
SPIKING HIERARCHICAL NEURAL NETWORK FOR CORNER
DETECTION
Dermot Kerr
1
, Martin McGinnity
1
, Sonya Coleman
1
, Qingxiang Wu
1
and Marine Clogenson
2
1
Intelligent Systems Research Centre, University of Ulster, Magee, Derry, BT48 7JL, U.K.
2
CPE Lyon, Domaine Scientifique de la Doua, BP 82077, 69616, Villeurbanne, France
Keywords: Spiking neural network, Corner detection.
Abstract: To enable fast reliable feature matching or tracking in scenes, features need to be discrete and meaningful,
and hence corner detection is often used for this purpose. We present a new approach to corner detection
inspired by the structure and behaviour of the human visual system, which uses spiking neural networks.
Standard digital images are processed and converted to spikes in a manner similar to the processing that is
performed in the retina. The spiking neural network performs edge and corner detection using receptive
fields that are able to detect edges and corners of various orientations. The locations where neurons emit a
spike indicate the positions of detected features. Results are presented using synthetic and real images.
1 INTRODUCTION
Previous research has illustrated that edges,
contours and corners are very important for visual
perception (Shapley and Tolhurst, 1973). Many
derivative-based feature detection operators have
been proposed in the past 30 years, in particular
many detectors have been proposed to detect edge
junctions and corners. Moravec (1977) developed a
corner detector that shifted a small square window
in vertical, horizontal, and diagonal directions.
Harris and Stephens (1988) expanded the Moravec
operator, removing the limitation of discrete
window shifts, to develop a combined corner and
edge detector. The operator response determines
whether the detected feature is a corner, edge, or a
flat region. Smith and Brady’s SUSAN corner
detector (Smith and Brady, 1997) is based on
brightness comparisons over neighbourhoods and
the detector can distinguish both corner and edge
pixels. Shen and Wang (2001) have expanded a
local edge detector so that corners may also be
detected.
However, when comparisons are drawn
between the performance of such artificial vision
feature detectors and the processing capabilities of
the human visual system (HVS) it becomes
apparent that current approaches suffer serious
weaknesses. Recently researchers have started to
examine the possibility of using biologically
inspired image processing techniques. In the HVS a
visual scene is processed starting in the retina where
light intensity is converted into nerve signals within
the photoreceptors. These signals are then pre-
processed and propagated through the various layers
within the retina with varying delays and lateral
inhibition onto the retinal ganglion cells. The majority
of the resulting spike train output from the retinal
ganglion cells travels along the optic nerve for further
processing in the lateral geniculate nucleus (LGN),
and other areas of the brain. Biological research has
shown that the brain deals with information
processing by using a complicated network of neurons
(Hodgkin and Huxley, 1952). The process of
simulating biological information processing in
engineering is termed neuro-engineering (O’Connor,
Huber and Svoboda, 2008) and such techniques are
typically used for artificial intelligent systems.
Spiking neural networks (SNNs) are a new class of
artificial neural network that mimic biological
information processing in the brain more accurately
than traditional neural networks. However there are
very few attempts to use SNNs to model aspects of the
human visual system. In (Van Rullen and Thorpe,
2002) scene categorisation is performed and this work
is then expanded in (Masquelier and Thorpe, 2010) to
perform object recognition. In (Escobar, Masson,
Vieville and Kornprobst, 2009) a SNN is used to
model two areas of the brain concerned with motion,
with the aim of action recognition. A SNN model is
230
Kerr D., McGinnity M., Coleman S., Wu Q. and Clogenson M..
SPIKING HIERARCHICAL NEURAL NETWORK FOR CORNER DETECTION.
DOI: 10.5220/0003682402300235
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2011), pages 230-235
ISBN: 978-989-8425-84-3
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
proposed in (Meftah, Lezoray and Benyettou,
2010) that performs segmentation and edge
detection. In (Chevallier et al., 2006) a distributed
SNN is proposed for extracting saliencies in an
image and in (Hugues et al., 2002) contours are
detected in images through the synchronisation of
integrate and fire neurons. SNN approaches have
also recently been applied for the purpose of image
segmentation, in (Wu et al., 2007a) which has
proven to be fast and efficient. However, these
approaches focus on edge or contour detection but
to a lesser extent, corner or interest point detection.
In (Wu et al., 2007b) a SNN was proposed that
detected right angle corners only.
In this paper we present a SNN approach to
corner detection. Our approach is based on a
biologically inspired hierarchical structured SNN
that is capable of detecting various features (edges
and corners). The network uses difference of
Gaussian filters, replicating the retinal ganglion
cells in the retina, for converting images to spikes.
Receptive fields are formed using a hierarchical
structure, with inputs from two types of retinal
ganglion cells that are capable of detecting edges
and corners. The network detects corners at angles
of 45 and 90 degrees.
In Section 2 we present the neuron model used
in the simulations and in Section 3 we present our
spiking neural network structure. Experiments and
results are presented in Section 4 with discussion
and further work presented in Section 5.
2 SPIKING NEURON MODEL
Biological neurons use short and sudden increases
in voltage (commonly known as action potentials,
spikes or pulses) to send information. The first
scientific model of a spiking neuron, proposed by
Hodgkin and Huxley (1952), is based on
experimental recordings from the giant squid axon
using a voltage clamp method. The complexity in
simulating the model is very high due to the
number of differential equations and the large
number of parameters. Thus, most computer
simulations choose to use a simplified neuron
model such as the integrate-and-fire model (I&F).
The I&F model models the state of the neuron by
its membrane potential, which receives excitatory
or inhibitory signals from synaptic inputs from
other neurons. Each input is weighted by its
associated synaptic strength. The leaky I&F model
produces a more biologically realistic neuron
model adding a “leak” term to the membrane
potential, reflecting the diffusion of ions that occurs
through the membrane when some equilibrium is not
reached in the cell. For implementation purposes, the
leaky I&F model has been selected to model the
network neurons in this paper. A full review of the
biological behaviour of single neurons can be found in
(Gerstner and Kistler, 2002) and a comparison of
different neuron models can be found in (Izhikevich,
2004).
3 NETWORK STRUCTURE
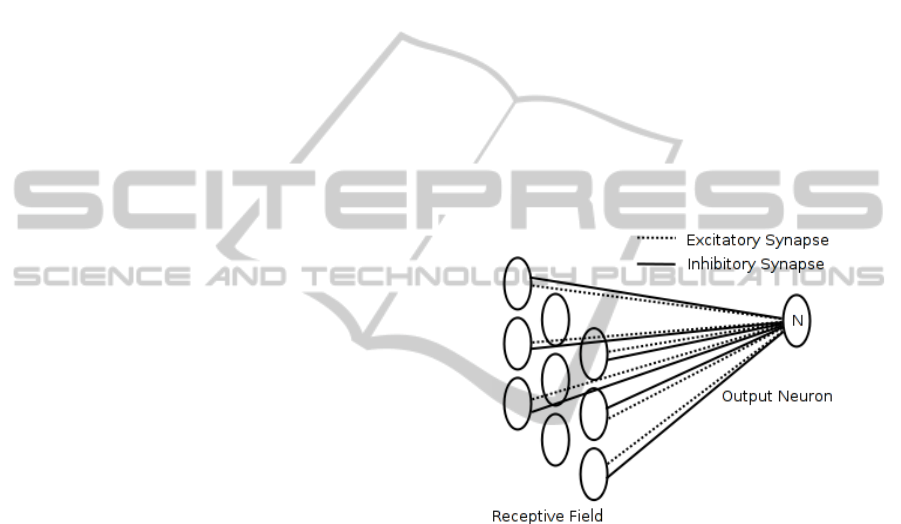
In a biological system a receptive field is where a
spiking neuron integrates the spikes from a group of
afferent neurons as illustrated in Figure 1 where
neuron N has a receptive field with a 9 neuron array.
Each neuron in the receptive field connects to neuron
N through both excitatory and inhibitory synapses.
Figure 1: Receptive field of a spiking neuron.
We construct a spiking neural network using
receptive fields with the leaky I&F neuron model
(outlined in Section 2). Within the network structure
proposed we have four processing layers
corresponding to the receptor layer, the edge detection
layer, the corner detection layer, and the output layer.
We define our spiking neural network structure as
illustrated in Figure 2. The first layer in the network
represents the retinal ganglion cells found in the
retina. Here the input image mimics the On-Centre
Off-Surround and Off-Centre On-Surround ganglion
cells found in the retina by convolution with
difference of Gaussian (DoG) filters. This layer
produces two images that are converted into spike
trains in the time domain. In summary the conversion
from input image to spike trains involves converting
the DoG responses to spike trains where high DoG
responses correspond to spike trains with short delays
and low DoG responses correspond to spike trains
SPIKING HIERARCHICAL NEURAL NETWORK FOR CORNER DETECTION
231
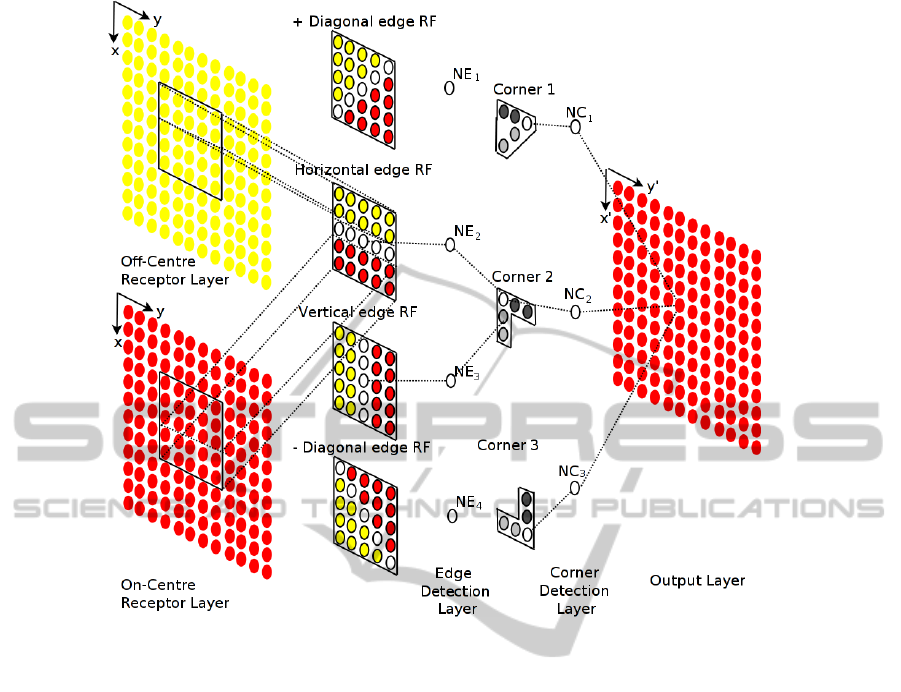
Figure 2: Spiking Neural Network Structure.
with long delays. The highest output from the DoG
filtered images are areas where the image intensity
changes rapidly, corresponding to the most rapidly
firing neuron. Zero or negative DoG responses are
areas where the image intensity remains constant
corresponding to the slowest firing neurons
Due to the nature of the On-Centre Off-
Surround and Off-Centre On-Surround images any
neurons that fire slow in one image fire rapidly in
the other, and vice-versa as the images are inverses
of each other. Thus, areas of interest in the images,
such as a rapid change in intensity can be detected
with a change in the firing rate of neurons in a
particular region. To detect this change in firing
rate between images we construct receptive fields
of various orientations that receive input on either
side from the On-Centre and Off-Centre images. If
the receptive field has all the neurons firing rapidly
i.e. both sides of the receptive field, this
corresponds to an area of the image with rapidly
changing intensity, such as an edge.
In this work we define the edge detection layer
with four types of neurons corresponding to four
different receptive fields respectively. There are
four parallel arrays of neurons in the edge
detection layer each of the same dimension as the
Receptor layer with only one neuron (labeled
NE
x
) in
each array illustrated in Figure 2 for simplicity. Each
of these layers performs the processing for a different
edge direction and is connected to the receptor layer
by differing weight matrices. The receptive field
receives input on either side from both the On- Centre
and Off-Centre receptor level inputs. The arrangement
of the inputs determines the edge orientation that may
be detected. In the experiments presented here we
have four types of edge receptive fields corresponding
to horizontal, vertical, and both diagonal directions.
The synaptic weights for all the edge detection
receptive fields are identical and are chosen
heuristically.
The corner detection layer is composed of eight
types of neurons and performs in a similar manner to
the edge detection layer. The inputs to the corner
detection neurons are the outputs from the edge
detection neurons at different orientations. The
arrangement of the inputs determines the type of
corner that may be detected. Each corner detection
neuron has a receptive field formed by different edge
detection neurons. For example, in Figure 2 we
illustrate that the corner detection neuron
NC
2
forms a
NCTA 2011 - International Conference on Neural Computation Theory and Applications
232
receptive field with edge detection neurons
NE
2
and NE
3
corresponding to horizontal and vertical
edges respectively. Thus actual connectivity of the
synapses within the receptive field defines the type
of corner the neuron can detect. In Figure 2 we
have illustrated three types of corner detection
receptive fields for visual clarity. The synaptic
weights for all the corner detection receptive fields
are identical and are chosen heuristically.
The output layer integrates all the responses
from the corner detection layer and produces a
firing map. The corner neuron firing map indicates
those neurons that have reached each individual
neuron’s firing threshold and thus produced a
spike. Hence, a corner point is detected at a
location where a neuron in the corner detection
layer has fired at least one spike. For visual clarity
detected points are superimposed over the original
image in the presented results. The network model
was implemented with the Brian simulator
(Goodman and Brette, 2009) using a standard
leaky I&F model with parameters
that are
consistent with biological neurons (Gerstner and
Kistler, 2002).
4 EXPERIMENTS AND
RESULTS
In order to test the performance of our proposed
spiking neural network we construct a synthetic
image with two rectangular shapes at different
orientations. The image intensities used to
construct the step edges in the synthetic image are
100, 129, and 158 (where the possible range of
intensities is [0-255]) and the image size is 45
45
pixels. In the case of the orientated rectangle shape
the intensities are obtained through bilinear
interpolation using the same step edge intensities,
the synthetic image is presented in Figure 3.
Figure 3: Example synthetic input image.
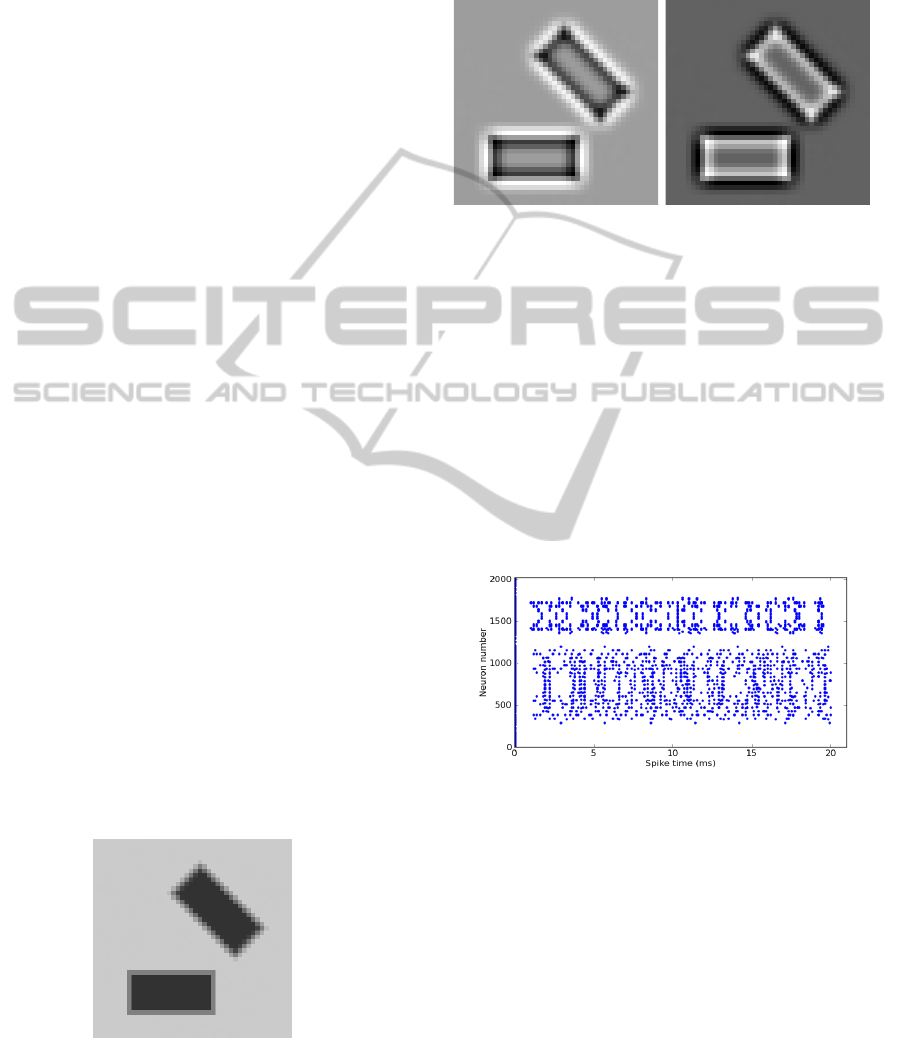
As described in Section 3 we then convolve the
input image with DoG filters, mimicking the On-
Centre Off-Surround and Off-Centre On-Surround
ganglion cells found in the retina and the outputs after
convolution with the two DoG filters are illustrated in
Figure 4.
(a) On-Centre
Off-Surround
(b) Off-Centre
On-Surround
Figure 4: Example retinal ganglion cell filtered image.
The retinal ganglion cell images are converted into
spike trains. Figure 5 illustrates an example raster plot
for the spike activities of the image in Figure 4(a). In
Figure 5, individual neurons are represented on the y-
axis and the x-axis represents the spike activities of
each neuron over the simulation time. This spike
raster plot illustrates that in areas of the retinal
ganglion cell image with negative or zero values no
spikes are produced and in areas of the retinal
ganglion cell image with the strongest responses the
corresponding neuron fires rapidly.
Figure 5: Example spike trains computed from On-Centre
Off-Surround ganglion cell image.
The On-Centre and Off-Centre image spike trains
are presented to the hierarchical network and
processed by the edge detection layer using the
receptive fields. This layer then provides input to the
corner detection layer. To illustrate the performance
of the edge detection layer we show an example
output raster plot for the horizontal edge in Figure 6(a)
and the combined outputs from the edge detection
layer translated to image positions highlighted over
the original input image in Figure 6(b). The spikes
output from the edge detection layer are then input
into the corner detection layer where the various types
of receptive fields process them in order to perform
SPIKING HIERARCHICAL NEURAL NETWORK FOR CORNER DETECTION
233

(a) Firing neurons for horizontal edge (b) Edge neurons firing locations
Figure 6: Example neurons firing in edge detection layer.
(a) Firing neurons for corner type 1 (b) Corner neurons firing locations
Figure 7: Example neurons firing in corner detection layer.
(a) Input image (b) SNN Corner detector (c) Harris Corner detector
Figure 8: Example output from simple real image.
corner detection. The outputs from the corner
detection layer are then integrated in the output layer
where neurons are tuned to fire upon receiving a
spike from any neuron in the corner detection layer.
In Figure 7(a) we illustrate the output raster plot
for all neurons connected to one particular type of
corner detection receptive field (in this case a 90°
corner orientated between 90°-180°). There is only
one spike firing in the raster plot indicating that
there is only one particular type of corner present
corresponding to that type of neuron in the image.
The outputs from all the corner neurons that have
fired in the corner detection layer are illustrated in
Figure 7(b) where the firing neurons have been
transformed into image locations and marked where
the centre of the square is the firing neuron location.
We have also applied the network to a simple real
image to examine its performance in comparison to
the standard corner detection algorithm of Harris and
Stephens (1988), as illustrated in Figure 8. This
visual comparison illustrates the SNN provides
similar results to the Harris corner detector (with a
threshold equal to 120) and in some cases the
corners are more accurately located using the SNN
approach than the Harris corner detector.
NCTA 2011 - International Conference on Neural Computation Theory and Applications
234

5 DISCUSSION AND FUTURE
WORK
The spiking neural network presented in this paper is
constructed using a hierarchical structure that is
composed of spiking neurons with various receptive
fields. The input image is converted to retinal
ganglion cell output spike trains by convolving with
DoG filters. The spike trains are presented to the
network and the various receptive fields process the
image, performing edge detection and corner
detection. The spiking neuron models provide
powerful functionality for integration of inputs and
generation of spikes. Synapses are able to perform
different complicated computations. This paper
demonstrates how a spiking neural network can
detect edge and corners in an image. The
performance illustrates that the proposed detector is
currently only capable of detecting simple edges at
specific orientations and similarly only particular
corner types. However, the current results appear
promising when compared with the standard Harris
approach to corner detection. Future work will
involve the incorporation of biologically plausible
unsupervised learning algorithms (STDP) to set the
synaptic weights, automatic development of
receptive fields to deal with different edge and
corner types.
ACKNOWLEDGEMENTS
This work was supported by the Centre of
Excellence in Intelligent Systems project, funded by
InvestNI and the Integrated Development Fund.
REFERENCES
Chevallier, S., Tarroux, P. and Paugam-Moisy, H., (2006).
Saliency extraction with a distributed spiking neural
network. ESANN'06.
Escobar M. J., Masson G. S., Vieville T. and Kornprobst
P., (2009). Action Recognition Using a Bio-Inspired
Feedforward Spiking Network. International Journal
of Computer Vision. 82, 3, 284-301.
Gerstner, W. and Kistler, W., (2002). Spiking Neuron
Models: Single Neurons, Populations, Plasticity,
Cambridge University Press, 2002.
Goodman D. F. and Brette R., (2009). The Brian
simulator, Front. Neurosci. 3, 2, 192-197.
Harris, C. and Stephens, M., (1988). A Combined Corner
and Edge Detector. Proceedings 4th Alvey Vision
Conf. 147-151.
Hodgkin, A. and Huxley, A. (1952). A quantitative
description of membrane current and its application to
conduction and excitation in nerve. Journal of
Physiology, London, 117, 500-544.
Hugues, E., Guilleux, F. and Rochel, O., (2002). Contour
Detection by synchronization of Integrate and Fire
Neurons. BMVC, 2002.
Izhikevich, E.M., Which model to use for cortical spiking
neurons? IEEE Trans. on Neural Networks. 15, 5.
Masquelier, T. and Thorpe, S. J. (2010). Learning to
recognize objects using waves of spikes and Spike
Timing-Dependent Plasticity. The 2010 International
Joint Conference on Neural Networks (IJCNN). 1-8.
Meftah, B., Lezoray, O. and Benyettou, A. (2010).
Segmentation and Edge Detection based on Spiking
Neural Network Model. Neural Processing Letters,
32, 2, 2010.
Moravec, H. P., (1977) Towards Automatic Visual
Obstacle Avoidance. Proceedings 5th Int. Joint
Conference. Artificial Intelligence. Cambridge, MA,
USA. 584.
O’Connor, D. H., Huber, D., and Svoboda, K. (2008).
Reverse engineering the mouse brain. Nature 461,
923-929.
Shapley, R. M. and Tolhurst, D. J., (1973). Edge detectors
in human vision. Journal of Physiology. 229, 1, 165-
183.
Shen, F. and Wang, H., (2001). A Local Edge Detector
Used for Finding Corners. Proceedings 3rd Int. Conf.
Inf, Comm. And Signal Processing. Singapore.
Smith, S. M. and Brady, J. M., (1997). SUSAN – A New
Approach to Low Level Image Processing. IJCV. 23,
1, 45-78.
van Rullen R. and Thorpe S., (2002). Surfing a spike wave
down the ventral stream. Vision Research. 42, 2593-
2615.
Wu, Q. X., McGinnity, T. M., Maguire, L. P., Glackin B.
and Belatreche, A., (2007a). Information Processing
Functionality of Spiking Neurons for Image Feature
Extraction. 7th Int. Workshop on Information
Processing in Cells & Tissue. Jesus College, Oxford,
UK.
Wu, Q. X., McGinnity, T. M., Maguire, L. P., Belatreche,
A., and Glackin, B., (2007b). Edge Detection Based
on Spiking Neural Network Model. Proc of ICIC.
SPIKING HIERARCHICAL NEURAL NETWORK FOR CORNER DETECTION
235
