
PERFORMANCE EVALUATION OF FEATURE DETECTION FOR
LOCAL OPTICAL FLOW TRACKING
Tobias Senst, Brigitte Unger, Ivo Keller and Thomas Sikora
Communication Systems Group, Technische Universit¨at Berlin, Einsteinufer 17, Berlin, Germany
Keywords:
Feature detector, Feature detection Performance evaluation, Tracking, KLT.
Abstract:
Due to its high computational efficiency the Kanade Lucas Tomasi feature tracker is still widely accepted and
a utilized method to compute sparse motion fields or trajectories in video sequences. This method is made up
of a Good Feature To Track feature detection and a pyramidal Lucas Kanade feature tracking algorithm. It is
well known that the Good Feature To Track takes into account the Aperture Problem, but it does not consider
the Generalized Aperture Problem. In this paper we want to provide an evaluation of a set of alternative
feature detection methods. These methods are taken from feature matching techniques like FAST, SIFT and
MSER. The evaluation is based on the Middlebury dataset and performed by using an improved pyramidal
Lucas Kanade method, called RLOF feature tracker. To compare the results of the feature detector and RLOF
pair, we propose a methodology based on accuracy, efficiency and covering measurements.
1 INTRODUCTION
Motion based analysis of a video sequence is an im-
portant topic in computer vision and visual surveil-
lance. The KLT feature tracker (Tomasi and Kanade,
1991) still remains as a widely accepted and utilized
method to compute sparsemotion fields or trajectories
in video sequences due to its high computational ef-
ficiency (Ali and Shah, 2007; Hu et al., 2008; Fradet
et al., 2009). The KLT tracker is based on a GFT
(Good Feature To Track) corner detector (Shi and
Tomasi., 1994) and the Lucas/Kanade local optical
flow method (Lucas and Kanade, 1981).
In the recent past several improvements of the Lu-
cas/Kanade method have been developed: Pyrami-
dal implementation (Bouguet, 2000) was proposed
to estimate large motions, parallelizing using the
GPU (Sinha et al., 2006) increases the runtime perfor-
mance drastically, gain adaptive modifications (Zach
et al., 2008) extend the robustness against varying il-
luminations and robust norms in association with a
adaptive region size (Senst et al., 2011) improve the
robustness against partial occlusion and non Gaussian
noise. Whilst the tracking by local optical flow has
been improved continually, the feature detecting is
still based on the GFT method. This leads to sev-
eral drawbacks. E.g. the GFT does not consider the
multi scale approach of the pyramidal Lucas/Kanade
implementation. Even the Lucas/Kanade local con-
stant motion constraint is not taken into account by
the GFT algorithm. In the recent decades feature de-
tectors were developed for feature matching methods,
e.g. SIFT (Scale Invariant Feature Transform) (Lowe,
1999), SURF (Speeded Up Robust Features) (Bay
et al., 2008) and MSER (Maximally Stable Extremal
Regions) (Matas et al., 2002). These techniques were
applied e.g. in stereo, SLAM (Simultaneous Local-
ization and Mapping) and image stitching applica-
tions.
In this paper, we investigate the usability of sev-
eral feature detectors related to local optical flow
tracking. The evaluation is based on the Middlebury
dataset (Baker et al., 2009). The dataset provides syn-
thetic and realistic pairs of consecutively captured im-
ages and the optical flow as ground truth for each
pair. We provide metrics for sparse motion estima-
tion. These metrics take into account the accuracy,
efficiency and the covering of the sparse motion field.
2 FEATURE DETECTION
In this section we briefly introducethe set of evaluated
feature detectors. Most of the detectors are designed
for feature matching, whose requirements differ from
the tracking with local optical flow. Feature matching
methods associate feature points of different images
by extracting descriptors from the detected feature lo-
303
Senst T., Unger B., Keller I. and Sikora T. (2012).
PERFORMANCE EVALUATION OF FEATURE DETECTION FOR LOCAL OPTICAL FLOW TRACKING.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 303-309
DOI: 10.5220/0003731103030309
Copyright
c
SciTePress

cation. Thus the features provide a limited set of well
localized and individually identifiable anchor points.
Important properties are repeatability and invariance
against rotation, translation and scaling (Tuytelaars
and Mikolajczyk, 2008).
The local optical flow estimates the feature motion
by a first order Taylor approximation of the bright-
ness constancy constraint equation of a specified re-
gion (Lucas and Kanade, 1981). Thus it depends on
the appearance of vertical and horizontal derivatives
of the image. This is known as the aperture problem.
In addition it constrains that the specified region con-
tains one moving pattern. This extends the aperture
problem to the generalized aperture problem (Senst
et al., 2011). As a consequence important properties
of the patterns close to the feature points detected by a
feature detector are cornerness and motion constancy.
Good Features to Track. The GFT method (Shi and
Tomasi., 1994) is designed to detect cornerness pat-
terns. The Gradient matrix G is computed for each
pixel as:
G =
∑
Ω
I
2
x
I
x
I
y
I
x
I
y
I
2
y
(1)
with the intensity values I(x,y) of a grayscaled im-
age and the spatial derivatives I
x
,I
y
for a specified
region Ω. The gradient matrix is implemented by
means of integral images for I
2
x
, I
2
y
and I
x
I
y
. Due to
the use of integral images the computational complex-
ity of the gradient matrix is constant and independent
of the size of Ω. A good feature can be identified
by the maxima of λ(x,y), the smallest eigenvalue of
G. Thus good features prevent the aperture problem.
Certainly strong corners appear at object boundaries,
where multiple motions are very likely. This leads to
the generalized aperture problem. Post processing is
applied by non-maximal suppression and thresholds
at q · max(λ(x,y)), with q the cornerness quality con-
stant.
Pyramidal Good Features to Track. The PGFT
method is the pyramidal extension of the GFT
method. The pyramidal implementation is done by
up-scaling the region Ω based on integral images.
That is more efficient than down-scaling the image.
For each scale the smallest eigenvalue λ
s
(x,y) of the
corresponding Gradient matrix is computed. A good
feature can be identified by the maxima of λ(x, y),
whereby:
λ(x,y) = max
s
(λ
s
(x,y)) (2)
is the maximal eigenvalue of each scale.
Feature from Accelerated Segment Test. The
FAST (Rosten and Drummond, 2006) method is de-
signed as runtime efficient corner detector. Corners
are assumed at positions with not self-similar patches.
This is measured by considering a circle, where I
C
is the intensity from the centre of the circle and I
P
and I
P
′
are the intensity values on the diameter line
through the center and at the circle, hence at opposite
positions. Thus a patch is not self-similar if pixels at
the circle look different from the centre. The filter re-
sponse is performed on a Bresenham circle and given
by:
C = min
P
(I
P
− I
C
)
2
+ (I
P
′
− I
C
)
2
. (3)
Rosten and Drummond proposed a high-speed test to
find the minimum in computationally efficient way.
Scale Invariant Feature Transform. The
SIFT (Lowe, 1999) method provides features
that are translation, rotation and scale invariant. To
achieve this, features are selected at maxima and
minima of a DoG (Difference of Gaussian) function
applied in scale space by building an image pyramid
with resampling between each level. Focusing on
speed the DoG is used to approximate the LoG
(Laplacian of Gaussian). The local maxima or
minima are found by comparing the 8 neighbors
at the same level. These maxima or minima are
compared to the next lowest level of the pyramid.
Speeded Up Robust Features. The SURF (Bay
et al., 2008) are designed with a fast scale space
method using DoB (Difference of Box) filters as a
very basic Hessian matrix approximation. The Hes-
sian matrix H at each scale is defined as:
H =
I
xx
I
xy
I
xy
I
yy
(4)
where I
xx
is the convolution of the Gaussian second
order derivative with the image I. The DoB filters are
implemented by integral images, hence the computa-
tion time is independent of the filter size. The filter re-
sponse is defined as the weighted approximated Hes-
sian determinant, where local maxima identify blob
like structures. The scale space is analysed by up-
scaling the box filter, which is more efficient than
down-scaling the image, followed by a scale space
non-maximum suppression.
STAR. The STAR detector is derived from the Cen-
SurE (Center Surround Extrema) detector (Agrawal
et al., 2008). As well as the SURF the CenSurE is
based on box filters. While DoB filters are not invari-
ant to rotation, Agrawal introduced center-surround
filters that are bi-level. The STAR feature detector
uses a center-surrounded bi-level filter of two rotated
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
304

squares. The filter response is computed for seven
scales and each pixel of the image. In contrast to
SIFT and SURF the sample size is constant on each
scale and is leading to a full spatial resolution at every
scale. Post processing steps are done by non-maximal
and line suppression. Features that lie along an edge
or line are detected due to the Gradient matrix, see
Eq. 1.
Maximal Stable Extremal Regions. The MSER de-
tector (Matas et al., 2002) is designed to detect affine
invariant subsets of maximal stable extremal regions.
MSER are detected by consecutivly binarizing an im-
age by a threshold. The threshold is applied from the
maximal image intensity value to its minimal. At each
step a set of regions Φ is computed by connected com-
ponents analysis. The filter response for each region i
is defined as:
q
i
= |Φ
i+∆
\Φ
i−∆
|/|Φ
i
| (5)
where |... | denotes the cardinality and i ± ∆ the re-
gion at ∆th lower or higher threshold level. The
MSER are identified by the local minimum of q.
3 FEATURE TRACKING
The motion estimation of the detected features is per-
formed using RLOF (Robust Local Optical Flow)
method (Senst et al., 2011) which is derived from the
pyramidal Lucas/Kanade method (Bouguet, 2000).
Based on the spatial and temporal derivatives of a
specified region Ω the RLOF computes the feature
motion using a robust regression framework. A ro-
bust redescending composed quadratic norm was in-
troduced to increase the robustness of motion estima-
tion compared to pyramidal Lucas/Kanade method.
To improve the behaviour at motion boundaries an
adaptive region size strategy is applied to decrease Ω.
The region Ω of a feature is decreased until the feature
is trackable or a minimal region size is reached. The
decision of being trackable is done by analysing the
smallest eigenvalue λ, see Section 2, and the residual
error of the motion estimates.
For the experiment the following parameters are
used: a minimal region size of 7 × 7, a maximal
region size of 15 × 15, the robust norm parameters
σ
1/2
= (8,50), 3 levels and maximal 20 iterations.
The RLOF is performed bidirectional, thus incorrect
tracked features could be detect. We identify these
by checking the consistency of forward and backward
flow using a threshold ε
d
= 1:
||d
I(t)→I(t+1)
+ d
I(t+1)→I(t)
|| < ε
d
(6)
where I(t) → I(t + 1) denote the forward motion and
I(t + 1) → I(t) the reverse.
4 EVALUATION
METHODOLOGY
The Middlebury dataset (Baker et al., 2009) has be-
come an important benchmark regarding dense opti-
cal flow evaluation. It provides synthetic and realistic
pairs of consecutively captured images. The ground
truth is given by optical flow for each pair. We use
the database to evaluate the sparse optical flow re-
sults of the features found by the respective detector
and tracked with the RLOF. We refine the evaluation
methodology of Baker et al. (Baker et al., 2009) in
terms of accuracy, efficiency and covering measures.
For each algorithm and each sequence we record the
T
D
the set of detected features, T
T
⊂ T
D
the set of
tracked trajectories with ˙x
T
the endpoint of each tra-
jectory as well as the runtime. The respective ground
truth motion is given by ˙x
T
GT
the ground truth end-
point of each trajectory.
Accuracy Measures. A basic property is the accu-
racy of the estimated tracks. The most commonly
used measure is the endpoint error (Otte and Nagel,
1994) defined by:
EE( ˙x
T
) = || ˙x
T
− ˙x
T
GT
||
2
. (7)
The compact statistic of the EE is often only given by
the averages. Thus the measurement is affected by the
outliers. Baker et al. proposed robust statistics by ap-
plying a set of thresholds to the error measurements.
This report is limited so we decide to use the Median
of endpoint errors (MEE).
Efficiency Measures. We measure the feature detec-
tion runtime t
D
, which describes the computational
complexity of the detection method and the tracking
efficiency is defined as:
η =
|T
T
|
|T
GT
|
. (8)
In most cases the computational complexity of fea-
ture tracking is dominant. Therefore the tracking ef-
ficiency is an important measurement to trace meth-
ods detecting features which produce small MEE but
a large number of rejected trajectories. Finally the t
denotes the overall detection and tracking runtime.
Covering Measures. Compared with the evaluation
of a dense optical flow method the challenge of com-
paring methods producing sparse motion fields is not
PERFORMANCE EVALUATION OF FEATURE DETECTION FOR LOCAL OPTICAL FLOW TRACKING
305
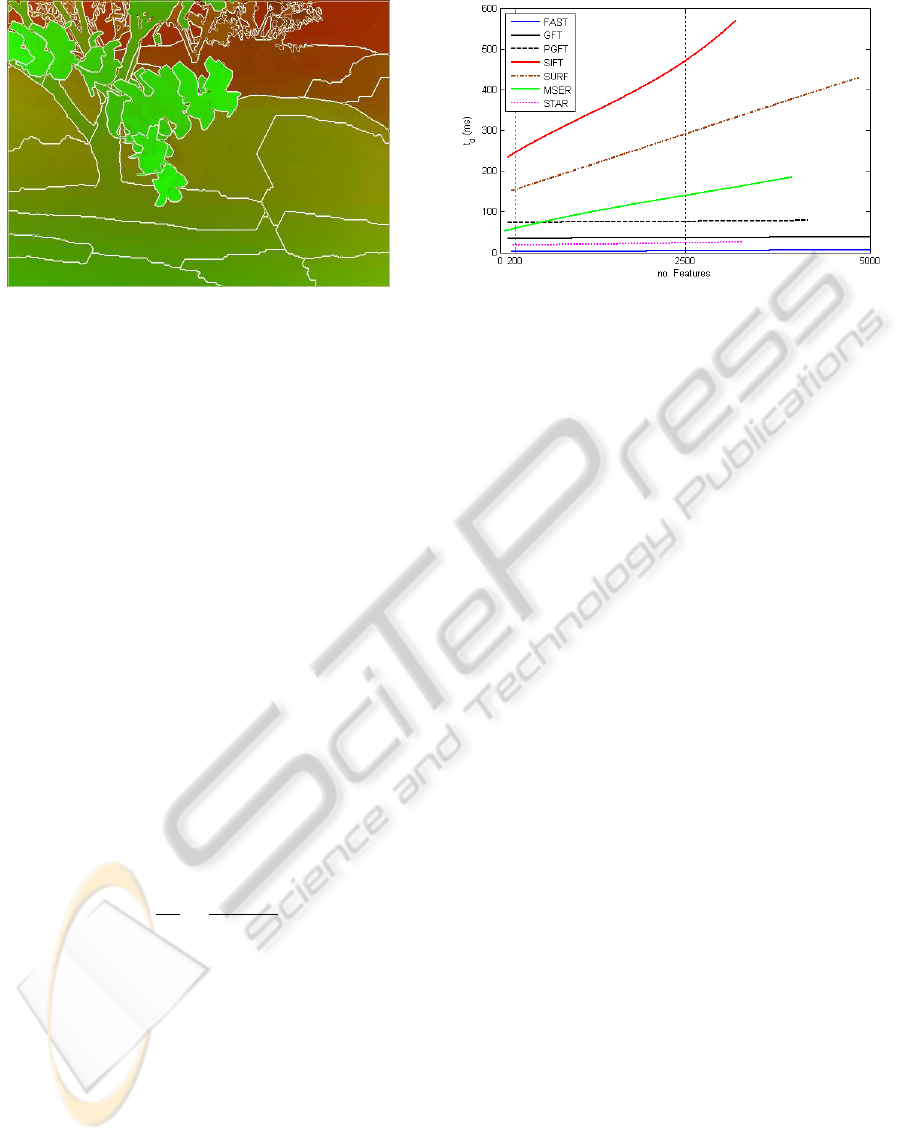
Figure 1: Ground truth optical flow and motion segments of
the Grove2 sequence (The optical flow is shown as color-
code).
only to compare the outliers and the accuracy of the
resulting track, but also to compare whether all the
moving objects are assigned to tracks. In particular
it depends on the application. For example methods
as SLAM (Jonathan and Zhang, 2007) or GME (Tok
et al., 2011) use trajectories of the background. In
these examples it is not critical if the set of trajecto-
ries does not include all foreground objects. But for
applications of motion based image retrieval e.g. ob-
ject segmentation or extraction (Brostow and Cipolla,
2006) all objects have to be covered by trajectories.
The covering measurement ρ is motivated by measur-
ing the ability of the sparse motion field to represent
all different moving objects in a scene. At first the
ground truth is divided into a set of similar moving
regions C by the color structure code segmentation
method. This algorithm (Rehrmann and Priese, 1997)
is modified to deal with a 2D motion field, see Fig-
ure 1. For each region C the density is computed as
the quotient of the number of tracks |T
T
⊂ C| located
at C and the area A
C
of the region. The covering mea-
surement ρ is defined as the mean density.
ρ =
1
|C|
∑
|C|
|T
T
⊂ C|
A
C
(9)
5 EVALUATION RESULTS
In this paper our goal is to provide a set of baseline
results to allow researchers to get a feel for a feature
detector that has a good performance on their specific
problem. For this purpose we evaluate the proposed
detection methods at the operating point of around
200 and 2500 feature points. We choose the operating
point of around 200 points to analyze the performance
of the feature detector with few feature points. Partic-
ularly in that case an ideal detector should provide a
Figure 2: Feature detection runtime t
d
related to the num-
ber of detected features for the Grove3 sequence with VGA
resolution.
high tracking performance, which indicates that the
features are not set to motion boundaries where they
are rejected more likely by the tracker. In contrast
we want to analyze the performance regarding to the
coverage with a denser motion field of around 2500
feature points.
The results for all algorithms are shown in Table 1.
The experiments are performed on an AMD Phenom
II X4 960 running at 2.99 GHz. All feature detections
are computed on the CPU. The feature tracking is im-
plemented by the RLOF method running on a Nvidia
GTX 480 graphic device. The results suggest the fol-
lowing conclusions:
FAST. The FAST detector is designed as a high speed
runtime efficient corner detector, which our experi-
ments confirm. For the 640 × 480 Grove3 sequence
the features detection runtime takes only 2 ms. Fig-
ure 2 shows that t
d
is nearly constant regarding to the
number of detected features. The plain parameteriza-
tion is an additional advantage of this detector. Sum-
marizing the FAST detector is a very fast detector for
a huge set of features with a uniform distribution re-
garding to the moving object.
GFT. The GFT is the third fastest detector in our
benchmark. The runtime t
d
is constant regarding to
the number of detected features except for a small
growing effort of sorting the features. For a small set
of features the GFT has the best coverage rate at the
Grove2 and Grove3, where the texture is distributed
uniformly. At the Urban2 and Urban3 the detector
achieve the best MEE. However it becomes very in-
efficient when sequences include a large set of strong
edges lying at motion boundaries. These features can-
not be tracked. The GFT is a fast and reliable feature
detector at standard scenarios. But it should be used
with caution at sequences with occlusion and homo-
geneous objects.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
306

Table 1: Evaluation results for the Middleburry dataset for approximate 200 feature points (left), 2500 feature points (right).
Measurements are t
d
detection time, t detection and tracking time, η tracking performance, MEE median of endpoint error
and ρ mean feature density per motion segment.
Grove2
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 35 98 2.3 0.113 0.42
PGFT 75 138 1.9 0.114 0.42
FAST 2 63 1.5 0.108 0.30
SIFT 240 304 3.9 0.082 0.26
SURF 156 215 5.1 0.116 0.12
STAR 18 76 8.7 0.152 0.22
MSER 63 124 4.8 0.094 0.18
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 37 112 2.0 0.069 1.03
PGFT 77 156 1.5 0.073 0.90
FAST 4 73 2.1 0.077 2.10
SIFT 508 588 3.1 0.090 1.04
SURF 280 355 2.3 0.079 0.72
STAR 24 98 2.6 0.082 0.84
MSER 142 215 2.2 0.071 1.62
Grove3
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 35 100 6.7 0.168 0.07
PGFT 74 135 8.0 0.165 0.07
FAST 2 64 6.2 0.147 0.03
SIFT 251 318 5.2 0.099 0.06
SURF 151 212 5.4 0.150 0.01
STAR 19 80 9.7 0.134 0.05
MSER 60 123 14.2 0.210 0.02
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 37 113 7.7 0.099 0.35
PGFT 77 158 7.3 0.097 0.34
FAST 4 77 9.6 0.138 0.59
SIFT 522 605 9.0 0.129 0.36
SURF 282 358 8.4 0.129 0.40
STAR 24 99 8.4 0.151 0.31
MSER 148 228 9.5 0.110 0.35
Urban2
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 35 98 11.8 0.084 0.12
PGFT 75 135 11.8 0.085 0.12
FAST 2 59 14.6 0.104 0.13
SIFT 257 320 4.4 0.103 0.04
SURF 158 219 8.1 0.177 0.19
STAR 19 78 18.6 0.207 0.05
MSER 54 115 16.2 0.154 0.07
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 36 117 12.2 0.103 0.64
PGFT 76 159 12.6 0.101 0.59
FAST 5 78 8.6 0.103 1.18
SIFT 506 584 11.8 0.104 0.62
SURF 286 364 10.3 0.126 0.83
STAR 24 99 10.7 0.105 0.63
MSER 104 173 9.8 0.107 0.62
Urban3
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 35 101 11.6 0.057 0.12
PGFT 74 134 9.5 0.062 0.19
FAST 2 59 11.3 0.063 0.21
SIFT 272 336 6.6 0.066 0.07
SURF 158 216 10.4 0.107 0.13
STAR 18 78 9.1 0.089 0.22
MSER 51 112 19.7 0.127 0.06
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 36 114 13.9 0.089 0.45
PGFT 77 161 12.2 0.085 0.48
FAST 5 76 9.1 0.071 0.82
SIFT 534 616 12.5 0.110 0.54
SURF 300 382 11.5 0.100 0.56
STAR 25 102 10.7 0.081 0.59
MSER 94 158 18.0 0.100 0.34
RubberWhale
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 26 77 2.2 0.055 0.06
PGFT 55 106 1.8 0.059 0.07
FAST 1 50 0.5 0.051 0.08
SIFT 183 233 1.1 0.129 0.08
SURF 113 162 4.3 0.180 0.11
STAR 13 62 3.3 0.127 0.10
MSER 51 101 3.0 0.075 0.24
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 27 89 3.2 0.057 0.99
PGFT 56 119 3.2 0.057 1.12
FAST 4 63 2.2 0.050 1.25
SIFT 414 476 1.9 0.057 0.78
SURF 237 299 3.3 0.066 1.06
STAR 18 74 2.0 0.057 0.94
MSER 93 148 2.3 0.051 0.54
Venus
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 18 65 0.6 0.205 0.16
PGFT 38 82 1.7 0.208 0.17
FAST 1 43 4.5 0.202 0.20
SIFT 128 171 1.5 0.188 0.17
SURF 80 122 2.5 0.185 0.13
STAR 9 52 3.3 0.210 0.21
MSER 33 76 4.8 0.183 0.16
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 20 76 6.6 0.225 1.40
PGFT 40 97 7.1 0.235 1.14
FAST 4 57 4.1 0.204 2.28
SIFT 267 319 5.3 0.202 0.83
SURF 218 276 4.9 0.202 1.67
STAR 12 60 4.2 0.227 0.75
MSER 62 108 5.6 0.189 0.67
Hydrangea
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 26 80 0.4 0.283 0.42
PGFT 54 106 0.0 0.306 0.42
FAST 1 50 0.5 0.252 0.25
SIFT 177 228 1.7 0.260 0.24
SURF 115 165 3.9 0.261 0.47
STAR 13 62 3.1 0.279 0.33
MSER 40 90 1.5 0.303 0.54
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 27 93 4.7 0.091 1.24
PGFT 57 124 3.6 0.090 1.27
FAST 5 68 2.6 0.271 3.30
SIFT 411 484 5.7 0.117 1.51
SURF 257 324 4.6 0.102 1.20
STAR 18 80 3.1 0.105 1.34
MSER 89 151 3.0 0.260 2.70
Dimetrodon
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 25 77 0.00 0.049 0.018
PGFT 54 104 0.00 0.057 0.017
FAST 1 49 0.00 0.046 0.017
SIFT 178 230 0.00 0.052 0.019
SURF 113 161 0.00 0.078 0.015
STAR 13 62 0.00 0.051 0.020
MSER 45 96 0.50 0.056 0.017
Method t
D
(ms) t (ms) η (%) MEE ρ (%)
GFT 27 92 0.5 0.138 0.23
PGFT 56 122 0.6 0.138 0.21
FAST 4 62 0.1 0.058 0.19
SIFT 375 438 1.0 0.085 0.16
SURF 247 310 0.4 0.102 0.21
STAR 18 75 0.6 0.119 0.17
MSER 59 109 0.2 0.059 0.05
PGFT. The PGFT improves the GFT in some se-
quence. E.g. Urban3, RubberWhale and Hydrangea,
there the tracking efficiency is decreased and the cov-
erage is increased. However, the benefit results in an
increased detection runtime.
PERFORMANCE EVALUATION OF FEATURE DETECTION FOR LOCAL OPTICAL FLOW TRACKING
307

STAR. Due to the efficient implementation the STAR
method reaches the runtime ranking two. In some
special sequences as Venus or Urban3 it gets good
covering performancewith a low feature set. But gen-
erally the performance of the STAR is below average.
SIFT. As shown in Figure 2 the SIFT detector run-
time depends on the number of features. It is the
slowest of the evaluation. But it shows good perfor-
mance within a low feature set. This method reaches
the best MEE results at Grove2 and Grove3 and the
best tracking performance at the difficult Urban2 and
Urban3. In our experiments the scale space analysis
of the DoG of the SIFT tends to detect less features
at object boundaries. Almost homogeneous regions
are also selected, e.g. the sky of the Grove3 sequence
where tracking is still applicable. Though the set of
objects are not covered uniformly, this results into low
coverage. Summarizing the SIFT detector is a slow
feature detector with a high tracking performance at
sequences with few objects.
SURF. In our experiments the improved runtime per-
formance regarding the SIFT could be confirmed, but
t
d
is still high compared to the other detectors. Re-
lated to SIFT the SURF shows some improvements at
large sets of features in terms of tracking performance
and accuracy. But FAST and GFT are still superior at
large feature sets.
MSER. The MSER is the only method based on seg-
mentation instead of finding features using first or
second order derivatives. In our experiments we could
observe that features are less likely detected at ob-
ject boundaries e.g. in the RubberWhale sequence
features are detected in the center of the fence holes
instead of their corners. Considering the generalized
aperture problem this is an important benefit. But it is
not reflected in the results of the whole dataset, where
the MSER detector achieve average results. Even at
the Venus sequence it performs the best MEE results.
This sequence is also a challenging sequence for
the GFT because it mainly consists of homogeneous
objects. Most of the cornerness regions are distributed
at the object boundaries. Thus MSER and also the
scale space detector SIFT and SURF achieve good re-
sults. That leads to the conclusion that a region based
or a scale space based approach would be attractive to
improve the GFT method.
6 CONCLUSIONS
In this paper we evaluate different feature detectors in
conjunction with the RLOF local optical flow method.
While the state-of-the-art KLT-Tracker operates with
the GFT detector, our goal is to provide a set of base-
line results for alternative feature detectors to allow
researchers to get a sense of which detector to use
for a good performance on their specific problem. To
compare the resulting sparse motion fields we pro-
pose a methodology based on accuracy, efficiencyand
coveringmeasurements. The benchmark is performed
on the Middleyburry dataset, which provides a set of
consecutively captured images and the corresponding
dense motion ground truth.
We observethat the efficient performingalgorithm
is the FAST approach. With a runtime of about 3 ms
for a VGA sequence and an overall good performance
for the tracking efficiency, median endpoint error and
coverage it outperforms the standard GFT detector.
For standard scenarios i.e. uniform texture distribu-
tion the GFT is a fast and reliable feature detector.
From the results given by the evaluations we conclude
that for specific sequences, e.g. sequences includ-
ing homogeneous objects, where the texture distribu-
tion concentrates on object boundaries, there is still
room for improvements. Limited advantages shows
the PGFT but also SIFT and MSER shows enhanced
performance under these conditions. Furthermore an
improved GFT method could benefit from the scale
space analysis of the SIFT or the region based ap-
proach of the MSER.
ACKNOWLEDGEMENTS
The research leading to these results has received
funding from the European Community’s FP7 under
grant agreement number 261743 (NoE VideoSense).
REFERENCES
Agrawal, M., Konolige, K., and Blas, M. (2008). Censure:
Center surround extremas for realtime feature detec-
tion and matching. In European Conference on Com-
puter Vision (ECCV 2008), pages 102–115.
Ali, S. and Shah, M. (2007). A lagrangian particle dynam-
ics approach for crowd flowsegmentation and stability
analysis. In Computer Vision and Pattern Recognition
(CVPR 2007), pages 1 –6.
Baker, S., Scharstein, D., Lewis, J., Roth, S., Black, M. J.,
and Szeliski, R. (2009). A database and evaluation
methodology for optical flow. Technical report MSR-
TR-2009-179, Microsoft Research.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Surf: Speeded up robust features. Computer Vision
and Image Understanding, 110(3):346–359.
Bouguet, J.-Y. (2000). Pyramidal implementation of the lu-
cas kanade feature tracker. Technical report, Intel Cor-
poration Microprocessor Research Lab.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
308

Brostow, G. and Cipolla, R. (2006). Unsupervised bayesian
detection of independent motion in crowds. In Com-
puter Vision and Pattern Recognition (CVPR 2006),
pages 594–601.
Fradet, M., Robert, P., and P´erez, P. (2009). Clustering point
trajectories with various life-spans. In Conference for
Visual Media Production (CVMP 2009), pages 7–14.
Hu, M., Ali, S., and Shah, M. (2008). Detecting global
motion patterns in complex videos. In International
Conference on Pattern Recognition (2008), pages 1 –
5.
Jonathan and Zhang, H. (2007). Quantitative evaluation of
feature extractors for visual slam. In Canadian Con-
ference on Computer and Robot Vision (CRV 2007),
pages 157–164.
Lowe, D. (1999). Object recognition from local scale-
invariant features. In International Conference on
Computer Vision (ICCV 1999), pages 1150–1157.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In International Joint Conference on Artificial
Intelligence (IJCAI 1981), pages 674–679.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2002). Ro-
bust wide baseline stereo from maximally stable ex-
tremal regions. In British Machine Vision Conference
(BMVC 2002), pages 384–393.
Otte, M. and Nagel, H.-H. (1994). Optical flow estimation:
Advances and comparisons. In European Conference
on Computer Vision (ECCV 1994), pages 49–60.
Rehrmann, V. and Priese, L. (1997). Fast and robust seg-
mentation of natural color scenes. In Asian Confer-
ence on Computer Vision (ACCV 1997), pages 598–
606.
Rosten, E. and Drummond, T. (2006). Machine learning for
high-speed corner detection. In European Conference
on Computer Vision (ECCV 2006), pages 430–443.
Senst, T., Eiselein, V., Heras Evangelio, R., and Sikora, T.
(2011). Robust modified L2 local optical flow esti-
mation and feature tracking. In IEEE Workshop on
Motion and Video Computing (WMVC 2011), pages
685–690.
Shi, J. and Tomasi., C. (1994). Good features to track.
In Computer Vision and Pattern Recognition (CVPR
1994), pages 593 –600.
Sinha, S. N., Frahm, J.-M., Pollefeys, M., and Genc, Y.
(2006). Gpu-based video feature tracking and match-
ing. Technical report 06-012, UNC Chapel Hill.
Tok, M., Glantz, A., Krutz, A., and Sikora, T. (2011).
Feature-based global motion estimation using the
helmholtz principle. In International Conference
on Acoustics Speech and Signal Processing (ICASSP
2011), pages 1561–1564.
Tomasi, C. and Kanade, T. (1991). Detection and tracking
of point features. Technical report CMU-CS-91-132,
CMU.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors: a survey. Foundations and Trends
in Computer Vision Graphics Vision., 3:177–280.
Zach, C., Gallup, D., and Frahm, J. (2008). Fast gain-
adaptive klt tracking on the gpu. In Visual Computer
Vision on GPUs workshop (CVGPU 08), pages 1–7.
PERFORMANCE EVALUATION OF FEATURE DETECTION FOR LOCAL OPTICAL FLOW TRACKING
309
