
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL
EMERGENT MULTIAGENT COALITIONS FOR LOAD SHARING
Leland Hovey and Mina Jung
Syracuse University, Syracuse, U.S.A.
Keywords:
Multiagent, Evolution, Load-sharing, Scheduling.
Abstract:
Grid CPU load-sharing is a subclass of computational grid resource management. Its purpose is to improve
grid throughput – High Throughput Computing (HTC). The problem is load-sharing optimization state-space
can be quite large. This is because of two factors: the load-sharing optimization problem is NP-complete,
and a large volume of CPU-intensive loads can require thousands of Internet connected CPUs. Approximate
models can find near-optimal solutions to NP-complete problems. Multiagent coalition formation (MCF) is
a particular approximate game theoretic approach for these problems. We propose a new distributed MCF
(DMCF) model for Grid CPU load-sharing, DMCF grouping genetic algorithm (DMCF-GGA). This paper
presents the model in detail. It also compares this model with our existing model, DMCF-spatial. The com-
parison consists of a discussion of the models’ similarities and differences, and a comprehensive empirical
evalution. The results of this study are the following: The optimization search cost of DMCF-GGA is sig-
nificantly less than DMCF-spatial. DMCF-GGA has a linear relation between coalition size and search cost
(for high throughput). We have found preliminary lower and upper bound estimates for the effective coalition
size. We have also found the average job sizes required for the run time of DMCF-GGA to be 1% of the job
execution time.
1 INTRODUCTION
Currently, computing power for large-scale problem
solving is in demand(Foster and (Eds.), 1999). If this
power is provided by by a vast collection of small
workstations (grid) instead of a single supercomputer,
the financial cost is much less. Grid computing has
evolved to be defined as “flexible, secure, coordi-
nated resource management among dynamic multi-
institutions”, conjoined through the Internet or a ded-
icated network. Resource management is an opti-
mized and dynamic assignment of distributed hetero-
geneous Grid resources. Optimization metrics in-
clude throughput, turnaround time, utilization, mon-
etary cost, or access rights (Ibaraki and Katoh, 1988).
Recent examples of Grids, such as the Large
Hadron Collider (LHC) and Fermi Lab experiments,
have demonstrated the importance of resource man-
agement (RM) and have drawn much active grid RM
research a RM optimized for certain metrics can pro-
vide thecapacity for the large-scalejob quantities pro-
duced by these experiments. The Open Grid Forum
(OGF) and the Globus Alliance are also major orga-
nizations committed to grid research. Both organiza-
tions have specific RM research groups.
A computational grid is a consortium of dis-
tributed CPUs inter-connected by the Internet or ded-
icated links. The purpose is high throughput for large
quantities of CPU-intensive jobs (such as found at
LHC and Fermi). CPU load sharing is a subclass
of RM. Optimized load sharing improves computa-
tional grid throughputby assigning loads (scheduling)
so the load level of all CPUs is close to their capac-
ity. But, since this problem is NP-complete (Fiala and
Paulusma, 2005), and a Grid can have thousands of
inter-connected CPUs, the load-sharing optimization
state-space can be huge.
Approximation models can solve certain opti-
mization problems having large state-spaces (Vazi-
rani, 2004). Multiagent coalition formation (Sand-
holm, 1999) (MCF) is a type of approximate game
theoretic model. MCF enables self-interested agents
to reduce state-space search costs by coordinating
their activities with other agents (e.g., the coordi-
nation of load-sharing among collections of CPUs).
This paper proposes a new distributed MCF (DMCF)
model for Grid CPU load-sharing, DMCF group-
ing genetic algorithm (Michalewicz, 1999) (DMCF-
GGA). The motivationfor this model is it is pragmatic
in terms of algorithm complexity, low cost in terms of
295
Hovey L. and Jung M..
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR LOAD SHARING.
DOI: 10.5220/0003733702950305
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 295-305
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

both searching and communication, and scalable. The
study explains this model is described in detail and
presents the algorithm. It also compares this model
with our existing model, DMCF-spatial. This con-
sists of an explanation of the models’ similarities and
differences, and their empirical evaluation.
1.1 Objectives and Organization
The objectives of this study are a problem state-space
reduction, and a cost/benefit analysis of whether au-
tonomous agents can acquire the Core (section 2.2)
for high throughput coalitions at the smallest search
cost. The remainder of this paper is organized as fol-
lows: the background information and details are pro-
vided in Section 2. Section 3 describes the new model
and explains the similarities and differencesof the this
model and the existing model. Section 4 describes all
experiments utilized for the models’ comparison. Fi-
nally, section 5 discusses implications and future di-
rections.
2 BACKGROUND
This section consists of the following: Section 2.1 ex-
plains how the CPU load sharing problem fits within
the field of Scheduling Theory (ST). It also shows the
classification of our models within all types of ST so-
lutions. Section 2.2 is a detailed description of the
DMCF approach.
2.1 Problem and Solution
Classifications
Generally, most problems within ST have the at-
tributes listed by fig. 1 (Brucker, 2004). This paper’s
problem, CPU load sharing, is a specific scheduling
problem characterized by the underlined items of the
figure. This problem will serve as a basis for future
work encompassing other attributes. The problem is
also known as the generalized assignment or multiple
knapsack problem.
Most scheduling solutions within ST have the
attributes provided by fig. 2. Both DMCF solu-
tion models discussed in this paper are character-
ized by the underlined items of the figure. The first
set of solution attributes is deterministic vs. non-
deterministic. Efficient deterministic solutions to NP-
complete problem have not been found. But, ap-
proximate non-deterministic solutions are an active
research area. Both the compared models are a hy-
brid game theoretic/evolutionary algorithm. They are
game theoretic since they attempt to attain stability in
A. Machines and Architecture
1. Heterogeneous vs. identical machines
2. Multi-purpose vs. uni-purpose machines
3. Static vs. dynamic machine availability
4. Resource allocation vs. job scheduling
5. Metascheduling vs. local scheduling
B. Job Characteristics
• Multiprocessor vs uniprocessor jobs
• Queue size vs. job size
• Divisible vs. non-divisible jobs
• Jobs with deadlines
• Job size estimation
• Job preemption and migration
• Job arrival distribution
C. Optimality Metrics
• Makespan, or turnaround time
• Total flow time, total of turnaround times
• Weighted (total) flow time
• Total throughput
• Earliness
• Lateness
• Square deviation
Figure 1: Grid Scheduling Problem Classification: (1) Ma-
chines and Architecture, (2)Job Characteristics, and (3) Op-
timality Metrics.
A. Deterministic vs. non-deterministic
• Probabilistic
• Control theoretic
• Game theoretic
• Genetic
• Hierarchical
B. Static vs. dynamic
C. Centralized vs. decentralized
Figure 2: Scheduling Theory Solution Classification.
the Core through DMCF (section 2.2). They are also
evolutionary because the search for a coalition struc-
tures is based on an evolutionary algorithm. The sec-
ond set of attributes is static vs dynamic. Both mod-
els are dynamic since nodes can be added or taken
away without changing the algorithms. The third set
of attributes is centralized or decentralized. For a cen-
tralized algorithm (Wu et al., 2004), a single machine
collects load data and determines the optimal alloca-
tion. This locality of control can provide algorithm
efficiency and easy management. But, these algo-
rithms are not scalable and fault tolerant. The Hungar-
ian Method (Kuhn, 1955) and “Mulknap” (Pisinger,
1999) are both existing solutions to the multiple knap-
sack problem. Since they are both centralized, the
cost of large problem instances can be prohibitive.
Decentralized algorithms (Csari et al., 2004; Weich-
hart et al., 2004) divide the overall assignment task
among mutiple sites. These sites can act as both an
allocator and a computing resource. Since no site per-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
296

forms the entire assignment task, decentralized algo-
rithms can be scalable and fault tolerant. However,
these algorithms may incur high communication over-
head (usage monitoring). Also, a centralized algo-
rithm can be closer to optimal than multiple local al-
locators.
2.2 DMCF Overview
A characteristic function game (CFG) is a game in
which a characteristic function determines the value
of each coalition V
S
, where S is a coalition. MCF is a
type of CFG that consists of three phases:
I. Coalition structure generation: construct of parti-
tion
1
of agents where each subset of agents is a
coalition. This partition is called a coalition struc-
ture (CS). Social welfare is the sum of all agent’s
payoffs. The goal of this phase is to maximize the
social welfare of agents A by finding a coalition
structure
2
CS
∗
= arg
CS ∈ partitions of A
max V(CS),
whereV(CS) =
∑
S∈CS
v
S.
Both of this study’s models partition the overall
n autonomous multiagent load sharing problem
into k, (k < n) load sharing subproblems. There
is a coalition of agents for each subproblem. Each
subproblem consists of: (1) a coalition of multia-
gents where each agent (called a node-agent) acts
on behalf of each CPU node, (2) each node-agent
having the task of potentially sharing its load with
some other coalition node.
II. Solve the optimization problem of each coalition.
First, share the tasks and resources of the agents
in the coalition. Next, calculate ∀S ∈ CS, v
S
. Fi-
nally, solve the joint problem. In this study,
DMCF-spatial uses a locality based technique and
DMCF-GGA uses the first fit algorithm.
III. Payoff – dividing the value of the generated coali-
tion structure among agents. The Core is a spe-
cific payoff scheme defined as the agents remain-
ing within the coalitions instead of moving out of
them:
1
A partition of a set X is a set of nonempty subsets of
X such that every element x in X is in exactly one of these
subsets.
2
Superadditivity is when any pair of coalitions is best
off by merging into one. Our model prevents superadditivity
by having a defined coalition size for each experiment.
Core = (
−→
x ,CS) ∀ S ⊂ A,
∑
i∈S
x
i
≥ v
S
and
∑
i∈A
x
i
=
∑
S∈CS
v
S
.
ACS that maximizes social welfare is stable in the
Core (Sandholm, 1999). Both models optimize
throughput and divide this amount evenly among
all agents (e.g., social welfare). Both models ter-
minate if no agents choose to moveout of the final
CS.
3 MODELS: DMCF-GGA AND
DMCF-SPATIAL
This study compares two evolutionary models for
large-scale Grid CPU load sharing optimization: the
new DMCF-GGA and the previous DMCF-spatial.
This section consists of the following: Section 3.1
discusses the similarities and differences of the two
models. Next, section 3.2 describes the DMCF-GGA
algorithm in detail and provides the algorithm code.
3.1 Similarities and Differences
Both models are based on the three-phased DMCF ap-
proach explained in section 2.2. The similarities of
the two models occurs in Phase I as explained in sec-
tion 3.1.1. Section 3.1.2 discusses the differences that
occur both in Phase I and II.
3.1.1 Similarities
Both models have the following attributes in common
for Phase I:
• The agents and algorithms operate in a distributed
environment.
• The agents and algorithms minimize the commu-
nication overhead.
• The emerged CS (partition) maximizes total
throughput (near-optimal).
• The models are pragmatic. Our intention for the
designs and implementations is so they can be
readily deployed as an additional scheduler in
Condor (an existing grid batch job scheduling sys-
tem).
• Coalition formation is due to an evolutionary al-
gorithm. Each coalition is comprized of node-
agents. Initially, the autonomous node-agents
form a CS of k coalitions. Each generation, node-
agents self-organize into a new CS. The sequence
of generations causes a sequence of CSs. Since
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR
LOAD SHARING
297

the coalitions’ members may change, the coali-
tions are dynamic. These evolving CSs have
monotonically increasing fitness. The fitness met-
ric is total throughput.
• A distributed chromosome represents a CS (the
entire state of the Grid). Each of the chromo-
some’s genes specifies a node’s coalition. A gene
is implemented as a node-agent. There is one
node-agent per node. A node-agent acts on be-
half of its node. Hence, the node-agents (chromo-
some) are distributed. Each generation, some of
the gene values are replaced. There is one chro-
mosome for the evolutionary algorithm.
• There are two types of distributed agents;
– condition-action node-agents – the are agents
that self-organize (evolve) into coalitions as de-
scribed above. To construct new coalitions each
generation based on a condition, node-agents
may perform the action of a move. Condition-
action moves are implemented as conditional
migration, and
– cm-agents – these agents distribute coalition
member node-agents with
coalition member
and
throughput
lists, and they distribute these
lists to the other coalitions. There is one cm-
agent for each coalition.
• The genetic operator is conditional migration
(Kowalski and Sadri, 1996). This enables the
node-agents to form new coalitions. The pro-
cedure is: (1) a node-agent starts by randomly
chosing a new candidate coalition, (2) all node-
agents effected by this possible membership de-
termines if the change increases both the through-
put of the coalition where the candidate is from
and the throughput of the coalition where the can-
didate move to, and (3) if so, the node-agent joins
the coalition. The result of all migrations during a
generation is an increase fitness (throughput).
• The average job size is measure in Mflops
3
,
Phase II: the node-agents within each emergent
coalition collaborate to share the job loads (e.g., load
sharing). The load sharing algorithms differ for the
two models (section 3.1.2). The output of this phase
is a map that assigns each coalition job to a specific
coalition node
4
.
3
“Floating point operations per second (FLOPS) has
been the yardstick used by most High Performance Com-
puting (HPC) efforts to rank their systems (Livny et al.,
1997).”
4
A single application of our model has executed on
grids up to 50000 nodes.
Phase III: the payoff is divided evenly among the
node-agents when the agents are stable in the Core
(when no further throughput increases occur).
3.1.2 Differences
For Phase I, the two models differ about: (1) the gene
structure and (2) procedure for conditional migration.
A DMCF-spatial gene is a pair of cartesian coordi-
nates. So, each node-agent is located at a point on a
2-dimensional logical grid (Oliphant, 1994). Node-
agents that have the same spatial proximity
5
belong
to the same coalition. A DMCF-GGA chromosome is
the same as the former. But, the gene of its node-agent
is a coalition ID. DMCF-GGA node-agents with the
same coalition ID belong to the same coalition.
DMCF-GGA is an example of Cooperative Dis-
tributed Problem Solving (CDPS) (Decker et al.,
1998). Fig. 3 presents an evaluation of the agents
(both node-agents and cm-agents) as a CDPS system.
The node-agents operate independently to enable the
coalition to emerge. Since there is no central local-
ity of control, the failure of any node does not hinder
operation of the algorithm. This improves reliability
and fault tolerance. If more nodes are added, more
coalitions are constructed. For the number of nodes
we tested, the number of coalitions does not affect
scalability.
A. Heterogeneity of the system, structural assumptions,
domain and architectural assumptions
1. agent functionality is identical
2. number of agents equals the number of servers
3. the solution evolves
B. Effective coordination to approach common goals
1. agents shares problem solving knowledge through a
cm-agent
2. representation and reasoning of agent goals is optimal
system throughput
3. agent goals interrelate: agents’ throughputs are av-
eraged for coalition throughput and optimal system
throughput
4. range of agent collaboration: critical timing constraints
for the actions of the agents.
C. Organization and control of the system
1. task decomposition: a task consists of partitioning an
individual into coalitions.
2. task allocation: each server has pre-allocated tasks.
Tasks are reallocated to the most efficient server.
3. results collection: the coalition-manager agents col-
lects the results from the node-agents. Then, the
coalition-manager agents all exchange their results.
Figure 3: A cooperative distributed problem solving frame-
work to describe the presented DMCF model.
DMCF-spatial’s conditional migration moves a
5
A node-agent defines a circle of radius
r
that speci-
fies if the nodes belong to the same coalition. Node-agents
located within the radius have the same spatial proximity.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
298
node-agent to the proximity of another coalition if the
throughput of each affected coalitions improves. Pos-
sible coalition overlap is an ancillary effect. DMCF-
GGA’s conditional migration changes a node-agent’s
coalition ID if the throughput of each affected coali-
tions improves. Coalitions do not overlap. This
model’s motivation is to reduce of the load sharing
problem’s search space (e.g., search cost) over the
DMCF-spatial model. DMCF-spatial’s conditional
migrations may consist of many attempts at relocating
nodes at locations outside the neighborhood of every
coalition. But, with DMCF-GGA every conditional
migration is an attempt to join one of a small number
of coalitions.
The DMCF-spatial algorithm for Phase II is the
following: the load a node-agent shares with another
coalition node-agent is inversely proportional to the
number of coalitions where the second node-agent is
a member. (Hovey et al., 2003) contains the algorithm
details. Phase II for DMCF-GGA is the first fit algo-
rithm.
3.2 DMCF-GGA Algorithm
First, this section describes the two types of DMCF-
GGA agents, a node-agent and a cm-agent (fig. 4).
Then, it explains the DMCF-GGA algorithm in detail.
coalition
throughput
push/pull
algorithms
node ID coalition ID node load
(a) node-agent
node load
node load
node load
throughput algorithms
coalition push/pull
coalition ID
(b) cm-agent
Figure 4: The composition of a node-agent and a cm-agent.
A node-agent consists of the following five com-
ponents (fig. 4(a)): (1) node ID - unique node spec-
ifier (0 .. 500), (2) coalition ID - specifies the coali-
tion where the node-agent is a member - the range
of which is [0 .. nCoalitions], (3) node load; the to-
tal of the jobsize of all jobs at the node (Mflops), (4)
coalition throughput; the total throughput (Mflops) of
all coalition members, and (5) algorithms to push/pull
components 1 – 4. In addition, a node-agent remains
located at a specific node throughoutthe DMCF-GGA
algorithm.
A cm-agent has the following four components
(fig. 4(b)): (1) coalition ID; specifies the coalition
where the node-agent is a member (0 .. nCoali-
tions), (2) a node load (Mflops) for each of the coali-
tion members, (3) the throughput of each coalition
(Mflops) in the entire set of coalitions, and (4) algo-
rithms to push/pull components 1 – 3. The location of
each cm-agent is defined by an elect algorithm (sec-
tion 3.2.2). It may change at any generation during
Phase I. But, it remains the same for Phase II.
The DMCF-GGA algorithm (algo. 1) is sum-
marized as follows. The top-level is: (1)
Dis-
tributedInitializeSystem
, then (2)
DistributedE-
volveCoalitions
. The result is a CS having the high-
est total throughput. This procedure’s variables are
AD is an administrative domain
6
, pc is the previous
generation having a change in throughput, and g is
the current generation.
Algorithm 1: DMCF-GGA Top-level: DistributedInitial-
izeSystem and DistributedEvolveCoalitions.
1: procedure DISTRIBUTEDINITIALIZESYSTEM
2: Update-self-AD-cm-agent
3: Update-every-AD-cm-agent
4: When each AD receives “sufficient Mflops” from every AD
cm-agent, the system is initialized.
5: NotifyReady
6: end procedure
7: procedure DISTRIBUTEDEVOLVECOALITIONS
8: repeat
9: ConditionalMigration
10: NotifyDoneMigration
11: CoalitionSnapshot
12: NotifyDoneGeneration
13: until
14: end procedure
3.2.1 DistributedInitializeSystem
DistributedInitializeSystem
can be subdivided
into 3 steps (algo. 1 lines 2–4). These second level
procedures are presented in algo. 2 and they each run
once
7
.
1.
UpdateLocalCMA
, algo. 1 step 2, is listed as algo.
2 lines 1–6. At the start of DMCF-GGA, each
AD has a server for all its nodes. This is the ini-
tial cm-agent (cma). It is chosen at random. Jobs
may start to arrive at each node at this time. The
node-agent records the total job size as the jobs
arrive. If the total Mflops of the jobs is within
a threshold of the node capacity, the node-agent
sends “
Mflops ok
” to that AD’s cma and job ar-
rival is cutoff. The procedure’s variables are: cma
is a cm-agent, t is the total Mflops of all the jobs
on a node, th
t
is the required total jobsize thresh-
old, and cap the capacity of the node (Mflops).
6
An AD is typically a single administrative authority
managing a collection of servers and routers, and the inter-
connecting network(s).
7
at approximately the same time
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR
LOAD SHARING
299

2.
UpdateEveryCMA
(algo. 1 step 3) is listed as algo.
2 lines 7–10. When each cma
s
receives “
Mflops
ok
”, they each send “
Mflops ok
” to every other
cma
r
cm-agent. This procedure’s variables are: n
is a node-agent member of a coalition, cma
s
is the
sender cma, and cma
r
is the receiver cma.
3.
NotifyReady
(algo. 1 step 4) is listed as alg. 2
lines 11 – 19. First, each cma
r
cm-agent receives
“
Mflops ok
” from every cma
s
. Next, each cma
r
sends “
Mflops ok
” to each of its member node-
agents. Then, the node-agents send “
ready
” to
their cma
s
. Each cma
s
sends “
ready
” to every
other cma
r
. Finally, each cma sends “
attempt-
mig
” to each of its member node-agents. This pro-
cedure’s variables are cma
r
is all nodes and they
are acting as receivers.
Algorithm 2: Second-level: InitializeSystem Components.
1: procedure UPDATELOCALCMA
2: ∀cma ∀n ∈ cma,
3: if abs (t - cap) < th
t
then
4: send (“
Mflops ok
”, n, cma);
5: end if
6: end procedure
7: procedure UPDATEEVERYCMA
8: ∀cma ∀n ∈ cma, recv (“
Mflops ok
”, n, cma);
9: ∀cma
s
∀cma
r
, send (“
Mflops ok
”, cma
s
, cma
r
);
10: end procedure
11: procedure NOTIFYREADY
12: ∀cma
s
∀cma
r
, recv (“Mflops ok”, cma
s
, cma
r
);
13: ∀cma
r
∀n ∈ cma
r
, send (
"Mflops ok"
, cma
r′
, n);
14: ∀n ∈ cma
s
∀cma
s
, send (
"ready"
, n, cma
s
);
15: ∀n ∈ cma
s
∀cma
s
, recv (
"ready"
, n, cma
s
);
16: ∀cma
s
∀cma
r
, send (
"ready"
, cma
s
, cma
r
);
17: ∀cma
s
∀cma
r
, recv (
"ready"
, cma
s
, cma
r
);
18: ∀cma
r
∀n ∈ cma
r
, send (
"attempt-mig"
, cma
r
, n);
19: end procedure
3.2.2 DistributedEvolveCoalitions
DistributedEvolveCoalitions can be subdivided as
listed in algo. 1 steps 6–15. Each node-agent runs
7
its own copy of this procedure. This procedure’s vari-
ables are:
cma ≡ coalition manager agent
c ≡ temporary coalition ID
p ≡ probability of migration
nc ≡ total number of coalitions
n(t) ≡ throughput
c
1
≡ coalition where node-agent is migrating from
c
2
≡ coalition where node-agent is migrating to
nm ≡ number of coalition members
cap ≡ node capacity
th
c
≡ coalition threshold
c ID ≡ coalition ID
An explanation of these steps follows. Algo. 1 step 7:
Repeat steps 8 – 12 until there is no increase of total
throughput for 100 generations
8
.
8
For grid size above 500, the fitness approaches the
maximum more slowly. So, the number of generations for
the stopping condition increases.
ConditionalMigration
(algo. 1 step 8) is listed
as algo. 3. When each node-agent receives either
“
ready
” or “
attempt-mig
”, it attempts to migrate with
probability “p”. Temporarily, the node-agent ran-
domly chooses a new coalition ID. A migration oc-
curs if the condition (algo. 3: steps 8 – 11) is met.
Intuitively, a node migrates if; a) it is overloaded, its
coalition is overloaded, and the coalition it moves to
is underloaded, or b) if it underloaded, its coalition
is underloaded, and the coalition it moves to is over-
loaded. If this condition is met, the temporary new
coalition becomes fixed (for at least for one genera-
tion). Then, each node-agent, whether or not it mi-
grates, sends “
done-mig
” to its cm-agent.
Algorithm 3: Second-level: Conditional Migration.
1: procedure CONDITIONALMIGRATION
2: ∀cma ∀n ∈ cma,
3: recv (
"attempt mig"
, cma, n);
4: if (
rand()
< p) then
5:
c = int (urand[0..nc])
6: ε
1
= (n(t)
c
1
− (nm× cap));
7: ε
2
= (n(t)
c
2
− (nm× cap));
8: if
9: ((n(t)
n
> cap) && ε
1
> th
c
&& ε
2
< th
c
) ||
10: ((n(t)
n
< cap) && ε
1
< th
c
&& ε
2
> th
c
)
11: then
12:
c ID = c
;
13: end if
14: end if
15: send (
"done-mig"
, n, cma);
16: end procedure
NotifyDoneGeneration
(algo. 1 step 12), is listed
as algo. 4 lines 19–23. Each cm-agent
7
sends “
done-
gen
” to all other cm-agents. Then, each cm-agent
sends “
attempt-mig
” to its member node-agents. Fi-
nally, either another generation begins or the evolu-
tionary process terminates.
NotifyDoneMigration
(algo. 1 step 9) is listed as
algo. 4 lines 1–5. When a cm-agent receives a “
done-
mig
” from all its member node-agents, it then sends
7
“
done-mig
” to all other cm-agents.
CoalitionSnap-
shot
(algo. 1 step 10) is listed as algo. 4 lines 6–
15. The node-agents each send
7
their
node-ID
and
load
to their cm-agent. When a cm-agent receives
these items from all its member node-agents, it con-
structs two new lists, the member-list (
mem-list
) and
the member load-list (
ld-list
). These lists are sent to
the other cm-agents. When each cm-agent receives all
lists, they then send them to the member node-agents.
Elect
(algo. 1 step 11) is listed as algo. 4, lines 16–
18. Each existing cm-agent
7
begins an election of a
new cm-agent for the members of the new coalition
(Bully algorithm (Garcia-Molina, 1982)).
ICAART 2012 - International Conference on Agents and Artificial Intelligence
300

Algorithm 4: Second-level: DistributedEvolveCoalitions
Components.
1: procedure NOTIFYDONEMIGRATION
2: ∀cma ∀n ∈ cma recv (
"done-mig"
, n, cma);
3: ∀cma
f
∀cma
t
send (
"done-mig"
, cma
f
, cma
t
);
4: ∀cma
f
∀cma
t
recv (
"done-mig"
, cma);
5: end procedure
6: procedure COALITIONSNAPSHOT
7: ∀cma ∀n ∈ cma send (
node-ID
,
load
, n, cma);
8: ∀cma ∀n ∈ cma recv (
node-ID
,
load
, n);
9: ∀cma
10: ConstructLists (
mem-list
,
ld-list
);
11: ∀cma
f
∀cma
t
send (
mem-list
,
ld-list
, cma
f
, cma
t
);
12: ∀cma
f
∀cma
t
recv (
mem-list
,
ld-list
, cma
f
, cma
t
);
13: ∀cma ∀n ∈ cma send (
mem-lists
,
ld-lists
, cma, n);
14: ∀cma ∀n ∈ cma recv (
mem-lists
,
ld-lists
, cma, n);
15: end procedure
16: procedure Elect
17: ∀cma Bully ();
18: end procedure
19: procedure NOTIFYDONEGENERATION
20: ∀cma
f
∀cma
t
send (
"done gen g"
, cma
t
, cma
f
);
21: ∀cma
f
∀cma
t
recv (
"done gen g"
, cma
t
, cma
f
);
22: ∀cma ∀n ∈ cma, send (
"attempt-mig"
, n);
23: end procedure
4 EXPERIMENTS
This study’s extensive experiments are a preliminary
comparison of the DMCF-spatial and DMCF-GGA
models. The metrics measured were (1) average
coaliton throughput, and (2) overall search cost. They
use a estimate of the communication cost. This sec-
tion contains the configurations of all experiments,
and the results of these experiments.
4.1 Configurations
The comparison consisted 2 sets of five series of
experiments. The first set measured DMCF-spatial
and the second set measured a similarly configured
DMCF-GGA. Fig. 5 lists all the attributes common to
both models. The series of five experiments consists
of an experiment for each coalition size. The experi-
ments were performed on a simulated Grid consisting
of 500 nodes. This simulated grid is modelled after
the existingDAS-3 (Distributed ASCI Supercomputer
3) grid. DAS-3’s worst case latency between two ma-
jor nodes is 0.7 msec. Most of this latency is due to
physical fiber distance traveled.
9,10
9
A maximum throughput was found in relatively few
generations if the experiments had the total size of the all
arriving jobs uniform on 1000M±500M. So, a precise com-
parision of the models was not possible.
10
(19 × 526) + (1 × 10000) = 20000 M flops
Attribute Value
nodes in the Grid 500
coalition sizes for each
series
[23, 33, 45, 83, 100]
migration threshold for
each series
[0.05 - 1.20] incremented by 0.05
job type cpu-intensive
node capacity 1000 Mflops per sec
total size of arriving
jobs for every 20 nodes
in the Grid
19 nodes @ 526±500 Mflops
and 1 node @ 10000±500
Mflops
probability of
migration, p
0.25
condition of termination no change for 100 generations
(the Core is attained)
metrics total throughput and migration
count
number of trials 30
Figure 5: The attributes and values of the DMCF-spatial
and DMCF-GGA experiments.
4.2 Results
This section contains the results of the following
experiments: Phase I – Migration Threshold vs.
Throughput and Migration Counts, Phase I Migra-
tion Counts vs. Throughput, Phase II – Load Sharing
Counts, and Overall Performance.
Phase I – Migration Threshold vs. Throughput
and Migration Counts: The experiments showed that
increasing the threshold, decreased the total through-
put and decreased the migration counts. The migra-
tion threshold may be viewed as the allowed error
in existing coalition throughput. For both models, a
node may migrate if the average coalition throughput
is above the threshold. Higher allowed error means
fewer coalitions are candidates for migration. This
causes both fewer migrations, and lowers the total
throughput.
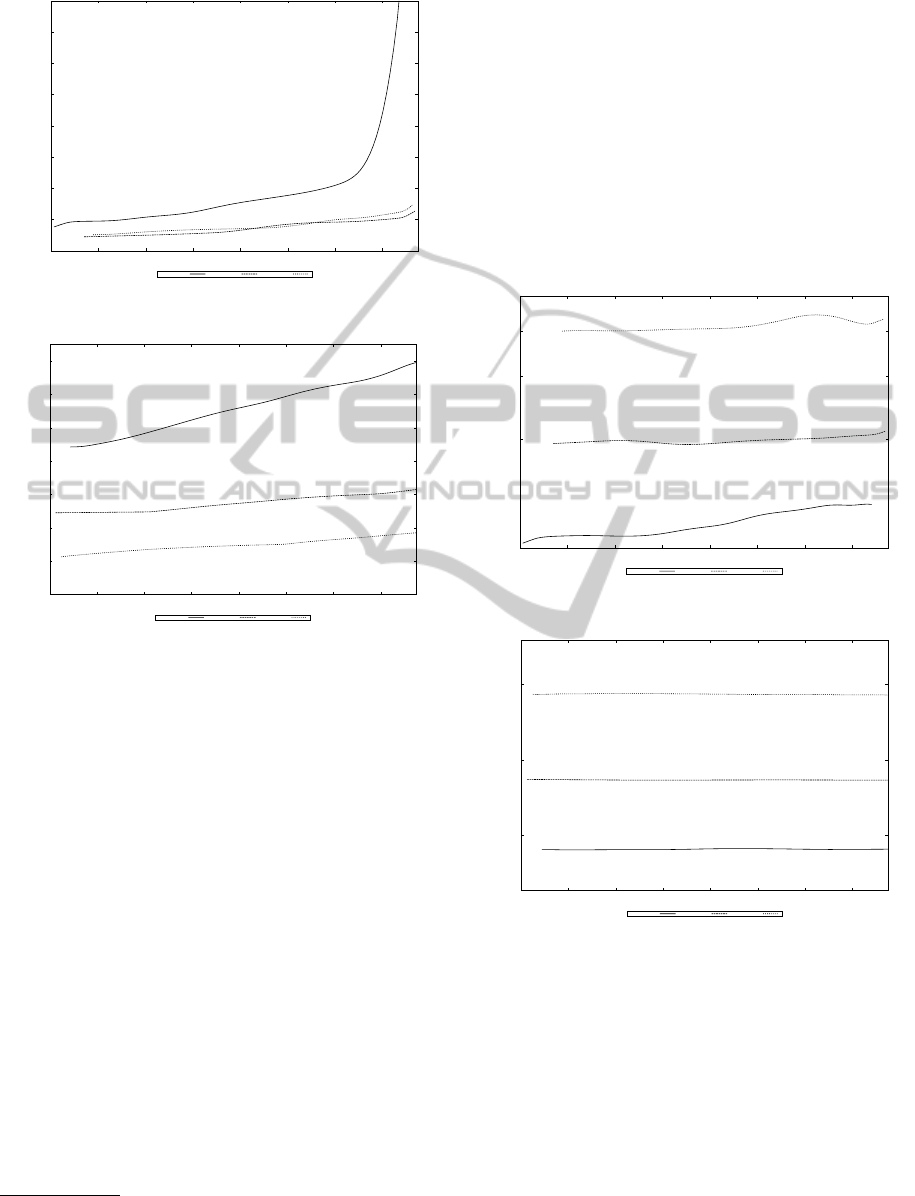
4.2.1 Phase I – Migration Counts vs.
Throughput
The threshold selected to produce the following
graphs has the fewest counts per throughput value.
Fig. 6 depicts the migration counts compared to
throughput for DMCF-spatial (fig. 6(a)) and DMCF-
GGA model (fig. 6(b)). Both graphs have plots where
coalition sizes are fixed at [23, 45, 100] (only 3 of
5 coalition sizes are shown). First, migration counts
decrease as the coalition size increases. This may
be because as the coalition size increases, the prob-
ability of finding underloaded nodes to compensate
for overloaded nodes, increases. Hence, coalitions do
not need to change and there are fewer migrations.
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR
LOAD SHARING
301
0.000e+00
1.000e+05
2.000e+05
3.000e+05
4.000e+05
5.000e+05
6.000e+05
7.000e+05
8.000e+05
4.800e+05 4.820e+05 4.840e+05 4.860e+05 4.880e+05 4.900e+05 4.920e+05 4.940e+05
Migration Counts
Throughput
m-counts-former
23 nodes 45 nodes 100 nodes
a: DMCF-spatial model: the x-axis is the throughput, and
(a) DMCF-spatial model: the x-axis is the throughput, and the y-axis is the
migration count.
the y-axis is the migration count.
0.000e+00
2.000e+04
4.000e+04
6.000e+04
8.000e+04
1.000e+05
1.200e+05
1.400e+05
4.800e+05 4.820e+05 4.840e+05 4.860e+05 4.880e+05 4.900e+05 4.920e+05 4.940e+05
Mutation Counts
Throughput
Improved: Load Sharing Counts v. Throughput (01)
23 nodes 45 nodes 100 nodes
b: DMCF-GGA model: the x-axis is the throughput, and
(b) DMCF-GGA model: the x-axis is the throughput, and the y-axis is the
migration count.
Figure 6: The two graphs compare the coalition formation
search of the DMCF-spatial and the DMCF-GGA models.
Each graph plots migration counts versus throughput for
coalition sizes [23, 45, 100].
Secondly, both graphs show the migration counts in-
crease as the throughput increases. This is likely due
to an accumulation of migration counts as the gen-
erations proceed
11
. Also, DMCF-spatial has an ex-
ponential count increase for high throughputs if the
coalition size is small (23). But DMCF-GGA shows
the migration count increase over throughput is ap-
proximately linear for all coalition sizes. Finally,
the graphs show the DMCF-GGA model has migra-
tion counts that are significantly smaller than DMCF-
spatial (for all throughput values); >49% fewer if the
coalition size of 23, >42% fewer for a coalition size
of 45, and >43% for a coalition size of 100.
11
Throughput is monotonically increasing from one gen-
eration to the next.
4.2.2 Phase II – Load Sharing Counts vs.
Throughput
Fig. 7 shows load sharing counts compared to
throughput for DMCF-spatial (fig. 7(a)) and DMCF-
GGA (fig. 7(b)). For each coalition size (23, 45, 100),
the DMCF-GGA model has considerably fewer state
searches compared to DMCF-spatial (>17%). Also,
the load sharing count among coalition members does
not change as throughput increases. This is proba-
bly due to the implementation of FF as an exhaustive
search. But, it will be improved in our future work.
a: DMCF-spatial model: the x-axis is the throughput, and
5.000e+06
1.000e+07
1.500e+07
2.000e+07
4.800e+05 4.820e+05 4.840e+05 4.860e+05 4.880e+05 4.900e+05 4.920e+05 4.940e+05
Load Sharing Counts
Throughput
Former: Load Sharing Counts v. Throughput
23 nodes 45 nodes 100 nodes
a: DMCF-spatial model: the x-axis is the throughput and
(a) DMCF-spatial model: the x-axis is the throughput and the y-axis is the
load sharing state change count.
b: DMCF-GGA model: the x-axis is the throughput, and
the y-axis is the load sharing state change count.
3.000e+05
5.000e+05
1.000e+06
2.000e+06
4.800e+05 4.820e+05 4.840e+05 4.860e+05 4.880e+05 4.900e+05 4.920e+05 4.940e+05
Load Sharing Counts
Throughput
Improved: Load Sharing Counts v. Throughput (01)
23 nodes 45 nodes 100 nodes
b: DMCF-GGA model: the x-axis is the throughput and
(b) DMCF-GGA model: the x-axis is the throughput and the y-axis is the
load sharing state change count.
Figure 7: The two graphs compare local load sharing
within the coalition of the DMCF-spatial and the DMCF-
GGA models. Each graph plots state change counts versus
throughput for coalition sizes [23, 45, 100].
4.2.3 Overall Performance
4.2.3.1 Comparison of DMCF-GGA to Existing
Methods. We compared the results of the DMCF-
GGA experiments to three existing methods (1) first
come first served (FCFS), (2) FCFS first fit (FCFS-
FF), and (3) round robin (RR). The first method,
ICAART 2012 - International Conference on Agents and Artificial Intelligence
302
FCFS, is Condor’s scheduling method. If FCFS is uti-
lized on a grid of 500 servers, the total throughput is
2.74e5. DMCF-GGA improves total throughput by
80% over FCFS for a coalition size of 23. The sec-
ond method, FCFS-FF, uses FCFS to form coalitions
and then it uses FF to load share within each coalition.
The results are shown in fig. 8(a). DMCF-GGA has a
19% improvement for a coalition size of 23. The re-
sults of the third method, RR, are depicted in fig. 8(b).
Though DMCF-GGA’s throughput gains are small,
DMCF-GGA uses 50% fewer state changes. More-
over, DMCF-GGA forms coalitions that require less
load sharing than RR.
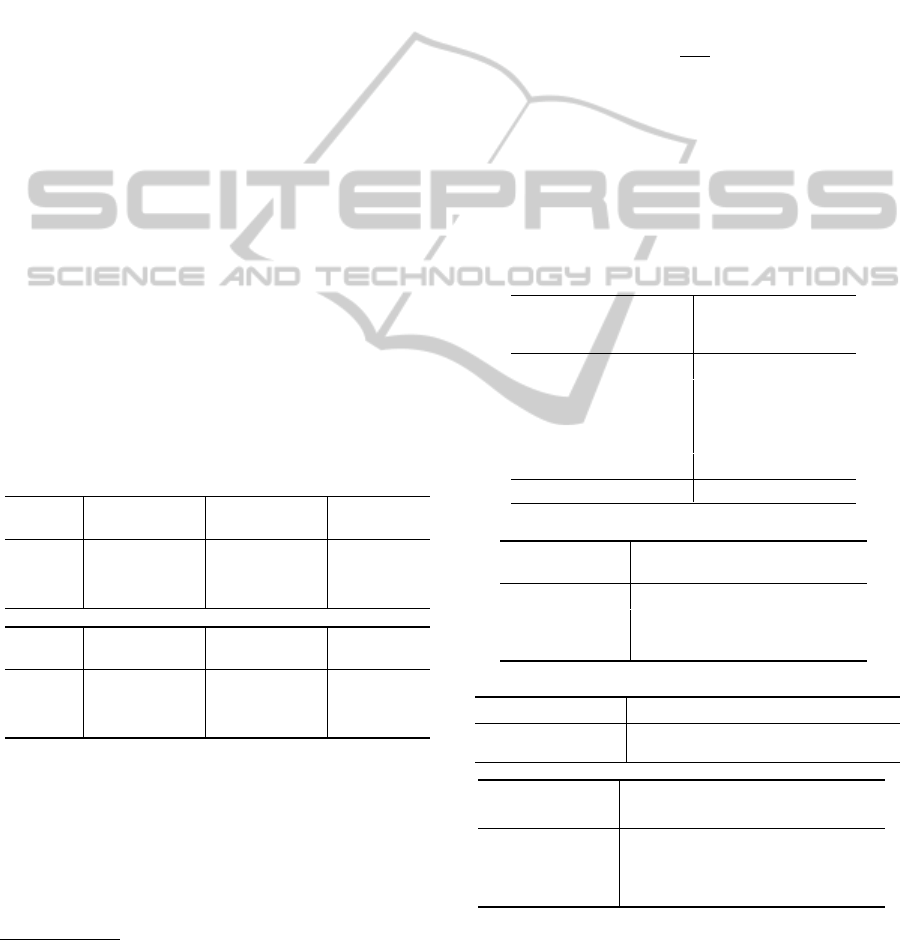
4.2.3.2 DMCF-GGA Cost (Seconds). Figs 9(a)
and 9(b) lists the cost of DMCF-GGA Phase I, fig.
9(c) has Phase II, and their total – the overall cost –
is provided by fig. 9(d). The propagation delay used
in figs. 9(a) – 9(c) is counts
12
× 0.7 msec
13
. Eqn.
1 calculates the Phase I cost, where α is the Phase I
overhead cost given by fig. 9(a), 225 is the average
number of generations to attain the Core, and β is the
migration counts given by fig. 9(b).
cost
Phase
I
= α× 225+ β (1)
The total DMCF-GGA cost, cost
total
, is calculated by
eqn. 2, where cost
Phase
II
is the cost of FF (fig. 9(c)).
Fig. 9(d) provides the totals.
cost
total
= cost
Phase
I
+ cost
Phase
II
(2)
coalition
size
FCFS with FF DMCF-GGA Percent Im-
provement
23 4.15e5 4.95e5 19
45 4.29e5 4.99e5 14
100 4.61e5 4.99e5 8
(a) Maximum throughput of FCFS-FF vs. DMCF-GGA
coalition
size
Round Robin DMCF-GGA Percent Im-
provement
23 4.63e5 4.95e5 8
45 4.62e5 4.99e5 8
100 4.94e5 4.99e5 1
(b) Maximum throughput of Round Robin vs. DMCF-GGA
Figure 8: Comparison of DMCF-GGA and existing solu-
tions in terms of total throughput.
4.2.3.3 Cost/Benefit Observations. The number
of generations is seen to have a large effect on the
overhead (fig. 9(a)). The overhead has a greater ef-
fect on Phase I cost than migration’s states searched
12
migration search counts
13
0.7 msec is DAS-3’s worst case node to node latency.
DAS-3 has direct optical links between nodes. A congested
link does not have a large effect on latency.
for the given coalition sizes (6.3× 225 = 1417ms vs.
9(b)). This may not be the case if coalitions smaller
than 23 are used. Phase I has a 64% greater effect on
total cost than Phase II for coalition size of 23, (figs.
9(a), 9(b), and 9(c)). Hence, FF is not a bottleneck
for small coalitions, but it is one for the larger sized
coalitions. A goal in our future work is to find an ex-
act upper bound for coalition sizes.
Fig. 9(d) (the result of 2) shows coalition size to
have a greater effect on search cost than throughput.
Eqn. 3 gives the sec/(coalition size) relation.
y = 0.023x
sec
size
+ 2.213 (3)
Though this suggests small coalitions reduce
search cost, migration counts increase as the coali-
tion size decreases. So, we also need to find an exact
lower bound for coalition sizes. In addition, the re-
sults of fig. 9(d) imply for DMCF-GGA to run at 1%
of the execution time the job duration is 221.3 (sec)
for a coalition size of 23, 266.3 (sec) for a coalition
size of 45, and 399.4 (sec) for a coalition size of 100.
Procedure Counts Overhead
Cost
(ms)
ConditionalMigration 1 0.7
NotifyDoneMigration 1 0.7
CoalitionSnapshot 3 2.1
Elect 2 1.4
NotifyDoneGeneration 2 1.4
Totals for Phase I 9 6.3
(a) Overhead cost (cost of communication) per generation for
Phase I procedures.
Counts Migration
Cost (ms)
throughput 980 239,115, or 62 167, 80, 43
throughput 985 253,120, or 67 177, 84, 47
throughput 990 275,126, or 74 192, 88, 52
(b) Cost (ms) for Phase I – Migration – coalition sizes of 23, 45,
and 100
Counts FF Cost (ms)
all throughput
levels
884, 1660, 3620 618, 1162, 2534
(c) Cost (ms) for Phase II – First Fit – coalition sizes of 23, 45, and 100
Total cost for each coalition size (sec)
23 45 100
throughput 4.90e5 2.202 2.659 3.995
throughput 4.92e5 2.213 2.663 3.999
throughput 4.95e5 2.227 2.668 4.004
(d) Total search cost (sec) for different coalition sizes.
Figure 9: Search cost (sec) for DMCF-GGA Phases I and
II, including the effect of the network.
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR
LOAD SHARING
303

5 CONCLUSIONS AND FUTURE
DIRECTIONS
First, an important result of this study is the search
cost of both migration and local load sharing of
DMCF-GGA is less than DMCF-spatial by a factor
of 10. Also, DMCF-GGA outperforms the controls,
FCFS, FCFS-FF and RR (sec. 4.2.3.1). Thus, DMCF-
GGA may be a candidate for use as a scheduler in
Condor. Secondly, it has determined the linear rela-
tion between coalition size and search cost for high
throughput. And, we have found preliminary esti-
mates for the lower and upper bounds of the effective
coalition size. Further, we have found the average job
sizes required for DMCF-GGA to run at 1% of the job
execution time.
In our future work, optimizing Phase I must be a
priority since as the model scales up to 50,000, the
Phase I cost scales increases 100:1. Given that the
number of generations and counts for migration are
the main factors for the delay, improving the search
precision (e.g. adding a bulk migrate) could reduce
the delay. A bulk migration could be defined as 20%
of a coalition’s nodes migrating at the same time.
Also, currently migration may get stuck at a local
maximum for some cases
14
. Bulk migration may pre-
vent this.
Generally, it seems that the difficulty of the prob-
lem (e.g. job size composition) has a large effect
on both the number of generations and the states
searched during migration. Finding a precise correla-
tion between problem difficulty, and these two factors
is another goal.
For the remainder of our work plan we envision
the following items: (1) To make the model more
realistic, jobs should be non-divisible. (2) Since,
for DMCF-spatial, coalitions may overlap, the data
about coalition composition is unclear. But, study
of DMCF-GGA coalition composition in detail may
offer insight about conditional search. Specifically,
finding how job size compositions and coalition com-
positions affect the relation between coalition size
and search cost. (3) Restructure the model so it can
encompass multicore nodes. (4) Performance test
DMCF-GGA within the SimGrid framework. This
framework enables the simulation of applications in
a distributed computing environment for controlled
development and evaluation of the algorithms. (5)
Matchmaking (Raman et al., 1998) is a component of
Condor, and we will enhance it with the DMCF-GGA
algorithm.
14
because it may terminate after no change for 100 gen-
erations, and a change may occur after 100 generations.
ACKNOWLEDGEMENTS
I would like to thank Jae C. Oh, Dmitri E. Volper and
Judy Qiu for their suggestions and support.
REFERENCES
Brucker, P. (2004). Scheduling, chapter Computational
Complexity, pages 50–60. Springer, Osnabruck, Ger-
many, 4th edition.
Csari, B., Monostori, L., and Kadar, B. (2004). Learning
and cooperation in a distributed market-based produc-
tion control system. In Proceedings of the 5th Interna-
tional Workshop on Emergent Synthesis, pages 109–
116.
Decker, K., Durfee, E., and Lesser, V. (1998). Evaluating
Research in Cooperative Distributed Problem Solving.
UMass Computer Science Technical Report 88-89.
Fiala, J. and Paulusma, D. (2005). A complete complexity
classification of the role assignment problem. Theor.
Comput. Sci., 349:67–81.
Foster, I. and (Eds.), C. K. (1999). The Grid: Blueprint for a
Future Computing Infrastructure. Morgan Kaufmann
Publishers.
Garcia-Molina, H. (1982). Elections in a distributed com-
puting system. IEEE Trans. Comput., 31:48–59.
Hovey, L., Volper, D. E., and Oh, J. C. (2003). Adaptive
dynamic load-balancing through evolutionary forma-
tion of coalitions. In Abraham, A., Koppen, M., and
Franke, K., editors, Design and Application of Hy-
brid Intellient Systems, pages 194–203, Ohmsha. IOS
Press.
Ibaraki, T. and Katoh, N. (1988). Resource Allocation Prob-
lems: Algorithmic Approaches, chapter 1, pages 1–9.
MIT Press, Cambridge, MA, USA.
Kowalski, R. and Sadri, F. (1996). Towards a unified agent
architecture that combines rationality with reactivity.
In Pedreschi, D. and Zaniolo, C., editors, Logic in
Databases, volume 1154 of Lecture Notes in Com-
puter Science, pages 135–149. Springer Berlin / Hei-
delberg. 10.1007/BFb0031739.
Kuhn, H. W. (1955). The Hungarian method for the assign-
ment problem. Naval Research Logistic Quarterly,
2:83–97.
Livny, M., Basney, J., Raman, R., and Tannenbaum, T.
(1997). Mechanisms for high throughput computing.
SPEEDUP Journal, 11(1).
Michalewicz, Z. (1999). Genetic Algorithms + Data Struc-
ture = Evolution Programs, chapter 11, pages 251–
253. Springer-Verlag, New York, New York.
Oliphant, M. (1994). Evolving cooperation in the non-
iterated prisoner’s dilemma: The importance of spa-
tial organization. In Brooks, R. and Maes, P., editors,
Artificial Life IV: Proceedings of the Fourth Interna-
tional Workshop on the Synthesis and Simulation of
Living Systems, pages 349–352. MIT Press.
Pisinger, D. (1999). An exact algorithm for large multiple
knapsack problems. European Journal of Operational
Research, 114:528–541.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
304

Raman, R., Livny, M., and Solomon, M. (1998). Match-
making: Distributed resource management for high
throughput computing. In Proceedings of the Sev-
enth IEEE International Symposium on High Perfor-
mance Distributed Computing (HPDC7), pages 28–
31, Chicago, IL.
Sandholm, T. (1999). Distributed rational decision mak-
ing. In Weiss, G., editor, Multiagent Systems. A mod-
ern approach to distributed artificial intelligence, vol-
ume 1 of Reviews in important subjects, chapter 5,
pages 241–251. The MIT Press, Munich, Germany.
Vazirani, V. V. (2004). Approximation Algorithms, chap-
ter 1, pages 1–2. Springer.
Weichhart, G., Affenzeller, M., Reitbauer, A., and Wagner,
S. (2004). Modelling of an agent-based schedule op-
timisation system. In Proceedings of the IMS Interna-
tional Forum.
Wu, A. S., Yu, H., Jin, S., and Lin, K.-C. (2004). An in-
cremental genetic algorithm approach to multiproces-
sor scheduling. IEEE Trans. Parallel Distrib. Syst.,
15(9):824–834. Member-Schiavone, Guy.
HIGH THROUGHPUT COMPUTING DUE TO NEAR-OPTIMAL EMERGENT MULTIAGENT COALITIONS FOR
LOAD SHARING
305
