
TOWARD A GOAL-BASED MISSION PLANNING CAPABILITY
Using PDDL Based Automated Planners
John Bookless and Glenn Callow
BAE Systems, Advanced Technology Centre, Bristol, U.K.
Keywords: Automated Planning, Distributed Task Assignment, PDDL.
Abstract: This paper proposes a generic goal-based mission planning framework which provides an integration
environment to support evaluation of existing planning and task assignment technologies. The framework
facilitates planning across a team of heterogeneous assets with a distributed capability for generating plans
to collaboratively achieve goals. A human operator assigns a team with a top-level goal which the
framework then decomposes into a list of tasks that can either be tackled by an individual asset or
collectively by a sub-team of assets with the appropriate capabilities. Each asset can generate individual
plans with knowledge of the current world state and a goal state. A selection of candidate planners are
investigated using the framework including a Hierarchical Task Network (HTN) Planner for goal
decomposition and a Partial Ordered PDDL (Planning Domain Definition Language) Planner for action-
based plan generation. The developed framework is applied to a search-and-rescue scenario requiring a team
of UAVs (Unmanned Aerial Vehicle) to search a specified area of operation.
1 INTRODUCTION
Successful planning for large scale missions can be a
difficult process requiring good understanding of the
overall mission objectives, knowledge of the
capabilities of available assets and ability to update
the top-level plan as new information becomes
available. Converting the top-level plan into a list of
tasks which are then assigned to individual assets,
both manned and unmanned, represents a significant
proportion of the effort in the planning problem.
Development of a goal-based mission planning
framework aims to automate part of that process
making it easier for operators to manage a team of
assets. The planning solution supports the following
features:
Handling planning within ad-hoc teams of
assets which dynamically change over time
No central point of failure within the system
Decentralised task allocation and mission
planning
Changes to state requiring regular re-planning
A search and rescue problem involving a team of
simulated UAV assets has been defined to evaluate
the mission planning framework. This scenario has
similarities with the open vehicle routing problem
(Li, Golden and Wasil, 2007), and the travelling
salesman problem. At each location in the search
area a number of tasks may be required to be
executed depending on whether a survivor has been
found or if the location has previously been
searched.
2 PLANNING FRAMEWORK
A generic mission planning framework has been
proposed, with the key components illustrated in
Figure 1. An instance of this framework will run
independently onboard every asset in a team. The
components are responsible for the following:
Task Manager: Maintains a task-stack and is
responsible for requesting the next task from the list
when the current task has been completed.
Coordinator: A central module which supports
interfacing between other modules in the framework.
Goal Decomposition Module: Interfaces to an
underlying HTN planner which decomposes top-
level goals into manageable tasks.
Task Assignment Module: Computes the next
available task to be completed by the asset based on
a team utility value.
Automated Planner Module: Interfaces to an
underlying PDDL planner which computes a list of
actions given an initial state and a goal state.
481
Bookless J. and Callow G..
TOWARD A GOAL-BASED MISSION PLANNING CAPABILITY - Using PDDL Based Automated Planners.
DOI: 10.5220/0003718104810484
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 481-484
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
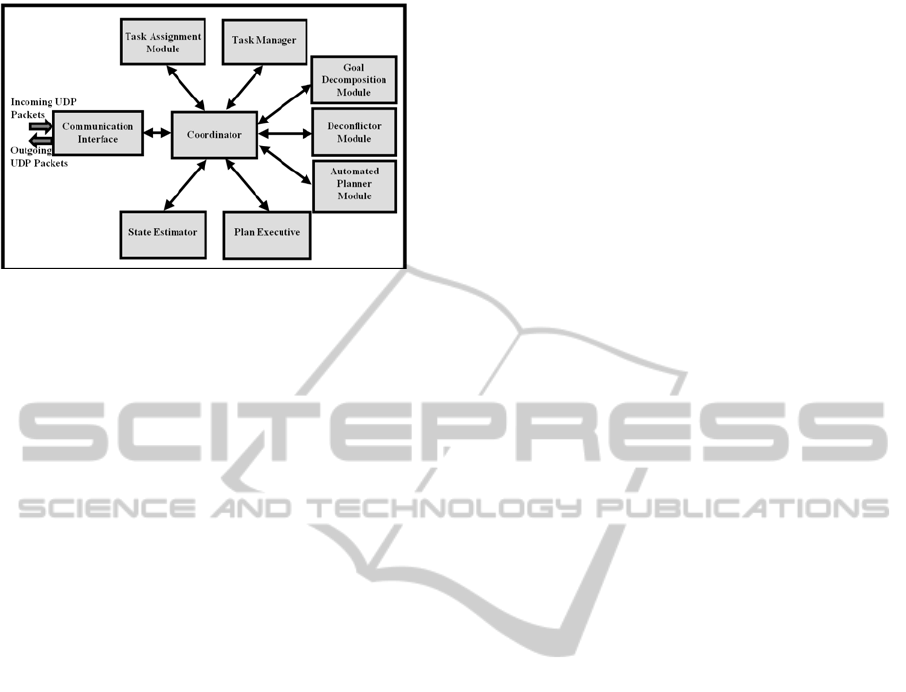
Figure 1: Goal-based planning framework.
State Estimator: Stores current world-state
information for assets in a team.
Deconflictor Module: Stores future world-state
information determined by assets sharing plan steps
and used to detect potential location/resource
conflicts in generated plans.
Plan Executive: Responsible for executing
deconflicted plans generated by the Automated
planner module. Also provides a low-level collision
avoidance mechanism to protect against
deconfliction errors.
Communication Module: Supports UDP
communication of state information and decisions
between assets
The modular nature of the framework supports
stand-alone implementation of the outlined
components with a common interface defined
between modules to facilitate easy integration. One
novel aspect of the planning framework is the
integration of a PDDL based planner, normally
applied to deterministic, offline planning problems
such as those set at the biennial International
Planning Competition (Long et al, 2000). This
technology supports on-the-fly goal-based planning
and re-planning to complete assigned tasks. This is
in contrast to developing a multi-agent framework
based on the BDI (Belief, Desire & Intent) paradigm
which commonly utilise pre-compiled plan fragment
libraries to construct plans (Bellifemine, Poggi and
Rimassa, 1999; Howden et al, 2001; d’Iverno et al,
2004).
The Goal Decomposition module uses the
JSHOP2 HTN planner to determine the required
tasks to complete an assigned goal. The Task
Assignment module applies a brute-force method,
but future research will consider integrating auction-
based approaches such as CBBA (Brunet, Choi and
How, 2009), or meta-heuristic approaches such as
simulated annealing (Osman, 1993). Plan
deconfliction currently assigns priorities based on
the assigned task, but future work will consider
spatial and temporal deconfliction to locally repair
plans and resolve conflicts.
3 SCENARIO
A Search-and-Rescue scenario has been defined to
provide a test case for the prototype framework. This
is based on a team of helicopter UAVs which can be
tasked with searching for survivors in an area of
operation, perhaps following the occurrence of a
natural disaster. The problem was simplified by
considering only four possible moves for each UAV
- north, south, east and west. A turning circle was
modelled in the problem such that a vehicle could
not directly move in the opposite direction to which
it is facing. Additionally, it was assumed that once a
survivor was identified, they would remain fixed at
that location.
To tailor the framework to handle the scenario
required a set of tasks and their relationship to top-
level goals to be represented as a HTN domain, and
the set of low-level actions and their relationships to
tasks to be represented as a PDDL domain. The
output list from the Goal decomposition module will
be composed of a combination of the low-level tasks
which are required to achieve the assigned top-level
goal. The output plan from the Automated Planner
module will be composed of a list of the low-level
actions which achieve the assigned task.
The following processes are performed whenever
the distributed team is assigned a new top-level goal:
1) A Top-level goal is assigned to all team
members
2) Each team member decomposes the goal into
a list of sub-tasks which are stored in a task
stack
3) The Task Assignment module is invoked to
select the next task from the stack which the
asset can complete
4) If a plan is required, the Automated Planner
module generates a problem definition file
and the PDDL planner is invoked
5) The output plan is checked for potential
conflicts by the Deconflictor module and the
plan steps are shared with other assets via the
Communication Interface. If conflicts exist a
replan may be required
6) Once conflicts have been resolved, the plan is
passed to the Plan Executive which executes
the actions
Steps 3-6 are repeated until the task stack is empty.
Updates to the state data which may require
ICAART 2012 - International Conference on Agents and Artificial Intelligence
482

additional tasks will result in Step 2 being executed
again to update the task stack (such as discovery of a
survivor). If a new goal is assigned to the team then
Steps 1 and 2 are repeated.
4 COMPARISON BETWEEN
PDDL PLANNERS
To demonstrate how the framework can be used to
evaluate planning technology, some candidate
planners were selected for comparison. Due to the
modular architecture of the developed framework, it
is easy to switch between planners. This is an
advantage of using the generic PDDL planning
language to express the scenario (Fox and Long,
2003). The performance of two candidate PDDL
planners were compared – POPF and SGPlan.
The POPF planner was selected following
collaboration with SciSys UK Ltd and the
Strathclyde University Automated Planning group
(Coles, Coles, Fox and Long, 2010). SGPlan was
selected as an alternate planner as it was a winner in
the Deterministic Planning track of the 2006
International Planning Competition (Hsu and Wah,
2008).
A mission scenario was defined where 6 assets
with sensor capability are tasked with searching an
area with no hidden survivors. However a range of
search area sizes were tested varying from a 5x5 to
an 8x8 grid. Results for the number of required team
moves and plan generation times were recorded
using both the SGPlan and POPF planners.
Figure 2 demonstrates a comparison of the plan
generation times between the two planners executed
on a 2.2GHz processor. For the 5x5 case POPF and
SGPlan have comparable times, 0.58 secs and 2.5
secs respectively. However, the POPF planner takes
a lot longer to generate a valid plan in the 8x8 case,
78.6 secs compared with 3.7 secs for SGPlan.
Comparison of Planner: Plan Generation Time
0.58
1.42
3
3.7
2.5
19.4
39.8
78.6
0
10
20
30
40
50
60
70
80
90
5x5 6x6 7x7 8x8
Search Area Sizes
Plan Generation Time (secs)
SGPLAN
POPF
Figure 2: Plan generation time.
Comparison of Planners: Number of Moves
36
56
74
91
28
43
61
74
0
10
20
30
40
50
60
70
80
90
100
5x5 6x6 7x7 8x8
Search Area Sizes
Number of Team Moves
SGPLAN
POPF
Figure 3: Number of team moves.
Figure 3 shows that the required number of plan
moves produced by POPF is better than that
produced by SGPlan. In the 8x8 case, SGPlan
requires 91 moves to complete the search where as
POPF requires 74 moves. This was found to be due
to a number of inefficient steps in the plan produced
by SGPlan whereby assets would transition over
unsearched grid locations and not perform a search
operation, requiring an asset to return later in the
plan. The observed performance difference between
the planners is comparable to those highlighted by
the Strathclyde Automated Planning Group (Coles,
Long and Rendell, 2010).
Although both planners found valid solutions in
all cases, platform utilisation in the plans generated
by SGPlan was not evenly distributed across the
team, compared with the results produced by POPF.
For the case of an 8x8 search area, Figure 4 and
Figure 5 demonstrates the area search coverage for
each asset executing plans produced by SGPlan and
POPF respectively. Most of the search actions in the
plan produced by SGPlan are performed by UAV5
and it can be seen that UAV1, 2 and 3 only search
the squares they initially occupy with no further
movement. Not visible in Figure 4, there are also a
number of unnecessary moves in the generated plan
whereby an asset does not perform a search as it
passes over an unsearched location, requiring a
transition back to that location later in the plan.
The results for the POPF planner, illustrated in
Figure 5, demonstrate improved asset utilisation. The
number of moves performed per asset varies
between 11 and 14 in this case. The generated plan
is not optimal but significantly improves upon the
number of unnecessary moves observed with
SGPlan.
This highlights that there is a trade-off between
the solutions produced by the two planners. SGPlan
can generate a valid plan quicker than POPF and
was found to be able to handle slightly larger search
areas. However, this is at the expense of plan quality
TOWARD A GOAL-BASED MISSION PLANNING CAPABILITY - Using PDDL Based Automated Planners
483
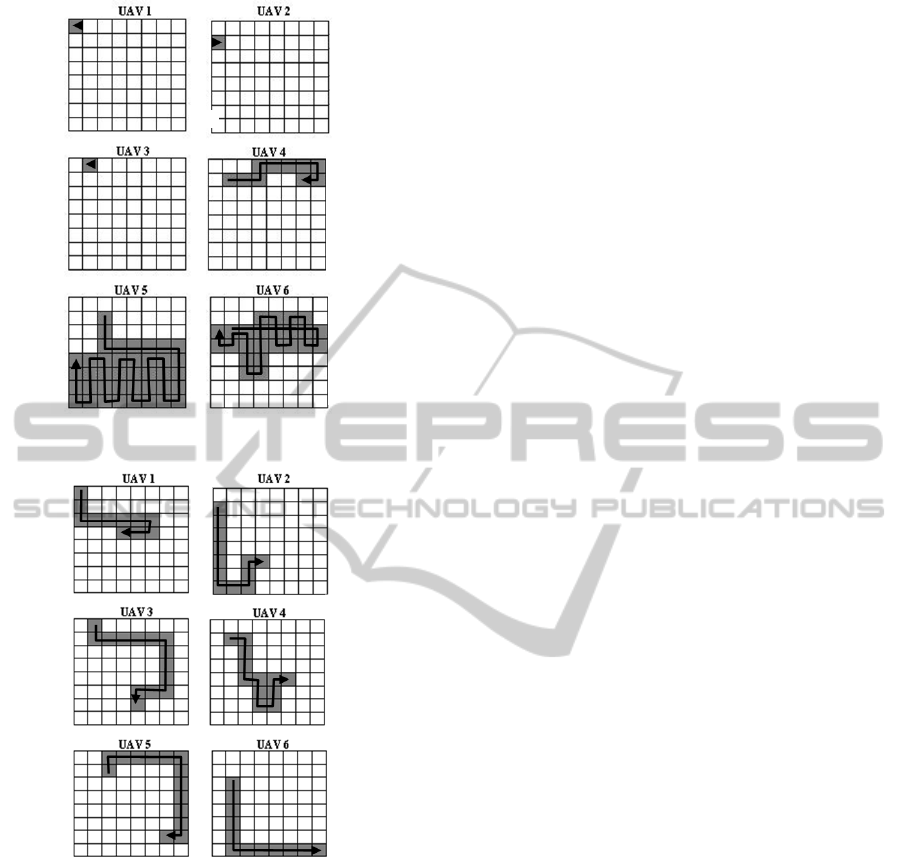
Figure 4: Asset coverage for SGPlan software.
Figure 5: Asset coverage for POPF software.
for this particular scenario where asset utilisation is
not evenly distributed and there are a number of
inefficient steps inserted in the plans. These are the
factors which should be considered when selecting
an appropriate planning solution.
5 CONCLUSIONS
Tailoring the prototype framework to a simple
Search-and-Rescue scenario has enabled a proof-of-
concept evaluation to be performed. This has
demonstrated that it is feasible to construct a
decentralised mission planning system which is
capable of performing goal-decomposition, task
allocation, automated planning and plan
deconfliction.
The framework’s modular architecture facilitates
integration of algorithms such that it could be used
as a test-bed to evaluate and compare planning
technology. Future work will consider the following
framework updates:
- Updates to the interface between the framework
and the automated planners to support scalability
to larger search spaces
- Handling of dynamic environments investigating
extensions to PDDL, such as PDDL+ which
enables modelling of external events and
processes (Fox and Long, 2002)
REFERENCES
Li, F., Golden, B. L., Wasil, E. A., 2007. The open vehicle
routing problem: Algorithms, large-scale test
problems, and computational results, Computers &
OR, 34(10): 2918–2930.
Long, D., et al, 2000. The AIPS-98 Planning Competition,
Artificial Intelligence Magazine, 21(2).
Bellifemine, F., Poggi, A., Rimassa, G., 1999. JADE-A
FIPA-compliant agent framework, Proceedings of
PAAM, 97-108.
Howden, N. et al, 2001. JACK intelligent agents-summary
of an agent infrastructure, 5
th
International Conference
on Autonomous Agents.
d’Iverno, M. et al, 2004. The DMars Architecture: A
specification of the distributed multi-agent reasoning
system, Autonomous Agents and Multi-Agent
Systems, 9: 5-53.
Fox, M., Long, D., 2003. PDDL2.1: An extension to
PDDL for expressing temporal planning domains,
Journal of Artificial Intelligence Research, 20: 61–
124.
Coles, A. J., Coles, A. I., Fox, M., Long, D., 2010.
Forward-Chaining Partial-Order Planning,
Proceedings of ICAPS-10.
Hsu, C. W., Wah, B. W., 2008. The SGPlan planning
system in IPC-6, Artificial Intelligence.
Brunet, L., Choi, H. L., How, J., 2009. Consensus-based
auction approaches for decentralised task assignment,
In AIAA Guidance, Navigation and Control
Conference and Exhibit.
Osman, I., 1993. Metastrategy simulated annealing and
tabu search algorithms for the vehicle routing
problem, Annals of Operations Research, 41: 421-451.
Coles, A. I., Long, D., Rendell, P., 2010. Experiences with
Temporal Planning, Proceedings of the Workshop of
the UK Planning and Scheduling Special Interest
Group
Fox, M., Long, D., 2002. PDDL+: Modelling continuous
time dependent effects, Proceedings of the 3rd
International NASA Workshop on Planning and
Scheduling for Space.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
484
