
EnvEdit - A GRAPHICAL ENVIRONMENT EDITOR
Approaches towards a Fast and Simple Way of Building Complex Environments
in Multi Agent Simulations
Christoph Schwarz
1
, Jan Busch
2
, Carsten Beth
1
, J
¨
urgen Sauer
2
and Axel Hahn
2
1
OFFIS - Institute for Information Technology, Escherweg 2, Oldenburg, Germany
2
Department of Computing Science, Carl von Ossietzky University, Ammerl
¨
ander Heerstrasse 114-118
Oldenburg, Germany
Keywords:
Multi agent systems, MASON, Graphical editors, Simulation.
Abstract:
Multi Agent Simulations are well known and widely-used simulations which can simulate embodied agents in
neighbourhoods or environments. The designing of such environments has, so far, mainly to be done by hard
coding them directly in the simulation source code.
In this paper we present EnvEdit, a graphical environment editor for MASON. EnvEdit leads to a less time
consuming and less error-prone design of environments.
1 INTRODUCTION AND
MOTIVATION
The simulation of complex processes is increasingly
performed with the help of multi agent systems
(MAS). A Java Framework for multi-agent simula-
tions in which agents, at least in part, can represent
physical entities is MASON - Multi Agent Simulation
Of neighbourhoods ((Balan et al., 2003), (Luke et al.,
2005)). The framework allows you to create com-
plex simulations by providing a few base classes from
which the agents inherit then. In the design of such
a simulation there is often a distinction between the
acting agents of the simulation and the environment.
In more complex cases, the environment is also rep-
resented by agents (such as warehouses, ports, etc.)
which in addition to their position also have prop-
erties (such as size, ceiling height, storage capacity,
etc.) and which can collect data for statistic analyses
(like goods throughput).
Creating such a complex environment is effected
usually in two steps. In the first step, all agent types
that represent environmental elements (such as ware-
houses, roads, Bridges) are written and in the second
step the environment will be composed out of these
agent types. Therefore the appropriate agents first
are created and then placed in a so-called SparseGrid
with the specification of coordinates. Environments
which are composed from a large number of agents
are only very uncomfortable to create since there is
no visual feedback during the process.
In our research on intelligent and efficient means
of transport for intralogistics we need to design a
lot of slightly different warehouses (see (Beth et al.,
2009),(Ommen et al., 2009), (Ommen et al., 2010)).
In MASON this has to be done by hard coding these
environments (the warehouses) in the source code.
This process was time consuming and error-prone. In
addition, it was difficult to create the environments
and the simulation clearly seperated. Such a separa-
tion is necessary if the environments and the simula-
tions are to be created by different persons. To get rid
of these drawbacks we would like to have a graphical
editor for the environments we need for our simula-
tions.
2 MASON
MASON is a discrete-event multi agent simulation li-
brary core written in Java. It works through advancing
in simulation time in discrete steps. Per step, all the
agents will be activated once and can perform actions.
The behaviour of the agents is determined by the Java
class which represents them.
A central concept of the simulated environment in
MASON is the so-called Grid, which provides an ar-
ray of fields, which can take different values. MAS-
305
Schwarz C., Busch J., Beth C., Sauer J. and Hahn A..
EnvEdit - A GRAPHICAL ENVIRONMENT EDITOR - Approaches towards a Fast and Simple Way of Building Complex Environments in Multi Agent
Simulations.
DOI: 10.5220/0003717103050308
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 305-308
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
ON offers simple grids that store only numeric val-
ues, but these cases are not of interest for our ap-
proach. The interesting grids for EnvEdit manage
program objects by letting the fields contain one or
several references to program objects. These program
objects are the previously introduced agents and they
are placed on start up on some fields of the grid. The
agents can then interact with the grid and with each
other. The interaction of the agents may each be con-
sidered as a communication that takes place with the
help of the grid and mutual function calls. The grid al-
lows the agent via a neighbourhood function to deter-
mine which fields are adjacent to their own field and
whether or which agents are on it. Dynamic agents
can move over the grid, by go on an adjacent field.
Internally, the reference to the grid object represent-
ing the agent, is moved from one field of the grid to
another. Via the grid, all fields, and thus all agents are
reachable and available for communication.
3 EnvEdit
With the help of the developed software system,
EnvEdit, it is possible to create a variety of environ-
mental models. It is possible to save, load, and modify
the created models. The section of the model which is
shown can be zoomed, moved and reset with mouse
and keyboard interactions. The properties of the cur-
rently selected environment object can be inspected
and changed. Environment objects can be created, se-
lected and moved. It is also possible to move the ob-
ject up and down in the third dimension (to change
the ordering of the objects). The environment ob-
ject types available for the design of the environment
model can be modified with comprehensive editing
capabilities of the object descriptions.
If an environment model should be imported into
a simulation system, the EnvEdit library has to be
added to the project. The functionality of converting
an environment model into a grid usable for simula-
tion is implemented in this library. If a model was
converted into a grid, it can be used as usual in MA-
SON. The generated grid objects makes it possible to
access the environment objects which created them.
The class BaseGridObject serves as a base class
for all grid classes, which will be used during the con-
version of the environment-model in a MASON-Grid.
BaseGridObject is a MASON agent and defines func-
tions which can be used to access the system prop-
erties (like unique identifier (ID), name, position and
dimensions (width and height)) of the underlying en-
vironment object. Before a model can be loaded, all
used environment object types must be assigned to an
existing grid-class. On the part of the modelling sys-
tem, this is done by editing the object descriptions.
Each object description has a class-property, a string
whose value determines the name of the associated
grid-class. On the part of the simulation system, a
class with the appropriate name has to be created for
every such environment object type. These classes
are derived from BaseGridObject, the upper class for
all grid objects. Any required functions for objects of
that type can then be implemented in this grid-class.
4 DESIGN OF THE SYSTEM
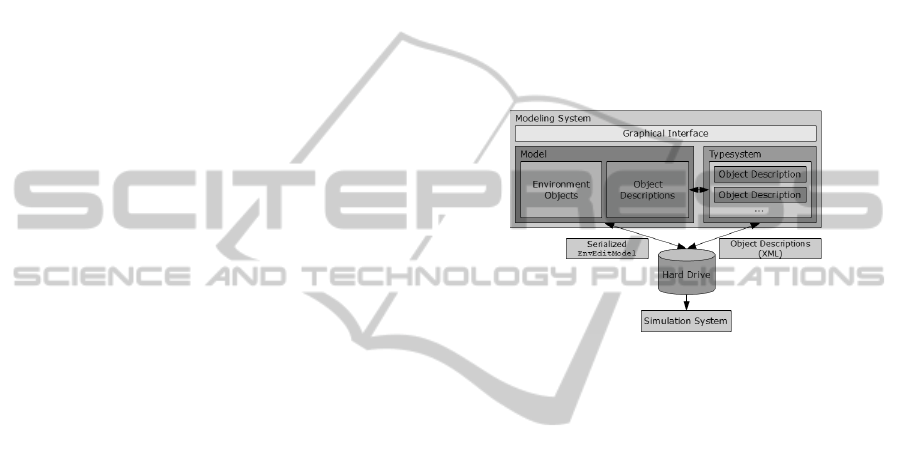
Figure 1: EnvEdit Overview.
Figure 1 shows an overview of the structure of
Envedit. We will now discuss the parts of EnvEdit
in detail.
Interface. The user interface of EnvEdit is a
standart Java/Swing user interface with the usual
mouse/keyboard support.
Type System. The type system determines how
objects are associated to Java classes. Since the editor
should be able to handle previously unknown types
of environmental objects and since the objects simul-
tanesouly should lead to different object types in MA-
SON, a flexible type system was developed.
EnvEdit uses XML to save object descriptions.
XML was used to ensure the modelling of environ-
ments completely without the need to produce Java
code. The properties which are in the object descrip-
tion can later be read directly into the simulation.
The property ”class” specifies which Java class has
to be used in the simulation for this environment ob-
ject type. The developer of simulation and the envi-
ronment must therefore ittle only on the XML object
descriptions. All other steps are then carried out inde-
pendently.
The requirement for a simple extensibility implies
that a one-to-one relationship between environment
object types and program object classes is not an op-
tion. So it had to be resolved, how a description of the
object properties in an XML file may lead to specific
ICAART 2012 - International Conference on Agents and Artificial Intelligence
306

program objects. From the type of object descrip-
tions arises that the environment objects only differ
in their type-bound properties, which can be consid-
ered as ”identifier” - ”value” pairs. Different func-
tions of the environment objects need not be depicted,
because these as well as the specific meaning of a
property’s value, only play a role in the simulation
system. Therefore a basic object class was designed
whose instances manage a list of properties. The cre-
ation of an environment object of a particular object
type creates an instance of this class with the set of
properties, specified in the description of the object.
The values of these properties can be accessed by cer-
tain functions which take the identifier of the desired
property as a parameter. Therefore in EnvEdit all the
available environment object types of the modelling
are program objects of the same class.
Model. The type system defines how the environ-
mental objects are associated to program objects dur-
ing the conversion. The model, however, describes, in
what way EnvEdit itself manages the environment.
An environment model is managed as a tree-like
structure. Environment objects can contain other En-
vironment objects, thereby hierarchical relationships
can be mapped. Environment objects that are reg-
istered in such a list at the top are covered by the
following registered environment objects. Thus, an
order can be realized in the third dimension, and
thereby spatial relationships can be modelled. The ba-
sic structure of the data is therefore a tree of objects.
The root of the tree is the EnvEditModel object that
manages a set of BaseOb ject objects. Each BaseOb-
ject can manage again a set of BaseObject objects, so
that the creation of a tree structure is possible.
In addition to managing BaseObject objects this
program object serves as a location for the entire data
concerning the given model. Besides the environment
objects the EnvEditModel also possess a collection
of Ob jectDescription objects, which describe the ob-
ject types used in this model. Object descriptions are
stored in the model, because it is the only way of en-
suring that the model can be edited on any system. If a
model is loaded on a system, the previously unknown
object descriptions are added to the repository of the
system, so that an exchange of object descriptions is
possible with the help of the model.
5 CONNECTION TO THE
SIMULATION SYSTEM
This section presents how the environment models
and the MASON simulation are connected. Figure
2 illustrates this process schematically.
Figure 2: Transformation of a environment model in a
MASON-grid.
The environment model and the necessary object
descriptions for generating the environment objects
are seen at the top of the figure. The environment
model is here represented once by the data struc-
ture (middle) and once by the visualization which
was generated by the modelling system (left). The
numbers on the objects are used to associate visu-
alization and data structure and correspond to the
unique identifiers. The transformation of the model
into a MASON-Grid is made by the functions of the
EnvEdit library. These functions scan the tree of the
environment objects and assigns each field in the grid
to an grid object which corresponds to the environ-
ment object type (bottom left, the colors correspond
to the used grid-class). The order of the environ-
ment objects is preserved. The environment objects
which were obscured by overlying objects have no
influence on the Grid. Grid objects are instances of
the grid-classes that implement the major functions of
the environment objects which are mapped in the en-
vironment model. The created grid objects maintain
a reference to the environment objects which produce
them (represented by the numbers), and can thus ac-
cess all registered property values.
The environment objects created in the modelling-
system must be mapped onto the grid to be used
as agents by the simulation system. In the model,
two environment objects of different types are distin-
guished by their different set of properties and by the
object description which created them. But from the
programming point of view they are two instances of
the same class. In the modelling system this is in-
tended and causes no problems. In the simulation sys-
tem, the various objects in the simulation have differ-
ent properties and different functions. Should a single
grid-class be used for all the environment objects ac-
cording to the procedure in the modelling-system this
class must have all the features of all existing envi-
ronment object types included. This single grid-class
would have to be adapted to any model that includes
EnvEdit - A GRAPHICAL ENVIRONMENT EDITOR - Approaches towards a Fast and Simple Way of Building Complex
Environments in Multi Agent Simulations
307

a new set of environment object types. There is there-
fore little point in bringing the environment objects
directly on the MASON-Grid. Instead, environment
objects with different types should produce different
grid objects. To facilitate this, each environment ob-
ject type of the model is assigned a class in the sim-
ulation system. As described, the object description
provides an entry for the class of the type in the simu-
lation system. This property of an environment object
type is used during conversion to instantiate an appro-
priate grid-object and for position it in the grid.
The environment model is, as described, designed
as a tree whose root is the EnvEditModel-object. The
different environment objects are stored as BaseOb-
ject instances and form the nodes and leaves of the
tree. Important in this arrangement, except the depth
of the environment objects in the tree, is the sequence
of individual children of a node. Both factors, depth
and order are crucial in order to understand the ar-
rangement of the environment objects in three dimen-
sions. Nodes which are located deeper in the tree
hide all their direct predecessor. Sibling nodes and
their children form subtrees. Their order in the com-
mon parent node is interpreted as follows: subtrees
which are placed further back (added later) hide sub-
trees which are located further forward.
During the transformation of the environment
model into a MASON-Grid, the just described tree of
objects is traversed by a depth-first search. If a node
has several sibling nodes the search begins with the
most recently added.
Position and dimensions of the environment ob-
ject are projected onto the grid, and the fields covered
by it are traversed gradually. If there is already a grid
object on a field, it will be skipped and proceed to
the next. If the field is still vacant, the class property
of the environment object is read, and an instance of
the specific grid-object-class is created and attached
to the field. In this way maximum flexibility in the
development of the simulation system is provided.
For instantiation of grid-objects a mechanism of
the Java programming language is used which is in-
ter alia called Dynamic Class Instantiation. The re-
quired classes must be designed by the developers of
the simulation system in cooperation with the devel-
opers of the environment models, since these are di-
rectly related to the object descriptions used in the
modelling. Object descriptions define the data which
an environment object contains, the grid-classes de-
fine the functions of the corresponding program ob-
jects in the simulation. The dynamic class instanti-
ation is used to create a program usable class out of
the string containing the class property of the environ-
ment objects. The so-used classes must have a com-
mon parent class, so they can be used by the program-
ming language in this way. In the case of EnvEdit, this
is the BaseGridOb ject.
The class BaseGridObject defines the basic func-
tions of all grid classes. These functions can access
the system properties like the x- and y-coordinates,
the height and width and the type of the underlying
environment object directly. All other properties can
be accessed through the underlying environment ob-
ject.
6 CONCLUSIONS AND FUTURE
WORK
EnvEdit is a flexible tool for the design of two dimen-
sional environment models for MASON. The flexible
type system allows it to respond to as yet unknown
requirements, and to map new environment objects.
EnvEdit allows a clear separation of the model data
from the simulation system, and facilitates the devel-
opment of different environment models. The opera-
tion of the software system has been kept simple. The
environment data is transferred into objects which are
usable for the simulation.
In the future we want to allow the creation of so-
called graphs (which describe, for example, road net-
works) directly in the environment model.
Another possible future work is the use of EnvEdit
for the design of environments for different frame-
works than MASON. The flexible type system and the
internal model could make it possible to easily adopt
the integration into the MASON framework for other
MAS-libraries.
REFERENCES
Balan, G. C., Cioffi-Revilla, C., Luke, S., Panait, L., and
Paus, S. (2003). Mason: A java multi-agent simula-
tion library. In Proceedings of the Agent 2003 Confer-
ence.
Beth, C., Kamenik, J., Ommen, D., and Hahn, A. (2009).
Design aspects of cognitive logistic systems. In 2nd
International Conference on Dynamics in Logistics.
Luke, S., Cioffi-Revilla, C., Panait, L., Sullivan, K., and
Balan, G. (2005). Mason: A multiagent simulation
environment. Simulation, 81:517–527.
Ommen, D., Beth, C., Kamenik, J., and Hahn, A. (2009). A
system-architecture for robotic movements of goods -
approaches towards a cognitive material flow system.
In ICINCO-RA, pages 342–347.
Ommen, D., Kamenik, J., Beth, C., Busch, J. C., Kulas,
A., Cramer, E., and Hahn, A. (2010). An adaptable
architecture for intelligent conveyors. In ICINCO (1),
pages 249–254.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
308
