
A FUZZY LOGIC MODEL FOR NETWORK SIGNAL CONTROL
AND TRANSIT PREEMPTION
Yaser E. Hawas
Civil and Environmental Engineering Department, UAE University, Al Ain, U.A.E.
Keywords: Signal control, Fuzzy logic modelling and control, Simulation, Transit pre-emption.
Abstract: The majority of the fuzzy controllers for traffic signal control in the literature operate using raw data from
single point detectors installed on the intersection’s various approaches. The input variables to the fuzzy
logic controllers are usually simple estimates of traffic measures such as flow, speed or occupancy,
estimated from such single detector readings. A room for improvement is sought herein by developing a
fuzzy logic model (FLM) that could be integrated with smarter “processing” tools to estimate several traffic
measures from multiple detectors on each approach. The estimates obtained from this processing tool are
integrated as input knowledge into the FLM. The devised FLM structure is presented. A mesoscopic
simulation model is devised to test the effectiveness of the FLM. The premise of the presented FLM is that
it accounts for the network congestion downstream the individual traffic signals. This makes the FLM
applicable for network rather than isolated type of signal control. Furthermore, the FLM accounts for transit
pre-emption control as warranted. Several simulation-based experiments are presented including the basic
FLM for isolated signal control, the FLM control enabling downstream congestion effect, and the one
enabling transit pre-emption. The results are presented and discussed in details.
1 INTRODUCTION
Fuzzy logic models and artificial intelligence
methodologies were reported to have promising
capabilities to deal with highway traffic network
problems. Some fuzzy logic applications for traffic
modeling and control were developed using some
intuitive approaches based on capturing the
knowledge of the operators or experts (Sugeno and
Nishida, 1985). More applications were developed
using heuristic design rules or on-line adaptation of
initially intuited rules (Zimmermann, 1996). Several
FLM applications for traffic signal control were
discussed in (Niittymaki and Pursula, 2000). A
multi-level FLM coupled with a reasoning approach
was used in (Niittymaki and Turunen, 2003).
Multiple upstream detectors were used to measure
flows and estimate queues. The traffic flows are
used to estimate the approaches’ traffic intensities,
which are then used to decide on extension or
termination of the current phase green using a two-
stage FLM (Triba et al., 1999).
Fuzzy logic has been occasionally criticized
because the membership functions and the
knowledge base (rules) are conventionally set
intuitively using reasoning arguments of huge data
sets or trail-and-errors. As such, optimal
performance is not guaranteed. To overcome these
deficiencies, the neuro-fuzzy logic approach
(integrated fuzzy logic and neural nets) had emerged
in literature as a promising approach in controlling
complex systems by utilizing the training
capabilities of the neural nets (Hawas, 2007).
Among the initial attempts for neuro-fuzzy logic
applications for traffic signal control is the work
reported in (Henry et al., 1998). The use of neural
nets in learning [through simulation data] the best
detector location as it relates to the signal delay is
discussed in (Bingham, 2001). A set of simplified
simulation experiments were developed to assess the
performance and to illustrate the training of the
FLM.
Simulation is recognized in literature as the tool to
assess the effectiveness of the devised fuzzy logic
models (Chou and Teng, 2003); (Kosonen, 2003);
(Murat and Gedizlioglu, 2005). Simulation was also
adopted together with multi-agent control scheme,
and fuzzy inference (Kosonen, 2003). Each signal
operates individually as an agent, negotiating with
other agents (signals) about the control strategy
451
E. Hawas Y..
A FUZZY LOGIC MODEL FOR NETWORK SIGNAL CONTROL AND TRANSIT PREEMPTION.
DOI: 10.5220/0003685704510458
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (FCTA-2011), pages 451-458
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

(Kosonen, 2003).
The majority of the fuzzy logic controllers in the
literature depend on raw counting detector data, with
very few attempts (Palacharla and Nelson, 1999);
(Mirchandani and Head, 2001); (Wen, 2007) made
to transfer such data into other traffic measures that
could be used to enhance the control intuition and/or
effectiveness. Fuzzy logic and neural nets were
utilized to estimate the link travel time (Palacharla
and Nelson, 1999). A real-time traffic control system
that predicts traffic measures [such as travel time,
queue spillbacks, and turning probabilities to enable
pro-active control] was introduced in (Mirchandani
and Head, 2001). A framework for dynamic traffic
light control coupled with a simulation model [to
analyze the inter-arrival and inter-departure times to
estimate the essential traffic measures needed for the
control logic] was introduced in (Wen, 2007).
In summary, the limitations of the fuzzy systems
for traffic control include the little consideration to
the effect of the traffic stream composition (small
cars, vans, trucks, buses, etc). Literally there is no
consideration for transit vehicles preemptions.
Among the limitations also is that the traffic
congestion in the downstream of the signal
approaches is not accounted for, and as such green
time might not be effectively allocated to a phase
(based on its upstream detector counts) in situations
where the downstream approaches are exhibiting
extreme congestion or blockage. Furthermore, little
was reported on how the actual or the predicted
queue on the approaches can be accurately
estimated, as it cannot be detected by the typical
single loop detector arrangement.
The majority of the fuzzy logic controllers in the
literature are reactive to the raw detector data
(counts) on the signal approaches. For instance,
almost all the reported controllers depend on point
detector “vehicular” counts with no considerations
for vehicular types. Treating all types of vehicles
equally might not result in fair treatment of all
phases, if the traffic stream composition is varying
among the phases. An approach with high
percentage of heavy vehicles or busses should not be
treated as equal as another approach with similar
flows of small cars only. A better treatment is to
account for the passenger car units flow instead of
the vehicular flow. Alternatively, one could also
devise a controller to preempt the public busses.
Furthermore, the raw vehicular counts do not
explicitly capture the congestion status along the
approaches. Incorporating additional variables such
as concentration, actual approach speed, or queue
length would result in a better logic. As a rule of
thumb, a single point detector on each approach is
not enough to capture the congestion status of the
approach. Furthermore, a logic that depends on one
traffic measure (such as flow) could employ
erroneous decisions.
A more effective controller is sought herein by
integrating the envisaged FLM to a processing tool
of the raw data. This tool is intended to process the
raw data into knowledge to develop smarter logic.
The knowledge processing tool would utilize the
detector counts to estimate some input variables to
the FLM. In this paper, a fuzzy signal controller that
incorporates “knowledge” in the decision making
process and not merely raw detector data is
developed. “Knowledge” term refers to any traffic
measures estimated from raw data.
2 OVERVIEW OF FUZZY LOGIC
SYSTEM
The developed FLM system requires the installation
of two detectors for each lane (one downstream, and
one upstream). This is the minimum requirement
needed to accurately capture the congestion status of
the approach. Additional detectors might be installed
to increase the accuracy of estimating some traffic
measures such as queue length, but this may be
argued to be cost ineffective. For simplicity in
presentation, we assume that the FLM is operating a
four-phase signal; each approach is assigned a
separate phase.
The logic depends on the (passenger car units)
PCU estimates on each approach. This takes into
account the traffic stream composition and the
turning movement percentages (captured by the
detectors). The field detectors’ readings are
processed further by some traffic status estimator
tool, that transfer such field measures into complex
traffic measures (or “knowledge”), which are then
used as inputs to the FLM. The knowledge here
refers to the estimated traffic measures beyond the
field detector counts. The introduced FLM utilizes
the estimates of the following traffic measures for
each phase’s approach:
• Traffic counts on approach in PCU
• Queue length (count) on approach in PCU
• Truck percentage
• Average approach speed
• Downstream link blockage index; an index (1-
100) to indicate the congestion status of the
downstream link (100% indicating a fully blocked
downstream link)
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
452

• A transit indicator status (ON/OFF) or (1/0)
when a transit vehicle is expected to reach/not to
reach the queue to be served by the phase.
The above measures are utilized with other fixed
indicators for each phase (such as link length and
number of lanes) to estimate the so-called green
weight for each phase, which is subsequently used in
estimating the green splits for all the intersection
traffic signal phases.
The devised fuzzy controller is assessed using a
mesoscopic simulation model (developed as a Visual
Basic Application VBA embedded EXCEL macro),
which can be then easily integrated with any fuzzy
logic controller. The FLM is integrated with the
simulation model via a two-way communication
protocol coded as a wrapper module macro in
EXCEL. The DLL representing the FLM is linked to
the simulator and receives inputs on the traffic
measures (representing the field detectors data). The
DLL estimates the traffic signal phase green splits
for the next time interval, etc. The estimated green
splits are then used by the simulator to simulate the
next time cycle. The calibration of the FLM is done
via systematic sensitivity analysis as will be
discussed later.
3 SIGNAL CONTROL FUZZY
LOGIC STRUCTURE
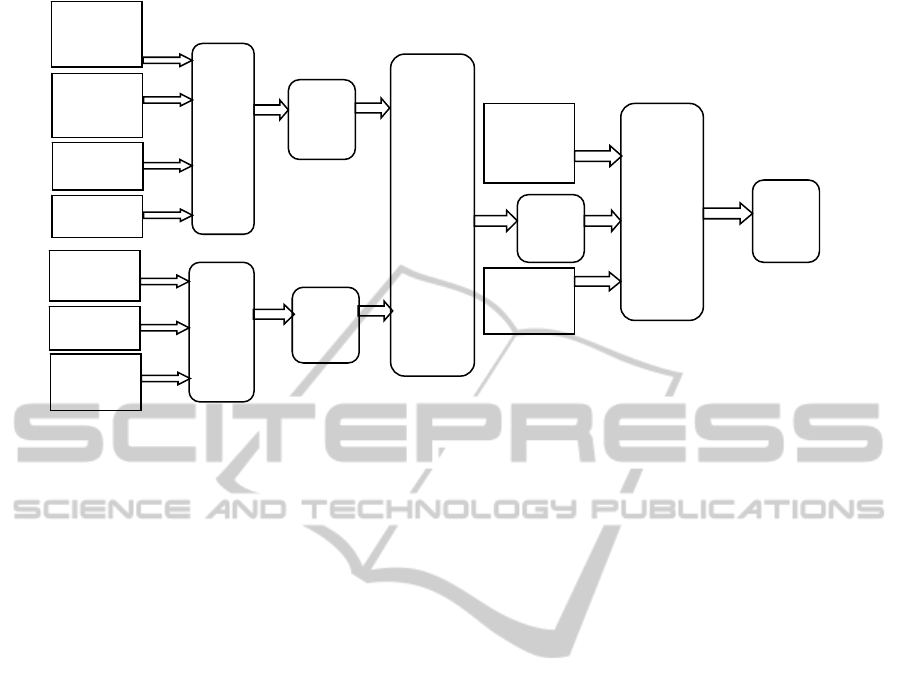
Figure 1 shows the fuzzy system structure including
input variables, rule blocks and output variables. The
connecting lines symbolize the data flow among the
various rule blocks. As shown, the system comprises
four rule blocks denoted by RB1, RB2, RB3 and
RB4. The first rule block (RB1) has four inputs; the
incoming approach’s average speed (km/hr), the
vehicular flow (veh/hr/lane), the length (m), and the
number of lanes. The second rule block (RB2) has
three input variables; traffic count on approach
(pcu), queue count on approach (pcu), and the truck
percentage. The time varying input variables are
calculated using the traffic status estimators (Hawas,
2010). The third rule block (RB3) has two
intermediate inputs; the output variables of the first
and second rule blocks. These are denoted by the
green weight I and II. The output of the third rule
block is denoted by the total green weight, which
represents the sum of these input variables (green
weight I and green weight II).
The fourth rule block (RB4) has three inputs; the
total green weight (the output of the third rule
block), the downstream blockage index, and the
transit vehicle indicator (a binary variable: 1 if a
transit vehicle is to be served during the current
cycle and 0 otherwise). The overall system output is
denoted by the “final weight” and it represents the
estimated weight given to the traffic light phase that
serves the approach under consideration.
The two rule blocks RB1 and RB2 complete each
other in estimating the green weight. With reference
to Figure 2, RB3 acts as “addition” rule block
(adding the initial weights estimated by the RB1 and
RB2). The result of such addition (output of RB3) is
then combined with the effect of the downstream
blockage [if activated] and the transit vehicle pre-
emption [if activated] in RB4. The multiple rule
block structure of the FLM is widely recommended
in literature as it simplifies the sensitivity analysis,
the calibration process of the fuzzy memberships,
and the identification of the most significant
contributing factors.
The results of the fuzzy-logic inference process
are linguistic terms describing the output variable
(e.g. Low Final-Weight, Medium Final-Weight, etc).
Each linguistic term covers a specific range of
numerical values. The defuzzification process is
responsible for converting the linguistic terms to
numerical crisp values (of this particular range).
The crisp value obtained by the defuzzification
process represents the system’s estimate of the
approach (phase) green weight. The weight is a real
number representing the “importance” of serving
this particular traffic light phase; the higher the
weight, the more the green to assign to this phase.
The green split,
,i
g
of any phase
and
intersection i is estimated using a proportion formula
that entails the weight of the phase,
W
j
as follows:
1
,
*
W
W
Gg
ii
(1)
Where:
,i
g
: Actual green time of phase
at intersection i
: Total number of phases
i
G
: Total actual green time at intersection i
W
: Estimated weight by the FLM for phase
4 EXPERIMENTAL ANALYSES
AND RESULTS
To assess the effectiveness of the FLM, several
A FUZZY LOGIC MODEL FOR NETWORK SIGNAL CONTROL AND TRANSIT PREEMPTION
453
Average
Approach
Speed
Approach
Vehicular
Flow
Approach
Length
Numberof
Lanes
TrafficCount
onApproach
QueueCount
onA
pp
roach
Truck
Percentage
Transit
Vehicle
Preemption
Downstream
Link
Congestion
Index
RB1
RB4
RB3
RB2
Green
Weight
I
Green
Weight
II
Total
Green
Weight
Final
Green
Weight
Figure1: Traffic signal control FLM structure, and rule blocks.
simulation-based scenarios were developed. A
single four-leg intersection is tested with different
traffic and geometric characteristics representing the
different scenarios. Different approach variables
were used to introduce variability in approach flow,
length, number of lanes, free-flow speed, and truck
percentages. Each approach is assumed to be served
by a separate phase. Herein, we provide only a
sample of these scenarios as well as their results.
Each scenario is tested using a duration time of 1800
seconds to generate vehicles and 2000 seconds to
clear the network. All scenarios were also tested
using a fixed cycle time of 100 seconds.
The minimum number of phases to serve a four-
leg intersection varies based on the traffic volumes
and type of the left turning phases (protected,
permitted). For instance, if a four-leg intersection is
to be served with the left turning volumes permitted,
then a two-phase cycle would be needed. A four-
phase signal would be needed if left turning volumes
are to be served in a protected mode. In this paper, a
4-phase signal setting was used for simplicity, and to
account for the fact that any potential left turning
vehicles along the approach would have to be served
in a protected mode.
The FLM applies to any number of phases and
signal configuration (e.g. two, three, four phase
signals). For instance, for a 4-leg two-phase signal
(combining the through movements on opposing
approaches), the FLM runs similarly on all four
approaches; estimating a green weight for each.
Then, the critical approach (of each phase) is
identified as the one having higher green weight. In
the implementation of the green splits, the critical
approach green weight would be considered in
estimating the phase green times. The green time of
any phase (combining various movements) is
determined in accordance to the most critical
movement served by the phase. The logic allows for
phase skipping if the phase’s green weight is lesser
than a pre-specified threshold value (if warranted). If
a phase is skipped, the following phase in the (fixed)
sequence is activated.
The inference engine of the 4
th
rule block was
developed using sensitivity analysis. Initially, a
correlation coefficient of 1.0 was assumed between
the total green weight and the final green weight, a
negative correlation (of -1.0) between the
downstream congestion index and the final green
weight, and a positive correlation of (1.0) between
the final green weight and the transit vehicle
preemption. The four experimental scenarios (in
Table 1) were run and the average vehicle travel and
delay times were estimated. The correlation
coefficients were then slightly adjusted and again the
average travel and delay times were estimated. The
process of readjusting the correlation coefficients
and the estimation of the travel and delay times were
repeated until the system converges to minimal
travel and delay times. The correlation coefficients
corresponding to the minimal travel and delay times
are 0.9, -0.8 and 0.75 for the total green weight, the
downstream congestion index and the transit vehicle
preemption, respectively.
The “base” Scenario (I) represents a medium
congested network, assumes no downstream
congestion and no transit preemption. The other
three scenarios are similar to scenario I (in terms of
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
454

the speed, the vehicular flow, the link length, the
number of lanes and the truck percentage), but they
differ in the downstream congestion values and/or
the transit preemption.
Several other scenarios were previously tested
and reported in Hawas (2010) using the isolated
signal FLM. The reported scenarios accounted only
for variations in the input variables of RB1 and RB2.
They also accounted for scenarios with and without
“knowledge estimator” activated. No consideration
was given in Hawas (2010) to the downstream
congestion effect or to the transit vehicle preemption
influence [the inputs to RB4]. This paper extends on
the work presented earlier in Hawas (2010) by
accounting for the downstream congestion and the
transit preemption.
The analysis presented in this paper focuses on
illustrating how the resulting FLM green times are
influenced by the downstream congestion index and
the transit vehicle preemption variables. That is,
how will the green times patterns correspond to
various patterns of network congestion and transit
preemption scenarios.
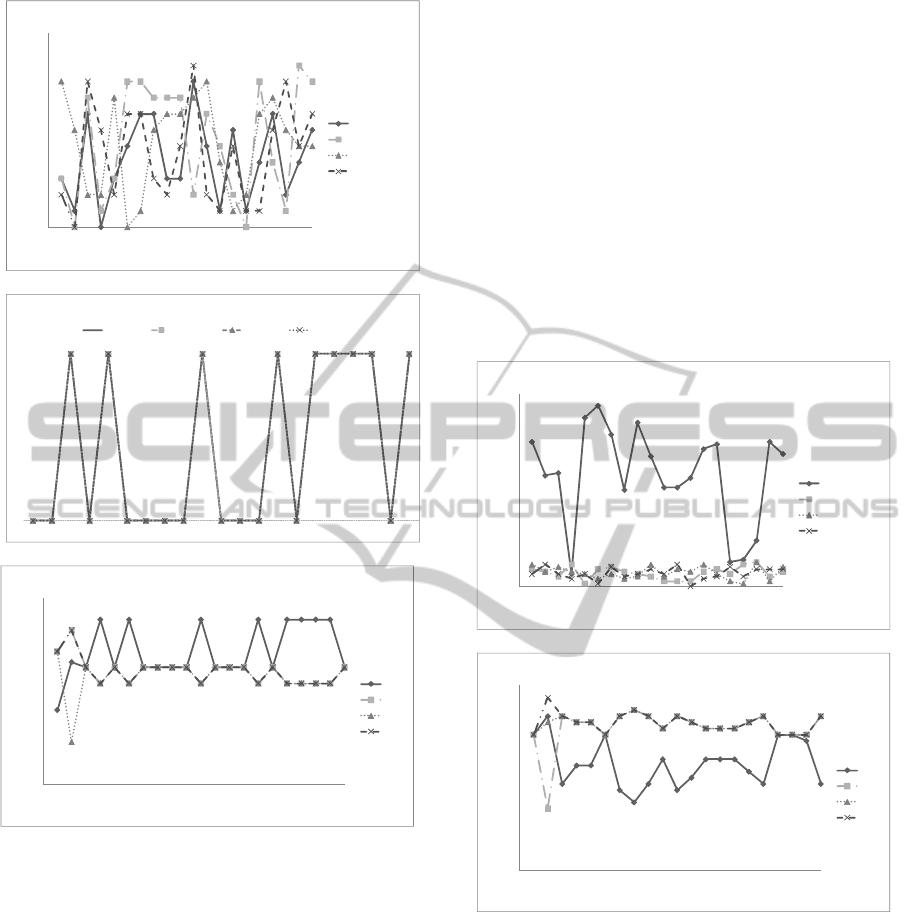
Figure 2 illustrates the results of scenario I.
Figures 2A and 2B shows the estimated queue
length and the traffic count on each approach
(estimated by the knowledge estimator). Because of
the identical traffic conditions on all approaches
(speed, traffic volume, link length, number of lanes,
truck percentage), the approaches exhibit similar
queue length and traffic count patterns. The resulting
green times (of the FLM) are equal among the
various phases as shown in Figure 2C.
Table 1: Basic information of different tested scenarios.
Scenario*
Downstream congestion
index
Transit vehicle pre-
emption
I
10% or less on
downstream links of all
approaches
No transit preemption
II
10% or less on
downstream links of all
approaches
Transit preemption on
NB approach only
III
80% or less on
downstream link of NB
approach
No transit preemption
IV
80% or less on
downstream link of NB
approach
Transit pre-emption
on NB approach only
*All scenarios are set equal in link speed, link length, number of
lanes, link vehicular flow, and truck percentage (60 km/hr speed,
500 veh/hr/lane vehicular flow, 500 m length, 2 lanes and 10%
trucks).
2
6
11
13
11
4
8
7
2
4
11
6
12
5
2
7
10
6
1
0
5
4
9
3
14
6
8
6
2
5
6
77
4
5
1
8
11
00
2
3
11
8
7
3
7
55
3
8
4
6
4
11
5
1
00000000000
1
0000
1
00000
0
2
4
6
8
10
12
14
16
1234567891011121314151617181920
QueueLength(PCU)
Cycle
QueueLength
North
West
South
East
(2A) Approach queue length (in PCU).
3
12
16
20
11
10
16
8
6
7
13
7
14
6
5
8
12
11
1
0
66
16
8
17
12
11
12
8
6
7
12
10 10
8
2
9
12
00
7
5
11
14
13
7
15
7
6
4
9
77
4
3
4
7
6
00
22
3
1
3
2
1
4
3
6
3
4
10
5
4
1
2
9
00
0
5
10
15
20
25
1234567891011121314151617181920
ApproachVolumeCount(PCU/Lane)
Cycle
ApproachVolumeCount
North
West
South
East
(2B) Approach volume count (PCU/lane).
22
7
22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 2222
24
22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 2222
21
22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 2222
35
22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22
0
5
10
15
20
25
30
35
40
12345678910111213141516171819202122
PhaseGreenTime(sec)
Cycle
PhaseGreenTimes
North
West
South
East
(2C) Phase green times (sec).
Figure 2: Results of experimental scenario I.
Scenario II is quite similar to scenario I. Slight
congestion is exhibited on the downstream
approaches (a congestion index of 10% or less) as
shown in Figure 3A. The only difference (between
the two scenarios) is that the transit vehicles
incoming on the North bound (NB) approach are
pre-empted (in scenario II). Figure 3B illustrates the
cycles during which transit vehicles arrive at the
intersection. The resulting FLM signal green times
(in Figure 3C) are somehow identical for all the
approaches except the NB. The resulting green time
pattern of the NB approach (in Figure 3C) is
consistent with the transit vehicle arrival pattern
(Figure3B).
A FUZZY LOGIC MODEL FOR NETWORK SIGNAL CONTROL AND TRANSIT PREEMPTION
455
3
1
7
0
3
5
77
33
9
5
1
6
1
4
7
2
4
6
3
0
8
1
3
99
888
2
7
5
2
0
9
4
1
10
99
6
22
8
0
1
6
77
8
9
4
1
2
7
8
6
55
2
0
9
6
2
77
3
2
5
10
2
1
5
11
6
9
5
7
0
2
4
6
8
10
12
123456789101112131415161718192021
DownstreamBlockageIndex
Cycle
DownstreamCongestion
Dn_Str‐Cong_N
Dn_Str‐Cong_W
Dn_Str‐Cong_S
Dn_Str‐Cong_E
(3A) Downstream approach congestion index.
00
1
0
1
0000
1
000
1
0
1111
0
1
00
0
0
0
0000
0
000
0
0
0000
0
0
00
0
0
0
0000
0
000
0
0
0000
0
0
00
0
0
0
0000
0
000
0
0
0000
0
0
123456789101112131415161718192021
Transit
Transit_N Transit_W Transit_S Tra nsit_E
(3B) Transit vehicles arrival pattern.
14
23
22
31
22
31
22 22 22 22
31
22 22 22
31
22
31 31 31 31
22
25
29
22
19
22
19
22 22 22 22
19
22 22 22
19
22
19 19 19 19
22
25
8
22
19
22
19
22 22 22 22
19
22 22 22
19
22
19 19 19 19
22
25
29
22
19
22
19
22 22 22 22
19
22 22 22
19
22
19 19 19 19
22
0
5
10
15
20
25
30
35
12345678910111213141516171819202122
PhaseGreenTime(sec)
Cycle
PhaseGreenTimes
North
West
South
East
(3C) Phase green times (sec).
Figure 3: Results of experimental scenario II.
Scenario II represents the case of the FLM
control system that is not only reactive to the traffic
conditions along the incoming approaches, but also
reactive to the incoming transit vehicles. Currently,
all transit vehicles are pre-empted equally. That is,
the FLM operates with a binary variable that
activates the system’s transit pre-emption logic,
without providing any preferential treatment to
various transit vehicles. The FLM shall be extended
in further research to provide various levels of pre-
emption based on the vehicle type, the transit
vehicle’s passenger occupancy and the distance
between the transit vehicle and the approach’s stop-
line.
Scenario III is developed by introducing slight
variations to scenario I. Similar to scenario I, slight
congestion is exhibited on the downstream
approaches of the intersection (a congestion index of
10% or less) as shown in Figure 3A. Only the
downstream of the NB approach exhibits oscillating
congestion (congestion index of 80% or less) as
shown in Figure 4A. The transit pre-emption is
activated. The resulting FLM signal green times (in
Figure 4B) of the NB approach is lesser than that of
the other approaches (although the traffic conditions
are identical). The FLM (due to the congestion
downstream the NB approach) allocates lesser green
times to the NB phase. The higher the congestion
index, the lesser the green times.
60
46
47
5
70
75
63
40
68
54
41 41
45
57
59
10
11
19
60
55
7
6
4
9
1
7
8
6
5
4
222
6
7
5
9
10
4
6
9
6
8
6
5
3
5
3
4
9
4
7
6
9
5
2
1
10
2
8
5
9
5
3
5
1
8
4
5
7
5
9
0
3
4
8
4
777
0
10
20
30
40
50
60
70
80
123456789101112131415161718192021
Downstream BlockageIndex
Cycle
DownstreamCongestion
Dn_Str‐Cong_N
Dn_Str‐Cong_W
Dn_Str‐Cong_S
Dn_Str‐Cong_E
(4A) Downstream approach congestion index.
22
25
14
17 17
22
13
11
14
18
13
15
18 18 18
16
14
22 22
21
14
22
10
25
24 24
22
25
26
25
23
25
24
23 23 23
24
25
22 22 22
25
22
24
25
24 24
22
25
26
25
23
25
24
23 23 23
24
25
22 22 22
25
22
28
25
24 24
22
25
26
25
23
25
24
23 23 23
24
25
22 22 22
25
0
5
10
15
20
25
30
12345678910111213141516171819202122
PhaseGreenTime(sec)
Cycle
PhaseGreenTimes
North
West
South
East
(4B) Phase green times (sec).
Figure 4: Results of experimental scenario III.
Scenario IV combines the congestion
downstream the NB approach (Figure 5A) and the
transit preemption on the NB approach (Figure 5B).
The resulting NB green times as such oscillates to
balance the two conflicting criteria; lesser green time
due to the downstream congestion and the higher
green time due to the transit preemption. The
resulting green times of the various intersection
phases is illustrated in Figure 5C.
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
456

54
15
44
60
11
22
7
21
72
31
41
75
58
28
59
57
50
18
69
62
9
5
10
9
7
5
8
3
2
9
6
9
1
4
6
7
3
7
4
2
9
10
2
3
7
3
0
8
9
66
4
3
1
8
5
9
5
88
4
8
33
99
4
9
333
4
3
10
44
8
11
6
0
10
20
30
40
50
60
70
80
123456789101112131415161718192021
DownstreamBlockageIndex
Cycle
DownstreamCongestion
Dn_Str‐Cong_N
Dn_Str‐Cong_W
Dn_Str‐Cong_S
Dn_Str‐Cong_E
(5A) Downstream approach congestion index.
000
1111
0
1
0
111
00
11
0
11
0000
0000
0
0
0
000
00
00
0
00
0000
0000
0
0
0
000
00
00
0
00
0000
0000
0
0
0
000
00
00
0
00
0
123456789101112131415161718192021
Transit
Tra nsit_N Tra nsit_W Transit_S Transit_E
(5B) Transit vehicles arrival pattern.
14
11
15
22
28
26
31
30
22
30
12
29
28
24
15
20
26 26
16
31
2525
29
24
22
20
21
19 19
22
19
25
20 20
21
24
23
21 21
24
19
21
25
34
24
22
20
21
19 19
22
19
25
20 20
21
24
23
21 21
24
19
21
25
13
24
22
20
21
19 19
22
19
25
20 20
21
24
23
21 21
24
19
21
0
5
10
15
20
25
30
35
40
12345678910111213141516171819202122
PhaseGreenTime(sec)
Cycle
PhaseGreenTimes
North
West
South
East
(5C) Phase green times (sec).
Figure 5: Results of experimental scenario IV.
5 CONCLUSIONS AND FUTURE
RESEARCH
This paper presented a FLM that can be coupled
with smart “processing” tools to estimate several
traffic measures from multiple detectors on each
approach. The estimates obtained from this
processing tool are integrated as inputs into the
FLM. The FLM explicitly accounts for the
congestion on the links downstream the controlled
intersection. As such, the FLM can be regarded as a
semi-network control procedure. The FLM can also
adjust the signal settings to provide transit
preemptions. The presented FLM was tested with
four scenarios to assess the sensitivity of the model
to the downstream and the transit preemption
variables.
The resulting green time patterns clearly
illustrate the sensitivity of the FLM to the
congestion and the transit preemption variables.
More research is being undertaken to demonstrate
the presented model effectiveness in real-life
conditions. Also, comparative analysis of the
presented FLM effectiveness vis-à-vis other real-
time signal controllers shall be considered for future
research.
Further appealing improvement to the system can
be achieved by further processing of the raw data to
have estimates of the expected approach delays. The
green splits can be then adjusted to explicitly assign
green weight based on expected delay estimates.
This will be considered for the future upgrades of
the FLM. More sophisticated knowledge can be
formed by considering more than two detectors, and
better accuracy can be sought through modifying the
detector locations.
The presented FLM control system is not only
reactive to the traffic conditions along the incoming
approaches, but also reactive to the incoming transit
vehicles and the downstream approaches congestion.
Currently, all transit vehicles are pre-empted
equally. That is, the FLM operates with a binary
variable that activates the system’s transit pre-
emption logic, without providing any preferential
treatment to various transit vehicles. The FLM shall
be extended in further research to provide various
levels of pre-emption based on the vehicle type, the
transit vehicle’s passenger occupancy and the
distance between the transit vehicle and the
approach’s stop-line.
The downstream congestion is modelled herein
through congestion index that quantifies the degree
of downstream link occupancy. Future research shall
include the coupling of the FLM with smart
processors that can utilize the downstream
approach’s detector readings to provide better
estimates of the downstream congestion status; the
distribution of the vehicles, and extent of queues
along the downstream links.
Moreover, the FLM shall be also restructured as
a multi-level control system for incident detection,
signal control and transit priority. These systems
however if deployed individually may result in
conflicting decisions and as such they need to be
integrated to insure consistency of decisions leading
to optimized traffic network performance. The
multi-level FLM is envisaged to comprise three
A FUZZY LOGIC MODEL FOR NETWORK SIGNAL CONTROL AND TRANSIT PREEMPTION
457

levels. The first level shall be responsible for
detecting incidents in urban networks using field
street detectors. The second level shall operate a
heuristic based logic for real-time signal control with
extended capabilities to operate special scenarios if
incidents are detected, aiming at better traffic
management during such incidents. The third level
shall deploy several strategies for transit vehicles
priority. The three levels shall operate in a closed
loop fashion to insure consistency of decisions and
better traffic management. The system shall be
tested within a simulation-based environment under
various operational conditions reflecting network
congestion, incident situations, and transit demand
patterns.
REFERENCES
Bingham, E., 2001. “Reinforcement learning in neuro-
fuzzy traffic signal control”, European Journal of
Operational Research 131, pp. 232-241.
Chou C. and Teng, J., 2003. “A fuzzy logic controller for
traffic junction signals” Information Sciences 143. pp
73–97.
Hawas, Y. E., 2007. “A Fuzzy-Based System for Incident
Detection in Urban Street Networks” Transportation
Research Part C 15, pp 69–95.
Hawas, Y. E., 2010. “An integrated simulation-based
fuzzy logic model for real-time traffic signal control',
Transportmetrica,, First published on: 28 July 2010
(iFirst), pp 1-32 (URL: http://dx.doi.org/
10.1080/18128600903427645).
Henry, J. J., Farges, J. L. and Gallego, J. L., 1998. “Neuro-
fuzzy techniques for traffic control” Control
Engineering Practice 6, pp 755-761.
Kosonen, L., 2003. “Multi-agent fuzzy signal control
based on real-time simulation” Transportation
Research Part C 11, pp.389–403.
Mirchandani, P. and Head, L., 2001. “A real-time traffic
signal control system: architecture, algorithms and
analysis” Transportation Research Part C 9. pp 415-
432.
Murat, Y. S. and Gedizlioglu, E., 2005. “A fuzzy logic
multi-phased signal control model for isolated
junctions” Transportation Research Part C 13. pp.
19–36.
Niittymaki, J. and Pursula, M., 2000. “Signal control using
fuzzy logic”. Fuzzy Sets and Systems 116. pp 11-22.
Niittymaki, J. and Turunen, E., 2003. “Traffic signal
control on similarity logic reasoning” Fuzzy Sets and
Systems 133, pp. 109–131.
Palacharla, P. V. and Nelson, P. C., 1999. “Application of
fuzzy logic and neural networks for dynamic travel
time estimation” International Transactions in
Operational Research 6, pp 145-160.
Sugeno, M. and Nishida, M., 1985. “Fuzzy control to
model car”. Fuzzy Sets and Systems 16, pp. 103–113.
Traiba, M. B., Kaseko, M. S. and Ande, M., 1999. “A two-
stage fuzzy logic controller for traffic signals”
Transportation Research Part C 7, pp. 353-367.
Wen, W., 2007. “A dynamic and automatic traffic light
control expert system for solving the road congestion
problem” Experts Systems and Applications,
doi:10.1016/j.eswa.2007.03.007.
Zimmermann, H. J., 1996. Fuzzy Set Theory, Kluwer
Academic Publishers, Dordrecht. 1996.
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
458
