
IMPROVING THE PRE-NOTIFICATION PROTOCOL
OF THE CONTAINERS PICK-UP PROCEDURE
An Agent-based Approach
Meditya Wasesa
1,3
, Pim Nijdam
1
, Ismail Habib Muhammad
2
and Eric van Heck
3
1
Almende BV, Westerstraat 50, Rotterdam, The Netherlands
2
DEAL Services BV, Coolhaven 236, Rotterdam, The Netherlands
3
Rotterdam School of Management, Burgemeester Oudlaan 50, Rotterdam, The Netherlands
Keywords: Agent based simulation, Container Terminal.
Abstract: As the global container traffic flow is consequently increasing, the maritime container terminals (CTs) are
seeking new ways to improve their service. Taking the container import pick-up context as a test case, we
show that operational service can be improved by re-evaluating the information protocol. In this study, we
analyze and propose measures to improve the existing pre-notification approval protocol, the procedure that
bridges the CT and the incoming drayage trucks (DTs) in the container pick-up process. We put the
emphasis on the importance of considering the containers’ exact location in the pre-notification approval
request. The proposal is assessed by conducting agent based simulation experimentations. The results reveal
the opportunities to improve the CT’s performance in terms of the reshuffling frequency, the truck turn-
around time, and the average queue length at the CT’s gate-in, in favour of the proposal.
1 INTRODUCTION
The increasing container traffic has enhanced
business opportunities for all businesses that support
the supply chain, especially for the container
terminals (CT) community. Nowadays, the CTs are
expected to serve more transshipment requests
within a shorter service period. While most CT
operation problems are mitigated by focusing solely
on the physical flow analysis, this study’s main goal
is to show that operational performance can also be
increased by improving the information flow. As a
test case, we have analyzed the existing pre-
notification approval protocol for the container pick-
up process. We put the emphasis on the importance
of considering the containers’ exact location in
approving the pre-notification request sent by the
freight forwarders. By conducting agent based
simulation studies, we demonstrate that operational
performance (i.e. reshuffling frequency, truck turn-
around time, and truck queue length) can indeed be
improved by improving the information protocol.
To present the study, the paper is organized as
follows. In the next section, we discuss the related
literatures. Then, we explain the existing container
pick-up procedures. This is followed by problem
identification and the solutions proposal sections.
Then, we describe the agent based simulation setup,
present the simulation results and discussion, and list
some conclusions.
2 RELATED LITERATURE
The improvement of CT operation has received a lot
of attention from the research community. For many
years, this field has been dominated by operations
research (OR) studies (Stahlbock & Voss, 2008).
Although not as extensive as done by the mentioned
school of thought, the studies that apply Agent
Based Models (ABM) in tackling numerous CT
operations have also emerged (Davidsson et. al.,
2005). In the earliest phase, the ABM studies were
mainly focusing on the conceptual level. For
example, the work of Rebollo, et al. (2000) presents
an ABM architecture concept for solving automatic
transshipment problems for the operations of all four
of the CT’s sub systems: the marine side interface,
the transfer system, the container storage system,
and the landside interface. Another conceptual study
190
Wasesa M., Nijdam P., Habib Muhammad I. and van Heck E..
IMPROVING THE PRE-NOTIFICATION PROTOCOL OF THE CONTAINERS PICK-UP PROCEDURE - An Agent-based Approach.
DOI: 10.5220/0003742401900196
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 190-196
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
is presented by Thurston and Hu (2002). They put
forward an ABM architecture concept for handling
three different operations: the containers’ retrieval
from the stacking yard, the containers’ transportation
between the yard and the quay area, and the
containers’ transfer from the quay side to the vessel.
More recently, more validated CT-ABM studies
have emerged. These do not only propose ABM
architecture concepts for specific operation
application; validated studies normally also present
simulation works to validate their proposals
(Davidsson et. al., 2005). One good example is the
work of Henesey (2006). In his study, he presents a
thorough overview of the CT operations, proposes a
concept of ABM architecture, and elaborates on
several simulation studies focusing on numerous
operational issues such as: vessel arrival sequencing,
vessel berthing, inter-terminal transportation, etc.
Another recent work is carried out by Winikoff et.
al., (2011). They present an ABM open source
emulation platform (ContMAS) that is intended as a
decision support system for assessing different CT
policies. Moreover, in their study, they present a
negotiation-based module for container moves
allocation to the CT’s internal transporters and they
also propose a genetic-algorithm based solution for
allocating the containers in the yard.
We noted that most studies focus on the CT’s
marine interface operation (Henesey, 2006). The
landside interface operation is largely unexplored.
We have noted (only) one ABM study that analyzed
the interface operations between the CT and the land
carriers (Vidal & Huynh, 2010). Focusing on the
containers’ pick-up operation context, they have
analysed the impact of applying different yard crane
strategies to the drayage trucks’ service time. Instead
of solely focusing on the crane’s operational strategy
as was done in the study by Vidal and Huynh
(2010), we have extended their research by
concentrating more on the information protocol
improvement issue.
3 PROBLEM DESCRIPTION
The CT conducts two services: the marine interface
and the landside interface operations. The marine
interface operations are all activities that correlate
with the vessel service. The landside interface
operations deal with the service of land connecting
carriers (i.e. trains and trucks). In this study, we
focus on the CT’s landside interface operations.
More specifically, we analyze the container pick-up
process carried out by the drayage trucks (DTs).
The container pick-up process consists of two
different procedures: the pre-arrival and the on-
arrival procedures. In the following sections, we will
discuss each procedure in detail and we will discuss
the opportunity to improve operational performance
of the pick-up process by synchronizing both
procedures.
3.1 Container Pickup - Pre-arrival
Procedure
Prior to the container pick-up by the DT, the freight
forwarder has to finalize the pre-arrival formalities.
The pre-arrival procedure, which is actually a
request for pick-up confirmation, consists of several
information exchange formalities. The formalities
are regulated by the United Nations Committee for
Electronic Data Interchange for Administration,
Commerce, and Transport (UN/EDIFACT)’s
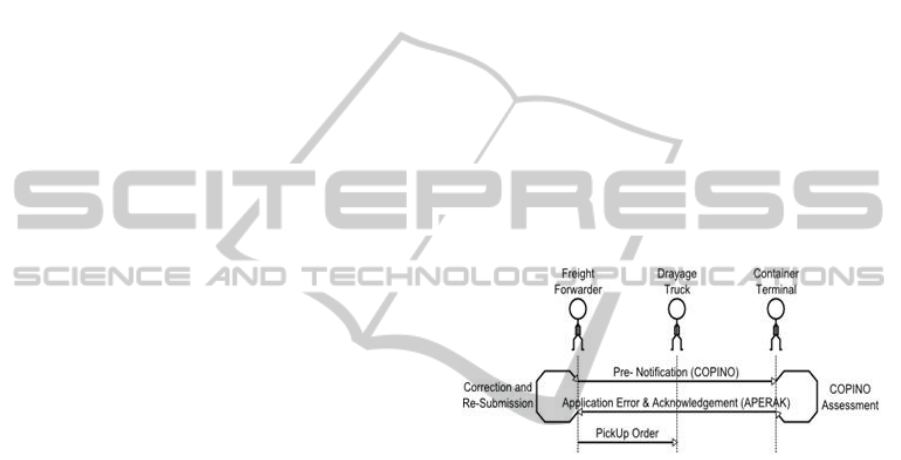
regulation. Figure 1 represents the pre-arrival
procedure.
Figure 1: Container pick-up pre-arrival procedure.
As portrayed, firstly, the freight forwarder sends
a container pick-up permission request to the CT in
the pre-notification message format, COPINO. A
COPINO message contains numerous details that
have to be completed by the freight forwarder. In
short, the COPINO confirms three important issues:
the identity of the container, the identity of the DT
that will pick up the container, and the proposed
pick-up date. Note that an incomplete COPINO form
may lead to request rejection.
Once the COPINO is received by the CT, several
checks will be carried out, including the evaluation
of the information details completeness, the presence
of the container in question at the CT, the customs
clearance procedures and some operational issues.
Once all the checks have been finalized, the CT
sends a reply message to the freight forwarder. The
reply is written in an APERAK (Application Error
and Acknowledgement) format. APERAK indicates
the approval/rejection status of the COPINO.
Upon receipt of the APERAK, if the COPINO
request has been approved, the freight forwarder can
IMPROVING THE PRE-NOTIFICATION PROTOCOL OF THE CONTAINERS PICK-UP PROCEDURE - An
Agent-based Approach
191

send an order to the DT for pick-up execution.
However, if the freight forwarder receives an
APERAK indicating COPINO rejection, a pick-up
order will not be sent. The freight forwarder might
review the reason for the rejection indicated in the
APERAK, carry out corrective actions, and re-
submit the COPINO for approval.
3.2 Container Pickup - On-arrival
Procedure
In this section, we discuss the pick-up on-arrival
operation. This procedure is only executed after
completion of the pre-arrival procedure. From the
CT’s perspective, the on-arrival procedure starts
when the DTs reach the gate-in area. As shown in
Figure 2a, especially at peak hours, the DTs
normally have to wait in a queue before receiving
service at the gate.
Whenever it is a DT’s turn, the gate-in officer
will check the DT’s documentation, ensuring that
the DT’s pick-up service request has already been
pre-registered in the CT’s EDI system (via the
COPINO-APERAK mechanism). After finalization
of the documentation check, the officer will give
permission for service, and will show the DT where
the container in question is located in the yard.
Figure 2: (a) Container pick-up operation overview
(b) A stacker crane servicing a truck.
Upon the DT’s arrival at the predefined location,
the DT will wait for the quay crane to come and
deliver the container. As shown in Figure 2b, once
the crane approaches the DT and stops at the same
row, the crane will then pick up the container from
the stack and place it on the truck’s trailer. After
delivery of the container, the truck will go to the
gate-out for the final administrative formalities
before departing from the CT.
3.3 Problem Indication
Figure 2b shows the ideal situation of a truck pick-
up service; it portrays a quay crane serving a
container that sits on top of other containers and is
right next to the DT. However, the service condition
is not always ideal. Many of the quay cranes have to
serve requests for containers that sit beneath other
containers, which results in extra work. This type of
service will occupy the quay cranes for a longer
period than the one requesting for the topmost
containers. Moreover, the request will also result in
negative consequences for the other DTs as they will
need to wait much longer in the queue. As a result,
the total DT’s turn-around time (i.e. the sum of the
waiting time and the service time) also increases.
3.4 Solution Proposal
To mitigate the inefficiencies, we propose a measure
to solve this issue. Our main concern lies with the
existing pre-arrival procedure (section 3.1). As
explained before, the approval of the pre-notification
(COPINO) request is determined by the evaluation
of two main aspects: the completeness of
information details and the presence of the container
in question. None of those aspects incorporate the
container’s exact location in the yard as an approval
criterion. Thus, we put forward a proposal to
incorporate the container’s exact location in the pre-
notification approval process. We propose that the
CT’s pick-up performance can be significantly
improved if the pre-notification approval gives
higher priority to the service requests for the
topmost containers.
Figure 3: The insertion of the synchronization module to
the existing COPINO approval system.
Responding to the stated supposition, we are
proposing to embed a synchronization (container’s
location checking) module in the existing pre-
notification approval system (see Figure 3). This
ICAART 2012 - International Conference on Agents and Artificial Intelligence
192

module will give priority to any pick-up request for
containers in the top layer. Since the introduction of
such a module may initiate several follow up
customizations in the existing EDI (electronic data
interchange) system that may cost a considerable
budget allocation, a preliminary feasibility study is
required.
4 SIMULATION SETUP
For the feasibility study, we have conducted ABM
simulations to assess the effectiveness of the
proposed synchronization module to the CT’s pick-
up key performance indicators/KPIs (i.e. reshuffling
frequency, truck turn-around time, and gate-in queue
length). We define the reshuffling frequency as the
fraction (percentage) of DT’s request services that
require reshuffle operations. The truck turn-around
time is defined as the total time spent by the DT in
the CT (i.e. the sum of the waiting time and the
service time). The gate in's queue length is defined
as the number of trucks waiting in front of the
entrance gate.
For executing the study, we have extended the
agent-based container terminal simulation platform
developed by Vidal and Huynh (2010). To align the
existing platform with our needs, we introduced
several customizations. First, in the referred
platform, 1000 containers are generated and
distributed randomly across four yard blocks at the
start of the simulation. In reality, the containers
come off the vessels continuously. Thus, we
continuously generate containers arrival during the
simulation run at 2 hour intervals (7200 ticks) to
maintain the containers’ buffer level at 1000.
Another customization concerns the crane utility
function definition. In the previous study, they
analyze the operation of the cranes that work
opportunistically based on three different utility
functions: distance based (OB-1), time based (OB-
2), and the combination of the two. Realizing the
importance of the reshuffling factor, we extended
the distance based utility by adding the extra
reshuffling consideration factor, so that the crane
will give priority to the truck that requires total
minimum crane occupation. We call this strategy the
processing-time-based utility function, OB-3 (see
equation 1).
=−
.
(
,
)
+
.
+
.
+
.
(
,
)
(1)
where:
=
= ℎ.
(,)
= ℎℎℎ.
= ℎ.
= ℎ.
= ℎ.
= ℎ.
= .
= ℎℎℎ?
= ?
= ℎℎ?
= ℎ?
The final important customization is the
implementation of the pre-notification
synchronization concept. While in Vidal and Huynh
(2010), the incoming trucks request random
containers regardless of their position, in our study
we introduce the synchronization policy (i.e.
assigning the requests of the incoming trucks to the
topmost containers). The share of trucks that follow
the synchronization policy is controlled by the sync
platform utilization variable. Sync platform
utilization of 100% means that all incoming trucks
obey the proposed policy, thus only those requesting
the topmost containers will be served. On the other
hand, sync platform utilization of 0% reflects the
existing situation, where the pre-notification
approval is given regardless of the container’s
position in the yard.
Recall that our main interest is to analyze the
impact of applying the pre-notification
synchronization concept to the CT’s performance. In
response, we test the performance of the system at
three levels of sync platform utilization: 0%, 50%,
and 100%. To test the system’s performance under
different levels of occupation, we set different levels
for the CT’s workload by simulating 4 truck arrival
rate alternatives. In addition, we are also interested
in comparing the performance of different crane’s
working modes (i.e. OB-1, OB-2, and OB-3). In this
study, each crane agent will work opportunistically.
In total, we run 4*3*3 experiment set-ups (see
Table 1). Each experiment run lasts for 201,600
ticks (7 working days). We treat the first 57,600
ticks (2 days) as the warm-up period. In addition, we
employ 4 cranes, so that each crane will be
responsible for one container block area (see Figure
2a). Note that other than the customizations stated in
this paper, all simulation set-up details are similar to
the benchmark paper.
IMPROVING THE PRE-NOTIFICATION PROTOCOL OF THE CONTAINERS PICK-UP PROCEDURE - An
Agent-based Approach
193

Table 1: Simulation scenario.
Control
Variable
Setup Unit
Simulation
Length
201,600 Ticks
Warm-up
Period
28,800 Ticks
Sync
Platform
Utilization
0, 50, 100 %
Truck
Arrival
0.25, 0.50, 0.75, 1 Trucks/ Minute
Crane’s
Utility
Function
Distance Based (OB-1),
Time Based (OB-2),
Processing-Time Based
(OB-3)
5 SIMULATION RESULTS
Figure 4 indicates the impact of applying the pre-
notification synchronization module to the
reshuffling probability at different levels of
utilization and different experimentation conditions.
Without the application of the module (i.e. platform
utilization of 0%), the reshuffling probability per
container service is more than 40%. The ideal
situation with a sync platform utilization of 100%
will decrease the reshuffling probability to less than
1%. The mentioned situation is idealistic of course;
however, as the results indicate, by applying the
proposed module at only 50% use, we will have an
opportunity to decrease the reshuffling probability
between 23% and 30%, regardless of the CT’s
occupation level (i.e. truck arrival rate) and the
crane’s utility function.
Figure 4: The impact of synchronization module
utilization on the reshuffling frequency.
The application of the synchronization module
will also improve the CT’s performance in terms of
the truck’s turn-around time and the queue length in
front of the gate in area. As shown in Figure 5 and
Figure 6, the level of improvement increases as the
truck arrival rate goes up. This means that the
proposed platform offers bigger improvements when
the CT’s workload is high. As indicated also, the
improvement magnitude grows even higher when
the CT applies the OB-2 operational policy to the
yard cranes. Recall that the OB-2 is indeed the
existing crane strategy that is based on a first-in-
first-out policy. At an extremely busy day (i.e. truck
arrival = 1 truck per minute), if we apply the
location synchronization module to the existing
system (OB-2), we can improve the truck’s turn-
around time from 30 minutes to less than 12.5
minutes. The improvement in the truck turn-around
time is consequently accompanied with the queue
length reduction also (see Figure 6).
Figure 5: The impact of synchronization module
utilization on the truck’s turn-around time.
In comparison with the time based crane
operation (OB-2), the distance based (OB-1) and the
processing time based (OB-3), are more robust in
coping with the CT’s occupational intensity
fluctuation. For both utility functions, as the truck
arrival rate is increasing, the truck’s turn-around
time and the queue length is increasing moderately.
Although both non-time based utility functions are
already robust to the increase of CT’s workload, the
synchronization module application still brings
considerable improvements at any level of
occupancy. In general at each experimental
condition setup, higher module utilization indicates
better CT’s performance.
Platform Utilization
(
%
)
Trucks Turn Arround Time (Minutes)
5
10
15
20
25
30
5
10
15
20
25
30
5
10
15
20
25
30
TA = 0.25 tr/min
0 50 100
TA = 0.50 tr/min
050100
TA = 0.75 tr/min
0 50 100
TA = 1.00 tr/min
0 50 100
OB-1 OB-2 OB-3
ICAART 2012 - International Conference on Agents and Artificial Intelligence
194

Figure 6: The impact of synchronization module
utilization on the trucks’ queue length.
6 DISCUSSION
Although the application of the synchronization
module application is delivering better CT’s
performance at any experimental setup, the
implementation of the processing time based crane
strategy, OB-3, does not deliver considerable
improvement in comparison with the distance based
strategy, OB-1. This is contrary to our previous
conjecture. We expect that by applying a crane’s
strategy which considers the holistic processing
time, we will gain a better performance than
applying the crane’s strategy that omits the
importance of the reshuffling activity.
Triggered by this question, we re-evaluated the
simulation result data log and did an assessment to
the time fraction that is spent by the yard cranes for
conducting each activity (i.e. idle, travelling,
reshuffling, and servicing).
As we analyse the activities composition (Figure
7), we remark that the time spent in conducting the
reshuffling activities is surprisingly small. At high
occupation level (e.g. 1 truck per minute), the cranes
are allocating not more than 7.5 % of their time for
operationalizing reshuffling activities. The number
shrinks even lower when the truck arrival rate
plummets and the sync module utilization increases.
In addition, if we set the module utilization near to
100%, in principal there will be no (less) pick up
requests that require reshuffling activity. In this
situation, the introduction of the reshuffling factor
applied in the processing-time based strategy will
have diminishing impact in comparison with the
distance based crane strategy.
Figure 7: The overview of the yard cranes’ activity.
7 CONCLUSIONS
In this study we analyze and propose the application
of a synchronization module to improve the existing
pre-notification approval protocol. We do
preliminary study to assess the impact of applying a
synchronization module to the CT’s performance by
conducting agent based simulation. The results
reveal opportunities to improve numerous CT’s
performance by considering the container’s physical
location in the CT’s pre-notification protocol. In this
study we also introduce and assess the new
processing time based crane operation strategy that
behaves equally well with the distance based crane
strategy.
REFERENCES
Davidsson, P., et al., An Analysis of Agent based
Approaches to Transport Logistics. Transportation
Research Part C: Emerging Technologies, 2005.
13(4): p. 255-271.
Henesey, L. E., Multi Agent Systems for Container
Terminal Management, in Department of Systems and
Software Engineering. 2006, Blekinge Institute of
Technology: Blekinge. p. 1-275.
Rebollo, M., et al., A Multi Agent System for the
Automation of a Port Container Terminal.
Proceedings of Autonomous Agents: Workshop on
Agents in Industry, 2000: p. 1-6.
Stahlbock, R. and S. Voss, Operations Research at
Container Terminals: a Literature Update. OR
Spectrum, 2008. 30(1): p. 1-52.
IMPROVING THE PRE-NOTIFICATION PROTOCOL OF THE CONTAINERS PICK-UP PROCEDURE - An
Agent-based Approach
195

Thurston, T. and H. Hu. Distributed Agent Architecture
for Port Automation. in Proceedings of the 26th
Annual International Computer Software and
Applications Conference (COMPSAC '02). 2002.
Oxford, United Kingdom: IEEE Computer Society.
Vidal, J. M. and N. Huynh, Building Agent Based Model
of Seaport Container Terminals. Proceedings of 6th
Workshop on Agents in Traffic and Transportation,
2010: p. 1-10.
Winikoff, M., et al., Agent-Based Container Terminal
Optimisation. Proceedings of the Tenth International
Conference on Autonomous Agents and Multiagent
Systems, 2011: p. 1-9.
Wooldridge, M., Responding to Real-World Complexity:
Introduction to Multi-Agent Technology. A Magenta
Technology Whitepaper, 2007: p. 1-15.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
196
