
SYNTHESIZING PHEROMONE AGENTS FOR SERIALIZATION
IN THE DISTRIBUTED ANT COLONY CLUSTERING
Munehiro Shintani
1
, Shawn Lee
1
, Munehiro Takimoto
1
and Yasushi Kambayashi
2
1
Department of Information Sciences, Tokyo University of Science, Tokyo, Japan
2
Department of Computer and Information Engineering, Nippon Institute of Technology, Miyashiro, Japan
Keywords:
Mobile agent, Ant colony clustering, Intelligent robot control.
Abstract:
This paper presents effective extensions of our previously proposed algorithm for controlling multiple robots.
The robots are connected by communication networks, and the controlling algorithm is based on a specific
Ant Colony Clustering (ACC) algorithm. Unlike traditional ACC, we implemented the ants as actual mobile
software agents that control the mobile robots which are corresponding to objects. The ant agent migrates
among robots to look for an available one. Once the ant agent finds an available robot, the robot physically
moves along the instructions of the ant agent, instead of being conveyed. We also implemented pheromone
as mobile software agents, which attract many robots to some clusters by diffusing themselves through the
migration, so that the pheromone agents enable the robots to be efficiently assembled. In our new approach,
we take advantage of the pheromone agents not only to assemble the robots but also to serialize them. The
serializing property is desirable for particular applications such as gathering carts in the airports. We achieve
the property through migrations of the pheromone agents within a cluster and synthesizing them. We have
built a simulator based on our algorithm, and conducted numerical experiments to demonstrate the feasibility
of our approach.
1 INTRODUCTION
When we pass through terminals of the airport, we
often see carts scattered in the walkway and laborers
manually collecting them one by one. It is a laborious
task and not a fascinating job. It would be much easier
if carts were roughly gathered in any way before the
laborers begin to collect them.
In order to achieve such clustering, we have taken
advantage of the Ant Colony Clustering (ACC) algo-
rithm which is an Ant Colony Optimization (ACO)
specialized for clustering objects. ACO is a swarm
intelligence-based method and a multi-agent sys-
tem that exploits artificial stigmergy for the solu-
tion of combinatorial optimization problems. ACC
is inspired by the collective behaviors of ants, and
Deneubourg formulated an algorithm that simulates
the ant corps gathering and brood sorting behaviors
(Deneubourg et al., 1991). In ACC, artificial ants col-
lect objects that are scattered in a field, imitating the
real ants, so that several clusters are gradually formed.
In traditional ACC, imaginary ants convey imaginary
objects for classifying them based on some similar-
ities, but in our algorithm, we implemented the ants
as actual mobile software agents that control the mo-
bile robots which are corresponding to objects. The
ant agent migrates among robots to look for an avail-
able one. Once the ant agent finds the available robot,
the robot physically moves along the instructions of
the ant agent, instead of being conveyed. The con-
trol manner contributes to suppressing total time cost
and energy consumption of the system. Because both
the time cost and energy consumption of migrations
of ant agents are negligible compared to the physical
movements of mobile robots.
We previously proposed an ACC approach using
mobile software agents. We call it distributed ACC
(Mizutani et al., 2010; Oikawa et al., 2010). In the
approach, some Ant agents, which is mobile soft-
ware agents corresponding to ants, iteratively traverse
robots, which correspond to objects picked up by ants.
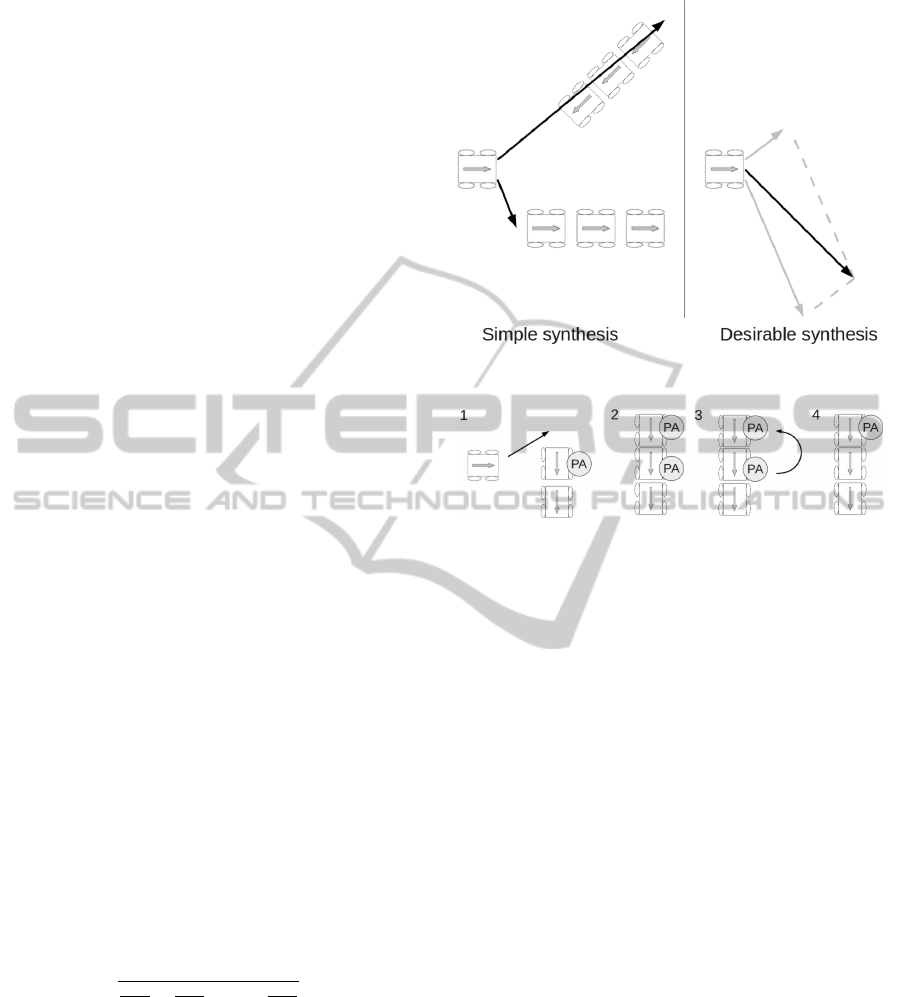
Once the Ant agent migrates to a free robot with no
other task, it randomly drives the robot as shown by
1 of Figure 1. If the robot reaches another robot as
shown by 2 of Figure 1, an Ant agent locks its robot,
and leaves it to look for another free robot. In the
approach, the pheromone is also implemented as a
collection of mobile software agents. We call them
Pheromone agents. Each Pheromone agent is created
by an Ant agent on a robot included in a cluster. Once
it is created on the robot, it duplicates itself and makes
the clone migrate to other robots within the scope to
220
Shintani M., Lee S., Takimoto M. and Kambayashi Y..
SYNTHESIZING PHEROMONE AGENTS FOR SERIALIZATION IN THE DISTRIBUTED ANT COLONY CLUSTERING.
DOI: 10.5220/0003673302200226
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 220-226
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: The outline of the previous algorithm.
disseminate its effect. The Pheromone agent has a
vector datum representing strength and direction of its
attractiveness, which is used for guiding Ant agents as
shown by 3 of Figure 1. Multiple Pheromone agents
reaching the same robot are combined into a single
agent. Their vector data are synthesized into a single
vector datum, and then stored into the single agent.
Although the previous approach yielded favorable
results for its efficiency and energy consumption in
the experiments, it just gathered robots, and did not
consider how to align them as shown by 4 of Figure
1. Consider applying the approach to carts in termi-
nals of the airport as mentioned above. After the carts
have been roughly gathered, the laborers would have
to take them away, for which they would serialize the
carts. Such serialization task would be still laborious
for the human workers even if the carts are roughly
gathered.
Recently, we proposed an approach not only gath-
ering robots but also serializing them (Shintani et al.,
2011). In the approach, a pheromone agent on a robot
in a cluster initially has a vector value indicating the
back of the robot. When several pheromone agents
migrate to the same robot, the Ant agent on the des-
tination robot picks up the one that comes from the
nearest robot, instead of combining them. Then the
Ant agent, while it is guided by the pheromone agent,
drives the robot, on which it resides, to the tail of
the nearest cluster. These extensions for the previ-
ous approach enable each cluster generated by dis-
tributed ACC to be serialized without sacrificing su-
perior properties. They work quite well on a simula-
tor. However, every robot potentially holds the max-
imum number of Pheromone Agents, which can lead
to a fatal problem for robots with limited resources.
In this paper, we propose yet another algorithm to
serialize the robots in an assembled cluster. In this
algorithm, when several pheromone agents migrate
to the same robot, they are combined into a single
agent with a synthesized vector datum in the manner
where the vector value to a closer destination more
strongly affects the new vector value. These new ex-
tensions practically enable each cluster generated by
distributed ACC to be serialized without sacrificing
superior properties.
The structure of the balance of this paper is as fol-
lows. In the second section, we describe the back-
ground. The third section describes basic properties
of Pheromone Agents. The fourth section describes
how the new algorithm performs the quasi optimal
clustering of the mobile robots and serializing them
based on Pheromone Agents. The fifth section de-
scribes the numerical experiments using a simulator
based on our algorithm. Finally, we conclude in the
fifth section and discuss future research directions.
2 BACKGROUND
Kambayashi and Takimoto have proposed a frame-
work for controlling intelligent multiple robots using
higher-order mobile agents (Kambayashi et al., 2009;
Kambayashi and Takimoto, 2005; Takimoto et al.,
2007). The framework helps users to construct intel-
ligent robot control software by migration of mobile
agents. Since the migrating agents are higher-order,
the control software can be hierarchically assembled
while they are running. Dynamically extending con-
trol software by the migration of mobile agents en-
ables them to make base control software relatively
simple, and to add functionalities one by one as they
know the working environment. Thus they do not
have to make the intelligent robot smart from the be-
ginning or make the robot learn by itself. They can
send intelligence later as new agents. Even though
they demonstrate the usefulness of the dynamic exten-
sion of the robot control software by using the higher-
order mobile agents, such higher-order property is not
necessary in our setting. We have employed a sim-
ple, non higher-order mobile agent system for our
framework. They have implemented a team of co-
operative search robots to show the effectiveness of
their framework, and demonstrated that their frame-
work contributes to energy saving of multiple robots
(Takimoto et al., 2007; Nagata et al., 2009). They
have achieved significant saving of energy for search
robot applications.
On the other hand, algorithms that are inspired
by behaviors of social insects such as ants to com-
municate to each other by an indirect communication
called stigmergy are becoming popular (Dorigo et al.,
2006; Dorigo and Gambardella, 1996). Upon ob-
serving real ants’ behaviors, Dorigo et al. found that
ants exchanged information by laying down a trail of
SYNTHESIZING PHEROMONE AGENTS FOR SERIALIZATION IN THE DISTRIBUTED ANT COLONY
CLUSTERING
221

Figure 2: The outline of the serialization algorithm.
a chemical substance (called pheromone) that is fol-
lowed by other ants. They adopted this ant strategy,
known as ant colony optimization (ACO), to solve
various optimization problems such as the traveling
salesman problem (TSP) (Dorigo and Gambardella,
1996). Deneubourg has originally formulated the
biology inspired behavioral algorithm that simulates
the ant corps gathering and brood sorting behaviors
(Deneubourg et al., 1991). Wang and Zhang proposed
an ant inspired approach along this line of research
that sorts objects with multiple robots (Wang and
Zhang, 2004). Lumer has improved Deneubourg’s
model and proposed a new simulation model that is
called Ant Colony Clustering (Lumer and Faiesta,
1994). His method could cluster similar objects into
a few groups.
3 BASIC PROPERTIES OF A
PHEROMONE AGENT
In a new algorithm for serializing robots, an Ant agent
and a robot respectively corresponds to an ant and an
object of ACC. The Ant agent traverse robots through
repeating migrations to find a free robot with no task,
as it does in the previous approach (Mizutani et al.,
2010; Oikawa et al., 2010). Once the Ant agent
finds a free robot A, it behaves along the following
steps. Here AA denotes Ant agent, and PA denotes
Pheromone agent:
1. If there is no PA on robot A, an AA makes the
robot move randomly as shown by 1 of Figure 2.
2. If robot A approaches another robot B during the
random movement, robot A locks itself next to
Figure 3: Calculating the vector value of PA migrating from
a locked robot.
robot B. They compose an initial cluster, as shown
by 2 of Figure 2.
3. If a PA migrates to robot A, the PA guides the
AA following its vector information indicating the
back of the robot C on which the PA was origi-
nally created as shown by 3 of Figure 2.
4. Once robot A reaches the tail of a cluster, the AA
make it turn to the head of the cluster as shown by
4 of Figure 2.
5. Robot A is locked there as a member of the cluster
as shown by 5 of Figure 2.
As soon as a robot is locked as a member of a
cluster, a new PA is created by AA on it and then the
PA migrates to other robots to attract more robots to
the cluster.
3.1 Diffusion
The vector datum of PA represents a vector that points
from the current robot to the destination. Here the
destination is the robot on which PA was created, i.e.
the cluster which PA was created. Therefore the vec-
tor points to the destination and its length represents
the distance to the destination.
The PA has initial vector value indicating the back
of the tail of a cluster, and it is expected to hold the
initial destination to guide AA to the cluster. How-
ever, each time the PA migrates to another robot to
make it diffuse, the vector value becomes pointing to
a location getting out of the initial point. In order to
make the current destination corresponds to the initial
one, the vector value has to be adjusted based on the
direction and the distance of each migration. This ad-
justment can be achieved by the Equation 1. Assume
here that PA migrates from a robot to another one.
Current vector value V
new
can be calculated based on
vector value V
PA
on the source robot of the migration
and vector value V
m
indicating the source from the
destination of the migration as follows:
V
new
= V
PA
+V
m
(1)
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
222
The calculation is repeated every time the agent is mi-
grated to another robot.
Figure 3 shows relations of vector values in the
process where PA migrates from locked robot A to
robot C through B. The initial PA which is denoted as
PA1 has vector1 indicating the tail of the cluster it be-
longs. If PA1 migrate to robot B to diffuse, which is
denoted as PA2 after the migration, PA2 has the vec-
tor value vector3. As shown by Equation 1, it can be
calculated through vector1 + vector2, where vector2
is the vector value indicating the source of the mi-
gration. If PA2 with vector3 migrates to robot C fur-
ther, which is denoted as PA3 after the migration, PA3
has the vector value vector5, which is obtained from
vector3 +vector4 using vector4 indicating the source
of the second migration as well as the first migration.
3.2 Synthesis
Let us consider a case where a PA migrates to another
robot, another PA has already existed on the robot. In
this case, it is profitable for these PAs to be combined
into a single agent, because such a combination sim-
plifies operations to PAs, and contributes to efficient
use of CPU and memory resources. To achieve the
combination, the vector data of the PAs need to be
also synthesized into one vector datum. Notice here
that simple synthesizing of the vector values may not
lead to desirable result. Considering energy consump-
tion and efficiency of convergence of ACC, it is de-
sirable for an AA to be guided to the nearest cluster.
However the vector value that points to far distance
is dominant in the simple synthesized vector value as
shown by Figure 4.
We adopt harmonic mean in our synthesizing vec-
tor values. Harmonic mean has the property that it
is closer to the minimal value of all values, that is,
the harmonic mean of vector values is closer to the
vector value with the nearest destination. This is
what we desire. Thus, the vector value which results
from combining several PAs with vector value V
PA
i
(i = 1, 2, ..., n) is calculated as follows:
V
new
=
n
1
V
PA
1
+
1
V
PA
2
+ ... +
1
V
PA
n
(2)
4 PHEROMONE BASED
SERIALIZATION
We describe details of serializing a cluster based on
PA in this section. The serialization process consists
of two behaviors of PA; one is moving to the tail of
a cluster and the other is guiding AA along its vector
information.
Figure 4: Synthesizing of the vector values.
Figure 5: The property of moving behind.
4.1 Moving to the Tail
As shown by the operations to a vector datum of a PA,
whenever a PA migrates to outside of a cluster, the
PA has to always migrate from the tail of the cluster.
Otherwise, a PA may guide AA to the middle point
of a serialized cluster, generating some branches in
the cluster. We make PAs move to the tail of a clus-
ter as soon as they are created as shown by Figure 5.
The movement is composed of several migrations to
a robot behind a current robot. Notice that, in the pro-
cess of the movement, when a PA migrates to a robot
where another PA has already existed, a different op-
eration is required. In this case, the PA is just killed
instead of being combined. Because the PA on the
tail robot only has a vector value indicating the back
of it, thus the combination is unnecessary. Thus, it is
guaranteed that any clusters have only one PA at their
tails.
4.2 Guiding Ant Agents
When an AA migrates to a robot with no PA, the AA
drives the robot randomly to look for other robots.
Once an AA migrates to a robot with a PA or a PA mi-
grates to a robot with an AA, the AA drives the robot
along guidance of the PA. We call such a driving man-
ner Pheromone Walk. Figure 6 shows the process of
the Pheromone Walk. Each step is as follows:
SYNTHESIZING PHEROMONE AGENTS FOR SERIALIZATION IN THE DISTRIBUTED ANT COLONY
CLUSTERING
223
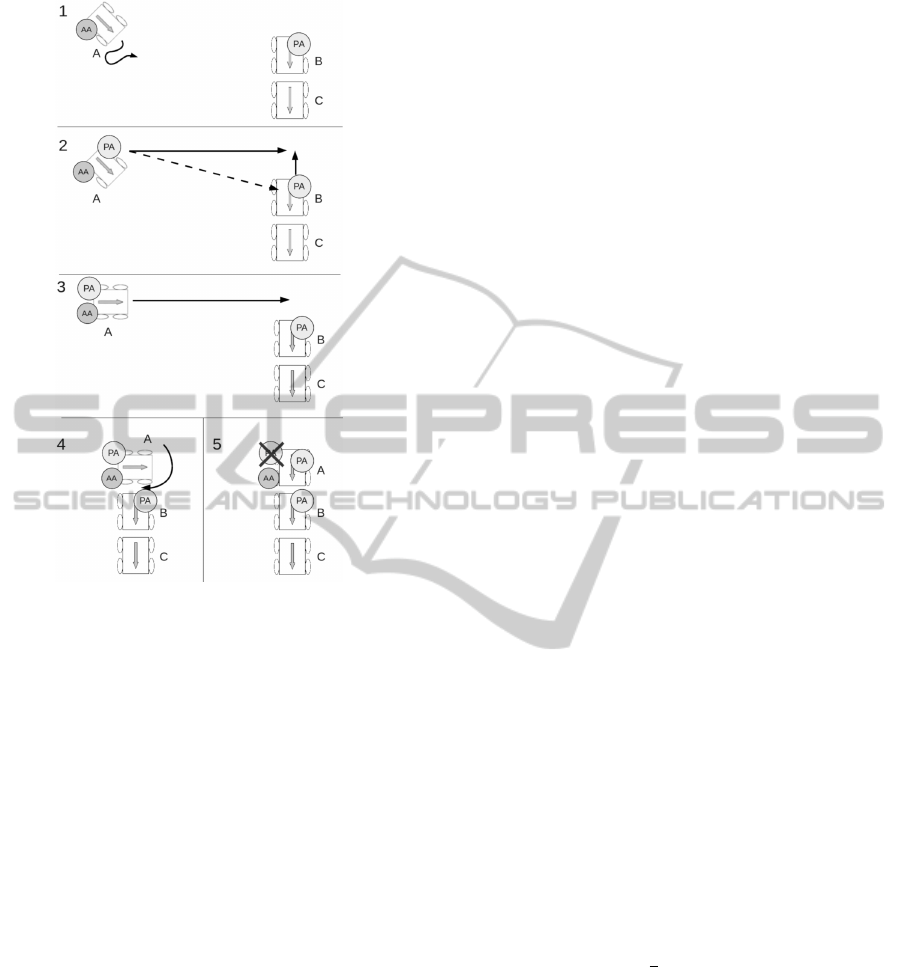
Figure 6: The process for moving to the tail of a cluster.
1. The AA on the robot A drives its robot randomly
and the robot happens to approach a cluster.
2. The PA on the robot B in the cluster migrates to
the robot A. The PA adjusts its vector datum be-
cause of keeping the destination.
3. The PA guides the AA on the same robot and the
AA drives the robot to the destination. The robot
A is not locked until it reaches the destination des-
ignated by the PA even if it approaches another
robot.
4. The robot A reaches the destination. The AA
turns the robot A to the direction of the head of
the cluster.
5. The AA locks the robot A, kills the previous PA,
and creates a new PA.
The condition for avoiding locking during the
Pheromone Walk in step 3 is needed for serialization
without any branch.
The robot A joins to the cluster through these
steps. After that, the AA migrates to some robots
around robot A to find another free robot.
5 EXPERIMENTAL RESULTS
In order to demonstrate the effectiveness of our sys-
tem in a realistic environment, we have implemented
a simulator for serializing robots and conducted ex-
periments on it. On the simulator, moving and rotat-
ing speed of robots, and time lags required in agent
migration and object recognition are based on real
values in the previous experiments using PIONEER
3-DX with ERSP (Mizutani et al., 2010; Oikawa
et al., 2010; Nagata et al., 2009). In the experiments,
we set the following conditions:
1. Robots are scattered in a 500 × 500 square field in
the simulator.
2. Their initial locations and angles are randomly de-
cided without overlapping.
3. Each robot is represented as a square on the grid
field.
In the first set of experiments, we have visualized
the results of the non-serializing approach and the
new approach, where two hundreds robots were scat-
tered in the field, and the fifty robots of them had AA.
Figure 7 and 8 show these arrangements respectively.
A gray square on the grid denotes one robot, and a
circle with the robot at its center shows a scope of its
PA. As shown in the figures, new approach has suc-
cessfully serialized robots while the non-serializing
approach has just formed various shaped clusters.
Next, in order to quantitatively discuss these ar-
rangements, we have measured the total length of
clusters and the angle variances of the clusters, where
the length of a cluster is the length of a diameter of
the minimal circle surrounding the cluster and the an-
gle variance of a cluster is the average of angles in the
cluster. As shown by Figure 9 and as expected, the
total length of the diameters for the new approach is
twice as long as previous one. We can observe that
the arrangement for the new approach is more line-
like than the previous one. The average of angles for
previous approach is about 1.5 radian as shown in Fig-
ure 10. That is about
π
2
. It means that each robot
of a cluster uniformly faces different direction. On
the other hand, the average of angles for the new ap-
proach is much closer to zero than the previous one.
As a result, most robots in a cluster are facing to the
same direction.
The second set of experiments, in order to check
whether the some good properties of the previous ap-
proach are preserved or not, we have conducted sev-
eral experiments with the different numbers of robots
and AAs, and compared their results. As shown in the
Figure 11, in the previous approach, the average size
of a cluster seem to be about 5 and 6 robots, regard-
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
224

Figure 7: The result screen of the previous algorithm.
Figure 8: The result screen of the new algorithm.
Figure 9: The total length
of clusters.
Figure 10: The angle vari-
ance in a cluster.
less the number of AAs and the robots in the field. On
the other hand, in the new approach, the average size
of a cluster has been gradually increasing with the in-
crease of the number of all the robots. Thus, we can
observe that the new approach tends to generate larger
clusters. This is because of the property of the new
approach that PA makes a robot ignore other clusters
except the destination cluster. Considering applying
our approach to the arrangement of carts in the air-
Figure 11: The size of cluster.
Figure 12: The average time taken till convergence.
Figure 13: The total length of traces.
port terminal, it is favorable property that our new ap-
proach creates moderately large (long) clusters as the
experiments show.
Next, as shown in the Figure 12, in the new ap-
proach, we can observe that the time period till con-
vergence for 50 AAs is equal to the time period for
30 AAs though it is less than the time period for 10
AAs, as well as the previous approach. In addition to
that, as shown in the Figure 13, the less the number of
AAs is, the shorter the total length of traces of each
robot is. Since the shorter trace means less energy
consumption, these results demonstrate that the new
approach also has the beneficial features in which the
energy consumption can be decreased on some levels
without sacrificing efficiency. These results show that
the new approach inherits the good properties from
the previous approach.
SYNTHESIZING PHEROMONE AGENTS FOR SERIALIZATION IN THE DISTRIBUTED ANT COLONY
CLUSTERING
225

6 CONCLUSIONS
We proposed a serialization algorithm for mobile
robots using mobile agents with the distributed ACC.
We showed that the algorithm can achieve the seri-
alization of clustered robots, and the algorithm also
inherits the good features of the previous algorithm in
experiments on a simulation system.
On the other hand, we can observe that some lined
clusters bent because of avoiding jutting out of the
field. We are improving the current algorithm to make
clusters slowly bent along the edge of the field or
other clusters, while preventing the formed clusters
being too large.
REFERENCES
Deneubourg, J., Goss, S., Franks, N. R., Sendova-Franks,
A. B., Detrain, C., and Chreien, L. (1991). The dy-
namics of collective sorting: Robot-like ant and ant-
like robot. In Proceedings of the First Conference
on Simulation of Adaptive Behavior: From Animals
to Animats, pages 356–363. MIT Press.
Dorigo, M., Birattari, M., and T. St
¨
utzle (2006). Ant colony
optimization–artificial ants as a computational intel-
ligence technique. IEEE Computational Intelligence
Magazine, 1(4):28–39.
Dorigo, M. and Gambardella, L. M. (1996). Ant colony sys-
tem: a cooperative learning approach to the traveling
salesman. IEEE Transaction on Evolutionary Compu-
tation, 1(1):53–66.
Kambayashi, Y. and Takimoto, M. (2005). Higher-order
mobile agents for controlling intelligent robots. Inter-
national Journal of Intelligent Information Technolo-
gies, 1(2):28–42.
Kambayashi, Y., Ugajin, M., Sato, O., Tsujimura, Y., Ya-
machi, H., Takimoto, M., and Yamamoto, H. (2009).
Integrating ant colony clustering to a multi-robot sys-
tem using mobile agents. Industrial Engineering and
Management Systems, 8(3):181–193.
Lumer, E. D. and Faiesta, B. (1994). Diversity and adap-
tation in populations of clustering ants, from animals
to animats 3. In Proceedings of the 3rd International
Conference on the Simulation of Adaptive Behavior,
pages 501–508. MIT Press.
Mizutani, M., Takimoto, M., and Kambayashi, Y. (2010).
Ant colony clustering using mobile agents as ants and
pheromone. In Proceedings of the Second Interna-
tional Conference on Applications of Intelligent Sys-
tems, pages 435–444. Lecture Notes in Computer Sci-
ence 5990, Springer-Verlag.
Nagata, T., Takimoto, M., and Kambayashi, Y. (2009). Sup-
pressing the total costs of executing tasks using mo-
bile agents. In Proceedings of the 42nd Hawaii Inter-
national Conference on System Sciences. IEEE Com-
puter Society CD-ROM.
Oikawa, R., Mizutani, M., Takimoto, M., and Kambayashi,
Y. (2010). Distributed ant colony clustering using
mobile agents and its effects. In Proceedings of
the 14th KES International Conference on Agent and
Multi-Agent Systems, pages 198–208. Lecture Notes
in Computer Science 6276, Springer-Verlag.
Shintani, M., Lee, S., Takimoto, M., and Kambayashi, Y.
(2011). A serialization algorithm for mobile robots
using mobile agents with distributed ant colony clus-
tering. In Proceedings of the 15th International Con-
ference on Knowledge-Based and Intelligent Informa-
tion and Engineering Systems, to appear.
Takimoto, M., Mizuno, M., Kurio, M., and Kambayashi, Y.
(2007). Saving energy consumption of multi-robots
using higher-order mobile agents. In Proceedings of
the first KES International Symposium on Agent and
Multi-Agent Systems, pages 549–558. Lecture Notes
in Artificial Intelligence 4496, Springer-Verlag.
Wang, T. and Zhang, H. (2004). Collective sorting with
multi-robot. In Proceedings of the First IEEE In-
ternational Conference on Robotics and Biomimetics,
pages 716–720.
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
226
