
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE
Lamia Belouaer, Maroua Bouzid and Abdel-Illah Mouaddib
GREYC - CNRS (UMR0672), Universit
´
e de Caen, Basse-Normandie, ENSICAEN
Boulevard du Mar
´
echal Juin, 14032 Caen Cedex, France
Keywords:
Spatial representation and reasoning, Spatial ontology, Fuzzy information, Rules, Task and path planning.
Abstract:
This paper describes the integration of spatial knowledge in a planning problem. For example, in the case of
evacuation problem of a building during a fire, we must know the fastest paths (the shortest, least congested,
. . . ). Such applications require spatial knowledge to perform spatial planning. This planning taste becomes
more complex when knowledge are shared by many actors. Indeed, our interest concerns collaborative work
between agents, in particular the case of human-robot interaction. In such contexts, considering the space
information in planning, we use a spatial ontology called SpaceOntology which handles different representa-
tions and abstraction levels of spatial information. We integrate this ontology in the planning by defining a
formal language planning: Spatial-PDDL. Spatial-PDDL combines PDDL concepts with this ontology. Also,
we distinguish between three types of actions: non spatial, spatial and navigation actions.
1 INTRODUCTION
In this paper, we focus on the spatial knowledge man-
agement in planning problem where the tasks con-
sider spatial and non-spatial representations. Such
problems could be met in human-robot interaction.
Most typical scenarios include a human instructing
a robot to perform some actions on some objects in
the environment. To achieve this task, the human and
the robot establish a similar description of the con-
cerned environment. This requires not only that the
scene descriptions created by the robot and the human
match but also needs a system which can success-
fully mediate between these descriptions. However,
the space representation from human’s and robot’s
points of view is not the same. Indeed, the robot’s
spatial representation is numeric and the human’s spa-
tial representation uses natural language. The natural
language employs incomplete and fuzzy information
about space (for example, the book is near the bottle).
Thus, we propose to find a representation for planning
problems that can be used by robots to communicate
with humans, analyze scenes and build maps.
To do this, we use an ontology called SpaceOn-
tology (Belouaer et al., 2010). It permits a knowl-
edge representation for modeling space, spatial rela-
tions and fuzzy information. This ontology allows us:
a complex spatial description, an easy management of
various spatial aspects, an easily extensible structure
and to infer spatial information. It provides a struc-
tured knowledge about the environment to explore in
planning process.
Planning process in artificial intelligence is deci-
sion making about the actions to be taken. As input,
this process takes a planning problem (initial state and
goal state) returns a plan (a sequence of ordered ac-
tions) to solve this problem (achieve the goal state
from the initial state). To express spatial knowledge
in planning process, we need a formal language. We
use language PDDL (Ghallab et al., 1998) (Planning
Domain Definition Language).
We propose a planner incorporating spatial rep-
resentation and reasoning by integrating SpaceOntol-
ogy. SpaceOntology in the planning, is not used for
verification or control, but as information needed for
planning. We adapt the PDDL actions and concepts
definition to express spatial information if it is nec-
essary. In other words, we extend PDDL to spatial
knowledge: Spatial-PDDL.
The rest of paper is organized as follows. Sec-
tion 2 gives an overview about different approaches
to solve planning problems taking spatial knowledge
into account. Section 3 describes the spatial repre-
sentation and reasoning. Section 4 describes the plan-
ning process with spatial knowledge and its impact on
complexity. Section 5 presents some results. Finally,
we conclude in Section 6.
71
Belouaer L., Bouzid M. and Mouaddib A..
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE.
DOI: 10.5220/0003654400710080
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2011), pages 71-80
ISBN: 978-989-8425-80-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
Different techniques for spatial representation and
reasoning have been proposed. Most are based on
constraints, logical and algebraic approaches (Bal-
biani et al., 1999). However, these approaches can not
manage numeric, topological and imprecise knowl-
edge at the same time. In planning, we need to com-
bine these knowledge. Thus, we must use an unified
framework to cover large classes of problems and to
give rise to instantiations adapted to each particular
application. Ontologies appear as an appropriate tool
toward this aim.
Spatial ontologies can be found in some fields
such as Virtual Reality (Dasiopoulou et al., 2005),
Robotics (Dominey et al., 2004), etc. All these on-
tologies are focused on the representation of spatial
concepts according to the application domains. A
major weakness of usual ontological technologies is
their inability to represent and to reason with impreci-
sion. An interesting work presented in (Hudelot et al.,
2003) overcomes this limit.
The concept of exploiting ontology to represent
spatial knowledge in planning has been explored.
(Bouguerra et al., 2008) describes a new approach
for monitoring the execution of plans where spatial
knowledge is defined by an ontology called LOOM.
This ontology permits a region classification and ver-
ifies the plan execution. However, it does not describe
spatial relations and it is not used in planning.
To express spatial knowledge in planning process,
we use PDDL (Ghallab et al., 1998). The first version
of PDDL is extended to consider several aspects in a
planning problem definition that improve the quality
of the solution, such as the temporal dimension (Fox
and Long, 2003). Despite the importance of the spa-
tial dimension in planning problem, PDDL with spa-
tial definition is not yet integrated.
Our main contribution is the extension of PDDL to
spatial knowledge: Spatial-PDDL. To do this, we use
SpaceOntology that considers several spatial knowl-
edge aspects; the space hierarchy, spatial relations
(numeric, topological and fuzzy).
3 SPATIAL REPRESENTATION
AND REASONING
In the following, we present SpaceOntology (Be-
louaer et al., 2010), a framework for spatial represen-
tation and reasoning.
3.1 Spatial Representation
We opted for OWL
1
DL
2
(Baader, 2003) as a formal
language
3
. An important characteristic of DL is its
expressivity and its capability of inferring knowledge
from the known information.
Regions
HasRelation
WithIntersection
Thing
TopologicalRelations
VerticalRelations HorizontalRelations
FuzzyDistance
NumericDistance
DistanceRelations
Space
SpatialRelations
AxisRelations
HasRelation
Figure 1: Graphical representation of SpaceOntology.
A spatial entity is described by two concepts
Regions and Space. The concept Space (Spacev
Thing) is used to model space: the name of places,
the hierarchical level, the boundaries definition, etc.
It represents a global environment (a country, a city,
a building, . . . ). The concept Regions (Regionsv
Space) is a sub-space included in a given space. A
region is itself considered as a space that can be de-
composed into different sub-regions. From a geomet-
ric point of view, a region rg is defined by the small-
est rectangle rect corresponding to its axis-aligned
bounding rectangles. These concepts include some
attributes. The hierarchical space organization has an
impact on the distance evaluation. Indeed, the dis-
tance of 10 meters in a city is considered as close,
however in a corridor this distance is considered as
far. Each region has the attributes alpha and beta
depending on the scale of its level. These two pa-
rameters evaluate the distance between two spatial ob-
jects (Belouaer et al., 2010) (section 3.2.3).
A spatial relation is defined by the concept
SpatialRelations (SpatialRelationsv Thing)
which includes TopologicalRelations and
DistanceRelations. A spatial relation is a
concept on its own. A Topological relation
(TopologicalRelations) is an ABLR rela-
tion (Laborie et al., 2006). This relation is a couple
hr
X
, r
Y
i, where: r
X
∈ {L, O
L
,C
x
, I
x
, O
R
, R} and
r
Y
∈ {A, O
A
,C
y
, I
y
, O
B
, B}. A Distance relation
(DistanceRelations) can be an Euclidean distance
(NumericDistance) between the symmetry points
of two rectangles representing two regions (r referent
object and ε target object) noted d(ε, r) (in R
+
)
1
Web Ontology Language
2
Description Logics
3
All notations used here are defined in the DL.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
72
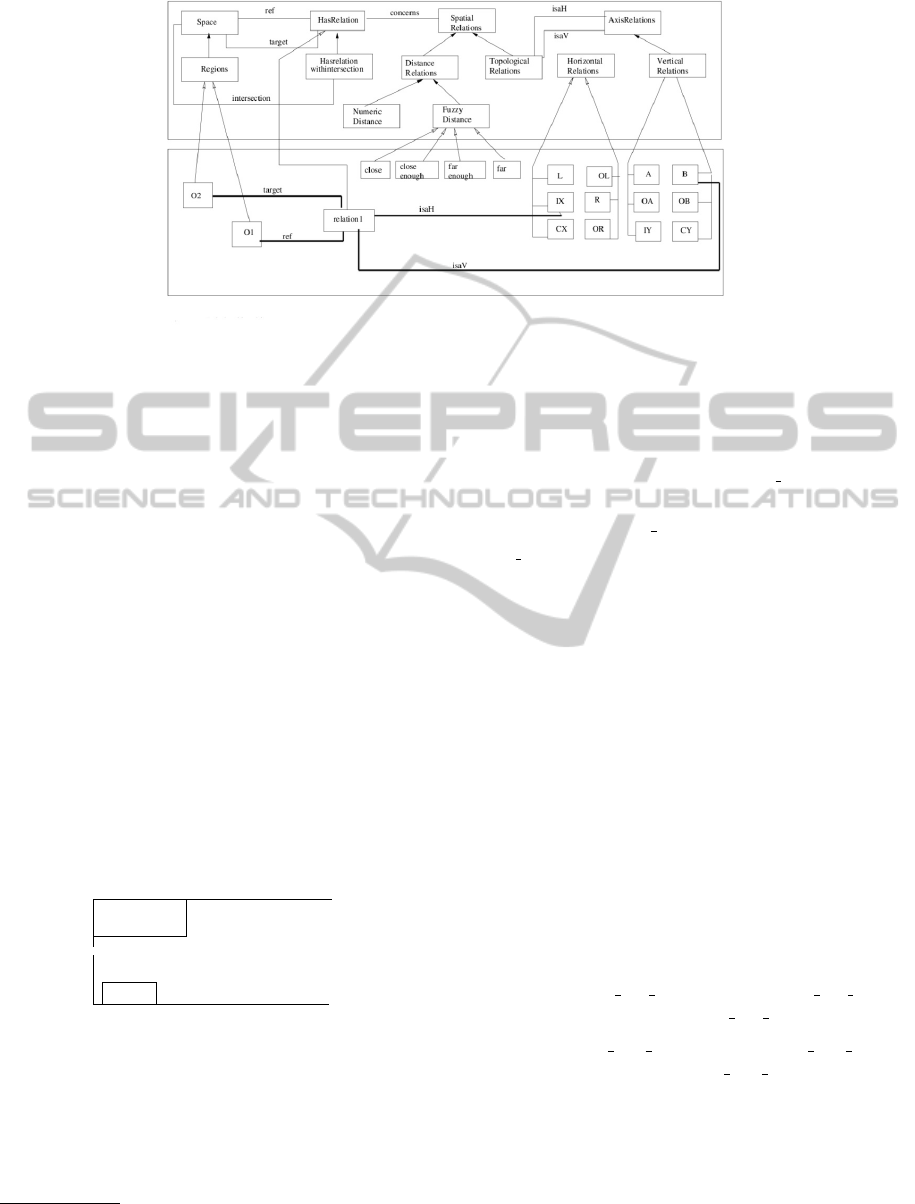
Figure 2: Graphical illustration of SpaceOntology to describe structures in specific domains.
or fuzzy distance (FuzzyDistance) evaluating a
distance between the symmetry points of two rect-
angles representing two regions. A fuzzy distance
is defined by four linguistic variables: close to,
close enough, far enough and far.
To define a spatial relation between spatial enti-
ties, we use the concept HasRelation. This concept
links with a spatial relation between a reference re-
gion and one or more target regions (Example 1).
There are several relations (or predicates) to link
these concepts to provide a spatial semantic. For ex-
ample to express a hierarchical relation between two
regions, we consider the links:
• consistsOf:
Space v Thing u ∃ consistsOf.Regions
u > 1 consistsOf
• isPartOf:
Regions v Space u ∃ isPartOf.Space
u > 1 IsPartOf
Example 1. Let us consider a part of a floor with two
offices (O1, O2) and a hall (H1) (Fig. 3).
O1
O2
H1
Figure 3: Partial Map.
Figure 2 models
4
the space domain defined in
Figure 3 by using SpaceOntology. We consider that
each spatial entity is a Regions concept. Then, spa-
tial relation between these different spatial entities
are described by combining SpatialRelations and
HasRelation.
4
For more readability, we omit certain classes and at-
tributes.
In Example 1, the relation1 is an instance of the
concept HasRelation describing the topological re-
lation between offices O2 and O1:
relation1:HasRelation
u ∃ concernsSpatialRelation.inside below
u ∃ hasReferent.O1 u ∃ hasTarget.O2
The relation inside below is defined as follow:
inside below:TopologicalRelations
u ∃ isAnHorizontalRelation.I
x
u ∃ isAVerticalRelation.B
3.2 Spatial Reasoning
The reasoning methods infer spatial information in
order to enrich the description of the environment
and/or to manage the lack of information.
3.2.1 Spatial Hierarchical Reasoning
To express a hierarchical relation between two re-
gions (for example, a region includes another region,
or a region is in another one), we use the predicates
consistsOf and isPartOf. The predicate isPartOf
is the inverse of the relation consistsOf. These rela-
tions are transitive. The transitivity rules for the pred-
icate consistsOf and isPartOf are:
consistsOf(r 1,r 2) u consistsOf(r 2,r 3)
−→ consistsOf(r 1,r 3)
isPartOf(r 1,r 2) u isPartOf(r 2,r 3)
−→ isPartOf(r 1,r 3)
To consider a space as a whole with the different
abstraction levels is not always necessary and makes
spatial reasoning very expensive. The hierarchical or-
ganization can simplify this reasoning, depending on
abstraction level. To do so, we exploit the two pred-
icates: consistsOf and isPartOf in order to define
the function hierarchical interest zone denoted Z
l
(r).
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE
73

This function Z
l
(r) defines an interest zone (An in-
terest zone defines a region in a considered space to
be reached and/or localized) of a region r in the hier-
archical level l. To compute this function we query
SpaceOntology (details in Section 4.2.1).
3.2.2 Spatial Reasoning based on Topological
Relations
In order to enrich SpaceOntology with new knowl-
edge, we consider two different aggregations of spa-
tial relations: combination ⊕ and composition ⊗.
The Combination Mechanism. The combination
concerns topological relations. As mentioned, a topo-
logical relation is a couple hr
X
, r
Y
i. This mechanism
consists of combining horizontal relation r
X
with ver-
tical one r
Y
( r
X
⊕ r
Y
). This mechanism is defined
by a set of rule proposed in SpaceOntology. Rules
definition for the combination mechanism is used in
order to define the 36 topological relations of ABLR
(Neighborhood graph (Laborie et al., 2006)), dynam-
ically. These relations express topological relations
(overlaps, touch, . . . ) and orientation relations. In-
deed, by this mechanism we can represent the 8 car-
dinal relations (left, above, above left, . . . ) and other
directional relations as at the same level, between, etc.
Figure 4 presents a rule which allows the combination
of the horizontal relation L(Le f t) and the vertical re-
lation A(Above).
isATopologicalRelation(?t relation)
u isAVerticalRelation(?t relation,"A")
u isAnHorizontalRelation(?t relation,"L")
−→ is(?t relation,"left above")
Figure 4: Rule definition for left above.
The Composition Mechanism. The composition
mechanism infers new spatial information. Let us
consider three regions defined by three rectangles
rect1, rect2 and rect3. The idea is to infer which re-
lation R3 links between rect1 and rect3 where R1 is a
relation between rect1 and rect2 and R2 is a relation
between rect2 and rect3. The topological relation R
3
is defined by R3 = R1 ⊗ R2, then
hrx3, ry3i = hrx1, ry1i ⊗ hrx2, ry2i (1)
= hrx1 ⊗ rx2, ry1 ⊗ ry2i (2)
The composition results of (rx1 ⊗ rx2) and (ry1 ⊗
ry2) are given by the composition table of rectangle
algebra by preserving the directionality property as
defined in ABLR. Formally, we define in SpaceOn-
tolgy a set of rules reflecting the composition table.
The composition mechanism returns a disjunction of
possible relations between two rectangles. However,
not all inferred relations are valid. To reduce the num-
ber of possible relations between two rectangles, by
keeping only the valid relations, we proceed as fol-
lows. First, we select the necessary knowledge for the
inference and we formalize it as a constraint network
called spatial relation network. Then, we apply the
required rules, and we complete this network. Thus,
a network is defined by :
• V a set of nodes representing rectangles describ-
ing regions,
• C a set of constraints representing topological re-
lations. An arc is labeled by a topological relation
(constraint) between two rectangles connected to
this arc. Arcs labeled with disjunctions are arcs
that are inferred by composition.
The idea is to remove all spatial relations does
not ensure the consistency of the network. Thus, we
aim to establish arc consistency in this network. We
produce an equivalent network to the first one which
checking the arc consistency property (Def. 1).
Definition 1. A network is arc consistent if all its arcs
are arc consistent
Thus, the network produced is arc-consistent, i.e.
it does not contain topological relations does not en-
sure the arc consistency of the network. Practically,
for the rules application, we use the Pellet inference
engine (Sirin et al., 2007), and for the verification
of the arc consistency, we rely on the MAC algo-
rithm (Prosser, 1995).
Example 2. Let us consider the following problem,
a robot is in the office o2. Its mission is to go to the
office o3 . However, it has no spatial information en-
abling it to define its trajectory between o2 and o3.
H1
O1
O3
Figure 5: Spatial Relation Between o1 and o3.
We have a set of spatial information, depicted
in Figure 5: the office o3 is right and is overlaps
above the office o1: o3hR, O
A
io1. Also, in Figure 3,
the office o2 is inside and is below of the office o1:
o2hI
x
, Bio1.
Our goal is to found the spatial relation between
the offices o3 and o2. First, we apply a symmetry rule,
then, o1hL, O
B
io3 is the inverse of o3hR, O
A
io1. Sec-
ond, we apply composition rule between o2hI
x
, Bio1
and o1hL, O
B
io3 (Fig. 6).
Thus, from this information we can plan our tra-
jectory to reach the office o3 without considering
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
74

translate(?link,?t link) u translate(?relation, ?t relation) u concerns(?link,?relation)
u hasTarget(?link,?tgt) u hasReferent(?link,?ref) u isANumericDistance(?relation)
u isPartOf(?ref,?region) u isPartOf(?tgt,?region)
u swrlb:greaterThan(distanceValue(?relation),0)
u swrlb:lessThanOrEqual(distanceValue(?relation),alpha(?region))
−→
[concerns(?t link,?t relation) u hasTarget(?t link,?tgt) u hasTarget(?t link,?tgt)
u hasReferent(?t link,?ref) u isAFuzzyDistance(?t relation) u is(?t relation,"close")]
Figure 7: Rule Definition of Def close relation.
isATopologicalRelation(?t relation1)
u isAnHorizontalRelation(?t relation1,"I X")
u isAVerticalRelation(?t relation1,"B")
u isATopologicalRelation(?t relation2)
u isAnHorizontalRelation(?t relation2,"L")
u isAVerticalRelation(?t relation2,"O B")
−→ [isATopologicalRelation(?t relation3)
u isAnHorizontalRelation(?t relation3,"L")
u isAVerticalRelation(?t relation3,"B")]
Figure 6: Rule definition for left below with composition.
the entire second floor but only the northeastern part
of the floor from the office o2. The information
o2hL, Bio3 is added in SpaceOntology.
3.2.3 Spatial Fuzzy Reasoning
In this work, the fuzzy representation concerns only
distance relations. Indeed, we use linguistic variables
to evaluate a distance (close, close enough, far enough
and far). We aim to give a numeric representation to
each variable and vice versa. SpaceOntology allows
this translation, by defining some rules based on func-
tions N
α,β
and F
α,β
(Schockaert, 2008). The function
N
(α,β)
(p, q) (resp. F
(α,β)
(p, q)) measures the degree
with which p is close to q (resp. the degree with which
p is far from q) (α, β > 0).
0
1
d(p,q)
N
,
p ,q
F
,
p , q
Figure 8: Distance evaluation. (1) if d ∈ [0, α] , then d is
close , (2) if d ∈]α, α +
β
2
] then d is close enough, (3) if
d ∈]α+
β
2
, α+β] then d is far enough, (4) if d ∈]α+β,+∞[
then d is far.
Figure 8 illustrates the translation of a distance
from a numeric definition to symbolic definition and
vice versa. The parameters α and β allow us to eval-
uate the numeric distance. These parameters depend
on the current region. Figure 7 is a rule allowing us to
evaluate a distance relation.
The rule Def
close relation (fig. 7) translates a
numeric distance (NumericDistance) (distanceValue
(?relation)) in symbolic evaluation (FuzzyDistance)
given by the instance close which indicates the close
relation. This rule is apply for distance (distanceValue
(?relation)) between 0 and α.
4 SPACEONTOLOGY BASED
PLANNING
Now, we explore the potential uses of spatial repre-
sentation and reasoning offered by SpaceOntology in
planning. Our goal is to propose a planner incorpo-
rating spatial representation and reasoning: Spatial
Planner (Fig. 9).
domain
initial state
goal
a1
a2 an
....
plan
Planner
task planner
path planner
SpaceOntology
Figure 9: Spatial Planner.
As input, the spatial planner (Fig. 9) takes a plan-
ning problem defined by:
• a domain is a set of actions. Each action specifies
preconditions that must be present in the current
state so it can be applied, and effects on the current
state,
• a description of the initial state of a world,
• a description of a goal.
As output, it generates a plan: a sequence of actions.
This planner consists of a task planner and a path
planner and SpaceOntology. The task planner’s aim
is to define the sequence of actions which will be ex-
ecuted to achieve the goals of the entry problem. Path
planner defines possible paths to reach the execution
of tasks to accomplish. It finds a path between two
positions (fuzzy positions or well defined positions).
SpaceOntology manages spatial information about the
space.
There is a communication between these compo-
nents (Fig. 9). This communication is in the form of
queries/answers. These one is in charge of planners
which at some steps require spatial preconditions to
be satisfied. To this end, it sends a query to SpaceOn-
tology to answer to the request.
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE
75

Example 3 (Study Case). A team (human and robot)
is in the office O
B
1
11
in the first floor of the building B
1
(the human position is h) (Fig.10). The human asks
the robot to pick up a book (b) located in the office (o)
close to the coffee machine. This machine is on the
second floor of the building B
6
(Fig.10).
B1
B2
B3
B4
B5
B6
c6
c2
c4
c5
c1
c3
Figure 10: Abstract Map.
B1
B2
B3
B4
B5
B6
c6
c2
c4
c5
c1
c3
Figure 11: Deadlocks.
The robot’s goal is to fulfill this mission. A clas-
sical task planner provides: (1) go-to(o
B
1
11
,o), (2)
take(b), (3) go-to(o,h), (4) give(b) as a plan.
Several problems requiring spatial information are
identified: (1) in which position the robot should exe-
cute an action ( go-to(o
B
1
11
,o)). The office o is de-
fined as the office close to the coffee machine, i.e.
how to evaluate the relation close to the coffee ma-
chine? (2) how to move between different areas to ac-
complish actions? i.e to define the robot’s navigation
during and between each action; for example, finding
a path between the current position o and the human
position h. (3) how to order the action execution with
respect to navigation?
To solve this problem, we use the Spatial Plan-
ner (Fig. 9). This planner requires different types of
knowledge encoded in Spatial-PDDL. It is an exten-
sion of PDDL with spatial information made by the
communication between planners (task and path plan-
ner) and SpaceOntology (Fig. 9). We focus here on
Spatial-PDDL definition and the planner operation.
4.1 From PDDL to Spatial-PDDL
We extend PDDL with spatial knowledge using
SpaceOntology in order to improve the expressiveness
of the planning language. Formally, SpaceOntology is
a triple (Φ, R, I), where Φ is a set of concepts, R is a
set of relations (or predicates) between concepts and
I is a set of instances which depends on the described
environment.
Our planner takes three inputs (Fig. 9). (1) An ini-
tial state S
0
, (2) a goal state S
G
; these states describe a
set of objects (O) by specifying their type (T ) and re-
lations between them (Π), (3) A set of actions (A) de-
scribed in a domain (D). We extend PDDL language
with SpaceOntology.
4.1.1 Notations
The main extensions are summarized in Table 1.
Table 1: Extended Notions with SpaceOntology Elements.
Notions PDDL Extend PDDL with SpaceOntology
Predicate Π Π ← Π ∪R
Type T T ← T ∪ Φ
Domain D use of extends and @ns
Objects O spatial/non spatial objects
Actions A non spatial/spatial/navigation actions
A concept, a relation or an instance always has
a prefix. (Dou, 2008) expresses that the domain is
extended by an ontology, where the notion of “ :
extends” and “@ns1 : ” were introduced. Each con-
cept in SpaceOntology defines a spatial type. All
the concepts defined in SpaceOntology (Φ) are intro-
duced and exploited for extending PDDL (Table. 1).
A predicate π (π ∈ Π) expresses a relation. All the re-
lations (R) defined in SpaceOntology are introduced
and exploited for extending PDDL (Table. 1).
Our contributions concerning the action defini-
tion consist of the extension of geometric precondi-
tions/effects in order to take the different spatial rep-
resentations (topological and fuzzy information) into
account. In addition, it consists of the definition of the
spatial fuzzy actions (Def. 2).
Definition 2 (A Spatial Fuzzy Action). A spatial
fuzzy action a is defined by a = ( at , pr,
q, e) , where : at, pr and e are respectively pa-
rameters for the action, preconditions, effects as de-
fined in the extended action (Guitton, 2010) and q is
a set of queries.
Example 4. The semantic of the action take
(Fig. 12) is: the robot r takes the book b located in
the office defined in a fuzzy way ?o. The office ?o
is defined in Spatial-PDDL as a query variable (Dou,
2008).
take(r,b,?o)
(robot r) (book b)(empty-arm r)
(¬(has r b))(region ?o)(At r ?o)
(:query
(freevars (?o - Region ?α ?β -@xsd:int
?rel - SpatialRelations ?hr - HasRelation)
(and(@ns:isPartOf ?o Z
Level(C M )−1
(CM ))
(@ns:hasTarget ?hr ?o)(@ns:hasReferent ?hr CM)
(@ns:concernsRelation ?hr ?rel)
(if(instanceOf ?rel NumericDistance)
(and(owl:DatatypeProperty rdf:ID="α" ?α Z
Level(C M )
(CM ))
(owl:DatatypeProperty rdf:ID="β" ?β Z
Level(C M )
(CM ))
(bounded-int owl:DatatypeProperty rdf:ID="distance" ?α (?α+ ?β))))
(if(instanceOf ?rel FuzzyDistance) (= ?rel "close_to")))))
(At r p
r
)(@ns:isPartOf p
r
?o)
(bounded-int distance(p
r
r.arm , b), ?α
o
, ?β
o
)
(:query
(freevars (?α
o
?β
o
-@xsd:int)
(and(owl:DatatypeProperty rdf:ID="α" ?α
o
?o)
(owl:DatatypeProperty rdf:ID="β" ?β
o
?o))))
(frontOf r.arm, b) (sameLevel r.arm,b)
(¬(empty-arm r) (has r b)
Figure 12: Modeling the Action take in Spatial-PDDL.
To delimit this region, we query SpaceOntology
(details in Section 4.2.1). The fuzzy relation close
can be described in a numeric way. So, we seek an
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
76

office satisfying the fuzzy relation close by translat-
ing it in a numerical representation (Belouaer et al.,
2010). Moreover, the action execution requires that
the precondition (At r p
r
) is satisfied. However, the
satisfaction of this precondition requires the definition
of the position p
r
. This position is defined as follows.
First, it must be in the office ?o. Then, it must al-
low us to reach the target; the book. This requires
that the robot is at a position p
r
close to the book.
The evaluation of this distance is made by the func-
tion bounded-int. Also, there are two functions like
frontOf and sameLevel which must be satisfied in
order to grab the book.
4.1.2 Integrating SpaceOntology in PDDL:
Spatial-PDDL
We translate any spatial knowledge described in
SpaceOntology to the domain and problem definitions
in PDDL. SpaceOntology has an open world assump-
tion and PDDL a closed one. To overcome this diffi-
culty, the translation concerns only known types.
Our model requires as an input : (1) a planning
domain describes each action of a system in Spatial-
PDDL, (2) a planning problem describing the initial
state and goals in Spatial-PDDL, (3) SpaceOntology
gives spatial description of space, and (4) some re-
quired information.
Definition 3 (A Domain). A planning domain D =
(A, Π), where A = {a
1
, a
2
, . . . , a
n
} a set of actions,
where a
i
is an action and Π set of relations between
objects O.
Definition 4 (A Spatial Planning Problem). A Spatial
Planning Problem P = < O, S
0
, S
G
>, where O is a
set of spatial and non-spatial objects, S
0
is an initial
state that could be associated to fuzzy position and
S
G
is the goal state that could be associated to fuzzy
position.
In Figure 13, some objects are spatial (:regions
O
B1
11
CM ?o), others are non spatial (:objects
human robot book). The initial state expresses an
initial symbolic situation human has not the book
(not (has human book)). Also, it expresses the
initial spatial situation the robot is in the office O
B1
11
(At robot O
B1
11
).
Note by “?α” and “?β” query variables to deter-
mine the α and β of the current level. The relation
owl:DatatypeProperty rdf:ID="β" identifies for
a given region the β (Fig. 13).
The fuzzy spatial information the office close to
the coffee machine is defined by a query variable:
“?o”. There are some functions. (distance?ip?t p −
position) used to compute the Euclidean distance
between two positions. (maxhdistance) (resp.
(define (problem bookmissionpb)
(:domain bookmission)
(:objects
Arnaud - human
Bobo - robot
book table - item
o11b1 - region
?target - region ;; fuzzy region)
(:init
(on book table)
(At Arnaud o11b1)
(At Bobo o11b1)
(At table ?target)
(Empty Arnaud)
(Empty Bobo)
(= (maxhdistance) 1)
(= (minhdistance) 0.5)
(not (Holding Arnaud book)
)
(:query
(freevars (?target - region ?α ?β -@xsd:int)
(and ( In ?target Z
Level(cm)−1
(cm)
(owl:DatatypeProperty rdf:ID="α" ?α Z
Level(cm)
(cm))
(owl:DatatypeProperty rdf:ID="β" ?β Z
Level(cm)
(cm))
(bounded-int distance(?o, cm) ?α (?α+ ?β)))))
)
(:goal ( and
(not(on book table))
(Holding Arnaud book))))
Figure 13: An Example of Spatial-PDDL Problem.
(minhdistance)) indicates the maximum distance
(resp. minimum) from which the interaction with hu-
mans can not be executed. path (Fig. 14) checks the
existence of a path and computes it.
(define (domain bookmission)
(:requirements :typing :fluents)
(:extends
(uri ".../SpaceOntology.owl" :prefix sponto))
(:types actor - object
item - object
human robot - actor)
(:spatial-types region - @sponto:Regions)
(:predicates (Empty a - actor)(Holding a - actor i - item)
(on i - item t - item)))
(:spatial-predicates (At o - object p - region))
(:functions (distance ip tp - position)(maxdist)(mindist)
(maxhdist)(minhdist)(path irg trg - region))
(:action go
:parameters(r - robot irg - region trg - region )
:precondition (and(At r irg)(not(At r trg)))
:spatial-precondition (=(path irg trg)true))
:effect(and(At r trg) (not(At r irg))))
(:action pick-up ...)
(:action put-down ...)
(:action give ...)
(:action take ...))
Figure 14: An Example of Spatial-PDDL Domain.
4.2 Communication between
Components
The planner has three components: task planner, path
planner and SpaceOntology. The communication be-
tween them is in form of request/response. Planners
(task and path) formulate queries to spatial ontology.
They are encapsulated in the preconditions of the ac-
tions or they are directly in the problem definition.
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE
77

In this section, we start by specifying the types of
queries necessary for the planner function. Then, we
describe the operation.
4.2.1 Requests for SpaceOntology
Several types of queries that are needed for the system
operation. We can classify them into three categories:
Adjacency query, Proximity Query and Hierarchi-
cal Interest Zone Query
Adjacency Query. We assume that each region is
adjacent to its neighbors with access points (doors,
intersection of corridors, . . . ) called gates. A gate
allows transitions between adjacent regions (in the
same hierarchical level or in different hierarchical lev-
els). A gate allows us to connect more than two re-
gions.
Two regions are adjacent if there is a/or a set of
transition between these two regions. Two types of
adjacency: direct adjacency (i.e, the longer of the
path between these two regions is equal to 1 (number
of gates), of course several possibilities may exist, this
represents a multiple choice of paths) and indirect ad-
jacency (i.e, the longer of the path between these two
regions is more than 1 (number of gates))
To extract the gates between regions or neigh-
bors for a given region, we use adjacency query to
SpaceOntology.
SELECT ?referent ?target "
WHERE {"?x ns:label ?relation."
"?x ns:hasintersection \"gate\"."
"?x ns:hasReferent ?referent. "
"?x ns:hasTarget ?target."}
This query takes as parameter a gate (gate) and
defines the regions connected to this gate. The indi-
rect adjacency is inferred by the existence of a path
(of length greater than one see next section).
Proximity Query. A proximity query defines re-
gions that are close to a given region or if a region
is near or far from another region.
SELECT ?referent ?target "
WHERE {"?x ns:concerns \"close\"."
"?x ns:hasReferent ?referent. "
"?x ns:hasTarget ?target."}
This query takes a parameter relation (close) and
defines the regions that are close.
Hierarchical Interest Zone Query. To define the
function Z
l
(r), we define the hierarchical interest
zone query.
SELECT * "
WHERE {"?region rdf:type ns:Regions ."
"?region ns:label \"" + rg +"\" ."
"?region ns:isPartOf ?father . "
"?father ns:level ?level." }
"Filter ( ?level = " + level + " ).
This request is used to return the area of interest
for the region rg level hierarchical level.
4.3 Spatial Planning Process
During the selection of these actions, the planner
asks the satisfaction of these preconditions using
SpaceOntology. Then, it calculates the required dis-
placements and returns an answer to the result thereof.
If the navigation is possible so action can be executed.
Otherwise another action must be found to achieve the
mission. The execution of the action take the book
(Fig. 12) requires that the robot is in the office close to
the coffee machine (in which the book is). However,
the robot is in another office : O
B1
11
. Thus, a naviga-
tion between the current position and target position
is required. The target position is defined in a fuzzy
way. Formally, we assume that the general planning
problem includes a fuzzy path planning problem.
Definition 5 (Fuzzy Path Planning Problem.). Let us
consider two fuzzy positions (
˜
i
p
,
˜
t
p
) and a spatial de-
scription given by SpaceOnology (Φ, R, I). A path so-
lution Pth between
˜
i
p
,
˜
t
p
is a continuous sequence of
positions/regions that allows the robot to move from
the initial state to the goal state while avoiding obsta-
cles.
4.3.1 Path Planning
Our main contributions to the path planning focus
on using space hierarchy, topological spatial relations
and spatial fuzzy information.
Let us consider that the initial position i
p
is ac-
curate
5
and the target position
˜
t
p
is fuzzy. The path
planning operation is detailed in the following.
Generation of Crossing Network Graph. A
Crossing Network Graph Γ
G
is a directed graph.
Nodes are organized hierarchically. Edges represent
hierarchical relation between nodes. A node in this
graph represents a Crossing Network or a region.
Definition 6 (Crossing Network Γ). A graph Γ =
(V ,E), where; V = (v
1
, . . . , v
n
) is a set of vertices, each
v
i
is a crossing network and E = (e
1
, . . . , e
n
) is a set of
5
To simplify the explanation, the initial position is crisp.
This work may well be applied in the context of precise
positions.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
78
edges, each e
i
defines an adjacency relation, a gate-
way and a congestion.
Each element of Crossing Network Graph is re-
lated to the mission. This graph defines all possible
paths between ip and
˜
t p.
Example 5. In example 3, the team is in office O
B1
11
and the target is in floor E
B6
2
. These offices are not in
the same hierarchical level. In addition, these regions
(O
B1
11
and E
B6
2
) are not adjacent. Thus, finding a path
between these two regions exploits the space hierar-
chy and adjacency links defined in SpaceOntology.
Level 1
Level 2
Level 3
O
B1
11
H
B1
11
C
B1
21
H
B1
31
H
B3
21
C
B3
21
C
B3
12
C
B6
41
C
B6
42
H
B6
21
C
B6
11
C
B6
21
d
11
c
B1
12
c
B1
13
C6
C1
d
21
c
B3
21
C3
C3
d
41
c
B6
12
d21
c
B6
42
E
B1
1
E
B1
2
E
B1
3
E
B3
2
E
B3
1
E
B6
1
E
B6
4
E
B6
2
c
B1
12
c
B1
13
C1
c
B3
21
C3
C3
c
B6
12
c
B6
42
C6
B1
B3
B6
C1
C3
C6
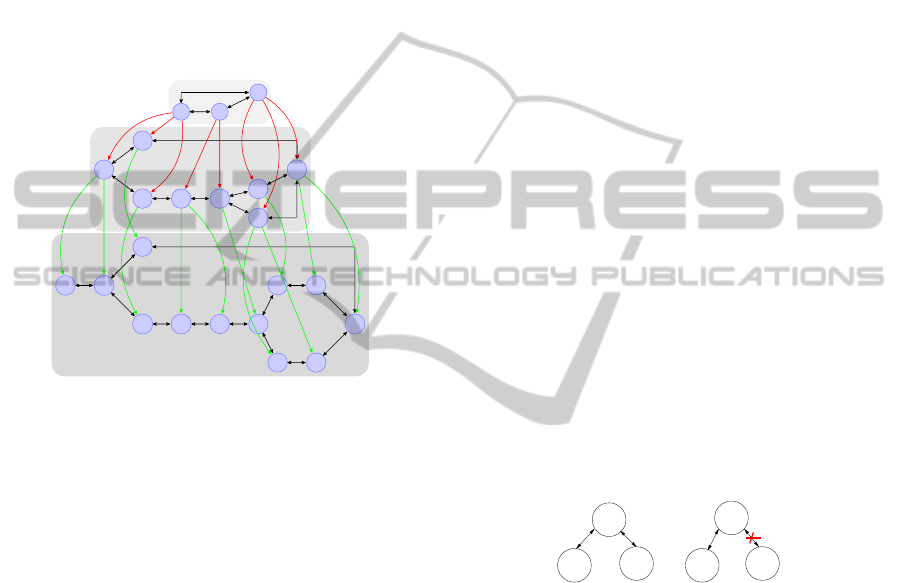
Figure 15: Crossing Network Graph.
First, we consider the most abstract regions for
O
B1
11
and E
B6
2
in the same level, there are B1 and B6.
Then, we look for the adjacency links between B1
and B6. We assume that each region is adjacent to
its neighbors with gates. To extract gates between
regions, we query the ontology. So, we generate all
possible paths between buildings B1 and B6 by con-
sidering B2 ,B3, B4 and B5. However, the passing
through the buildings B2, B4 and B5 is not neces-
sary (Fig. 11). For B2 and B5 they are not included
in the mission; they are a deadlocks regions (one gate
to exit/entrance). For B4, it is not included in the mis-
sion. Also, this region is connected to a deadlock re-
gion B5. So, B4 is also a deadlock region. By combin-
ing all these concepts we generate a directed graph:
Crossing Network Graph (Fig. 15). Nodes are orga-
nized hierarchically. Edges represent hierarchical re-
lation between nodes. A node in this graph represents
a Crossing Network (a graph given the adjacency rela-
tions between regions in the same hierarchical level).
Each node of one level l is developed until reaching
the target hierarchical level. We assume that N
l
is a
subset of regions in the level l. E
l
is a set of edges.
Edges represent spatial adjacency relations between
two nodes giving gateways. For each n ∈ N
l
, n must
satisfy the selection criteria.
Path Computing. We search a path between two
positions i
p
(accurate position) and
˜
t
p
(fuzzy position)
in the Crossing Network Graph, based on two crite-
ria measures (Mouaddib, 2004): (1) minimize the Eu-
clidean distance between i
p
and
˜
t
p
and (2) facilitate
access to a region, to ensure fast and simple actions.
We combine these concepts in order to improve the
path solution quality. These criteria, allow the robot
to execute its actions in an easy and quick way (the
choice of paths that are short in terms of distance)
and to maintain the speed of navigation. We define
a measure: Θ(p
1
, p
2
) = (d(p
1
, p
2
), c(p
1
, p
2
)), where
d(p
1
, p
2
) is the euclidean distance between p
1
et p
2
and c(p
1
, p
2
) measures the congestion in the region
between p
1
and p
2
. Pathfinding in crossing network
graph consists of path search in crossing network for
each hierarchical level. A path solution is a sequence
of paths pth
0
, . . . , pth
k
, where pth
i
contains nodes of
the i-th level and that are a specialization of nodes on
pth
i−1
(i.e the path solution in level 1 is B1−C6 −B6,
the pathfinding in level 2 will not consider the sub
nodes of the node B3 (Fig. 15). In each level, we
use multi-criteria Dijkstra’s algorithm with a single
source Z
i
(i
p
). It returns the shortest path between the
source node and the target one Z
i
(
˜
t
p
) (i is the abstract
level). The shortest path is the path minimizing the
measure Θ
i
= (d, c)
i
, where d is the Euclidean dis-
tance and c is a congestion measure. In order to min-
imize Θ
i
, we compute it as described in (Mouaddib,
2004): Θ
i
=
∑
crit∈{d,c}
Regret(crit). The concept is
to minimize the regret (Fig. 16).
E1
E2
E3
E1
E2 E3
c1(3,5)
c2(0,9)
c1(3,5)
c2(0,9)
(0,5)*
Figure 16: Regret Based Path Selection.
We compute θ
∗
, where this measure is θ
∗
=
(0, 5)
∗
= [Min(3, 0), Min(5, 9)]. Then, for each edge
e, we compute the distance between θ
∗
and θ
e
:
Min(Dist) =
Dist(θ
c
B6
12
, θ
∗
) = Dist((3, 5), (0, 5)) = 3
Dist(θ
c
B6
42
, θ
∗
) = Dist((0, 9), (0, 5)) = 4
Finally, we select the edge allowing us the mini-
mum distance with θ
∗
: edge c
B6
12
(Fig. 16).
We are not interested in the global network in level
i. Indeed, we consider that the nodes and edges be-
longing to the path solution of level i − 1. We can
generate the path for each node in the next level and
exploit the hierarchical aspect of space which reduces
the search time. Indeed, only nodes of the at level i
are extended in level i + 1 and thus some edges in the
graph are not explored.
SPATIAL KNOWLEDGE IN PLANNING LANGUAGE
79

5 EXPERIMENTS
We present some experimental results to solve plan-
ning described with Spatial-PDDL.
5.1 Experimental Results
The computation time to solve a spatial planning
problem described in Space-PDDL depends on com-
puting time of answering to queries.
Table 2: Computation Time of Plan Solution Generation
Solving the problem in Example 3 (seconds). The path
computation time is less then one second.
Queries Solving
problemQueries number Answer to query
[2-8] < 1 < 1
[9-13] [1-2.2] [1 - 3.08]
[14-20] [3.01-4.8] [4.01 - 7]
[21-30] [5.05-10.09] [8.07 -
15.01]
Table 2 shows that the computation time depends
on the number of requests and the response time.
The latter depends on the rules number defined in
SpaceOntology. This computing time is very reason-
able even if we have a large number of requests. In-
deed, in Table 2, for a query number between 21 and
30, solving the problem is done in 15.01 seconds.
6 CONCLUSIONS
Our main contribution was the extension of PDDL to
spatial knowledge: Spatial-PDDL. To do this, we uses
SpaceOntology that considers several spatial knowl-
edge aspects; the space hierarchy, spatial relations
(numeric, topological and fuzzy). This permits to
consider not only numeric spatial information in pre-
conditions but also topological and fuzzy information.
Moreover, spatial reasoning (the inference mecha-
nisms) provided by this ontology permits a complex
reasoning. SpaceOntology in the planning, is not used
for verification or control, but as information needed
for planning.
Future work will concern the improvement of spa-
tial interaction between human and robots. In other
words, we aim to formalize communication between
them, especially in the case where the set of fuzzy
rules are not sufficient to find a solution.
REFERENCES
Baader, F. (2003). The description logic handbook: theory,
implementation, and applications. Cambridge Univ
Pr.
Balbiani, P., Condotta, J.-F., and del Cerro, L. F. (1999). A
new tractable subclass of the rectangle algebra. IJCAI.
Belouaer, L., Bouzid, M., and Mouaddib, A. (2010). On-
tology based spatial planning for human-robot inter-
action. TIME.
Bouguerra, A., Karlsson, L., and Saffiotti, A. (2008). Mon-
itoring the execution of robot plans using semantic
knowledge. Robotics and Autonomous Systems.
Dasiopoulou, S., Mezaris, V., Kompatsiaris, I., Papastathis,
V., and Strintzis, M. (2005). Knowledge-assisted se-
mantic video object detection. IEEE Transactions on
Circuits and Systems for Video Technology.
Dominey, P., Boucher, J., and Inui, T. (2004). Building
an adaptive spoken language interface for perceptually
grounded human–robot interaction. In IEEE-RAS/RSJ
international conference on humanoid robots.
Dou, D. (2008). The Formal Syntax and Semantics of Web-
PDDL.
Fox, M. and Long, D. (2003). PDDL2. 1: An extension
to PDDL for expressing temporal planning domains.
JAIR.
Ghallab, M., Howe, A., Knoblock, C., McDermott, D.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL the planning domain definition lan-
guage. AIPS.
Guitton, J. (2010). Architecture hybride pour la planifica-
tion d’actions et de dplacemen.
Hudelot, C., Atif, J., and Bloch, I. (2003). Fuzzy spatial
relation ontology for image interpretation. Fuzzy Sets
and Systems.
Laborie, S., Euzenat, J., and Layaıda, N. (2006). A spatial
algebra for multimedia document adaptation. SMAT.
Mouaddib, A.-I. (2004). Multi-objective decision-theoretic
path planning. In ICRA.
Prosser, P. (1995). Mac-cbj: maintaining arc consistency
with con ict-directed backjumping. Research report,
177.
Schockaert, S. (2008). Reasoning about fuzzy temporal and
spatial information from the web. PhD thesis, Ghent
University.
Sirin, E., Parsia, B., Grau, B., Kalyanpur, A., and Katz, Y.
(2007). Pellet: A practical owl-dl reasoner. Web Se-
mantics: science, services and agents on the World
Wide Web, 5(2):51–53.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
80
