
COOPERATIVE MULTI-ROBOT SYSTEM FOR INFRASTRUCTURE
SECURITY TASKS
Erik Hernandez, Antonio Barrientos, Claudio Rossi and Jaime del Cerro
Center for Robotics and Automation, Technical University of Madrid, C/ Jos´e Gutierrez Abascal 2, Madrid, Spain
Keywords:
Reinforcement learning, Robotics security, Infrastructure security tasks, Multi-robot systems.
Abstract:
As a result of terrorist attacks in the last years, new efforts have raised trying to solve challenges related to se-
curity task automation using robotic platforms. In this paper we present the results of a cooperative multi-robot
approach for infrastructure security applications at critical facilities. We formulate our problem using a Ms.
Pac-Mac like environment. In this implementation, multiple robotic agents define policies with the objective to
increase the number of explored states in a grid world. This is through the application of the off-policy learning
algorithm from reinforcement learning area, known as Q-learning. We validate experimentally our approach
with a group of agents learning a patrol task and we present results obtained in simulated environments.
1 INTRODUCTION
Recently, terrorist attacks around the world have
showed environments vulnerability. As a result of
these events new efforts have arisen in research to
try to solve challenges related with security tasks
automation. Robotics Security is a consequence of
this research interest in security systems using mo-
bile robots. Actually, “intelligent” buildings security
depend upon Closed Circuit TeleVision for informa-
tion gathering to identify anomalous behaviors. How-
ever, these solutions are inflexible and human limi-
tations such as boredom, distraction or fatigue affect
their performance, moreover, in some environments
people must deal with dangerous conditions. There-
fore, it is important to improve security elements uti-
lized in these systems. Mobile robots characteristics
make it suitable for this purpose. There are numer-
ous advantages using mobile robots, i.e., it does not
experiment human limitations. However, some tasks
are too complex that a single robot cannot achieve
good results. To overcome these challenges we can
use Multi-Robot Systems which are defined as a set
of homogeneous or heterogeneous robots interacting
in the same environment using cooperative behaviors
(Everett, 2003), (Oates et al., 2009), (Luo and Lin,
2009), (Roman-Ballesteros, 2006).
In this paper we present a collaborative multi-
robot approach for infrastructure security applications
at critical facilities such as nuclear power plants, ur-
ban transport installations and so forth. We have for-
mulated our problem using a Ms. Pac-Mac like en-
vironment in which multiple agents define policies to
explore states in a grid world, this adaptation differs
to other works trying to solve multi-robot patrolling
tasks (Chevaleyre, 2004), (Elmaliach et al., 2007). To
solve this problem we haveimplemented an algorithm
from reinforcement learning known as Q-learning.
Reinforcement Learning yields machine learning sys-
tems which appeals to many researchers due to its
generality. In these systems an agent learns how to
achieve a goal by trial-and-error interactions with its
environment. Our approach is different to numerous
implementations on grid worlds of Q-learning works,
mainly in the objective and in the way in this objec-
tive is reached. The rest of this paper is organized as
follows. Section 2 introduces the problem. Section
3 shows the methodology implemented to solve the
learning task. Section 4 gives the experimental result
and their evaluation. Finally, section 5 concludes the
paper.
2 PROBLEM DESCRIPTION
We have adapted Ms. Pac-Man game to represent in-
frastructure environments. Namely, in this game a hu-
man steers Ms. Pac-Man throughout a maze to eat
dots while avoid getting caught by four ghosts. De-
spite our approach is based on this game, we have
removed much of its complexity. First, we shape the
313
Hernandez E., Barrientos A., Rossi C. and del Cerro J..
COOPERATIVE MULTI-ROBOT SYSTEM FOR INFRASTRUCTURE SECURITY TASKS.
DOI: 10.5220/0003721403130316
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 313-316
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

maze structure into an infrastructure environment as
a grid world with a set of paths where each cell rep-
resents a state. Characteristics such as corridors, T-
junctions, interjections and L-turns remain. At each
step time an agent perceives a state and selects one of
four actions: North, West, South or East. That brings
it to the next state. According to the orientation in
which each agent reaches a state it has four possible
actions to select. Second, we consider the dots dis-
tributed around the environment. The agents must eat
all dots with fixed and variable values to begins a new
episode. Finally, multiple agents that represent the
ghosts are the last adaptation of the game.
The tasks that each agent can perform are: pa-
trol, homing and avoiding. Patrol causes the agent
to move throughout the environment following a path
by taking decision to choose actions. Homing causes
the agent to be resting to charge batteries energy. Fi-
nally, Avoiding causes the agent to avoid obstacles or
other robots. Each agent switches its internal task
between Patrol and Homing considering battery life
value. Therefore, the learning task consist of find-
ing a mapping from states to actions for cooperative
patrol where each agent learns how to select the ac-
tion with the highest value. Each agent implements a
set of adaptation rules. Individually each agent has a
map, whereas from a group perspective, the rules are
triggered by pheromone like communication among
robots, so that each time step they inform others the
state explored (Khamis et al., 2006).
3 REINFORCEMENT LEARNING
A reinforcement learning model consist of a discrete
set of environment states, S; a discrete set of actions,
A; and a set of scalar reinforcement signal. In this
model, an agent learns a mapping from situations to
actions by trial-and-error interactions with the envi-
ronment to achieve a goal. This environment must be
at least partially observable. At each time step t ∈ T
each agent receives a current state indication s
t
∈ S of
the environment, then it chooses an action a
t
∈ A to
generate an output which changes the state of the en-
vironment to s
t+1
∈ S and the value of this state tran-
sition is indicated to the agent through an scalar r
t
known as reward (Sutton and Barto, 1998). A reward
defines the goal in a reinforcement learning problem.
It maps each perceived state or state-action pair to a
single numerical value that indicates the intrinsic de-
sirability of that state. An important reward property
is known as Markov Property. A reward with this
property must include immediate sensation and re-
tain all relevant information from the past (Puterman,
1994). Thus, the agent learns to perform actions that
maximize the sum of the rewards received when start-
ing from some initial state and proceeding to a ter-
minal one. The reward function must be necessarily
unalterable by the agent and it only serves as a basic
for altering a policy π. In this implementation mainly
dots values have been used as reward. A policy is a
mapping from each state, s ∈ S, and action, a ∈ A(s),
to the probability π(s, a) of taking action a when in
state s. An stationary policy, π : S → Π(A) defines a
probability distribution over actions. A policy is the
core of the agent since it defines which action must
be performed at each state. Thus, the objective of re-
inforcement learning is to develop a agent with a be-
havior policy to choose actions that tend to increase
the long-run sum of values of the reward.
We have implemented an off-policy temporal dif-
ference algorithm known as Q-learning which learns
directly from raw experience without a model of the
environment and updates estimations based in part
on other learned estimations without waiting for a
final outcome. A model consist of the state transi-
tion probability function T(s, a, s
′
) and the reinforce-
ment function R(s, a). However, reinforcement learn-
ing is concerned with how to obtain an optimal policy
when such a model is not know in advanced (Watkins
and Dayan, 1992). The objective of Q-learning is
to learn the action-value function Q applying the
rule Q(s
t
, a
t
) ← Q(s
t
, a
t
) + α[r + γmax
a
Q(s
t+1
, a) −
Q(s
t
, a
t
)], where < s
t
, a
t
, r, s
t+1
> is an experience tu-
ple. If each action is executed in each state an infinite
number of times on an infinite time run and α is de-
cayed appropriately, the Qvalues will converge with
probability 1 to their optimal values Q
∗
(Kaelbling
et al., 1996). An action-value function for policy π
defines the value of taking action a in state s under
policy π, denoted by Q
π
(s, a), as the expected reward
starting from s, taking action a,and thereafter follow-
ing policy π.
The general form of the Q-learning algorithm
consist of nine step, as describe below.
1 Initialize Q(s,a) arbitrarily
2 Repeat (for each episode):
3 Initialize s
4 Repeat (for each step of episode):
5 Choose a from s using policy derived from Q
6 Take action a, observe r, s’
7 Apply equation X
8 s <- s’
9 Until s is terminal
In this implementation an episode terminates when
all dots are eaten and each step of episode consist of
choosing an action a when in state s, updates Q(s, a)
and go to s
′
.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
314
4 EXPERIMENTS AND RESULT
7 8 9 10
11 12 13
6
20
27
34
41
48
55
61
5453525150
43
36
29
22
23
24
25
32
3938
28 29 30 31 32 33 34
27
20
13
6
41
48
55
61
Map A Map B
Figure 1: Maps Utilized in Our Implementation.
We have used the maps depicted in figure 1 to de-
scribe important aspects of our approach.
0 10 20 30 40 50 60 70 80 90 100
-50
0
50
100
150
200
250
300
350
400
450
West and East Q Values
Steps
East = 1 West = 1 East = 10 West = 10 East = 100 West = 100 East = 1000 West = 1000
0 5 10 15 20
0
10
20
30
40
50
60
70
80
90
Detail at (10 ,47.5)
85 86 87 88 89 90 91 92 93 94 95
23.5
24
24.5
25
Detail at (90 ,24.2)
80 82 84 86 88 90 92 94 96 98 100
6
6.2
6.4
6.6
Detail at (90 ,6.3)
80 82 84 86 88 90 92 94 96 98 100
4.45
4.5
4.55
4.6
Detail at (90 ,4.525)
80 82 84 86 88 90 92 94 96 98 100
1
2
3
4
Detail at (90 ,2.5)
Figure 2: Evolution of West and East Qvalues in State 34
T-junction of Map B with four Different Initial Values.
To initialize the QValues we select values so that
north is chosen the first time a state is explored, then
west or east if north has been selected and south as the
last option. Since the algorithm performance changes
with the multiplier of initial values, we have executed
experiments with four multipliers 1x, 10x, 100x and
1000x. Figure 2 shows the first 100 steps of the al-
gorithm in state 34 of map B. As it can be seen in
the details, the multiplier affects the frequency of the
selection of west or east actions. The bigger the fre-
quency, the better the performance of the algorithm.
Nevertheless, when a different action is selected ev-
ery step, the performance decreases. Based on this
results we have selected the multiplier 100x.
To calculate the value of γ we have executed ex-
periments of one episode with values from 0.1 to
0.9 and increments of 0.1 using map A. The results
show that the average of γ = 0.9 gets the shortest
path, however, it performs a high exploration in the
first episode, in contrast with γ = 0.1 in which explo-
rations take a number of steps similar to the short-
est path. Based on these results, we have selected
γ = 0.1 which indicates that the agents are concerned
with maximizing immediate rewards.
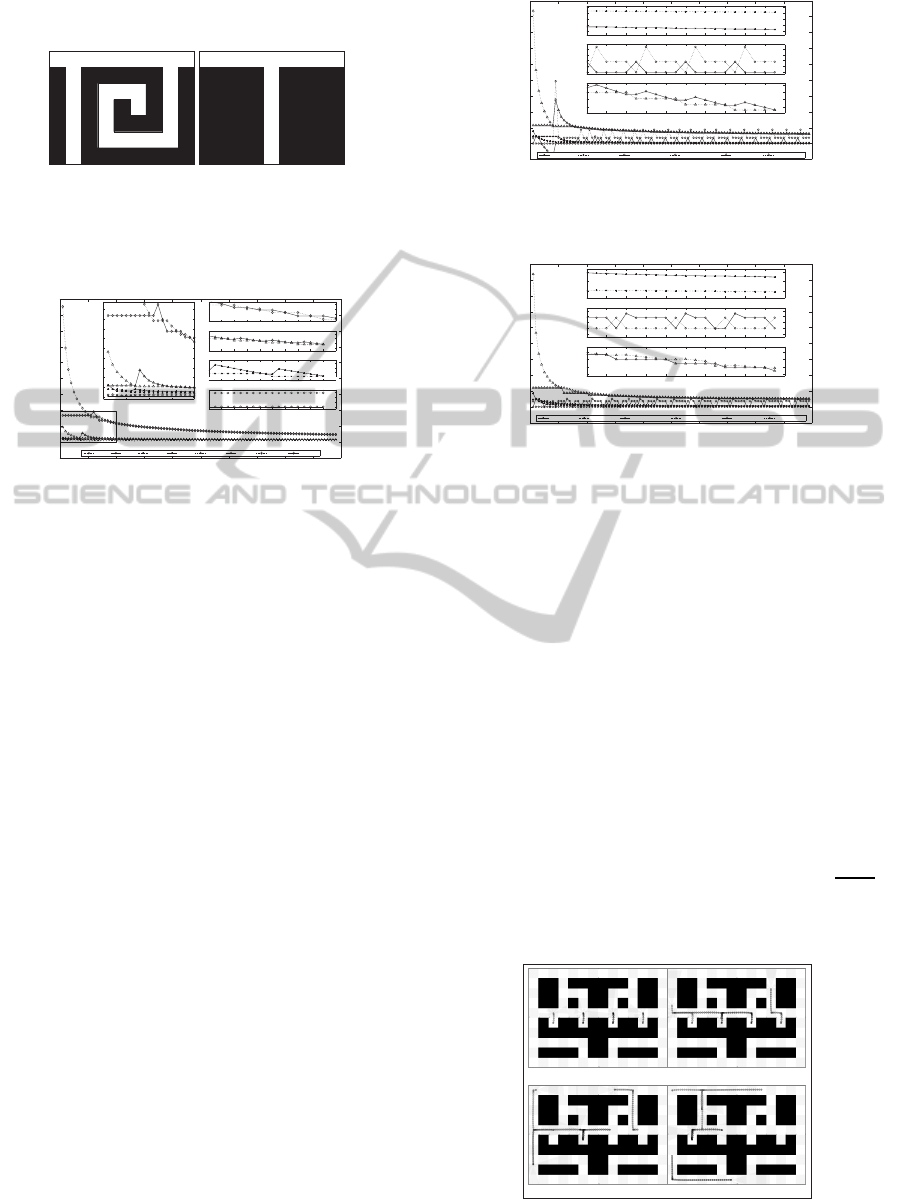
Taking this indication into account, figures 3 and
4 show the evolution of the reward, γmax
a
Q(s
t+1
, a)
and Qvalues for west and east options in states 13 and
34 of map A and B, respectively. Both states are T-
junctions, however, when each state is reached with
east orientation, the number of next states for each
one is different, i.e., 1 in west direction and 22 in east
0 10 20 30 40 50 60 70 80 90 100
-10
0
10
20
30
40
50
60
70
80
90
Reward, MaxQ and Q values
Steps
MaxQ of State 6 MaxQ of State 20 Reward for East Option Reward for West Option Q for West Option Q for East Option
80 82 84 86 88 90 92 94 96 98 100
0.2
0.3
0.4
0.5
0.6
Detail at (90 ,0.38)
80 82 84 86 88 90 92 94 96 98 100
0
2
4
6
8
Detail at (90 ,4.5)
80 82 84 86 88 90 92 94 96 98 100
6.2
6.3
6.4
6.5
Detail at (90 ,6.32)
Figure 3: First 100 Steps of the Evolution of r,
γmax
a
Q(s
t+1
, a) and Qvalues in State 13 T-junction of
Map A.
0 10 20 30 40 50 60 70 80 90 100
-10
0
10
20
30
40
50
60
70
80
90
Reward, MaxQ and Q values
Steps
MaxQ of State 27 MaxQ of State 41 Reward for East Option Reward for West Option Q for West Option Q for East Option
80 82 84 86 88 90 92 94 96 98 100
0.5
0.6
0.7
Detail at (90 ,0.38)
80 82 84 86 88 90 92 94 96 98 100
-2
0
2
4
6
Detail at (90 ,4.5)
80 82 84 86 88 90 92 94 96 98 100
5
5.1
5.2
5.3
Detail at (90 ,6.32)
Figure 4: First 100 Steps of the Evolution of r,
γmax
a
Q(s
t+1
, a) and Qvalues in State 34 T-junction of
Map B.
direction for state 13 of map A and 4 in both direc-
tions for state 34 of map B. As can be seen in the
details of γmax
a
Q(s
t+1
, a), in figures 3 and 4, despite
that the number of next states of each state is not the
same, the difference does not affect proportionally the
values of γmax
a
Q(s
t+1
, a). This is a consequence of
γ value, the only appreciable difference is the reward
that every 5 steps the agent receives when it explores
state 13 in these conditions.
The value of the shaped reinforcement signal r
used in our approach is the result of the expression
r = dot(s
′
) + incrementalDot(s
′
) + λ, where λ is the
relation between the number of eaten dots and the
number of explored states. Finally, the value of the
learning rate α that we have used in all experiments
in this work is subject to the rule, α(Q(s,a)) =
1
N(s,a)
,
where N(s, a) is the number of times that the action a
has been selected when in state s.
A) First Stage of Patrol Route B) Second Stage of Patrol Route
C) Third Stage of Patrol Route D) Fourth Stage of Patrol Route
Figure 5: A Team of Four Khepera III Robots Patrolling.
COOPERATIVE MULTI-ROBOT SYSTEM FOR INFRASTRUCTURE SECURITY TASKS
315
Once we get a suitable performance with an agent,
we use a team of four agents with different initial po-
sition. Now each one must communicate to indicate
its current state and the next one, as a result of this
cooperation, each agent defines a policy that allows it
to patrol in different areas of the environment and de-
sign a special division of labor in which negotiation is
not needed.
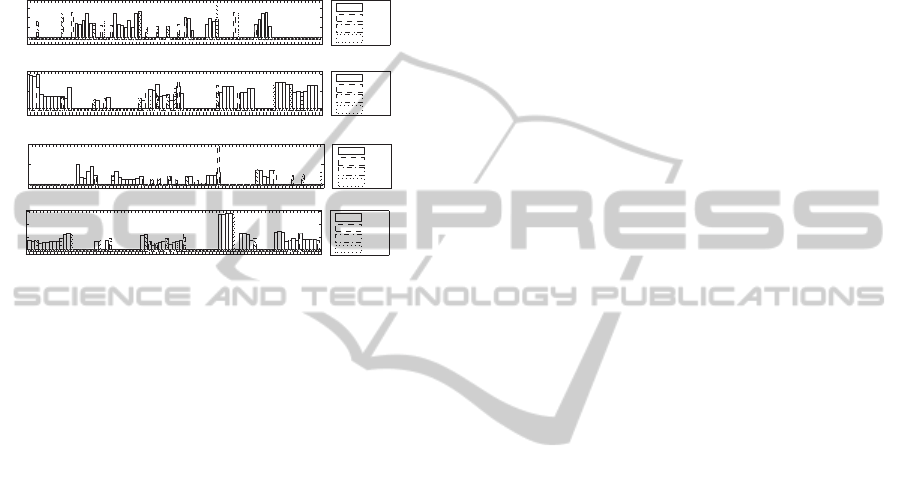
North Orientation
West Orientation
South Orientation
East Orientation
1 5 10 17 32 41 52 59 64 69 81 99 106 111 126 131 136139
0
10
20
30
States
Q Values
North
West
South
East
1 5 10 17 32 41 52 59 64 69 81 99 106 111 126 131 136139
0
5
10
15
North
West
South
East
Q Values
1 5 10 17 32 41 52 59 64 69 81 99 106 111 126 131 136139
0
10
20
North
West
South
East
Q Values
1 5 10 17 32 41 52 59 64 69 81 99 106 111 126 131 136139
0
20
40
North
West
South
East
Q Values
Figure 6: Behavior Policy of Agent A
0
.
Figure 6 shows the policy of one agent. As it can
be seen, almost all states are explored at least once,
however, after 2000 episodes, an agent defines a be-
havior with preference to patrol on the left upper area
of map. Due to the lack of space the policies of the
other agents are not showed, however the simulation
depicted in figure 5 shows the four agents patrolling
in the same environment. Even though the results we
have presented consider four agents, our approach is
not restricted to this number.
5 CONCLUSIONS
In this paper, we presented a cooperative multi-robot
approach for security applications at critical facilities
in which a team of agents define policies to patrol, us-
ing the algorithm of reinforcement learning known as
Q-leaning. The initial Qvalues that we selected, al-
low each agent to move in a suitable way instead of in
a random manner, as some works of multi-robot im-
plementations in multi-robot foraging or search and
rescue literature have proposed. Therefore, the agents
do not need to wait until a learning phase terminates
to patrol. It is worth noting that in Q-learning liter-
ature, almost all implementations in grid worlds de-
scribe solutions as undiscounted task in which the
goal positions are defined and agents receive delayed
reward. In contrast, in our approach we do not de-
fine goal positions but task goal. Indeed, as it can
be seen in section 4 a value near undiscounted fac-
tor does not work or its performance is worse than
the smallest value. Moreover, these implementations
seem to be off-line process instead of on-line as we
claim in our implementation. It is on-line due to the
fact that an agent can explore the environment mean-
while it finds its optimal behavior policy. Finally, we
validated our approach in a simulation environment to
show the ability of the method to define patrol paths.
ACKNOWLEDGEMENTS
This work has been supported by the Robotics and
Cybernetics Research Group at Technique Univer-
sity of Madrid (Spain), and funded under the projects
“ROTOS: Multi-Robot system for outdoor infrastruc-
tures protection”, sponsored by Spain Ministry of
Education and Science (DPI2010-17998), and the
project ROBOCITY 2030 Project, sponsored by the
Community of Madrid (S-0505/DPI/000235).
REFERENCES
Chevaleyre, Y. (2004). Theoretical analysis of the
multi-agent patrolling problem. In Intelligent
Agent Technology, 2004.(IAT 2004). Proceedings.
IEEE/WIC/ACM International Conference on, pages
302–308. IEEE.
Elmaliach, Y., Agmon, N., and Kaminka, G. (2007). Multi-
robot area patrol under frequency constraints. Annals
of Mathematics and Artificial Intelligence.
Everett, H. (2003). Robotic security systems. Instrumenta-
tion & Measurement Magazine, IEEE.
Kaelbling, L., Littman, M., and Moore, A. (1996). Re-
inforcement learning: A survey. Arxiv preprint
cs/9605103.
Khamis, A., Kamel, M., and Salichs, M. (2006). Coopera-
tion: concepts and general typology. In Systems, Man
and Cybernetics, 2006. SMC’06. IEEE International
Conference on, volume 2, pages 1499–1505. IEEE.
Luo, R. and Lin, T. (2009). Multisensor based security
robot system for intelligent building. Robotics and
Autonomous Systems.
Oates, R., Milford, M., and Wyeth, G. (2009). The im-
plementation of a novel, bio-inspired, robotic security
system. , 2009. ICRA'09.
Puterman, M. (1994). Markov decision processes: discrete
stochastic dynamic programming. John Wiley& Sons,
Inc.
Roman-Ballesteros, I. (2006). A framework for cooperative
multi-robot surveillance tasks. Robotics and Electron-
ics.
Sutton, R. and Barto, A. (1998). Reinforcement learning:
An introduction, volume 116. Cambridge Univ Press.
Watkins, C. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3):279–292.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
316
