
ACQUISITION OF JUMPING BEHAVIOR ON THE ARTIFICIAL
CREATURE UNDER VIRTUAL PHYSICAL ENVIRONMENT
Yuta Umemura, Ikuo Suzuki, Masahito Yamamoto and Masashi Furukawa
Graduate School of Information Science and Technology, Hokkaido University, Sapporo, Japan
Keywords: Artificial life, Physics modelling, Jumping, RCGA, Behavior simple, Behavior composed.
Abstract: Walking and jumping are very effective movement in a debris area. However, it is difficult to jump
successively because it has a lot of difficulties (e.g. controlling the strong power at taking off and
suppressing an impact at landing). This paper proposes how to acquire the successive jumping motion. We
model an artificial creature like a locust under the physical virtual environment and control it by using
Artificial Neural Network (ANN). In order to realize the successive jumping motion, this paper proposes a
concept of “Behavior Simple (BS)” and “Behavior Composed (BC)”. The concept of BC is that a complex
behavior is composed of plural simple behaviors. We consider that the successive jumping is divided into
three BSs, taking off, getting up and returning leg back motion. After three BSs are trained by using the
Real-Coded Genetic Algorithm (RCGA) independently, BC is trained by using RCGA as well. Experiments
verify that the efficient successive jumping can be acquired.
1 INTRODUCTION
A study on jumping motion has been applied to
various fields such as robotics (Fu et al., 2010),
biological analysis (Gronenberg, 1996) and so on.
Jumping is a complex motion because it has a lot
of difficulties (e.g. controlling strong power at
taking off, keeping correct posture and suppressing
an impact at landing) so that most of studies focus
on only a part of jumping motion. Sutton and
Burrows (2008) analyzed the mechanics of taking
off of the locust. (McKinley et al., 1983) and
(Nauwelaerts and Aerts, 2005) analyzed the power
of landing forces. However, it is required to build up
a more practical jumping model and a system
considering some difficulties in jumping.
We create the locust model as jumping model
under the virtual physical environment. It can jump,
walk and act various kinds of movement. This paper
proposes how to acquire the successive jumping
motion that capable of repeating big jumping.
We consider that the successive jumping motion
is divided into three simple behaviors, the kicking
ground, getting up from the overturning situation
and returning leg back motion. A concept of
"Behavior Simple” (BS) and “Behavior Composed”
(BC) (Furukawa et al., 2010) is applied to this idea.
This concept is that a complex behavior is realized
by switching plural simple behaviors. In this paper,
the successive jumping motion is BC and the
kicking ground, getting up and returning leg back
motion are BSs. Optimizing the system of switching
three BSs realizes the successive jumping motion as
BC (Figure 1).
The rest of this paper is constructed as follows.
Section two proposes the locust model and a simple
experiment. Section three proposes three
experiments to get three simple behaviors. Then,
section four proposes one experiment to get the
successive jumping motion. Finally, our work is
summarized in section five as conclusion.
Figure 1: The successive jumping motion is realized by
switching three BSs.
2 THE LOCUST MODEL
2.1 The Locust Model
We create the locust model under the virtual
physical environment by using PhysX. PhysX is a
physics motion engine developed by NVIDIA.
311
Umemura Y., Suzuki I., Yamamoto M. and Furukawa M..
ACQUISITION OF JUMPING BEHAVIOR ON THE ARTIFICIAL CREATURE UNDER VIRTUAL PHYSICAL ENVIRONMENT.
DOI: 10.5220/0003671903110314
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 311-314
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
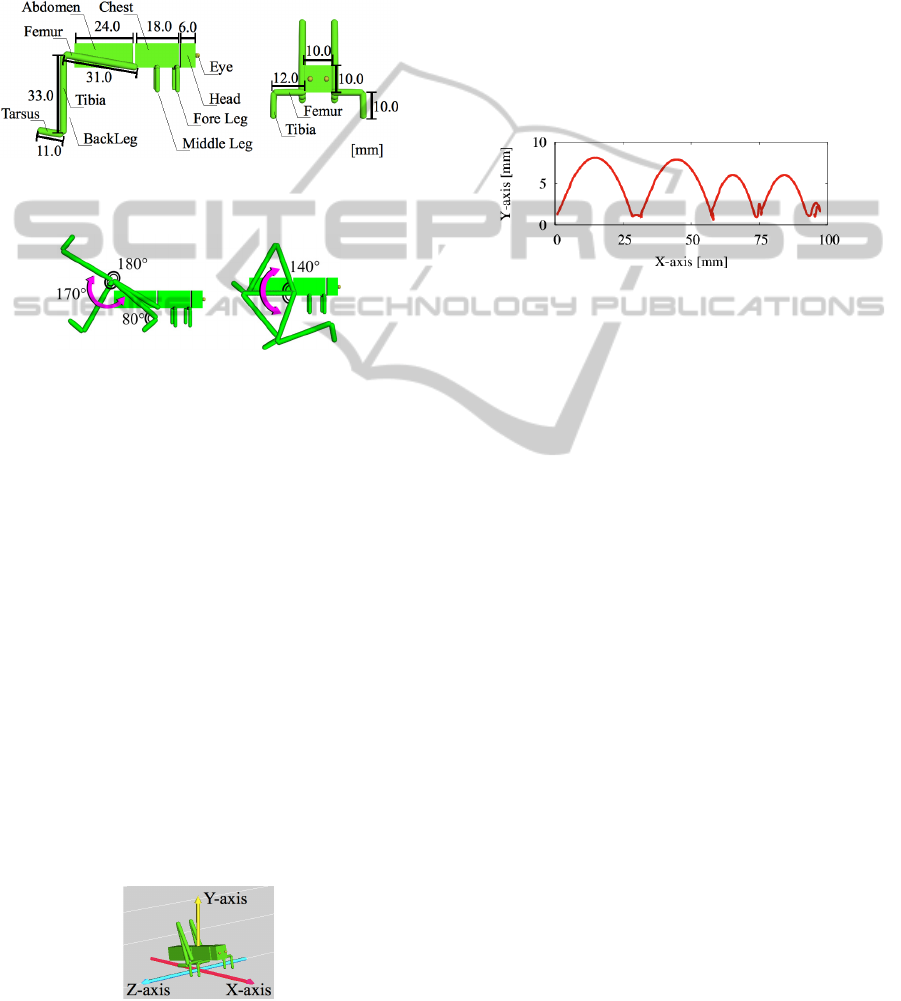
The model consists of four parts, body, fore legs,
middle legs and back legs as shown in Figure 2. The
density of each part is 300 [kg/m
3
] as the locust has.
The actuator is implemented to joints between a
body and a femur and between a femur and a tibia at
each side of back legs. The model is controlled by 4
actuators and the angle range of that is shown in
Figure 3.
Figure 2: The locust model consists of a body, fore legs,
middle legs, and back legs.
Figure 3: Each actuator rotates within specified angles.
2.2 Rule-based Successive Jumping
Avoiding Overturning
One of the ideas to realize successive jumping is
repeating jumping motion with avoiding overturning.
This jumping motion is achieved by repeating the
kicking ground motion and kicking legs back motion.
Rule-based system is acquired by trial and error. In
this system, the time during which the tarsus touches
the ground is regarded as the touch time. We define
the change time as a certain time needed for
recovering the attitude. If the touch time reaches the
change time and the tarsus touches the ground, the
model acts by kicking the ground motion. The touch
time is reset when the tarsus leaves the ground and
until the touch time reaches the change time again,
the model acts by the kicking legs back motion.
Figure 4 shows the initial state of the model. It is
set on the origin of the coordinate system and its
heading is set along the x-axis.
Figure 4: The model turns its head to forward direction of
the x-axis of world axis at the initial state.
Figure 5 shows the trajectory of the successive
jumping motion by using appropriate rules found
empirically with the height of the model along the
vertical axis and a travel distance of the model along
the horizontal axis.
It is noticed that the rule-based successive
jumping is not satisfactory because as jumping is
repeated, the height and distance becomes small
(Figure 5). Actually, the posture of the model
becomes poor step by step because the model does
not have the recovery motion. In addition, once it
overturns, it cannot get up and jump any more. This
paper aims at acquiring the successive jumping
motion with big jumping and generalization.
Figure 5: The successive jumping motion is acquired by
repeating specified motion.
3 THE BEHAVIOR SIMPLE
To realize our purpose, it is not enough to control
the model with simple control system.
Then, Artificial Neural Network (ANN) is
employed to control all actuators. The model
acquires appropriate motion by optimizing synaptic
weights of ANN by Real-Coded Genetic Algorithm
(RCGA). The evaluation function is defined in each
experiment.
In this experiment, the ANN has nine units in the
input layer, 10 units in the hidden layer and four
units in the output layer. The following items
represent nine inputs.
angles at four actuators I
1
~I
4
[0, 2π]
a touch sensor of back legs and the ground I
5
(off:1 or on:-1)
1/(H+1) (H is the height of model) I
6
[0, 1]
the inner product of the local axis (Figure 6) and
the world axis (Figure 4) I
7
~I
9
[-1, 1]
Four outputs, O
1
~O
4
[-10°, 10°] is displacement
angles every 1/120 [s] for each actuator.
In RCGA, we have 50 individuals as a
population. RCGA is terminated when the
generation number becomes 1000. As genetic
operations, elite preserving strategy, crossover and
mutation operations are used.
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
312
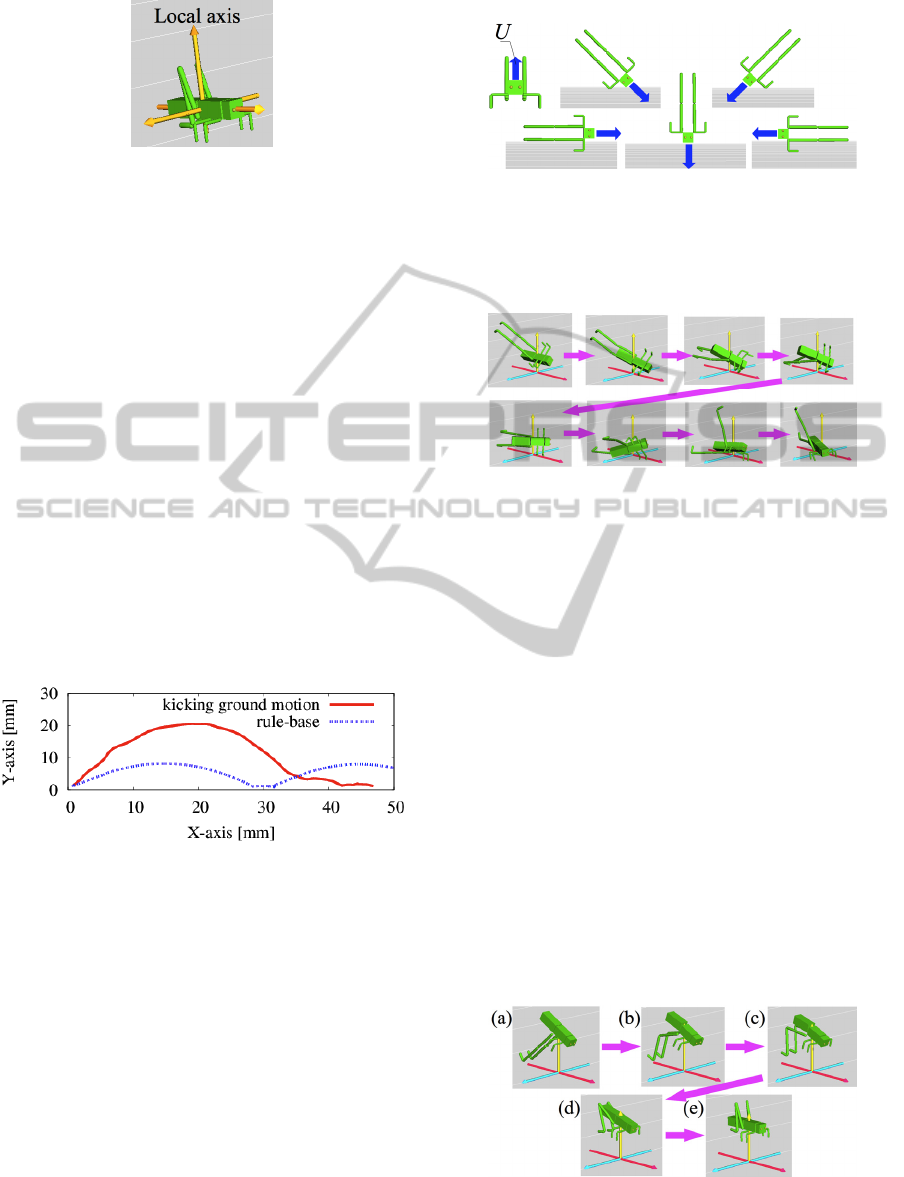
Figure 6: The local axis of the model is defined.
3.1 Acquiring the Kicking Ground
Motion
The model acquires the kicking ground motion as
the taking off motion. In this experiment, the posture
of the model and the landing are not considered. The
initial state and position are shown in Figure 4. We
simulated 300 steps in each generation of RCGA for
evaluating the individual. 1 step is 1/120 [s] on
PhysX.
The fitness function is set as expressed in Eq.(1).
Maximizing E means maximizing a square area of a
rectangle consists of the initial point and the top
point on a single jumping.
t
xyE
max
(1)
The trajectory of acquired motion and rule-based
successive jumping motion is shown in Figure 7.
The height of the acquired motion is about twice as
high as the rule-based successive jumping motion.
Figure 7: The height of the kicking ground motion is about
twice as high as the rule-based successive jumping motion.
3.2 Acquiring the Getting Up Motion
The model acquires the getting up motion as a part
of recovery motion. At first, the vector U (Figure 8)
is defined which is one of the local axes (Figure 5)
and represents an upward direction of the model.
Five initial states are defined as the overturning
states. Those are rotated from one side position to
the opposite side position every 45 degrees (Figure
8). We simulated 1000 steps for each individual in
this experiment.
The fitness function is set as Eq.(2). Maximizing
U
y
leads the model to get up from the initial state as
soon as possible.
Figure 8: The vector U and 5 initial states are defined.
Figure 9 shows the one of the successful getting
up motion and the model gets up from all of initial
states.
Figure 9: The model gets up from plural overturning states.
()
5 1000
1
y
St
EUt
=
=
åå
(2)
The model gets up from not only 5 initial states but
also other initial states. We set 180 additional initial
states which are rotated from one side position to the
opposite side position in every 1 degree. The model
gets up from 65 additional initial states by acquired
motion. It verifies that acquired getting up motion is
effective to recover from overturning.
3.3 Acquiring the Returning Leg Back
Motion
The locust acquires the returning leg back motion as
a part of recovery motion. In experiment acquiring
the getting up motion, it is not evaluated about the
angle of each actuator. When the model gets up, it
may not be the appropriate angle for the next
jumping.
Figure 10: The model gradually bending each joint to the
jumping initial position.
ACQUISITION OF JUMPING BEHAVIOR ON THE ARTIFICIAL CREATURE UNDER VIRTUAL PHYSICAL
ENVIRONMENT
313

The model must learn the angle ready for the
next jumping.
We simulate 1000 steps and the initial position is
set as shown in Figure 10 (a). The fitness function is
set as shown in Eq.(3).
200 4
11
ii
ti
E jq
==
=- -
åå
(3)
Where, φis the initial angle of each actuator andθ
is the angle of each actuator at t step. The model
acquires the motion for bending each actuator to the
goal position (Figure 10 (e)).
4 THE BEHAVIOR COMPOSED
After the locust acquires three BSs, the switching
BSs system is optimized and it leads to acquire
successive jumping motion. A higher ranked ANN is
used as switching system. It consists of nine units in
the input layer, 10 units in the hidden layer and three
units in the output layer. Its nine inputs are the same
as those of BSs’ ANN. Its three outputs [0, 1]
correspond to three BSs’ ANN. One of the BSs’
ANN is selected which corresponding output has the
largest value among those of three.
We set 3000 steps for each individual. A higher
ranked ANN select one of BSs’ ANN in every 120
steps. We define the initial position as shown in
Figure 11 to make it easy to acquire the successive
jumping motion. The fitness function is set as Eq.(4).
Maximizing the accumulated heights of the model
leads to jump successively.
3000
1
t
t
Ey
=
=
å
(4)
Figure 12 shows the trajectory of the acquired
motion and rule-based successive jumping motion.
The lower part indicates the selected BS at that time.
The acquired motion is more than twice as high as
rule-based successive jumping motion at all jumps.
It verifies that the switching BSs system works well
and appropriate BSs’ ANN is selected at that time.
Figure 11: The initial state of acquiring the successive
jumping motion is one of the initial states of the getting up
motion.
Figure 12: Successive jumping acquired by BC and
selected BS.
5 CONCLUSIONS
We create the model under the virtual environment
as jumping model and use ANN as the controller.
Three BSs, the kicking ground, the getting up
and the returning leg back motion are acquired
respectively by RCGA. After that, the model acquire
the successive jumping motion as BC by
compositing three BSs.
More complex behavior which includes jumping,
walking and so on are acquired in a future work.
REFERENCES
X. Fu, F. Li, W. Liu, C. Stefanini and P. Dario. (2010).
Design of a bionic Saltatorial Leg for Jumping Mini
Robot. ICIRA (pp. 477-487).
Masashi Furukawa, Makoto Morinaga, Ryosuke Ooe,
Michiko Watanabe, Ikuo Suzuki, and Masahito
Yamamoto. (2010). Behavior Composed for Artificial
Flying Creature. SCIS & ISIS.
W. Gronenberg. (1996). Fast actions in small animals:
springs and click mechanisms. J Comp Physiol A,
178(6), 727-734
P. A. McKinley, J. L. Smith, and R. J. Gregor. (1983).
Responses of elbow extensors to landing forces during
jump downs in cats. Experimental Brain Research,
49(2), 218-228.
S. Nauwelaerts and P. Aerts. (2006). Take-off and landing
forces in jumping frogs. Journal of experimental
biology, 209(1), 66.
G. P. Sutton and M. Burrows. (2008). The mechanics of
elevation control in locust jumping. J Comp Physiol A,
194(6), 557-563.
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
314
