
REMOTE HUMAN-ROBOT COOPERATION VIA INTERNET
USING WEBOS-BASED TOUCH INTERFACE
Igor Belousov
Technology Solutions Group, Hewlett-Packard, 16A, Bld. 3, Leningradskoe Shosse, Moscow, Russia
Keywords: Human-robot interface, Web-based robotics, Dynamic environments, HP webOS open mobile platform.
Abstract: We consider at this paper the complicated task when the robot manipulator is controlled remotely via the
World Wide Web and has to catch the moving object. The robot working environment is non-structured and
dynamic. Neither classical teleoperation nor pure robot programming could solve the task of grasping the
moving object in such a case. We used the shared autonomy approach to implement the capture task. The
operator plans the capture at high level, and the capture is implemented by the robot using vision system.
Human-Robot Interface is based on HP webOS Open Mobile Platform using HP Pre or HP TouchPad
(tablet computer) as the operator consoles. Using the touch-based control interface and real-time 3D models
of the remote robot and working environment make the grasping operation effective, reliable and simple.
1 INTRODUCTION
Achievements at Web-based robot control open new
promising application areas for robotic technologies.
Web-based tele-maintenance in the industrial
settings (Lou and Lee, 1999), tele-surgery
(Hannaford, 2008), remote robot control in
hazardous environments (Hamel, 2001), remote
education in robotics and mechatronics (Tzafestas,
2009) can be mentioned as the examples.
Internet itself is the ideal but challenging
environment for experimentation and testing wide
class of robotic systems such as teleoperated and
distributed systems (Nuno, Basanez and Prado,
2009), networked robots, haptic interfaces. Internet
provides natural and mature technology for remote
experimentations, but challenges the researchers by
such complications as limited bandwidth,
unpredictable and variable time delays, losses of
data packages, security problems.
To address the issues imposed by Internet we
have developed several VR-based methods for
effective robot teleoperation (Belousov, 2007). It
comprises: (1) an environment for off-line and on-
line remote robot programming via the Internet
(Belousov and Clapworthy, 2002), and (2) a Java3D-
based on-line dynamic virtual representation of the
remote robot and its working area (Tan, Clapworthy
and Belousov, 2004). These methods allow the time
delays inherent in IP networks to be suppressed, and
the operator's work to be simplified and accelerated.
Systems for control of the PUMA 560 and CRS
A465 manipulators and mobile robot Nomadic
XR4000 via the Internet have been developed.
Systems were successfully tested under real Internet
conditions from different locations in Russia,
England, France, South Korea.
Robot teleoperation via the Internet is difficult
task due to above mentioned reasons. But it rises to a
higher level of complexity when we consider the
interaction not only with fixed but also with moving
objects. Such dynamic environments are quite
difficult to cope with, but at the same time are the
most important from practical point of view because
the real world systems and environments are
dynamic, changing and unstructured.
Due to complexity of this task there are just few
articles addressing the problem. In (Kikuchi, Takeo
and Kosuge, 1998) the authors used bilateral
teleoperation subsystem to grasp a moving object.
They considered several conditions limiting the
scope of the approach – only 2D motion of the
object, permanent and slow speed of the object to
grasp, and constant and small time delays.
More general approach was presented in
(Belousov, Sazonov and Chebukov, 2005). The
Web-based robotic system presented was able to
grasp a fast moving object performing arbitrary 3D
motion in unstructured environment. Vision system
341
Belousov I..
REMOTE HUMAN-ROBOT COOPERATION VIA INTERNET USING WEBOS-BASED TOUCH INTERFACE.
DOI: 10.5220/0003649403410344
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 341-344
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
and dynamic model of the object motion were used
to define and to predict the motion, and to perform
the grasping under supervision by human operator.
This approach allowed to develop sophisticated
algorithms for collision avoidance for the complex
robotic systems such as large space manipulators
(Belousov, Esteves, Laumond and Ferre, 2005) and
humanoid robots (Yoshida, Esteves, Belousov,
Laumond, Sakaguchi and Yokoi, 2008).
The main focus of the current work is
improvement of the system for Web-based robot
control in dynamic environment via the
enhancement of human-robot interaction using the
touch-based interface. It is based on HP webOS
Open Mobile Platform. The use of the touch-based
control interface and real-time 3D models of the
remote robot and working environment allows the
implementation of the grasping operation in natural
way. The operator plans the capture at high level
choosing for the robot the intermediate and final
goals (clicking on desired positions by a finger at the
touch screen with 3D scene model), and the capture
robot performs automatically.
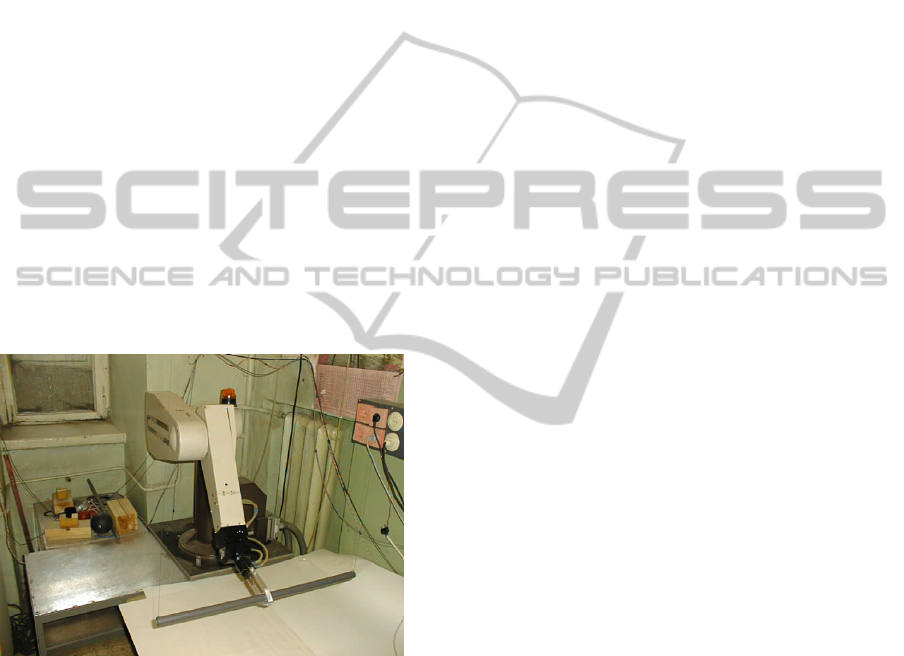
Robot manipulator PUMA 560 was used at these
experiments (Fig. 1).
Figure 1: Robot Manipulator PUMA 560. Grasping the
Rod on Bifilar Suspension.
At the chapter 2 shared autonomy approach for
the task of grasping the moving object is presented.
Third chapter contains description of the system
architecture, data flows as well as touch-based
interface and HP webOS platform used. Experiments
undertaken are presented at the forth chapter.
Chapter 5 concludes the article and describes the
future system development.
2 SHARED AUTONOMY
APPROACH FOR
HUMAN-ROBOT
INTERACTION IN DYNAMIC
ENVIRONMENTS
We consider at this paper the complicated task when
the robot manipulator is controlled remotely via the
World Wide Web and has to catch the fast moving
object. The robot working environment is non-
structured and dynamic. Neither classical
teleoperation nor pure robot programming could
solve the task of grasping the moving object in such
a frame. We used the shared autonomy approach to
implement the capture task, i.e. the scenario when
actions of the human operator and the robot are
shared – operator (client side of the system)
implements the high-level planning and the robot
(remote or server side of the system) performs the
requested operations with high precision and
accuracy. Such a sharing allowed solving a
complicated task of capturing the fast objects which
move under the action of natural forces, and the
initial conditions of the motion can be arbitrary.
Maximum object speed in our experiments was over
1.5 m/sec.
The object used was a rod on a bifilar suspension
(Fig. 1). The upper ends of the threads are attached
to a fixed beam. The rod can perform complicated
free motion in 3 modes.
The vision system (VS) contains two TV
cameras placed above the scene and at the side to
ensure sufficient visual data to determine the
parameters of the real motion of the objects.
The VS determines the coordinates, in the image,
of some characteristic points on the object, relative
to the camera reference frame. The use of fast
image-processing algorithms allows up to 30 sets of
measurements per second to be obtained. The data
are collected during a time interval and are subjected
to statistical processing, taking into account the
mathematical model of the object motion. This gives
the initial conditions of the motion of the object and
allows the motion to be predicted for several
seconds ahead. The result of the prediction is the
precise time and the required position of the robot at
which the desired operation with the object should
be performed.
3 SYSTEM ARCHITECTURE
In the last few years Web technologies demonstrated
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
342

the significant evolution. The most important trends
are standardisation based on HTML5 and CSS,
revolutionary improvements (run-time speed,
standartisation, cross-platform support) of
Javascript, move of the technology to mobile/
personal world with such amazing options as 3G/4G
fast Internet connection everywhere anytime and
touch-based interfaces on tablets and smartphones.
We decided to use all these advances and to develop
next generation of the system for Web-based robot
control in dynamic environment using these
technologies.
HP webOS – open Linux-based operating system
for mobile devices, - has been chosen (Allen, 2009).
It uses standard HTML5, CSS and Javascript for
applications development and provides good
opportunities for developers of remote teleoperated
robotics systems. Open operating systems with real-
time possibilities are extremely important for
developing robot control systems (Manchini and
Frontoni, 2009) and HP webOS is a good choice for
remote robot control from the mobile devices.
Other advantage of webOS is in its native
multitasking. The user experience is optimized for
launching and managing multiple applications at
once. HP webOS is designed around multitasking
and makes it simple to run background applications,
to switch between applications, and to easily handle
interruptions and events (Zammetti, 2009). These
features were used for the development of the client
part of the system.
The system contains 3 main parts – robot, server
and client. The robot part consists of the robot
manipulator and the robot controller. The server part
contains the server computer and TV cameras. We
have used Palm Pre smartphones and HP TouchPad
tablet as the client control devices. All the client
software is realised with open technologies
javascript and OpenGL ES. We used HP webOS
SDK 2.1 (Pre 2), and SDK 3.0 for TouchPad.
The robot controller was connected to the server
computer via RS232 serial interface.
Communication between the server and client parts
was performed using TCP/IP packages.
The software of the robot part of the system
provides communication with the server part (bi-
directional data exchange) and control of the robot
itself. It has been realised using VAL-type language.
The server part of the system contains the
software modules for the data exchange with both
the robot and the client parts, and a module for TV-
image processing.
The software of the client part consists of
modules for communication with the server, a
module for robot control, and the modules for
visualisation of the robot and working environment
– 3D graphic representation and TV images.
Important part of the client side is a human-robot
interface. The functional description is presented at
Chapter 4, but here it is important to emphasize that
it is build using HP webOS UI and provides rich
touch-based user experience in a simple and logical
way. It supports multi-touch and multiple gestures
such as tapping, flicking, swipe, dragging, scrolling
and others. This makes operator’s work comfortable
and natural.
4 EXPERIMENTS
We tested the above algorithms and control
environment to grasp the rod by the PUMA
manipulator when operator was located far away
from the robot and controlled it via the low-
bandwidth Internet connection.
At the start of the control program, the rod is
placed in the equilibrium position. A remote
operator can define the initial motion of the rod by
choosing in the on-line webOS-based Virtual
Environment (VE) any point on the rod surface
picking the point with the finger; robot hits that
point with a random speed to provide random
character of the oscillations. Operator observes the
rod motion in the VE and chooses in the VE the
desired grasping point and instant to begin the
grasping operation. Chosen values are transmitted to
the sever (i.e. robot) site and control program
automatically: 1) predicts the capture instant and
position of the manipulator gripper for that time, 2)
controls the capture, 3) checks the capture
implementation, and 4) decides to repeat capture in
the event of failure. Operator continues to observe
the rod oscillations and grasping process in VE and
can stop the control program and re-plan grasping
scenario if needed.
Operator used HP Pre 2/3 webOS-based
smartphones and HP TouchPad to control the remote
robot and the control interface is presented at Fig. 2.
Window with 3D models of the robot and the
environment is located at the right-hand side of the
picture. Since only several numbers should be
transmitted from the server to visualise the rod,
scene redraw was performed almost at real time
scale even for a low bandwidth connection.
Components of the robot control interface are placed
at the left-hand part of the picture.
System has been tested from different remote
REMOTE HUMAN-ROBOT COOPERATION VIA INTERNET USING WEBOS-BASED TOUCH INTERFACE
343

locations and proved to be an efficient and reliable –
grasping was performed in 100% cases.
Figure 2: Operator’s Control Interface on HP TouchPad as
the control device.
5 CONCLUSIONS
Complicated task of grasping the moving object by a
robot manipulator when controlling the robot via the
Internet has been solved. Use of the shared
autonomy approach (when operator forms initial
motion of the rod and plans grasping operation, and
robot performs final operation automatically)
allowed to suppress communication delay, and also
to use in appropriate proportion operator’s skills in
planning high-level operations and robot accuracy.
HP webOS-based HP Pre 2/Pre 3 smartphones
and TouchPad tablet were used as the control
devices by the operator for remote robot control.
And the operator used natural gesture manipulations
on the live 3D model of the scene for high-level
planning of the grasp operations.
Methods developed could be applied to the wide
class of the remotely controlled systems with the
delays in control loop.
Future work will be focused on adding the
modules for automatic obstacle avoidance, remote
programming of the robot in touch human-operator
interface and use of WebGL language (3D extension
for Javascript, http://www.khronos.org/webgl/) for
3D visualisation of the robot and its working
environment at HP webOS devices.
REFERENCES
Lou, R., Lee, J., 1999. Tele-Control of Rapid Prototyping
Machine Via Internet for Automated Tele
Manufacturing. In IEEE International Conference on
Robotics & Automation ICRA’99, Detroit (USA), May
1999, pp.2203-2208.
Kikuchi, J., Takeo, K., Kosuge, K. 1998. Teleoperation
system via computer network for dynamic
environment. In IEEE International Conference on
Robotics & Automation ICRA’98, Leuven (Belgium),
May 1998, pp. 3534-3539.
Bakers, P., Tso, K., 2000. Internet-based Operations for
the Mars Polar Lander Mission, In IEEE International
Conference on Robotics & Automation ICRA’2000,
San Francisco (USA), April 2000, pp.2025-2032.
Hamel, W., 2001. Observations concerning Internet-based
teleoperations for hazardous environments. In IEEE
International Conference on Robotics & Automation
ICRA'2001, Seoul (Korea), May 2001, pp. 638-643.
Hannaford, B., 2008. Telesurgery via Internet, Workshop
“New Vistas and Challenges in Telerobotics”, In IEEE
International Conference on Robotics and
Automation, Pasadena (USA), May 2008.
Tzafestas, S., 2009, Web-based Control and Robotics
Education, Springer, 296 p.
Nuno, E., Basanez, L., Prada, M., 2009. Asymptotic
Stability of Teleoperators With Variable Time-Delays,
In IEEE International Conference on Robotics and
Automation, Kobe (Japan), May 2009.
Manchini, A., Frontoni, E., 2009. RoboBuntu: A Linux
Distribution for Mobile Robotics. In IEEE
International Conference on Robotics and
Automation, Kobe (Japan), May 2009.
Belousov, I., Clapworthy, G., 2002. Remote programming
and Java3D visualisation for Internet robotics, SPIE’s
International Technical Group Newsletter, Vol. 11,
No. 1, February 2002.
Tan, J., Clapworthy, G., Belousov, I., 2004. The
Integration of a Virtual Environment and 3D
Modelling Tools in a Networked Robot System,
International Journal of Image and Graphics, World
Scientific Publishing Company, Sept. 2004, pp. 1-20.
Belousov, I., Sazonov, V., Chebukov, S., 2005. Web-
based Teleoperation of the Robot Interacting with Fast
Moving Objects, In IEEE International Conference on
Robotics and Automation ICRA'05, Barcelona (Spain),
April 2005.
Belousov, I., Esteves, C., Laumond, J.-P., Ferre, E. 2005.
Motion planning for the large space manipulators with
complicated dynamics. In IEEE/RSJ International
Conference on Intelligent Robots and Systems
IROS’2005, Edmonton (Canada), August 2005, pp.
3713-3719.
Belousov, I., 2007. Sidebar – Java3D for Web-based
Robot Control, Invited Article in “Advances in
Telerobotics”, Volume 30, 2007, Springer-Verlag.
Yoshida, E., Esteves, C., Belousov, I., Laumond, J.-P.,
Sakaguchi, T., Yokoi, R., 2008. Planning 3D
Collision-Free Dynamic Robotic Motion Through
Iterative Reshaping, IEEE Transaction on Robotics,
Vol.24, N°5, October, 2008, pp.1186-1198.
Allen, M., 2009, Palm webOS, O’Reilly, 2009, 432 p.
Zammetti, F., 2009. Practical Palm Pre webOS Projects,
Apress, 2009, 400 p.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
344
