
SUITABILITY OF A GENETIC ALGORITHM FOR ROAD
TRAFFIC NETWORK DIVISION
Tomas Potuzak
Department of Computer Science and Engineering, University of West Bohemia, Univerzitni 8, Plzen, Czech Republic
Keywords: Traffic Network Division, Genetic Algorithm, Multi-objective Optimization.
Abstract: In this paper, the suitability of a genetic algorithm as a part of a method for division of road traffic network
is discussed. The division of traffic network is necessary during the adaptation of the road traffic simulation
for distributed computing environment. This environment enables to perform detailed simulation of large
traffic networks (e.g. entire cities and larger) in a reasonable time. Genetic algorithms are considered, since
they are often employed in both graph partitioning and multi-objective optimization problems. These
problems are closely associated with the problem of road traffic network division.
1 INTRODUCTION
The computer simulation of road traffic is an
important tool for analysis and control of road traffic
networks. However, a detailed simulation of large
areas (e.g. entire cities) can still require unsuitable
amount of computational time. Therefore, many
simulators have been adapted for distributed
computing environment (Nagel and Rickert, 2001,
Gonnet, 2001). In this environment, the combined
power of multiple interconnected computers (nodes)
is utilized to speed up the simulation. The traffic
network is divided into sub-networks, which are
then simulated by simulation processes running on
particular nodes of the distributed computer.
The division of the network can affect the
performance of the resulting distributed simulation.
There are two main issues, which should be
considered during the simulation – the similar load
of the simulation processes and minimal inter-
process communication among them. There are
many methods for division of traffic network, which
consider one of the issues, both, or neither.
In this paper, the suitability of a genetic
algorithm (GA) as a part of a method for division of
road traffic network is discussed. Genetic algorithms
are considered, since they are often employed in
both graph partitioning (Menouar, 2010) and multi-
objective optimization (Farshbaf and Feizi-Darakh-
shi, 2009) problems, which are closely associated
with the problem of road traffic network division.
2 TRAFFIC NETWORK
DIVISION
As it was said, there are two issues, which should be
considered during the traffic network division. Both
issues are described in following subsections.
2.1 Load-balancing of Sub-networks
The similar load of the simulation processes is
necessary, because all simulation processes are
synchronized. Hence, the maximal speed of the
simulation is determined by the slowest process
(Cetin et al., 2003). So, the distributed simulation
can achieve maximal speed, when the load of all
simulation processes is similar and all processes
require similar time to be performed.
The load of the simulation processes depends
primarily on the number of vehicles moving within
the simulated sub-networks. The reason is that the
movement of the vehicles is the primary and most
computation-consuming activity of the simulation.
If the load-balancing issue is considered during
the traffic network division, the common approach is
to use some feature of the traffic network as a
representative weight for the load of the network.
The network is then divided in a way that the sub-
networks have similar weights, whose sum is equal
to the weight of entire traffic network. The weight
can be for example cumulative length of traffic lanes
(Nagel and Rickert, 2001) or number of vehicles
448
Potuzak T..
SUITABILITY OF A GENETIC ALGORITHM FOR ROAD TRAFFIC NETWORK DIVISION.
DOI: 10.5220/0003657204400443
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2011), pages 440-443
ISBN: 978-989-8425-79-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

moving within the lanes (Gonnet, 2001).
2.2 Low Inter-process Communication
The minimal inter-process communication is neces-
sary, because it is relatively slow in comparison to
other activities in the distributed simulation. The
communication is required for the transfer of
vehicles between the particular neighbouring traffic
sub-networks and also for synchronization.
The number of messages for vehicles transfer is
affected by the number of traffic lanes inter-
connecting the traffic sub-networks. Therefore, it is
convenient to minimize this number during the
traffic network division. Graph partitioning methods
such as orthogonal recursive bisection can be emp-
loyed for this purpose (Nagel and Rickert, 2001).
3 GENETIC ALGORITHMS (GA)
Now, as we discussed traffic network division
issues, we can proceed with genetic algorithms.
3.1 General Concept
Genetic algorithms (GA) are evolutionary algo-
rithms that mimic natural genetic evolution and
selection in nature (Menouar, 2010). Developed by
John Holland at the University of Michigan
(Holland, 1975), they are widely used for solving of
searching and optimization problems in many
domains including multi-objective optimization
(Farshbaf and Feizi-Darakhshi, 2009).
3.2 Basic Phases and Notions
Using a genetic algorithm, it is first necessary to
define representation of a problem solution. Usually,
a solution or an individual is represented by a vector
of binary or integer values. When the representation
is specified, an initial set of individuals is generated.
This set is called initial population (Menouar, 2010).
For all individuals of the set, a fitness function is
calculated. This function represents an assessment of
the individual (Menouar, 2010) depending on pro-
blem domain. It can favour one criterion or be multi-
objective (Farsh-baf and Feizi-Darakhshi, 2009).
A number of individuals with best fitness are
selected. The crossover and mutation are then used
to produce a new population (Farshbaf and Feizi-
Darakhshi, 2009). By crossing, a new offspring is
produced using two parents. The mutation is
represented by random change(s) in the individual’s
representation (Bui and Moon, 1996).
The whole process repeats until certain number
of iterations is reached (Menouar, 2010) or a stop
condition is fulfilled (Bui and Moon, 1996).
4 GA FOR NETWORK DIVISION
Genetic algorithms should be suitable for traffic
network division, since they are convenient for
graph partitioning and multi-objective optimization.
The equal load of the simulation processes and
minimal number of connecting traffic lanes between
them are the two objectives of the network division.
4.1 Problem Formulation
The genetic algorithm can optimize both criterions
using the correct fitness function. Its input is the
traffic network, which shall be divided into required
number of sub-networks. Moreover, for the load-
balancing of the sub-networks, it is necessary to add
information about the vehicles, because the load of
the sub-networks depends primarily on the number
of vehicles moving within them (see Section 2.1).
4.2 Assigning Weights to Traffic Lanes
The information about the vehicles can be added as
the weights of particular traffic lanes. These weights
express the mean number of vehicles moving in the
lanes during the simulation run.
However, the acquisition of this information
from the sequential run of the simulation can be
problematic due to memory and time requirements.
Still, this approach can be found in (Gonnet, 2001).
Another solution is to use a less detailed
simulation, which is fast enough to be performed
sequentially in a suitable time. The fidelity of such
less-detailed simulation is lower than the fidelity of
the simulation, but sufficient to be used for the
network division (Potuzak, 2011).
4.3 Dividing Network using GA
So, the genetic algorithm has the weighted traffic
network as its input. Its output is the assignment of
the crossroads to the particular sub-networks. This
information is sufficient for marking of traffic lanes,
which shall be divided to form the required number
of sub-networks (the ultimate goal of the traffic
network division). It is only necessary to mark
traffic lanes connecting crossroads assigned to
different sub-networks (Potuzak, 2011).
SUITABILITY OF A GENETIC ALGORITHM FOR ROAD TRAFFIC NETWORK DIVISION
449
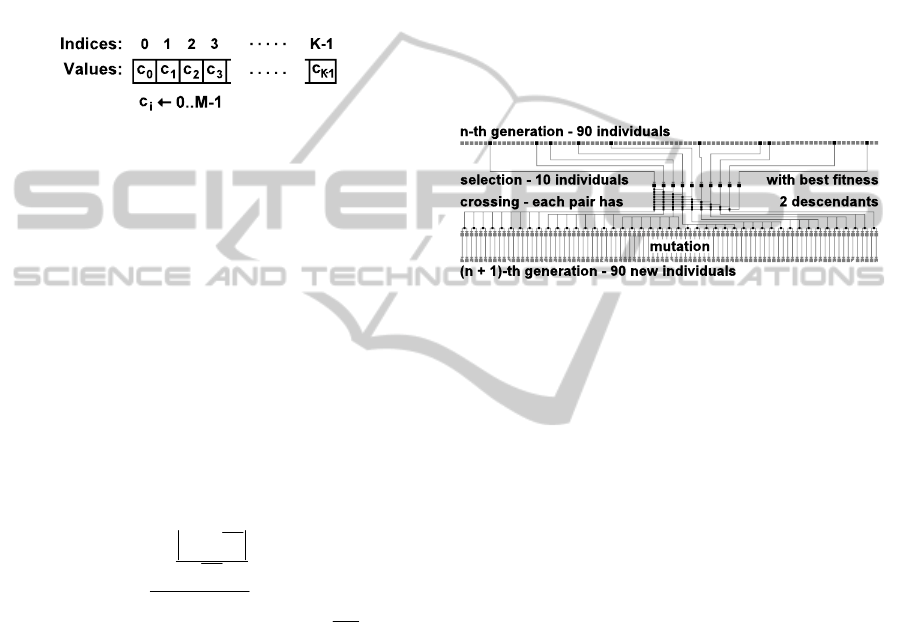
4.4 Representation of Individual
The first step in design of a genetic algorithm is to
determine the representation of an individual. In this
case, an individual can be represented by a vector of
integers with the size corresponding to the total
number of crossroads K. Then, each vector index
represents a crossroad and its value represents the
sub-network, to which the crossroad is assigned (see
Fig. 1). So, the maximal value of an integer cor-
responds to the number of required sub-networks M.
Figure 1: Representation of an individual.
In the initial population of 90 individuals, the
crossroads are randomly assigned to the sub-
networks. Using the fitness function, crossover, and
mutation, this assignment changes towards a
solution, where the sub-networks are load-balanced
and the number of divided lanes is minimal.
4.5 Fitness Function
Considering the statements from previous sections,
the fitness function consists of two parts – the
equability representing the equal load of the sub-
networks and the compactness representing the
minimal number of divided traffic lanes. The
equability of an individual can be calculated as:
1
1
M
Si S
S
i
ww
w
E
M
=
−
=−
∑
,
(1)
where E is the equability of an individual,
S
w is the
mean total weight of one traffic sub-network, w
Si
is
the total weight of the ith sub-network, and M is the
number of sub-networks.
The compactness C is very important for minimi-
zation of the number of divided traffic lanes. It can
be calculated as the ratio of the number of undivided
traffic lanes and the total number of traffic lanes.
Due to different requirements for the traffic
network division results in different situations, it is
possible to set the equability ratio in the fitness
function. Hence, it can be calculated as:
()
CrErF
EE
⋅
−
+⋅= 1 ,
(2)
where, F is the fitness function of an individual, E is
its the equability, C is its compactness and r
E
is the
ratio of the equability in the fitness function. The r
E
can be set from 0.0 to 1.0. For a standard situation,
the r
E
has the value from 0.25 to 0.5.
4.6 Crossover and Mutation
After the initial population of 90 individuals is
generated (see Section 4.4), the fitness value is
calculated for each individual. Based on the fitness
value, 10 individuals are selected to be “parents” of
the next generation. The size of population and the
number of selected individuals have been selected
based on preliminary tests. The next generation is
created using the crossover and mutation operators
on the selected individuals (see Fig. 2).
Figure 2: Creation of new generation of individuals.
Using all combinations of 10 selected indivi-
duals, a new generation of 90 individuals is created
and the entire process repeats until preset number of
generations is reached.
5 TESTS AND RESULTS
The suitability of the genetic algorithm for traffic
network division was tested. Two sets of tests were
performed as described in following sections.
5.1 Fitness Dependencies
The first set of tests was focused on the dependen-
cies of the maximal achieved fitness on the size of
the traffic network, the number of sub-networks, and
the number of generations. Three regular square
grids of 64, 256, and 1024 crossroads divided into 2,
4, and 8 sub-networks were used for testing. The
number of generations ranged from 100 to 100000.
The r
E
ratio was set to 0.5.
The results (averaged from ten attempts) are
depicted in Fig. 3. The maximal achieved fitness
increases with increasing number of generations.
This is an expectable behaviour, since more genera-
tions offer more time for convergence to the best
solution. Another observation is that the maximal
achieved fitness decreases with increasing number
KDIR 2011 - International Conference on Knowledge Discovery and Information Retrieval
450

of crossroads and sub-networks. This is caused in
both cases by higher complexity of the individuals
due to increasing length or increasing number of
possible values in the individuals, respectively.
Figure 3: Dependencies of the maximal achieved fitness.
5.2 Time Performance of the GA
The second set of tests was focused on the time
performance of the genetic algorithm, which
depends on both the size of the traffic network and
the number of generations. It was tested using a
regular square grid of 64, 256, and 1024 crossroads,
respectively. For each traffic network, the genetic
algorithm was performed using 100, 1000, 10000,
and 100000 generations. The network was always
divided into two sub-networks. Both dependencies
can be observed in Fig. 4.
Figure 4: Dependency of the GA time performance.
Both time dependencies on the network size and
generations count are linear (note logarithmic scale
of the x- and y-axis and linear scale of the z-axis).
6 CONCLUSIONS
In this paper, we discussed the suitability of a
genetic algorithm for division of the weighted traffic
network. Considering the results of the performed
sets of tests, it can be concluded that the genetic
algorithm is suitable for the traffic network division.
Its computation time is linearly dependent on the
size of traffic network and the number of generation
count. This makes it usable even for large networks.
In our future work, we will focus on further
improvements of the designed genetic algorithm.
ACKNOWLEDGEMENTS
This work is supported by the Ministry of Education,
Youth, and Sport of Czech Republic – University
spec. research – 1311.
REFERENCES
Bui, T. N., Moon, B. R., 1996, Genetic Algorithm and
Graph Partitioning. In: IEEE Transactions on
Computers, vol. 45(7).
Cetin, N., Burri, A., Nagel, K., 2003, A Large-Scale
Agent-Based Traffic Microsimulation Based on Queue
Model. In: Proceedings of 3rd Swiss Transport
Research Conference, Monte Veritas.
Farshbaf, M., Feizi-Darakhshi, M., 2009, Multi-objective
Optimization of Graph Partitioning using Genetic
Algorithms. In: 2009 Third International Conference
on Advanced Engineering Computing and
Applications in Sciences.
Gonnet, P. G., 2001, A Queue-Based Distributed Traffic
Micro-simulation. Technical report.
Holland, J. H., 1975, Adaptation in Natural and Artificial
Systems. University of Michigan Press, Ann Arbor.
Menouar, B., 2010, Genetic Algorithm Encoding
Representations for Graph Partitioning Problems. In:
2010 International Conference on Machine and Web
Intelligence (ICMWI), pp. 288–291.
Nagel, K., Rickert, M., 2011. Parallel Implementation of
the TRANSIMS Micro-Simulation. In: Parallel
Computing, vol. 27(12), pp. 1611–1639.
Potuzak, T., 2011, Comparison of Road Traffic Network
Division Based on Microscopic and Macroscopic
Simulation. In: UKSim 2011 – UKSim 13th
International conference on Computer Modelling and
Simulation, Cambridge, pp. 409–414.
SUITABILITY OF A GENETIC ALGORITHM FOR ROAD TRAFFIC NETWORK DIVISION
451
