is found,
SSS submits a data transfer request for the
job’s data to Local Data Manager, where the
data request deadline is set to the start time of
the time-slot.
5. If LDMS guarantees that the requested data
will be copied into the site before the data
request deadline, SSS considers the job to be
satisfied, and invokes SJSS. Otherwise, SSS
drops the job from the queue.
6. Site Job Invoke Manager enables running the
job in the time-slot determined by the
scheduler on the chosen computing element.
4 DATA SCHEDULING
DGridSim realizes data scheduling in hierarchical
fashion similar to the job scheduling. That is, there is
a global Data Management Service (DMS) for the
whole system, and a Local Data Management
Service (LDMS) for each site.
4.1 Data Management Service
In the DGridSim, Data Management Service (DMS)
coordinates the transfer of data from one site to
another. In doing so, DMS cooperates with some
other services.
1. Data Manager (DM): DM is the service point
of DMS for all sites in the Grid. That is, all
Local Data Management Services use DM to
submit a site-to-site data transfer request to
DMS.
2. Reservation Service (RS): When DMS finds a
feasible path for a data transfer request by
means of a data dissemination algorithm, a
specific bandwidth value must be reserved on
all links of the path. Thus, DMS sends a
reservation request to RS so that RS can make
these bandwidth reservations on the respective
links.
3. File Transfer Service (FTS): After DMS is
informed by RS that all reservations are
successful, DMS starts FTS in order to copy a
data item from one site to another.
4.1.1 Minimum Delay Feasible Path First
Data Management Service runs a data dissemination
algorithm, namely Minimum Delay Feasible Path
First (MD/FPF), to find a feasible path for each data
request. A path is considered to be feasible if and
only if it has the sufficient bandwidth to deliver the
data to its destination at its deadline. DMS realizes
MD/FPF as follows.
1. Once a site-to-site data transfer request is
received by DM, DM puts it to a queue and
invokes DMS. Thus, DMS runs in online
mode.
2. DMS handles each request in the queue one by
one. For the current data request, DMS sends
an inquiry to Replica Location Service to find
out all source sites where the requested data
item is located.
3. DMS fetches the information about available
link bandwidths and network topology from
GIS.
4. DMS computes the required minimum
bandwidth value: bw = (file_size)/ (request _
deadline – current _ time). Based on the
undirected graph model of the system due to
the network topology, DMS deletes all links
with an available bandwidth value less than bw
from the graph.
5. In the modified graph, DMS runs the Dijkstra’s
shortest path algorithm to find out a minimum
delay feasible path.
6. After finding a path, DMS submits a
reservation request to Reservation Service
which includes all the links on the path,
reservation start (current time) and finish
(request deadline) times, and bandwidth value
(bw).
7. If all reservations are succeeded, DMS calls for
File Transfer Service to start the site-to-site
data transfer over the reserved path. Otherwise,
this request is deemed to be unsatisfiable. In
either case, Data Manager informs LDMS
accordingly.
4.2 Local Data Management Service
Local Data Management Service (LDMS) is
decoupled from Site Scheduling Service and it
coordinates the site’s data services as explained
DGridSim: A REAL-TIME DATA GRID SIMULATOR WITH HIERARCHICAL JOB AND DATA SCHEDULING
177

below.
1. While a job is being scheduled by SSS, SSS
places a data request to Local Data Manager,
which is the LDMS’s service point to SSS.
LDM puts this request in a queue and invokes
LDMS.
2. For the current data request, LDMS contacts
with Local Replica Location Service and learns
if the requested data item(s) can be locally
provided.
3. For the data items which are already available
in the site, LDMS submits a reservation request
to Local Reservation Service. This request
includes the all the links from a local storage
element to the chosen computing element,
reservation start (current time) and finish
(request deadline) times, and bandwidth value
(bw).
4. For the unfound data items, LDMS sends a
data request to Data Manager so that these
items can be copied from some remote site(s)
into this site.
5. If all local reservations are successfully made,
and/or LDMS is informed by Data Manager
that the requested data item(s) will be available
at the task start time, Local Data Manager
notifies SSS with either positive/negative
acknowledgement accordingly.
5 EXPERIMENTS
Using DGridSim, the three Grid scheduling
algorithms were evaluated. With the start of the
simulation, a Data Grid system was created. The
system was assumed to have the following
properties. It has ten sites each of which includes
thirty-two heterogeneous computing elements and a
single storage element. The computing elements
have MIPS rating of U~[7500, 12500], where U~
means uniformly distributed, and the storage
elements have storage capacity of U~[175000,
225000] Mbytes. Furthermore, every site is
equipped with a gateway router to which all
computing and storage elements are connected. The
links between computing and storage elements and
their gateway have bandwidth of U~[750, 1250]
Mbytes/sec and U~[1750, 2250] Mbytes/sec,
respectively. Ten gateway routers are interconnected
by a randomly generated network topology
composed of ten routers and twenty-five links whose
bandwidths with an average bandwidth of U~[750,
1250] Mbit/sec.
After the creation of a Data Grid system, jobs
were produced. The jobs were characterized with job
size, deadline, and the number of data items. In the
base set of simulation studies, job sizes are
U~[3750000, 7500000] MI (Million Instruction),
deadlines are U~[750, 1250] seconds, and the
number of data items needed in order for jobs to
start their execution is just one. During the
simulations, jobs were submitted to the system with
a rate of one job per five seconds.
Initially, all two-hundred different data items
were assumed to be stored in a single (Tier-0) site
without any computing elements. Thus, all data are
distributed from this Tier-0 site to all other sites with
computing capability. Moreover, jobs are randomly
associated with the data items whose sizes are
U~[750, 1250] Mbytes.
Using DGridSim, a base set of results was first
established for the following parameter values:
Number of Jobs=1000, Mean Job Size=5000000 MI,
Mean Job Deadline=100 sec, Mean Number of Data
Items=1 and Mean Link Bandwidth=125
Mbytes/sec. Later, these parameters are varied and
the effects are observed and reported in Tables 1-3.
Each data in Tables 1-3 denotes the average
satisfiability (the ratio of number of jobs finished
before their deadlines to total number of jobs) in
three simulation runs.
Table 1 shows the effect of changing the number
of jobs submitted to the system from 1000 to 3000
on the algorithms. According to Table 1, all three
algorithms maintain a relatively stable performance
on average. Furthermore, Random and EDF have
shown very similar performance, and they are
slightly better than MCTF.
Table 1: Performance of the three grid scheduling
algorithms when the number of jobs is increased.
Number of Jobs
1000 1500 2000 2500 3000
Random 0.94 0.96 0.96 0.97 0.98
EDF 0.94 0.96 0.96 0.97 0.98
MCTF 0.92 0.90 0.89 0.92 0.85
Table 2 shows the impact of increasing the mean
job size from 5000000 (5 M) MI to 1000000 (10 M)
MI on the algorithms. According to Table 2,
increasing job sizes significantly degrades the
performance of MCTF. On the other hand, it seems
that both Random and EDF keep its performance at
a top level.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
178
Table 2: Performance of the three grid scheduling
algorithms when the mean job size is increased.
Mean Job Size (MI)
5 M 6 M 7 M 8 M 10 M
Random 0.94 0.95 0.97 0.96 0.97
EDF 0.94 0.95 0.97 0.96 0.97
MCTF 0.92 0.90 0.67 0.50 0.33
Table 3 shows the impact of increasing the mean
job deadline from 600 sec to 1000 sec on the
algorithms. According to Table 3, increasing
deadline clearly helps MCTF to improve its
performance. On the other hand, neither Random nor
EDF has experienced a significant variation in their
performance.
Table 3: Performance of the three grid scheduling
algorithms when the mean deadline is increased.
Mean Job Deadline (sec)
600 700 800 900 1000
Random 0.96 0.97 0.98 0.98 0.97
EDF 0.96 0.97 0.97 0.98 0.97
MCTF 0.55 0.69 0.89 0.90 0.92
Because of the space constraints, the other
simulation results are not reported in detail here.
Yet, the following trends were observed in those
results. When the mean number of data items is
increased from 1 to 5, all three algorithms have
shown deteriorating performances. This is a
somewhat expected result. That is, jobs need more
than one data item to be copied to the sites where
they are scheduled. While keeping the network
resources at a fixed capacity, meeting the deadlines
of increasing number of data transfer requests under
stringent timing constraints is difficult to maintain.
When the mean link bandwidth is increased from
25 Mbytes/sec to 200 Mbytes/sec, all three
algorithms have shown increasing performances.
While keeping the deadlines close to some fixed
value, increasing the mean link bandwidths enables
that the data transfer times will get shorter. Thus,
jobs will get higher chance of meeting their
deadlines, as observed in the table.
6 CONCLUSIONS
This study presented a novel all-in-one real-time
Data Grid simulator supporting advance reservation
to test the real time performance of the job
scheduling and data dissemination algorithms in a
Data Grid system. The design of DGridSim provides
a flexible environment for researchers working on
real-time characteristics of Data Grid systems. It
should be emphasized that the presented results
prove the correct operation of DGridSim. The
development of DGridSim continues in several
avenues, including the support for centralized and
distributed Grid models, new heuristics for job and
data scheduling and data replication.
ACKNOWLEDGEMENTS
This material is based on work supported by
Institute of Scientific and Technological Research of
Turkey under Grant
No. 108E232.
REFERENCES
Camaron, D. G., Millar, A. P., Nicholson, C., Schiaffino,
R. C., Zini, F., Stockinger, K., 2004. Analysis of
Scheduling and Replica Optimisation Strategies for
Data Grids using OptorSim. Journal of Grid
Computing, 2(1), 57-69.
Buyya, R., Murshed, M., 2002. GridSim: A Toolkit for the
Modeling and Simulation of Distributed Resource
Management and Scheduling for Grid Computing. The
Journal of Concurrency and Computation: Practice
and Experience, 14, 13-15.
Sulistio, A., Cibej, U., Robic, B., Buyya, R., 2008. A
Tookit for Modeling and Simulation of Data Grids: An
Extension to GridSim. Concurrency and Computation:
Practice and Experience, 20(13), 1591-1609.
Casanova, H., 2001. SimGrid: A Toolkit for the
Simulation of Application Scheduling. IEEE Int’l
Symposium on Cluster Computing and the Grid, 430.
Quetier, B., Cappello, F., 2005. A Survey of Grid
Research Tools: Simulators, Emulators and Real Life
Platforms. 17th IMACS World Congress.
Atanak, M. M., Tandogan, S., Doğan., A., 2010. A
Unified Model for Real-time Data Grids Supporting
Hierarchical Scheduling of Jobs and Data. Int’l
Conference on Modelling, Simulation, and
Visualization Methods.
Mesquite Software, (n.d.). User’s Guide: CSIM20
Simulation Engine (C++ Version). Retrieved May 23,
2011, from http://www.mesquite.com.
DGridSim: A REAL-TIME DATA GRID SIMULATOR WITH HIERARCHICAL JOB AND DATA SCHEDULING
179
