
SURFACE EMG CLASSIFICATION FOR PROSTHESIS
CONTROL
Fuzzy Logic vs. Artificial Neural Network
Siti Anom Ahmad
1
, Mohd Asyraf Khalid
1
, Asnor J. Ishak
1
and Sawal H. M. Ali
2
1
Department of Electrical and Electronic Engineering, Faculty of Engineering, Universiti Putra Malaysia
Serdang, Selangor, Malaysia
2
Department of Electrical, Electronics and System, Faculty of Engineering and Built Environment
Universiti Kebangsaan Malaysia, Bangi, Selangor, Malaysia
Keywords: Prosthesis control, Electromyography, Classification, Fuzzy logic, Artificial neural network.
Abstract: Electromyography control system (ECS) is a well-known technique for prosthesis control application. It
consists of two main modules namely feature extraction and classification. This paper presents the
investigation of the classification module in the ECS. The surface electromyographic (EMG) signals were
recorded from flexor and extensor muscles of the forearm during wrist flexion and extension. Standard
deviation and mean absolute value were used to extract information from the raw EMG signals. Two
different classifiers, fuzzy logic and artificial neural network were used in investigating the surface EMG
signals. The classifier is responsible to determine the movement of the subject’s limb during specific
moment. The two classifiers were compared in terms of their performance.
1 INTRODUCTION
Prosthetic hand has been designed to provide
replacement to people with hand or complete arm
amputation. In the USA, there are approximately
40,000 people registered with hand amputation and
this number is increasing every year. In the last 30
years, the amputees had been provided with either
passive or active prosthetic hands to help them in
their daily lives. However, a survey shows that there
are 30% to 50% of the handicapped did not use the
prosthetic hands regularly (Hardeep and Arora
2010). Among the reasons for the rejection are
heavy weight, limited functionality and stiff/robot
like movement.
Continuous studies and researches have been
carried out in improving the prosthetic hand design
with the main aim to have a hand that can best
mimic a normal human hand. To improve the
functionality of the hand, two main factors have to
be considered in the development process. These
two factors are the structural design and the control
mechanism of the hand. Rapid growth in the
structural design of the prosthetic hand can be seen
and there is renewed interest in the development of
hands with multiple degrees of freedom that lead to
multiple grip hand postures (Mitchell, 2008). The
control mechanism has become the main concern in
the prosthetic hand development process. Various
methods have been proposed in controlling the
operation of a prosthetic hand and surface
electromyography has become the preferred
technique for the control mechanism of the
prosthesis control application (Hudgins, 1999;
Ajiboye, 2005) The concept of using surface
electromyography signal for prosthesis control
started in the 1940s (Plettenburg, 2006). By using
the residual muscles on the amputee's arm, they can
be used as the control channel to determine the final
movement of the hand. The simplest application is to
either open or close hand.
Electromyography (EMG) signal is a technique
that is used to describe electrical current produced
by skeletal muscles during contractions. In general,
EMG can be categorized into two: needle and
surface EMG. The later type is the most commonly
used in many applications as it is totally non-
invasive and low cost. Surface EMG (SEMG) finds
application in many areas that include rehabilitation
of disabled (Huang, 1999), prosthetics (Nagata,
2004); (Chappell, 2009)
and human computer
317
Anom Ahmad S., Asyraf Khalid M., J. Ishak A. and H. M. Ali S..
SURFACE EMG CLASSIFICATION FOR PROSTHESIS CONTROL - Fuzzy Logic vs. Artificial Neural Network.
DOI: 10.5220/0003696603170320
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2012), pages 317-320
ISBN: 978-989-8425-89-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

interface (Fukuda, 2004). The commonality in these
systems is the need to classify SEMG to identify the
control commands. These examples and many others
(Huang, 1999); (Tsuji, 2000) used multichannel
EMG for the purpose of discrimination between
classes (Kumar, 2008).
EMG has been used to control the movement of
a prosthetic hand and known as EMG control system
(ECS). Two main processes involve in the prosthesis
control system are feature extraction and
classification. Feature extraction process is where
the raw SEMG signal is represented into a feature
vector which is then used to separate the desired
output, e.g. different hand grip postures. Various
feature extraction techniques have been reported in
this prosthesis control field. Mean absolute value
(MAV) has been the most widely used method to
extract information from a SEMG signal (Hudgins,
1999); (Chan, 2000). The information obtained in
the feature extraction will then be fed to a classifier.
A classifier is responsible in mapping different
pattern and matches them appropriately to determine
the final output. Artificial neural network (ANN) is
one of the classification methods and has been used
in most of the EMG classification systems reported
in the literature (Hudgins, 1999); (Ajiboye, 2005).
Another method that has been used for classification
is fuzzy logic (FL) (Chan, 2000); (Weir, 2003).
The objective of this work is to compare two
classification techniques; ANN and FL in finding the
final grip posture of a prosthetic hand. The research
will focus on evaluating the performance between
these two classifiers in terms of accuracy in
classifying the SEMG data. Other aspects of
performance are also discussed.
2 METHODOLOGY
The EMG dataset used to test the methods was
obtained from the University of Southampton, in UK
(Chappell, 2009). The EMG signals were recorded
from five participants’ forearm muscles, namely
flexor carpi ulnaris (FCU) and extensor carpi radialis
(ECR) with a reference electrode at the elbow. The
participants were asked to do wrist flexion and
extension. The signals were recorded using Noraxon
Ag/AgCl dual electrodes (diameter 15 mm, centre
spacing 20mm). The procedures for surface
electrodes placement were referred from SENIAM
(Hermans, 1999). Prior to the electrode placement,
the electrodes sites were prepared by cleansing the
skin surface with rubbing alcohol to reduce the
impedance at the surface.
The recorded EMG signals were post-processed
for further analysis. Two methods were used in the
feature extraction stage are standard deviation (SD)
and mean absolute value (MAV).
To preserve the information in the EMG signals,
the whole data was divided into overlapping
segments. Each segment consists of 200 data points
and the current segment overlaps with the previous
segment by 50 points. A moving data window was
applied to the data sequence and the SD and MAV
within the data were calculated repeatedly.
The extracted features were then fed into two
types of classifier: ANN and FL. The output from
the classifiers will be different postures of hand
grips. However, in this work the grip postures are
represented in the ‘STATE’ form. Based on two
inputs, SD and MAV, both classifiers will give one
final output which is STATE1, STATE2 or
STATE3.
For the FL classifier design, a Mamdani type
fuzzy logic was used in. The rules were created
based on states of contraction and the design process
ran over a few cycles of analysis until the most
optimum classification system is achieved and it was
done manually. The shapes for the inputs in the
membership function were the S-type and the output
was in triangular shape only. The defuzzification
will be set to centroid. Two FL classification
systems have been developed, which are with and
without solver. Solver is an additional tool in
Simulink to smooth the graph by building a time of
the next simulation step and applies a numerical
method to solve the set of ordinary differential
equations that represent the model. Figure 1 shows
the Simulink model for the FL classification system
without solver.
Figure 1: Simulink model for the FL classification system.
Initially, the project was to use only two inputs
from SD and MAV. But during the rule building, it
is found out that it is difficult to differentiate
between State 1 and State 3 for the same amplitude.
Thus to solve the problem, another set of input was
added. The new input is the difference of current
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
318
value of SD with the previous value of SD. To
simplify the calculation, the sign (positive or
negative) was omitted because it also exhibits same
results.
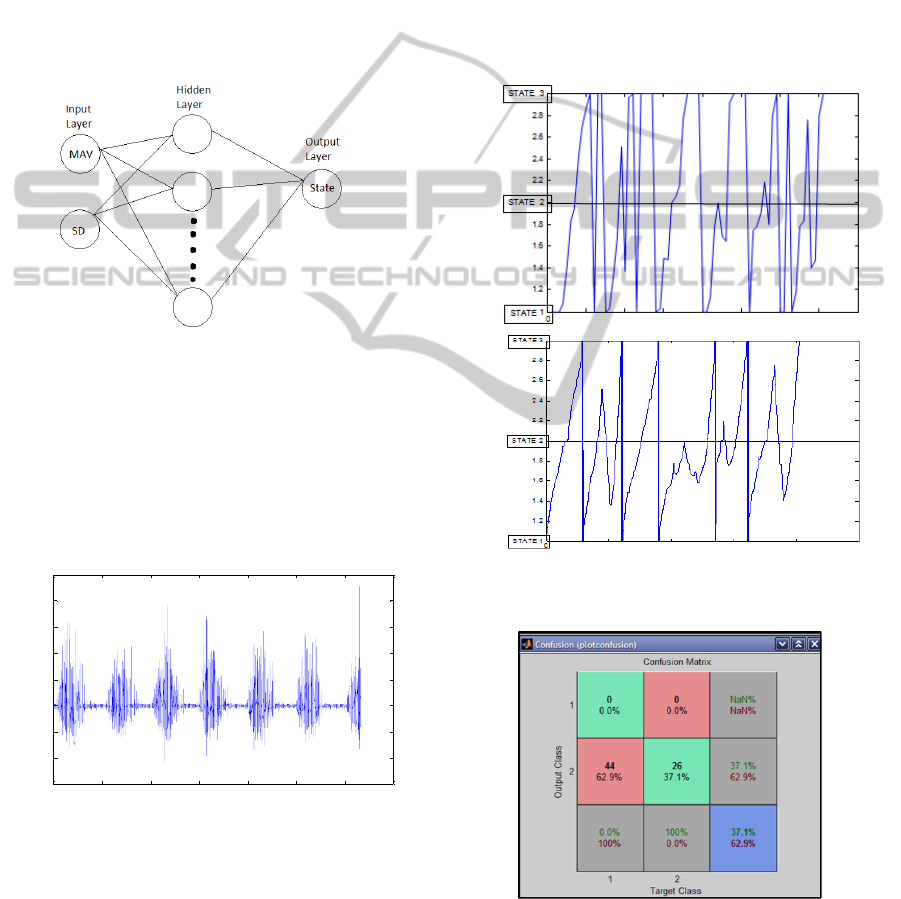
For the ANN classifier design shown in Figure 2,
two layers feed forward ANN with two hidden
layers were used. Feed forward method was chosen
instead of feedback due to its simplicity and easily
understood algorithm. The number of neurons used
was 20 in order to make sure that ANN does not
consume too much computational resources. For the
validation of the network, two datasets have been
created; training and test datasets.
Figure 2: ANN classification system block diagram.
3 RESULTS AND DISCUSSION
Figure 3 show the EMG signals during wrist
extension recorded from ECR respectively. The
muscles contractions can be seen clearly as there are
distinguishable low voltage period between them.
Figure 3: EMG signals during wrist extension from ECR.
The results (SD and MAV) obtained in the
feature extraction stage were then used in the rules
and membership functions development in fuzzy
classifier and algorithm development in ANN.
The classification result for FL and ANN are
shown in Figure 4 and Figure 5 respectively. For
ANN classifier, the classification results were
presented using confusion matrix diagram and one
of the results is shown in Figure 5. For the FL
classification, the results are based on with and
without solver.
The performance of the classifiers was
determined by calculating the percentage of
accuracy. The accuracy was obtained by calculating
the length of the points that not in its desired
position. The total misaligned are divided by the
total of time are and multiplied with 100%. The
ideal graph for each segment is assumed to be linear
thus the points that fall off of its threshold are
considered misclassified (inaccurate).
(a)
(b)
Figure 4: FL classification results (a) without solver and
(b) with solver.
Figure 5: ANN classification result from FCU.
Table I shows the accuracy for both classifiers.
In term of accuracy, the fuzzy classifier obviously is
the best choice by exhibiting more than 90%
0 2 4 6 8 10 12 14
-150
-100
-50
0
50
100
150
200
250
Time/ s
uV
SURFACE EMG CLASSIFICATION FOR PROSTHESIS CONTROL - Fuzzy Logic vs. Artificial Neural Network
319

accuracy while the ANN classifier only exhibit
around 30% to 60% accuracy. This is due to the fact
that the fuzzy classifier has rules that can easily
distinguish between states. As for ANN classifier, it
needs to build the algorithm based on the training
data. This means that if the training data is lacking in
some aspects, then the accuracy of study data will
also be affected. In this project, the study data size is
small thus producing vulgar and incomplete patterns.
This affects the accuracy of the result due to the
difficulty of the algorithm to recognize the pattern
from the data. This can be solved by introducing
larger training data set.
Table 1: Classification accuracy.
FL
ANN
without Solver with solver
FCU 83.0% 97.8% 62.0%
ECR 82.9% 97.1% 37.1%
In term of automation, ease of use and capability
to adapt to various samples, the ANN classifier is a
better choice than fuzzy classifier. This is due to the
fact that the user only needs to introduce the input
and the target and the ANN will automatically create
an algorithm and network to recognize the study
data. On top of that, an accurate network that was
produce by ANN can be used on various samples
due to its learning capability. As for fuzzy classifier,
the user need to determine by them the membership
function, rules and need to calculate the accuracy
manually thus consuming a lot of time. However, it
is not a drawback to FL as automatic tuning is
possible (G. Panoutsos, 2010). The main advantage
of FL is the data doesn’t need to be trained like
ANN.
4 CONCLUSIONS
The study is to compare two classification methods
namely FL and ANN to determine the final output
from the extracted SEMG signals of the forearm.
The signals were recorded from FCU and ECR
during wrist flexion and extension respectively.
From the classification accuracy, it shows that
FL gave higher accuracy (>80%) compared to ANN
classifier (60%). This is due to small data size that
leads to the difficulty of the ANN model
development to recognize the pattern. The
performance can be improved by introducing larger
training data set.
REFERENCES
Ajiboye, A. W., R. (2005). "A Heuristic Fuzzy Logic
Approach to EMG Pattern recognition for
Multifunction Prosthesis Control." IEEE Transactions
on Biomedical Engineering 52(11): 280-291.
Chan, F. Y.-S., Y., Lam, F.; Yuan-Ting, Z; Parker, P.
(2000). "Fuzzy EMG Classification for Prosthesis
Control." IEEE Transactions on Rehabilittaion
Engineering 8(3).
Chappell, S. A. A. a. P. H. (2009). "Surface EMG Pattern
Analysis of the Wrist Muscles at Different Speeds of
Contraction." Journal of Medical Engineering and
Technology 33( 5,): 376-385.
Fukuda, O., and Tsuji, T. (2004). Control of an Externally
Powered Prosthetic Forearm Using Raw-EMG
Signals. SICE.
G. Panoutsos, M. M. (2010). "Neural-Fuzzy Modelling
Framework based on Granular Computing: Concepts
and Application." Fuzzy Sets and system 161(21):
2802-2830.
Hardeep S. Ryait; Arora, A. S. R. A. (2010).
"Interpretations of Wrist/grip Operations From SEMG
Signals at Different Locations on Arm." IEEE
Transactions on Biomedical Circuits and Systems
4(2): 101 - 111.
Hermans, H. F., B.; Merletti, R.; Stegeman, D.; Blok, J.;
Rau, G.; Disselhorst-Klug, C.; Hagg, G. (1999).
SENIAM 8, European Recommendations for Surface
Electromyography, results of the SENIAM Project,
Rossingh Research and Development.
Huang, H., and Chen, C. (1999). Development of a
Myoelectric Discrimination System for a Multi Degree
Prosthetic Hand. IEEE International Conference on
Robotics & Automation, Detroit, Michigan.
Hudgins, B. P., P.; Scott, R. N. (1999). "A New Strategy
for Multifunction Myoelectric Control." IEEE
Transactions on Biomedical Engineering 40(1): 82-94.
Kumar, V. P. S. a. D. K. (2008). Classification of Low-
level Finger Contraction from Single Channel Surface
EMG. 30th Annual International IEEE EMBS
Conference, Canada.
Mitchell, W. R. M. (2008). Development of a Clinically
Viable Multifunctional Hand Prosthesis. Myoelectric
Controls/Powered Prosthetics Sympossium, New
Brunswick, Canada.
Nagata, K., and Magatani, K. (2004). Development of the
Assist System to Operate a Computer for the Disabled
Using Multichannel Surface EMG. Proceedings of
26th Annual International conference of the IEEE
Engineering in Medicine and Biology Society.
Plettenburg, D. H. (2006). Upper Extremity Prosthetics,
Current Status & Evaluation, VSSD.
Tsuji, T. a. K., K. (2000). An EMG Controlled Pointing
Device Using a Neural Network. SICE.
Weir, R. A., A. (2003). A Multifunction Prosthesis
Controller Based on Fuzzy Logic Technique.
Proceedings of the 25th Annual International
Conference of the IEEE/EMBS.
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
320
