
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH
ACTIVE CONTOURS
Laura Brandolini and Marco Piastra
Computer Vision and Multimedia Lab, Universit`a degli Studi di Pavia, via Ferrata 1, 27100 Pavia, Italy
Keywords:
Reeb graph, Active contours, Triangle mesh, Segmentation.
Abstract:
This paper illustrates a novel method to compute the Reeb graph for triangle meshes. The algorithm is based
on the definition of discrete, active contours as counterparts of continuous level lines. Active contours are
made up of edges and vertices with multiple presence and implicitly maintain a faithful representation of the
level lines, even in case of coarse meshes with higher genus. This approach gives a great advantage in the
identification of the nodes in the Reeb graph and also improves the overall efficiency of the algorithm in that at
each step only the information local to the contours and their immediate neighborhood needs to be processed.
The validation of functional integrity for the algorithm has been carried out experimentally, with real-world
data, without mesh pre-processing.
1 INTRODUCTION
Reeb graphs are compact shape descriptors that play
a fundamental role in different fields of computer
graphics: shape matching and encoding (Sebastian
et al., 2002; Sundar et al., 2003), mesh deformation
(Tierny et al., 2006; Schaefer and Yuksel, 2007), 3D
search (Hilaga et al., 2001), mesh compression (Bia-
sotti et al., 2000), medical imaging and several other
fields. Reeb graphs enclose important shape prop-
erties like connectivity, length, width, direction and
genus in a faithful fashion.
This paper illustrates a new robust method for con-
structing Reeb graphs for 2-manifold, triangle meshes
using a predefined Morse function. In the literature
there are other methods for Reeb graphs extraction,
as it will be described in Section 3. In Section 4
we propose an approach in which the Reeb graph is
constructed incrementally by evolving discrete, active
contours overthe mesh, starting from relevantminima
of the Morse function. A key aspect in the active con-
tours proposed is that both vertices and edges could
have a multiple presence and this allows a faithful
representation of the level lines of the Morse function
even when these lines are too close to each other with
respect to mesh sampling.
Experimental evidence, illustrated in Section 5,
shows that this algorithm is effective with real-world
data, without the need of pre-processing, and there-
fore suitable for practical applications.
2 THEORETICAL PRELUDE
Morse theory (Milnor, 1963) is a classical mathemat-
ical approach that has found many applications in the
field of computationaltopology. The Morse function f
is a real-valued function defined on a compact smooth
manifold M (Biasotti et al., 2008). A point x of M
where all the partial derivatives of f are zero is a crit-
ical point. A critical point x is non-degenerate if the
matrix of second order partial derivatives (Hessian)
of f at x is non-singular. A non-degenerate critical
point can only be a maximum, a minimum or a sad-
dle, while other points are called regular. We can
then define a Morse function as a smooth function f
defined on M that has no degenerate critical points.
The function f is frequently required to be simple,
i.e. f(x) 6= f(y) for any pair x and y of distinct crit-
ical points.
Reeb graphs have been defined by George Reeb in
1946 (Reeb, 1946). Given a compact, smooth mani-
fold M and a Morse function f defined on it, the Reeb
graph “is the quotient space defined by the equiva-
lence relation that identifies the points belonging to
the same connected component of the level-set of f”.
Each point in a Reeb graph corresponds to a con-
nected component of a level set of the Morse function
f. In particular, each point of the arcs in the graph cor-
responds to a regular value of f, whereas each node
corresponds to a critical value of f. Reeb graphs are
compact shape descriptors which convey topological
80
Brandolini L. and Piastra M. (2012).
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 80-89
DOI: 10.5220/0003745500800089
Copyright
c
SciTePress

informationabout the shape of the manifold M. In par-
ticular for orientable, closed 2-manifolds the number
of loops in the Reeb graph corresponds to the genus of
the manifold (Cole-McLaughlin et al., 2003) and this
property does not depend on the choice of the Morse
function f.
(a) (b)
Figure 1: A discrete Morse function with two minima (see
text) (a); the corresponding discrete Reeb graph (in red),
where the nodes are emphasized in orange (b).
3 RELATED WORK
Reeb graphs have been extensively applied in recent
years in different fields of computer science, thus a
complete exploration of all the contributions about
this matter is beyond the scope of this paper. De-
tailed works on the subject of Reeb graphs for shape
analysis can be found in (Biasotti et al., 2008). The
introduction of Reeb graphs in computer graphics is
due to (Shinagawa et al., 1991) and the first algo-
rithm to automatically compute Reeb graphs is de-
scribed in (Shinagawa and Kunii, 1991). This algo-
rithm automatically constructs the Reeb graph of a
2D manifold surface embedded in 3D using surface
contours, a weight function and an a priori knowl-
edge of the number of holes of the object. In their
work (Lazarus and Verroust, 1999) describe an algo-
rithm that constructs level-set diagrams for 0-genus
polyhedrons using geodesic distance from a source
point. (Tierny et al., 2006) propose a smart approach
based on a good choice of the Morse function f, tak-
ing feature points as the origin of function f, but the
strategy adopted for evolving contours leads to critical
contour configurations, especially in case of coarse,
real-world meshes. (Pascucci et al., 2007) propose an
on-line algorithm for Reeb graphs construction and
test its performance with different Morse functions.
Their algorithm has an iterative approach that requires
taking into account all the simplicial elements of the
mesh (vertices, edges and triangles) during the com-
putation: at each step, a new simplicial element is
considered and the Reeb graph is incrementally up-
dated, until all simplicial elements have been con-
sidered. (Shapira et al., 2008) propose an algorithm
for mesh decomposition and skeletonization using a
shape diameter function (SDF), i.e. a scalar func-
tion defined on mesh faces. This technique is pose-
invariant in general, but there are positions for which
smoothing and filtering are necessary. In (Edelsbrun-
ner et al., 2008) an algorithm is presented to calculate
the Reeb graph of a time-varying continuous function
defined in the tridimensional space. They give also
a classification of the combinatorial changes in the
evolution of the Reeb graph of a time-varying Morse
function. (Doraiswamy and Natarajan, 2009) propose
an approach for computing Reeb graphs with the use
of dynamic graphs, but also in this case a global sort-
ing step is needed to start the computation. A work by
(Berretti et al., 2009) proposes a 3D mesh segmenta-
tion using Reeb graphs. As in (Hilaga et al., 2001) this
work uses AGD (average geodesic distance) calcu-
lated from a small set of evenly-spaced vertices (base
vertices) and this choice leads to inaccurate results
with certain type of meshes. (Patane et al., 2009)
propose an approach for building the Reeb graph of
a mesh using critical points and their isocontours,
which is particularly suited for large meshes with
small genus and really smooth functions (with a small
number of critical points), but is not suited for coarse
meshes with higher genus.
4 THE ALGORITHM
A key aspect in the algorithm proposed are active con-
tours, namely ensembles of vertices and edges with
possible multiple presence, that represent the level
lines of the Morse function.
On a 2-manifold and away from critical points,
each level line is a 1-manifold, possibly with more
than one connected component, which become ei-
ther a point or a self-intersecting line when critical
points are met. The representation of each connected
component by an active contour relies on the multi-
ple presence of vertices and edges in order to pre-
serve such 1-manifoldness for all regular values. In
fact, when the mesh is coarse, the immediate dis-
crete representation would not be a 1-manifold (see
for instance Figures 3(a) and 4(a)). In addition, as
we will see, the multiple presence of vertices in ac-
tive contours simplifies the detection of saddles, i.e.
where active contours either split or merge. Indeed,
as it will be seen later on, in our algorithm split and
merge events can only occur with vertices with pres-
ence greater than 1 in either the same contour (split)
or in two different contours (merge). The mesh seg-
mentation is generated as a by-product, by associating
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS
81

to each active contour a segment, which is closed and
created anew whenever a critical point is met.
The overall algorithm can be summarised as fol-
lows:
• compute the values of the Morse function for each
vertex;
• identify the prominent points of the mesh - i.e.
feature points - each corresponding to relevant
minima in the Morse function;
• initialize an active contour at each feature point;
• evolve incrementally all the active contours in the
direction of increasing values of the Morse func-
tion;
• perform either split or merge operations each time
a critical point is detected (see Figure 1(b));
• terminate the execution when all active contours
have reached a maximum.
4.1 Which Morse Function
We opted for the same Morse function adopted in
(Tierny et al., 2006). This particular function is bound
to intrinsic shape properties, as described in the above
paper, and therefore is both robust in front of variation
in mesh sampling and invariant to mesh rotation and
deformation.
The Morse function in point is based on the con-
cept of geodesic distance on a mesh (Novotni et al.,
2002), meant as the length of the shortest path con-
necting each two vertices. A derived concept is that of
diameter vertices: i.e. a pair of vertices that are at the
maximum geodesic distance on the mesh. A pair of
diameter vertices can be found with a recursive algo-
rithm, as illustrated in (Lazarus and Verroust, 1999).
The Morse function is computed through the fol-
lowing steps:
• find the two diameter vertices (see above) and
calculate the two distance functions from these
points with the Dijkstra algorithm (Dijkstra,
1959);
• find the local maxima and minima of the two dis-
tance functions, i.e. the local extrema;
• identify the feature points (FP) by merging local
extrema with some tolerance (see below);
• calculate the Morse function, defined as the
geodesic distance between each vertex and the
closest FP, with the Dijkstra algorithm.
4.1.1 Find Diameter Vertices and Mesh
Maximum Distance
The algorithm randomly chooses a starting vertex in
the mesh and sets it as the currentVertex. Then it cal-
culates the distance map, with the Dijkstra algorithm,
and finds the most distant vertex. The latter is selected
as the next currentVertex and the algorithm repeats it-
self until currentVertex and its most distant vertex in
2 consecutive loops coincide. We call these two ver-
tices diameter vertices V1 and V2 respectively. It is
worth highlighting that this method is fairly robust in
practise, in that the resulting diameter vertices depend
only weakly on the choice of the starting vertex.
The two diameter vertices define two distance
functions:
• δ
1
: the distance from diameter vertex V1
• δ
2
: the distance from diameter vertex V2
The distance between the couple of points V1 and
V2 is defined as the maxDistance and will be used
to normalize all distances in the mesh. In this way
the value of the parameters in the algorithm will be
independent from the actual size of the mesh.
4.1.2 Identification of Feature Points
Feature points (FP) are usually defined in the liter-
ature (Mortara and Patane, 2002) (Katz et al., 2005)
(Tierny et al., 2006) as the vertices in the mesh that are
furthest away from every other mesh vertex. Typically
they are located on mesh prominent components.
(a) (b)
Figure 2: Feature points (in red) (a) and the resulting dis-
tance function δ (b).
Following (Tierny et al., 2006) we identify fea-
ture points by merging the local extrema of the two
distance functions δ
1
and δ
2
. Local minima and lo-
cal maxima from either functions that are not farther
away than a certain predefined tolerance value rein-
force each other and are merged in a common feature
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
82

point, whereas isolated extrema are simply discarded
(see Figure 2(a)).
4.1.3 The Morse Function
The Morse function of our choice is defined as the
normalized geodesic distance between each vertex
and the closest feature point (see Figure 2(b)). In
agreement with (Tierny et al., 2006) we also perform
a post-processing step in order to ensure that no two
vertices have the same value of the Morse function.
4.2 Computing the Reeb Graph
4.2.1 Discrete Contours as Multisets
In a theoreticalframework, a Morse function f defined
on a continuous and smooth surface implicitly defines
level lines that join all the points at the same value of
f. In our context, the Morse function f is defined only
at mesh vertices and, per choice, the discrete repre-
sentation of level lines is made only of mesh edges
and vertices. Besides the loss of precision, which is
easily addressable, a critical problem is that the dis-
crete representation of a level line might no longer
be 1-manifold. As a matter of fact, this problems
occurs frequently on coarse meshes (see Figure 3(a)-
4(a)). In order to solve this we borrow an idea from
(Edelsbrunner et al., 2003) in that we introduce multi-
ple presence of both edges and vertices in the discrete
representation of level lines.
(a) (b)
Figure 3: The continuous level line - in red - is a 1-manifold,
while its discrete representation is not (a). In the represen-
tation with multiple presence (double vertices and edges -
in green) the 1-manifoldness of the level line is implicitly
maintained (b).
(a) (b)
Figure 4: In this case the discrete representation with mul-
tiple presence maintains the 1-manifoldness of each corre-
sponding level lines.
In other words, what we will call in the following
an active contour γ, is made of two multisets (Knuth,
1998) of vertices and edges respectively.
As shown in Figures 3(b) and 4(b), active contours
maintain the representation of discrete contours faith-
ful with respect to the continuous level lines.
Due to obvious topological reasons, in a triangle
mesh, the vertices with multiple presence can only
exist in an active contour in a fixed number of pat-
terns, as represented in Figures 5,6,7. These figures
describe all the possible, base configurations of a seg-
ment of the discrete contour, with multiple presence
of vertices up to 3 and multiple presence of edges up
to 2.
p=2
p=1
(a)
p=1
p=1
p=1
(b)
Figure 5: The catalog of all possible configurations of one
vertex with presence 1 in a contour.
p=2
p=2
(a)
p=2
p=1
p=2
p=1
(b) (c)
Figure 6: The catalog of all possible configurations of one
vertex with presence 2 in a contour.
p=3
p=2
p=2
p=2
(a)
p=3
p=2
p=2
(b)
p=3
p=2
(c)
p=3
p=1
p=1
p=1
p=1
p=1
p=1
(d)
Figure 7: The catalog of all possible configurations of one
vertex with presence 3 in a contour.
In our experience, with meshes up to genus 22,
we found no evidence of presences higher than the
ones above. We suspect the existence of a theoretical
limit about those values, given suitable quality con-
ditions for the mesh. In any case multiple presences
with greater values could be accommodated by mod-
ifying the algorithm accordingly.
The multiple presence of vertices and edges re-
sults in a great advantage in detecting split or merge
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS
83
events. Indeed, as it will be shown in 4.2.3, split and
merge events can only occur at vertices with presence
greater than 1.
4.2.2 The Main Algorithm
Initially all feature points become an active contour
and active contours evolve in a way that is shown in
detail in Algorithm 4.1.
There are two crucial events in contour evolution:
Split: when a single contour separates in two differ-
ent, disconnected contours.
Merge: when two contours melt in one unique, con-
nected contour.
Active contours γ sweep the mesh, following the
direction of ascending values of the Morse function.
γ is made of two multisets:
• V: active contours vertices
• E: active contours edges
The ensemble of segments σ is extracted during
the evolution of active contours. Each segment σ is
made of:
• γ: the active contour of the segment (used in read-
write for segmentation)
• V: the visited vertices of the segment (used as
write-only repository during segmentation)
The set that collects all active segments is called
Σ. Once an event occurs (either merge or split) the
active segments involved are closed and stored in Σ
c
,
the set of segments that have already been closed.
4.2.3 Evolution of Active Contours
In the main loop, at each step, a candidate vertex v
c
is
selected as the one with the lowest value of the Morse
function in all active contours.
σ = nearest(Σ), v
c
= nearest(σ.γ) (1)
The algorithm first checks the presence of the can-
didate vertex v
c
in the active contour, as a presence
greater than one would reveal a split event, then it
checks for the presence of v
c
in other contours, in
order to detect a merge event. Then the contour is
updated locally.
This operation is described in detail in Algorithm
4.2 and illustrated in Figure 8. In the description that
follows we use the concepts of star and link of a ver-
tex in a simplicial complex - see for instance (Edels-
brunner, 2001) for details. In the basic step of con-
tour evolution, the star of v
c
on the contour (see Fig-
ure 8(a)) is replaced by a subset of the link of v
c
on the
mesh (see Figure 8(b)), in the direction of advance-
ment. More precisely, the replacing subset of the link
of v
c
on the mesh, which we call the link
+
, has a fairly
subtle definition. The link of v
c
is divided by the ver-
tices that also belong to the active contour into con-
nected subsets. By definition, the link
+
is obtained
by subtracting from the link of v
c
all the connected
components that contain at least one vertex having a
value of the Morse function which is lower than the
one on v
c
.
link
+
-
-
+
+
+
+
v
c
(a)
-
-
+
+
+
+
v
c
(b)
Figure 8: Local update of the contour: the star of v
c
on the
contour (a) is replaced by the link
+
, i.e. a subset of the link
of v
c
on the mesh (b).
4.2.4 Finding Connected Components
If each active contour was composed only of vertices
and edges with a single presence, the separation of
connected subsets would be straightforward.
The multiple presence of both edges and vertices
makes the problem more complex, as shown in Fig-
ure 9. In particular, when visiting the double branch
(i.e. the green segment containing double presence
edges and vertices) from one side, it is crucial to exit
from “the right side” of the contour, i.e. without
crossing over. In our method it is possible to discrim-
a
b
a
-
a
-
a
+
(a)
c
d
i
e
f
(b)
Figure 9: Finding connected components in an active con-
tour: how to walk a double branch.
inate the direction to be kept by inspecting the val-
ues of the Morse function in the local neighborhoods.
In Figure 9(a) we identify the subset of the link (in
blue) of an entrance vertex a, as the one being delim-
ited by two contour vertices and containing the vertex
that is the intersection between the link of the vertex a
and the subsequent vertex b, with a lower value of the
Morse function and not belonging to the active con-
tour. This lets us determine by intersection the right
subset (in violet) of the link of the subsequent vertex
b. The procedure can be repeated until the entire dou-
ble branch has been visited. Figure 9(b) shows that
the visiting procedure exits from the right side in that
it properly selects vertex e over vertex f as the exit
vertex.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
84

Algorithm 4.1: SEGMENTATION(FPs)
main
INITIALIZE(FPs)
while not(Σ =
/
0)
σ = nearest(Σ), v
c
= nearest(σ.γ)
if presence(v
c
, σ.γ) > 1
then SPLIT(v
c
, σ)
else
if ∃σ
1
: v
c
∈ σ
1
.γ
then MERGE(σ, σ
1
)
else ADVANCECONTOUR(v
c
, σ)
procedure INITIALIZE(FPs)
Σ, Σ
c
= {
/
0}
for each fp ∈ FPs
do
σ = new(σ)
σ.γ.V = σ.γ.V ∪ {fp}
σ.V = σ.V ∪ {fp}
Σ = Σ∪ σ
procedure ADVANCECONTOUR(v
c
, σ)
linkPlus = FINDLINKPLUS(v
c
, σ.γ)
σ
updated
= updateContour(σ, v
c
, linkPlus)
removeFolds(σ
updated
.γ)
Σ = Σ∪ σ
updated
− σ
procedure MERGE(σ
1
, σ
2
)
σ
merged
.γ.V = σ
1
.γ.V ∪ σ
2
.γ.V
σ
merged
.γ.E = σ
1
.γ.E ∪ σ
2
.γ.E
linkPlus = FINDLINKPLUS(v
c
, σ
merged
.γ)
σ
updated
= updateContour(σ
merged
, v
c
, linkPlus)
removeFolds(σ
updated
.γ)
setAdjacence(σ
1
, σ
updated
)
setAdjacence(σ
2
, σ
updated
)
Σ
c
= Σ
c
∪ {σ
1
, σ
2
}
Σ = Σ∪ σ
updated
− {σ
1
, σ
2
}
Γ = connectedComponents(σ
updated
.γ)
if Γ.size > 1
then
σ
a
= splitSegment(σ
updated
, Γ[0])
σ
b
= splitSegment(σ
updated
, Γ[1])
setAdjacence(σ
a
, σ
updated
)
setAdjacence(σ
b
, σ
updated
)
Σ = Σ∪ {σ
a
, σ
b
} − σ
updated
Σ
c
= Σ
c
∪ σ
updated
procedure SPLIT(v
c
, σ)
linkPlus = FINDLINKPLUS(v
c
, σ.γ)
σ
updated
= updateContour(σ, v
c
, linkPlus)
removeFolds(σ
updated
.γ)
Γ = connectedComponents(σ
updated
.γ)
if Γ.size > 1
then
σ
1
= splitSegment(σ, Γ[0])
σ
2
= splitSegment(σ, Γ[1])
setAdjacence(σ
1
, σ)
setAdjacence(σ
2
, σ)
Σ
c
= Σ
c
∪ {σ}
Σ = Σ∪ {σ
1
, σ
2
} − σ
else Σ = Σ∪ σ
updated
− σ
Algorithm 4.2: FINDLINKPLUS(v
c
, γ)
main
link = findLink(v
c
)
adjacents = findAdjacent(v
c
, γ)
link.V = link.V − adjacents
stack =
/
0
for each presence(v
c
, γ)
do
v
0
= FINDPREDECESSOR(link.V)
if δ(v
0
) > δ(v
c
)
then break
stack = stack+ v
0
while not (stack =
/
0)
do
intersections = getLinkIntersections(v
0
, v
c
)
for each v
i
∈ intersections
do
if (v
i
∈ link.V) and not (v
i
∈ stack))
then stack = stack+ v
i
link.V = link.V − v
0
stack = stack− v
0
v
0
= next(stack)
for each v
a
∈ adjacents
do
edge = findEdgeConnecting(v
a
, v
c
)
if presence(edge, γ) > 1
then adjacents = adjacents− (v
a
)
for each edge ∈ link.E
do
if not ((edge.start or edge.end) ∈ link.V) or
not ((edge.start or edge.end) ∈ adjacents)
then link.E = link.E − edge
return (new(γ(link))
procedure FINDPREDECESSOR(link)
predecessor =
/
0, d = ∞
for each v ∈ link
do
if δ(v) < d
then
d = δ(v)
predecessor = v
return (predecessor)
4.2.5 Contour Split
The first condition to be checked for in order to detect
split events is the multiple presence of v
c
in the active
contour (see Figure 10). Only when this condition
occurs the entire active contour is explored, in order
to isolate the connected sub-components.
When dealing in particular with coarse meshes
with high genus, split and merge events can occur
with high frequency and, omitting details, the result-
ing segments could be either fragmented or not sim-
ply connected. For this reason, after having detected
a split event, it is important to determine which seg-
ment each contour vertex will belong after the split.
In our method, after a split event, each of the two new
segments will contain a connected subset of the split-
ting contour; this same connected subset is deemed
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS
85

(a) (b)
Figure 10: Split event: the candidate vertex v
c
(in orange)
has a double presence in the active contour (a); the contour
is split into two distinct ones (b).
the originating vertices of the segment. As a mat-
ter of fact, it can happen that the active contour γ
that is splitting could contain one or more vertices
belongings to the originating vertices of its own seg-
ment σ. If those vertices were simply passed to the
two new segments, interruptions could be generated
and the connectedness of the previous segment could
be compromised. For this reason we introduce the
idea of multiple vertex membership: vertices belong-
ing to the originating vertices of a segment, if passed
to other segments, will be marked as belongings to
all involved segments. Figure 11 shows an example
of multiple vertex membership: vertices with multiple
membership are highlighted with a different border
color. Inside vertex color represents parent segment
belonging, border color represents child segment be-
longing. Higher level of sharing (e.g. vertices shared
between three or more segments) can occur in practise
for coarse meshes with higher genus.
Figure 11: Vertices with multiple membership are in the
highlighted areas in red.
4.2.6 Merge Between Contours
In analogy of the case of the split, the fundamental
condition to be checked for in order to detect the oc-
currence of the merge event is the simultaneous pres-
ence of v
c
in two contours (see Figure 12). When
this is true, the two merging segments σ
1
and σ
2
are
closed and stored in Σ
c
and a new segment σ
merged
is
created. The merged active contour will also repre-
sent the originating vertices for the segment σ
merged
.
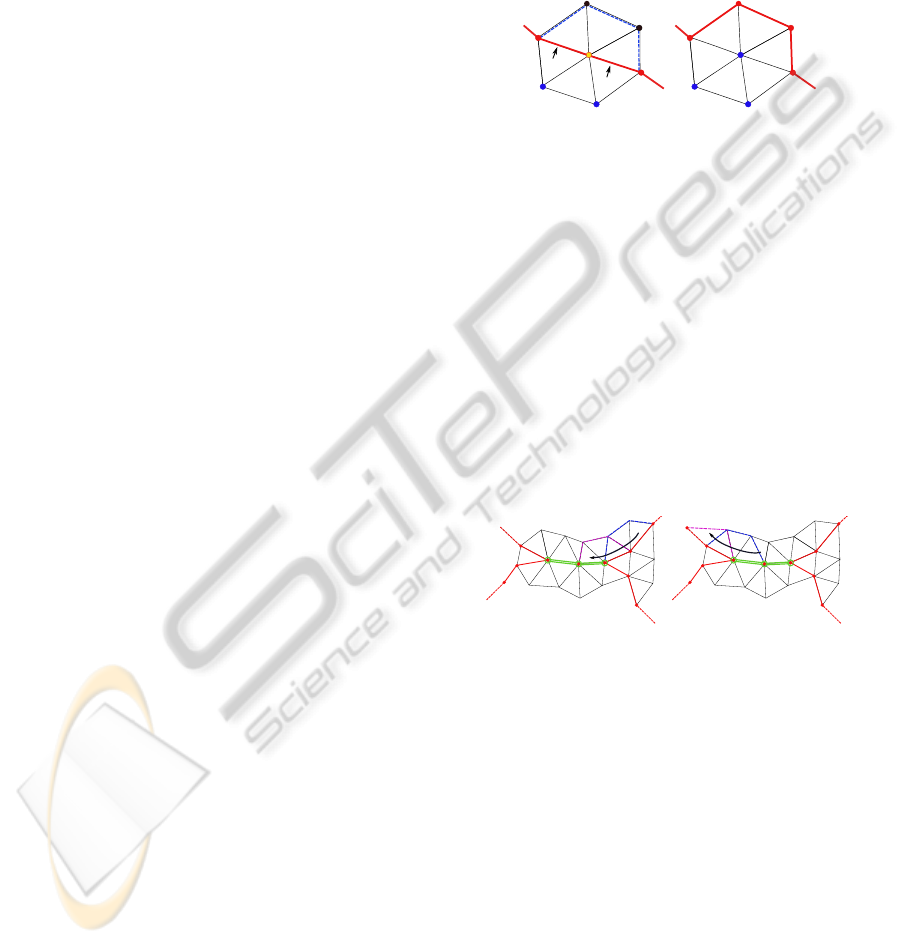
4.2.7 Removing Folds
One of the real plagues of Morse functions, dis-
cretized in the way here described, is the presence
(a) (b)
Figure 12: Merge event: the candidate vertex v
c
(in orange)
belongs to two distinct contours (a); the two distinct con-
tours are merged into one (b).
of multiple, spurious, local saddles, as analyzed in
(Tierny et al., 2006). The algorithm could originate
false splits when encountering those spurious saddles
(see Figure 13). Indeed, in those cases, if we actu-
ally made a split, we would produce “anomalous con-
tours”, composed only by individual isolated vertices
or contours where every edge would have a presence
greater than one. We named situations like the one
described in Figure 13 as contour folds and in our al-
gorithm they are removed as soon as they occurs. Al-
though we do not have a theoretical proof of the com-
pleteness of this solution, we tested it extensively and
in our experimental evidence it solved the problem of
spurious saddles completely. As shown in Figure 14
the check for fold presence can be performed once
again in the basic step of active contour evolution: a
fold is certainly present whenever a vertex with a sin-
gle presence is connected with an edge with double
presence. The fold-removing procedure is recursive
in that it follows the fold “branch” until the latter is
removed completely from the active contour. Obvi-
ously, the topology of the contour is unaffected by the
fold-removing procedure.
Figure 13: The candidate vertex v
c
(in orange) is a spurious
saddle.
(a) (b) (c)
Figure 14: Removing folds: candidate v
c
(in orange) is se-
lected (a); a fold has been generated (in green) (b); the fold
has been removed: the topology of the contour is unaffected
(c).
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
86
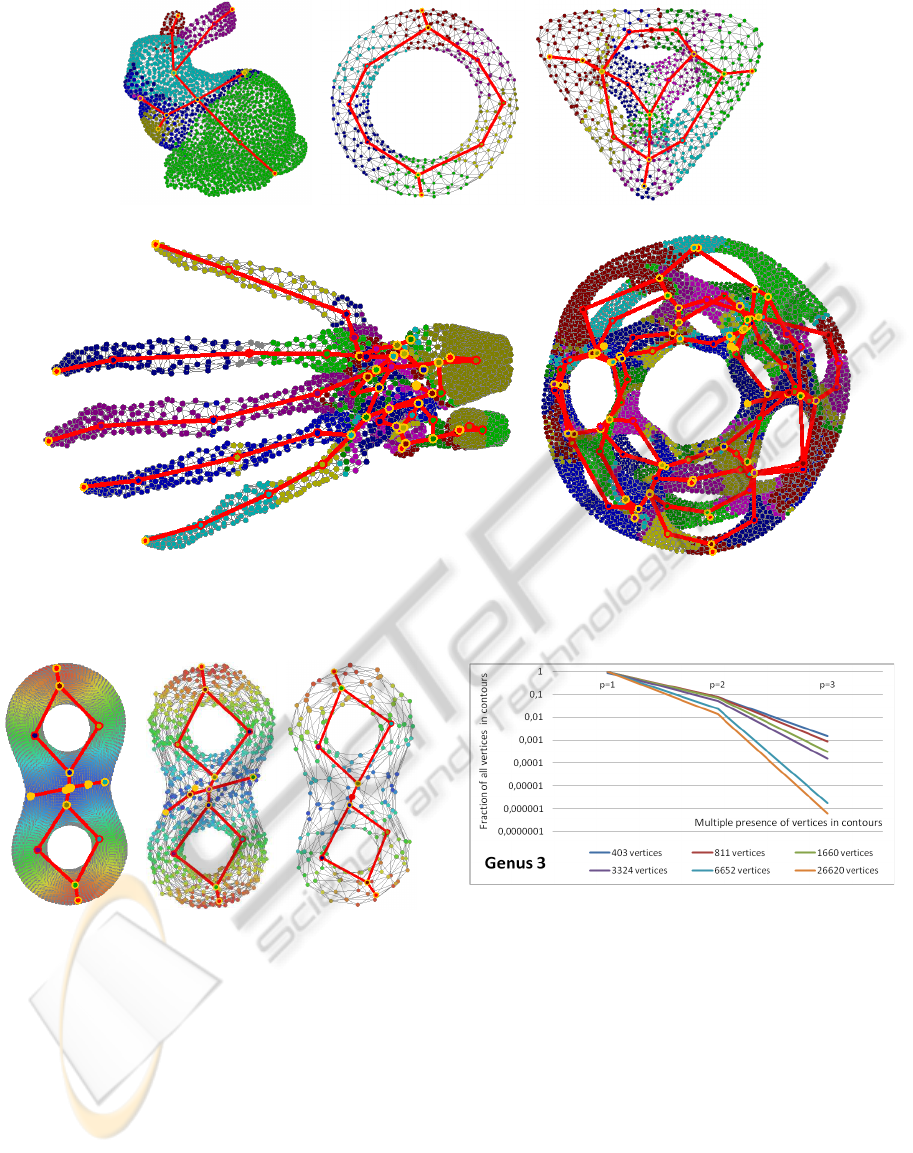
(a) Genus 0 (b) Genus 1 (c) Genus 3
(d) Genus 5 (e) Genus 22
Figure 16: A few meshes in the test set: Reeb graphs are painted in red, segmentations are highlighted with different vertices
colors. Multiple vertex memberships are not represented in these images.
(a) (b) (c)
Figure 15: The original, high-resolution mesh with 12286
vertices (a), two increasingly decimated versions with ran-
dom noise added, with 766 vertices (b) and 190 vertices (c).
4.2.8 Constructing the Reeb Graph
In the output of our algorithm, each segment σ is a
node in the Reeb graph and each arc corresponds to
an adjacency relation between two segments, as de-
scribed in Algorithm 4.1. The Reeb graph is built dur-
ing active contour evolution. Every time an event oc-
curs (either merge or split) and segments are stored in
Σ
c
, adjacency relations are also updated accordingly:
after a merge the two merging segments are declared
Figure 17: Progressive coarsening of the same mesh (Genus
3): a smaller number of vertices causes an increase of mul-
tiple presences in contours.
adjacent to the newly generated one; after a split the
parent segment is declared adjacent to the two new
ones.
5 EXPERIMENTAL EVIDENCE
In order to verify the correctness and effectiveness of
the proposed algorithm we carried out extensive tests
with a great number of meshes having different genus
and density. We present here some of the most rel-
evant results in our tests. Most of the meshes have
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS
87

been taken from the AIM@Shape database (Falci-
dieno, 2004) and range from genus 0, both with great
and small number of vertices, to genus 22 with over
ten thousand vertices.
We used a non-optimized Java implementation be-
cause, at present, our main interest is the validation of
the algorithm.
Since the algorithm contains a random choice of
the starting point (see 4.1.1), our tests were carried
out in an exhaustive way even with respect to the cal-
culation of the diameter vertices. As a matter of fact,
in order to test all the variants of the Morse function,
we carried out, for each mesh, n test runs (with n be-
ing the number of mesh vertices), selecting at every
run a different starting point, until every mesh vertex
has been selected.
In order to validate the properties of the Reeb
graphs obtained, we used the procedure described in
(Safar et al., 2009) to compute the minimum cycle ba-
sis and hence the number of loops in each of those
graphs. The number of loops must be equal to the
genus of the corresponding mesh, which can be com-
puted with the well-known Euler equation:
v− e +t = 2− 2g (2)
where v is the number of vertices in the mesh, e is the
number of edges and t is the number of triangles.
With all the variants of the Morse function and for
each of the meshes shown in Table 1, the proposed
algorithm computes the Reeb graph corresponding to
the correct genus. The meshes in the test set are also
illustrated in Figure 16, together with the Reeb graphs
and the segmentations obtained.
Finally, Figure 17(a) shows how coarser meshes
lead to more complex active contours. The same
mesh shown in Figure 16(c) has been considered at
first with high resolution and then progressively dec-
imated: in the statistics of these experiments multi-
ple presences increase by orders of magnitude as the
number of vertices decreases.
Table 1: Some of the meshes used to check the validity of
the algorithm, with their genus and number of vertices.
Mesh Name Genus Vertices
Bunny 0 3052
Torus 1 359
Double torus-12286 2 12286
Double torus-766 2 766
Double torus-190 2 190
Genus3 3 782
HandG5 5 4037
HandG8 8 3639
Eptoroid 22 10851
6 CONCLUSIONS
As we have seen, the key aspect in the algorithm
presented is the way in which active contours are
evolved. Using the properties of the Morse func-
tion and the discrete topology of the triangle mesh,
the evolution process can be performed by relying al-
most entirely on information being local to the ver-
tices in the contours and their immediate neighbor-
hood. In particular, it is not even necessary to verify
at each step the connectedness of each active contour,
because both split and merge events can only occur
when the candidate vertex has multiple presence on
one or more contours. A more complex test on the
entire contour is only required when dealing with a
split event, since the multiple presence of vertices and
edges can make it more difficult to detect the con-
nected components after the split.
Even if the theoretical validation of the correct-
ness of the algorithm remains to be assessed, the ex-
perimental evidence presented supports the idea that
the algorithm proposed could be effective for a wide
class of real-world meshes.
ACKNOWLEDGEMENTS
The authors want to thank an anonymous reviewer for
the precious comments and suggestions received.
REFERENCES
Berretti, S., Del Bimbo, A., and Pala, P. (2009). 3d mesh
decomposition using reeb graphs. Image and Vision
Computing, 27(10):1540 – 1554. Special Section:
Computer Vision Methods for Ambient Intelligence.
Biasotti, S., Giorgi, D., Spagnuolo, M., and Falcidieno, B.
(2008). Reeb graphs for shape analysis and applica-
tions. Theoretical computer science, 392:5–22.
Biasotti, S., Mortara, M., and Spagnuolo, M. (2000).
Surface compression and reconstruction using reeb
graphs and shape analysis. In Proceedings of 16th
Spring Conference on Computer Graphics, pages
175–184. ACM press.
Cole-McLaughlin, K., Edelsbrunner, H., Harer, J., Natara-
jan, V., and Pascucci, V. (2003). Loops in reeb graphs
of 2-manifolds. In Proceedings of the nineteenth an-
nual symposium on Computational geometry, SCG
’03, pages 344–350, New York, NY, USA. ACM.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269271.
Doraiswamy, H. and Natarajan, V. (2009). Efficient algo-
rithms for computing reeb graphs. Computational Ge-
ometry, 42(6-7):606 – 616.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
88

Edelsbrunner, H. (2001). Geometry and Topology for Mesh
Generation. Cambridge University Press, New York,
NY, USA.
Edelsbrunner, H., Harer, J., Mascarenhas, A., Pascucci, V.,
and Snoeyink, J. (2008). Time-varying reeb graphs
for continuous space-time data. Computational Ge-
ometry, 41(3):149 – 166.
Edelsbrunner, H., Harer, J., and Zomorodian, A.(2003). Hi-
erarchical morse-smale complexes for piecewise lin-
ear 2-manifolds. Discrete and Computational Geom-
etry, 30(1):87–107.
Falcidieno, B. (2004). Aim@shape project presentation.
In Shape Modeling Applications, 2004. Proceedings,
page 329.
Hilaga, M., Shinagawa, Y., Kohmura, T., and Kunii, T. L.
(2001). Topology matching for fully automatic simi-
larity estimation of 3d shapes. In Proceedings of the
28th annual conference on Computer graphics and
interactive techniques, SIGGRAPH ’01, pages 203–
212, New York, NY, USA. ACM.
Katz, S., Leifman, G., and Tal, A. (2005). Mesh segmen-
tation using feature point and core extraction. The
Visual Computer, 21:649–658. 10.1007/s00371-005-
0344-9.
Knuth, D. E. (1998). The Art of Computer Programming
Vol. 2: Seminumerical Algorithms. Addison Wesley,
3rd edition.
Lazarus, F. and Verroust, A. (1999). Level set diagrams
of polyhedral objects. In Fifth Symposium on Solid
Modeling, pages 130–140. ACM.
Milnor, J. (1963). Morse Theory. Princeton University
Press.
Mortara, M. and Patane, G. (2002). Affine-invariant skele-
ton of 3d shapes. Shape Modeling and Applications,
International Conference on, 0:245–252.
Novotni, M., Klein, R., and Ii, I. F. I. (2002). Computing
geodesic distances on triangular meshes. In In Proc.
of WSCG2002, pages 341–347.
Pascucci, V., Scorzelli, G., Bremer, P.-T., and Mascarenhas,
A. (2007). Robust on-line computation of reeb graphs:
simplicity and speed. ACM Trans. Graph., 26.
Patane, G., Spagnuolo, M., and Falcidieno, B. (2009). A
minimal contouring approach to the computation of
the reeb graph. IEEE Transactions on Visualization
and Computer Graphics, 15:583–595.
Reeb, G. (1946). Sur les points singuliers d une forme de
pfaff completement integrable ou d une fonction nu-
merique. In Comptes rendus de l’Academie des Sci-
ences 222, pages 847–849.
Safar, M., Alenzi, K., and Albehairy, S. (2009). Counting
cycles in an undirected graph using dfs-xor algorithm.
In Networked Digital Technologies, 2009. NDT ’09.
First International Conference on, pages 132 –139.
Schaefer, S. and Yuksel, C. (2007). Example-based skeleton
extraction. In Proceedings of the fifth Eurographics
symposium on Geometry processing, pages 153–162,
Aire-la-Ville, Switzerland. Eurographics Association.
Sebastian, T., Klein, P., and Kimia, B. (2002). Shock-based
indexing into large shape databases. In Computer
Vision ECCV 2002, volume 2352 of Lecture Notes
in Computer Science, pages 83–98. Springer Berlin /
Heidelberg.
Shapira, L., Shamir, A., and Cohen-Or, D. (2008). Consis-
tent mesh partitioning and skeletonization using the
shape diameter function. Visual Comput, 24:249–259.
Shinagawa, Y. and Kunii, T. (1991). Constructing a reeb
graph automatically from cross sections. Computer
Graphics and Applications, IEEE, 11(6):44 –51.
Shinagawa, Y., Kunii, T., and Kergosien, Y. (1991). Surface
coding based on morse theory. Computer Graphics
and Applications, IEEE, 11(5):66 –78.
Sundar, H., Silver, D., Gagvani, N., and Dickinson, S.
(2003). Skeleton based shape matching and retrieval.
In Shape Modeling International, 2003, pages 130 –
139.
Tierny, J., Vandeborre, J., and Daoudi, M. (2006). 3d mesh
skeleton extraction using topological and geometrical
analyses. In 14th Pacific Conference on Computer
Graphics and Applications. Pacific Graphics.
COMPUTING THE REEB GRAPH FOR TRIANGLE MESHES WITH ACTIVE CONTOURS
89
