
TRAFFIC LIGHT RECOGNITION USING CIRCULAR
SEPARABILITY FILTER
Shodai Horima and Kazunori Onoguchi
Graduate School of Science and Technology, Hirosaki University, 3 Bunkyo-cho, Hirosaki, Aomori, 036-8561, Japan
Keywords: Traffic light detection, Traffic light recognition, Color identification, Circular Separability Filter, ITS.
Abstract: This paper proposes the camera-based approach to recognize the traffic light for driver assistance. The
circular separability filter applied to RGB images extracts the area of the traffic light. The separability has
large value in the boundary where the intensity between two areas changes like the step and it doesn't
depend on the intensity difference (height of the step). Scanning the circular mask in each RGB image, the
separability is calculated. The separability becomes large in an area where a color is homogeneous and a
shape is similar to the circle. Therefore, the pixel with large separability is selected as the candidate of the
traffic light. Unlike the conventional method which calculates the circularity from the binarized region, the
proposed method can identify the traffic light whose outline is indistinct and whose radius is small. At first,
the proposed method removes the region where the saturation is low and the brightness is extremely low or
high because there is few possibility that the traffic light is included in these regions. Next, the circular
mask is scanned in each RGB image captured from the on-vehicle color camera and the separability
between the inside circle and the outside ring is calculated. The maximum value of separability calculated in
RGB images is selected as the separability of each pixel. Pixels with large separability are detected as the
candidate region of the traffic light. Finally, the candidate region around which inactive traffic lamps exist is
identified as the traffic light. Experiments recognizing various traffic lights under various weathers and time
show the effectiveness of the proposed method.
1 INTRODUCTION
More than 700,000 traffic accidents a year still occur
in Japan though the number of traffic accidents tend
to decrease recently. Because older drivers will also
increase, it is expected that the risk of the traffic
accident will rise in the future. To deal with this
situation, many driving support technologies have
been developed as part of Intelligent Transport
Systems (ITS). It is important to decrease the traffic
accident in the intersection because more than half
of traffic accidents occur in intersections. In the
intersection, overlooking or misidentifying a traffic
light caused the serious accident. Therefore, the
driving support system which rouses the attention or
avoids danger by showing an aspect of the traffic
light to the driver is very useful.
It requires large cost and large time to construct
the road-to-vehicle communication system
transmitting an aspect of the traffic light to vehicles
by the telecommunication facility. Therefore, a lot of
methods to recognize the color of the active traffic
light in images captured from the on-vehicle camera
have been proposed. Because an active traffic light
is usually a red, yellow or green bright region, most
of conventional methods first convert the RGB color
space to some color spaces so as to detect candidate
regions with specific colors of traffic lights. Then,
candidate regions are detected in the converted
image by the binarization and the morphological
operation. Finally, traffic lights are identified by
verifying information around candidate regions, e.g.,
their contours. M. R. Yelal et al. (M. R. Yelal, 2006)
proposed the method using the La*b* color space.
This method detects only traffic lights with simple
background, e.g., clear sky because traffic lights are
identified by verifying edge information around
candidate regions. L. Tsinas et al. (L. Tsinas, 1996)
proposed the method using the HSI color space. This
method causes a lot of false detection because
candidate regions of traffic lights are verified by
only the size of the region. Several methods
identifying the traffic light from the circularity of the
candidate region were proposed because the outline
277
Horima S. and Onoguchi K. (2012).
TRAFFIC LIGHT RECOGNITION USING CIRCULAR SEPARABILITY FILTER.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 277-283
DOI: 10.5220/0003741402770283
Copyright
c
SciTePress

Figure 1: Circular separability fileter. (a) Conventional
filter. (b) Proposed filter.
of the traffic light is a circle. K. Lu et al. (K. Lu,
2005) evaluated the circularity of the traffic light by
the difference between the maximum distance and
the minimum distance from the center of the
candidate region to the contour point. M. Omach et
al. (M. Omachi, 2009) evaluated the circularity of
the candidate region by the Hough Transform. J.
Park et al. (J. Park, 2009) distinguished whether or
not the candidate region is the traffic light by the
Haralick's circularity and intensities in right and left
neighbor regions. D. Nienhuser et al. (D. Nienhuser,
2010) use a morphological operator to extract
circular regions. These methods estimate the
circularity of the candidate region obtained by
binarizing the color conversion image. Therefore,
they are very sensitive to the threshold for the
binarization. Moreover, it is difficult to identify the
traffic light whose shape is distorted in an image
because of the brightness saturation or whose view
is small because of the distance. Though some
methods (A. Nakano, 2010) recognize the traffic
light by learning a variety of traffic light images, it is
difficult to detect the traffic light in the complicated
background under various brightness.
This paper proposes the method to recognize the
traffic light by applying the circular separability
filter (K. Fukui, 1988), (K. Fukui, 1995) to RGB
images. The circular separability filter outputs large
value in a round area where color is homogeneous.
The separability is calculated by scanning the
circular mask in each RGB image and the pixel with
high separability is detected as the candidate of the
traffic light. Unlike the conventional method which
calculates the circularity from the binarized region,
the proposed method can identify the traffic light
with indistinct outline and small radius.
At first, the proposed method converts the RGB
color space to the HLS color space and the region
where the saturation is low and the brightness is
extremely low or high is removed from the image.
(a) (b)
Figure 2: Preprocessing. (a) Input image. (b)
Preprocessing image.
Next, the circular mask shown in Fig.1(b) is
scanned in each RGB image while changing its
radius. The pixel with large separability is detected
as the candidate of the traffic light. The circular
separability filter has been used the pupil detection
(K. Fukui, 1988). This method used the double ring
mask shown in Fig.1(a) because the purpose is to
find the round contour regardless of its internal
pattern. This mask tends to detect the traffic sign or
the signboard as the traffic light wrongly. Finally, it
is examined whether the inactive traffic lights exist
around the candidate region. If inactive traffic lights
are detected in the right and left or top and bottom of
the candidate region, it is identified as a traffic light.
2 TRAFFIC LIGHT DETECTION
2.1 Preprocessing
The saturation of the active traffic light is usually
high. Moreover, the black region or the white region
can be excluded from the candidate of the traffic
light. Therefore, the region where the saturation is
low and the brightness is extremely low or high is
removed from the image.
The RGB color space is converted to the HLS
color space. In the HLS color space, the hue H
i
is
represented as the value between 0 and 360 degrees.
The saturation S
i
and the brightness B
i
are
represented as the value between 0 and 1. The pixel
P
i
satisfying the condition (1) is excluded from the
candidate of the traffic light.
P
i
: S
i
< THs or B
i
< THb or B
i
> 1 - THb (1)
Figure 3: Typical traffic lights in Japan.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
278

THs and THb are thresholding parameters decided
experimentally. In the experiment, THs was set to
0.33 and THb was set to 0.12. Fig.2(b) shows the
image after preprocessing. White or black areas,
e.g., clouds in the sky are removed from the input
image shown in Fig.2(a).
2.2 Circular Separability Filter
As shown in Fig.3, the frame of the traffic light is
white or black typically in Japan. Our method
detects the circular oundary between the traffic lamp
and the surrounding white or black region by the
circular separability filter. The circular mask shown
in Fig. 1 (b) consists of the inside round area R
1
and
the outside ring area R
2
. The separability η is given
by
η =
2
2
r
b
σ
σ
σ
b
2
=
()()
2
22
2
11 mm
PPnPPn −+−
σ
T
2
=
()
2
1
∑
=
−
N
i
mi
PP
,
(2)
where n
1
is the number of pixels in R
1
, n
2
is the
number of pixels in R
2
, N is the total number of n
1
and n
2
, P
i
is the intensity of the pixel i, P
1
is the
average intensity in R
1
, P
2
is the average intensity in
R
2
and P
m
is the average intensity in the total region
of R
1
and R
2
. The separability η has a value within a
range from 0.0 to 1.0. It approaches 1.0 when the
intensity between two areas changes like the step
and it approaches 0.0 when the intensity between
two areas changes gradually.
The separabirity η between R
1
and R
2
becomes large
when the intensity of the pixel in R
1
is similar, the
intensity of the pixel in R
2
is also similar and the
intensity in R
1
is different from the intensity in R
2
.
Therefore, the separability η becomes large when the
circular boundary between R
1
and R
2
corresponds to
the contour of the traffic lamp. Traffic signs or
signboards often have some textures in the inside.
The circular separability filter (Fig. 1 (b)) proposed
in this paper can suppress to detect round contours
of traffic signs or signboards wrongly.
The separability is unstable in the hue image
because hue in a white or black region is not decided
correctly. Therefore, our method calculates the
separability in each RGB image.
Figure 4: Search area.
2.3 The Candidate Region of the
Traffic Light
As shown in Fig.4, the image above the vanishing
line is divided equally into n search areas S
i
(i=1~n)
because traffic lights usually exist above the
vanishing line in an image. To search for the
candidate of the traffic light, the circular mask is
scanned in each area S
i
while changing the radius.
Far traffic lights exist in a lower area S
i
than near
ones. The radius of the traffic lamp is smaller in a
lower area S
i
. Therefore, the variable range of the
radius in a lower area is set smaller than a upper
area. In experiments, we divided the image above
the vanishing line into twenty search areas S
i
(i=1~20) as shown in Fig.4. S
1
is the top area and S
20
is the bottom area. The radius in S
1
is changed
within the range from 15 pixels to 20 pixels. On the
other hand, the radius in S
20
is changed within the
range from 4 pixels to 9 pixels. In each area S
i
,
twenty positions or less with the large separability η
are selected as the candidate region C
i
of the traffic
light. The radius of the circular mask whose
separability is the maximum is chosen as the radius
of C
i
. In Fig.5(a), candidate regions whose
separability are high are shown in purple round
regions. Some mis-detection regions appear in
candidate regions.
TRAFFIC LIGHT RECOGNITION USING CIRCULAR SEPARABILITY FILTER
279

Figure 5: Verification. (a) Candidate regions whose
separability are high. (b) Candidate regions after color
verification. (c) Candidate regions after evaluating E
S
.
Figure 6: The position of the candidate region and inactive
areas. (a) Blue in horizontal type is active. (b) Yellow in
horizontal type is active. (c) Red in horizontal type is
active. (d) Blue in vertical type is active. (e) Yellow in
vertical type is active. (f) Red in vertical type is active.
2.4 The Verification of the Candidate
Region
Each candidate region Ci is verified by color and the
existence of inactive traffic lamps.
2.4.1 Verification of color
The RGB image is converted to the HSV color space
and the average hue value H
m
is calculated in the
candidate region C
i
. The candidate region Ci not
satisfying the condition (2) is deleted from candidate
regions because the color of the traffic light is near
red, yellow, or green. It is difficult to distinguish red
or yellow by using only hue value because yellow
hue is close to red hue. Then, our method
discriminates red or yellow by using the average
blue value Rm and the average green value Gm, in
addition to Hm.
Green : 140 < H
m
< 200
Yellow : 10 < H
m
< 60 and |B
m
- G
m
| > 120
Red : 0 < H
m
< 10
10 < H
m
< 60 and |B
m
- G
m
| < 120
(3)
2.4.2 Verification of Two Neighboring
Region
If the candidate region is the true traffic light, two
inactive traffic lamps are sure to exist around the
candidate region. The arrangement of them can be
expected because the color of the active traffic lamp
has been decided by color verification. As shown in
Fig.3, there are two types of traffic lights in Japan.
One is the vertical type and the other is the
horizontal type. When the color of the candidate
region C
i
is green, inactive two lamps E
1
and E
2
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
280

exist in the right side or the upper part of C
i
as
shown in Fig.6 (a) and (d). When the color of the
candidate region C
i
is yellow, one inactive lamp E
1
exists in the left side or the lower part and another
inactive lamp E
2
exists in the right side or the upper
part, as shown in Fig.6 (b) and (e). When the color
of the candidate region C
i
is red, two inactive lamps
E
1
and E
2
exist in the left side or the lower part, as
shown in Fig.6 (c) and (f).
The location and the radius of E
1
and E
2
are
estimated from those of C
i
. In E
1
and E
2
, the circular
separability and the average brightness in the HSV
color space are examined because an inactive traffic
lamp is a round region where with low intensity.
The evaluation value K
i
given by the equation (4) is
estimated to verify the existence of the inactive
traffic lamp.
K
i
= Bη
i
+ (1 -AVb
i
) (4)
In equation (4), Bη
i
is the circular separability in
E
i
(i= 1 or 2) and AVb
i
is the average brightness in
E
i
(i= 1 or 2).
If E
i
is an inactive traffic lamp, K
i
is large
because Bη
i
of the inactive traffic lamp is large and
AVb
i
of it is small. If either K
1
or K
2
is low, this
region is excluded from the candidate regions. In
remaining candidate region, the evaluation value E
s
given by the equation (5) is estimated. The candidate
region whose E
S
is large is identified as the traffic
light.
E
s
= η + kAV
s
+ K
1
+ K
2
(5)
In equation (5), η is the circular separability of the
candidate region, k is the constant parameter larger
than 1.0, AV
s
is the average of the saturation in the
candidate region. In experiments, k was adjusted to
2.0.
Figure 5(c) shows the candidate region whose E
s
is large. Only traffic light is detected exactly.
3 EXPERIMENTS
Experiments have been conducted to recognize
various traffic lights in images captured from the on-
vehicle camera. The focal length is 16 millimeters
and the image size is 1600 × 1200 pixels. Figures 7
and 8 show some recognition results. Traffic lights
in complicated backgrounds are recognized correctly
in Fig.7 (a), (b), (c) and (d). Traffic lights at the
backlight are recognized in Fig.8 (a). It is difficult to
recognize traffic lights in Fig.8 (b), (c) and (d)
because the brightness of active lamps is very low.
Table 1: Evaluation result.
10 pixels or
more
4 pixels or
more
Detected traffic lights 47 301
The number of true positive 46 275
True positive rate(%) 97.8 91.4
The number of false positive 0 16
False positive rate(%) 0 5.3
The number of false negative 1 10
False negativerate(%) 2.2 3.3
(a)
(b)
(c)
(d)
Figure 7: Some experimental results (1).
TRAFFIC LIGHT RECOGNITION USING CIRCULAR SEPARABILITY FILTER
281
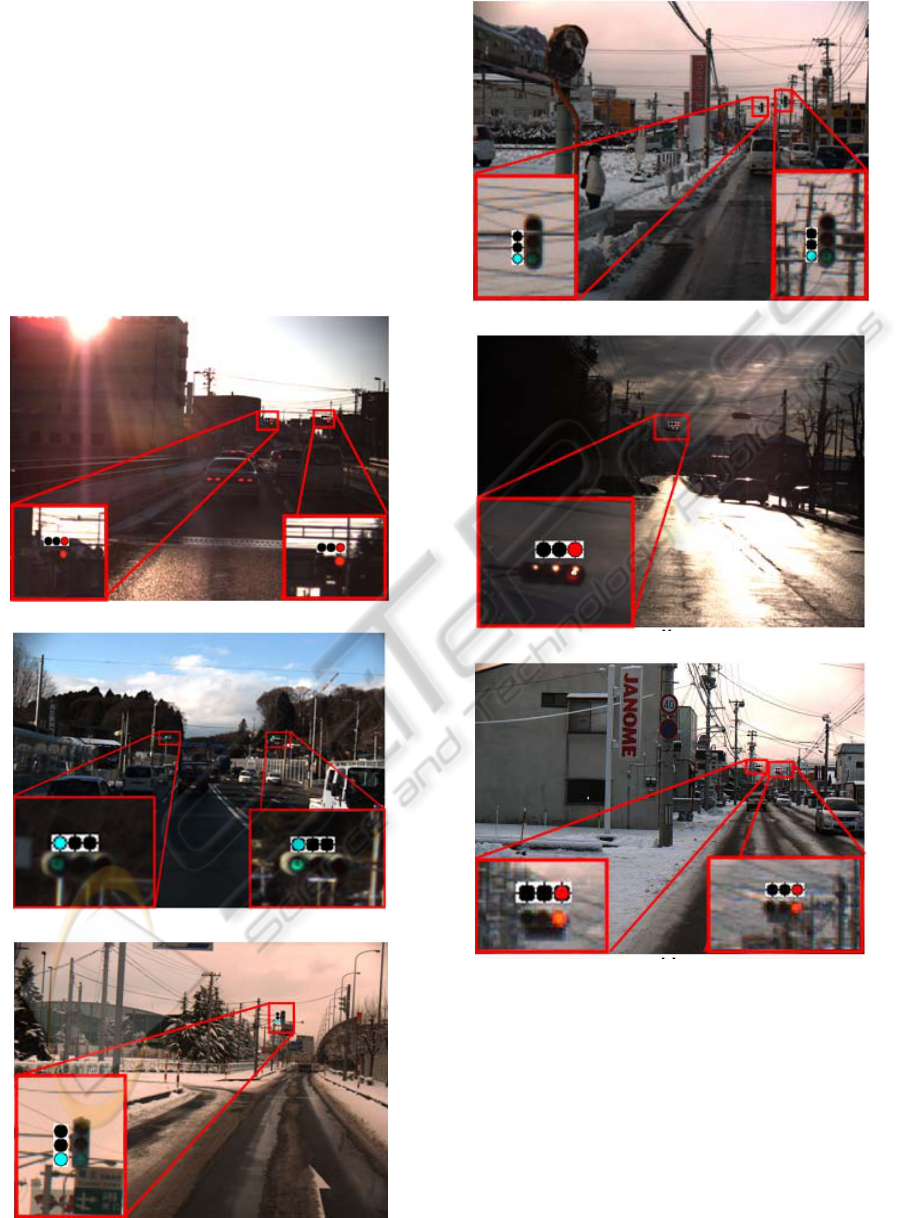
However, the proposed method can recognize them
correctly because the circular sparability catches
slight contrast between a traffic lamp and a frame
around it. In fig.8 (e), a part of the traffic light is
lacked because of the reflection caused by direct
sunshine. However, the active red light is detected
correctly. In experiments conducted under a variety
of weathers and time, active traffic lamps whose
radius are four pixels or more in images have been
recognized. Table 1 shows the evaluation result of
the proposed method. For the traffic light whose
radius is ten pixels or more, the recognition rate is
97.8%. For four pixels in a radius, it is 91.4%.
(a)
(b)
(c)
(d)
(e)
(f)
Figure 8: Some experimental results (2).
4 CONCLUSIONS
This paper proposed the method for the traffic light
recognition using the on-vehicle camera. The
candidate of the traffic light is detected by the
circular separability filter applied in each RGB
image. Unlike the conventional method using the
circularity calculated from the binarized candidate
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
282

region, the proposed method can identify the traffic
light whose outline is indistinct and whose radius is
small because the separability doesn't depend on the
intensity difference. The candidate region around
which inactive traffic lamps exist is identified as the
traffic light. In experements,we comfirmed that
traffic lights whose radius is four pixels or more
were recognized by the accuracy of 91.4 %. In the
future, we will improve the performance and the
processing time by tracking detected regions.
Moreover, the proposed method will be evaluated by
comparison with several different approaches.
This work belongs to “Development of energy
saving ITS technologies” which Hirosaki Univ.
contracted with NEDO.
REFERENCES
M. R. Yelal, S. Sai, G. R. Shaffer and A. K. Kumar,
"Color-based Signal Light Tracing in Real-time Video",
Proceedings of AVSS'06, 2006.
L. Tsinas and V. Graefe, "Real-Time Recognition of
Signaling Lights in Road Traffic". Proceedings of
MVA'96, pp.71-74, 1996.
K. Lu, C. Wang and S. Chen, "Traffic Light Recognition",
Proceedings of CVGIP'05, pp.263-270, 2005.
M. Omachi and S. Omachi, "Traffic Light Detection with
Color and Edge Information", Proceedings of
ICCSIT'09, pp.284-287, 2009.
J. Park and C. Jeong, "Real-time Signal Light Detection",
International Journal of Signal Processing, Image
Processing and Pattern Recognition, Vol.2, No.2,
pp.1-10, 2009.
D. Nienhuser, M. Drescher and J. M. Zollner, ``Visual
State Estimation of Traffic Lights using Hidden
Markov Models,'' Proceedings of ITSC2010,
pp.1705-1710, 2010.
K. Fukui and O Yamaguchi, "Facial freature point
extraction method based on combination of shape
extraction and pattern matching", Systems and
Computers in Japan, Vol. 29, No. 6, 1998 (Translated
from Denshi Joho Tsushin Gakkai Ronbunshi, Vol.
J80-D-II, No. 8, August 1997, pp. 2170.2177).
K. Fukui, "Edge Extraction Method Based on Separability
of Image Features," IEICE Transactions of
Information and Systems vol.E78-D, no.12, pp1533-
1538, 1995. 21.
A. Nakano, H. Koyasu and H. Maekawa, "Detection and
Recognition of Traffic Signal Using Machine
Learning," The Special Interest Group Notes of IPSJ,
2010-CVIM-172(26), pp. 1-7, 2010(in Japanese).
TRAFFIC LIGHT RECOGNITION USING CIRCULAR SEPARABILITY FILTER
283
