
PREDICTIVE CONTROL FOR TRAJECTORY TRACKING
AND DECENTRALIZED NAVIGATION OF MULTI-AGENT
FORMATIONS
Ionela Prodan
1,2
, Sorin Olaru
1
, Cristina Stoica
1
and Silviu-Iulian Niculescu
2
1
SUPELEC Systems Sciences (E3S) - Automatic Control Department, 3 Joliot Curie, 91192, Gif sur Yvette, France
2
Laboratory of Signals and Systems, SUPELEC - CNRS, 3 Joliot Curie, 91192, Gif sur Yvette, France
Keywords:
Multi-agent Systems, Model Predictive Control (MPC), Potential Function, Polyhedral Lyapunov Function.
Abstract:
This paper addresses a predictive control strategy for multi-agent formations with a time-varying topology.
The goal is to guarantee a trajectory tracking, where a reference trajectory is specified for an agent designed
as the leader. Then, a predictive control strategy combined with the Potential Field method is used in order to
derive a control action based only on local information within the group of agents. The main concern is that
the interconnections between the agents are time-varying, affecting the neighborhood around each agent. The
proposed method exhibits effective performance validated through some illustrative examples.
1 INTRODUCTION
Control and coordination of multi-agent systems,
such as pedestrians in the crowd, vehicles, space-
craft and unmanned vehicles, are emerging as a
challenging field of research. There exist several
classes of multi-agent systems where the intercon-
nections between the agents could be time-varying
(e.g. traffic control, pedestrian behavior in the crowd
etc.). Guaranteeing stability with the existing coop-
erative control techniques is still an open problem for
multi-agent systems with time-varying (constrained)
topologies. This paper addresses a new methodology
based on predictive control in order to answer to some
of these difficulties; an illustrative example proves the
interest of the proposed methodology.
Collision avoidance can be difficult in the con-
text of managing multiple agents, since certain (static
or dynamic) constraints are non-convex. A common
point of most publications in the collision avoidance
problem is devoted to the case of punctiform agents,
which is far from real world applications. In many
of them the relative positioning between agents be-
comes important, such as the NASA’s mission to con-
struct a large interferometer from multiple telescopes
(Schneider, 2009). Also, in air traffic management,
two aircraft are not allowed to approach each other
closer than a specific alert distance.
A class of methods for collision avoidance prob-
lems uses artificial potential fields to directly obtain
feedback control actions steering the agents over the
entire workspace. There is a large literature dedicated
to the formation control for collections of vehicles us-
ing the potential field approach. The authors of (Jad-
babaie et al., 2003) and (Tanner et al., 2007) investi-
gate the motions of vehicles modeled as double inte-
grators. Their objective is that the vehicles achieve a
common velocity while avoiding collisions with ob-
stacles and/or agents assumed to be points.
The aim of the present paper is twofold: first, to
provide a framework for non point-like shapes which
may define obstacles and/or safety regions around
an agent; second, to offer a novel control strategy
derived from a combination of constrained receding
horizon and potential field techniques for the trajec-
tory tracking problem, applied to multi-agent systems
with time-varying topologies.
This paper is organized as follows. Section 2
presents two constructions that take into account the
shape of a convex region defining an obstacle and/or
a safety region around an agent. Section 3 presents
the trajectory tracking problem for a leader/followers
formation. A flat trajectory is generated for the leader
and using predictive control the tracking error is min-
imized. For the followers, a potential function is em-
bedded within MPC in order to achieve the group for-
mation with a collision free behavior. Further on, Sec-
tion 4 presents illustrative simulation results. And fi-
209
Prodan I., Olaru S., Stoica C. and Niculescu S..
PREDICTIVE CONTROL FOR TRAJECTORY TRACKING AND DECENTRALIZED NAVIGATION OF MULTI-AGENT FORMATIONS.
DOI: 10.5220/0003749102090214
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 209-214
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

nally, several concluding remarks are drawn in Sec-
tion 5.
The following notations will be used through-
out the paper. Given a vector v ∈ R
n
, kvk
∞
:=
max
i=1,···,n
|v
i
| denotes the infinity norm of v.
Minkowski’s addition of two sets X and Y is defined
as X ⊕ Y =
A + B : A ∈ X , B ∈ Y
. The interior of
a set S, Int(S) is the set of all interior points of S. De-
note as B
n
p
= {x ∈ R
n
: kxk
p
≤ 1} the unit ball of norm
p, where kxk
p
is the p-norm of vector x. Let x
k+1|k
denote the value of x at time instant k + 1, predicted
upon the information available at time k ∈ N.
2 PREREQUISITES
For safety and obstacle avoidance problems the fea-
sible region in the space of solutions is a non-convex
set. Usually this region is considered as the comple-
ment of a (union of) convex region(s) which describes
an obstacle and/or a safety region.
Let us define a bounded convex set in its polyhe-
dral approximation, a polytope S ⊂ R
n
through the
implicit half-space description:
S =
x ∈ R
n
: h
a
x ≤ k
a
, a = 1,··· , n
h
, (1)
with h
a
∈ R
1×n
, k
a
∈ R and n
h
the number of half-
spaces. We focus on the case where k
a
> 0, meaning
that the origin is contained in the strict interior of the
polytopic region, i.e. 0 ∈ Int(S).
In the following, we are interested in measuring
the relative position of an agent to such a region. In
other words, we require a function which measures if
and when a given state is inside or outside the poly-
hedral set (1). The forthcoming constructions will be
used in a repulsive potential function to take into ac-
count the shape of the convex region in terms of (1).
2.1 Polyhedral Function
Consider the class of (symmetrical) piecewise linear
functionals defined using the specific shape of a poly-
hedral set. The following definitions will be instru-
mental for the rest of the paper.
Definition 1. (Minkowski function – (Blanchini,
1995)). Any bounded convex set S induces a
Minkowski function defined as
µ(x) = in f
α ∈ R, α ≥ 0 : x ∈ αS
(2)
Definition 2. (Polyhedral function – (Blanchini,
1995)). A polyhedral function is the Minkowski func-
tion of the polyhedral bounded convex set S defined in
(1). This function has the following expression:
µ(x) = kFxk
∞
, (3)
where F ∈ R
n
h
×n
is a full column matrix with F
a
=
h
a
k
a
,
a = 1,··· , n
h
.
In fact, any polytope can be defined in terms of the
Minkowski function (2). Indeed there always exists a
full column matrix F ∈ R
n
h
×n
such that the polytope
S in (1) is equivalently defined as
S =
x ∈ R
n
: µ(x) ≤ 1
, (4)
with µ(x) defined by (3). From the avoidance point of
view, the Minkowski function (2) denotes the inclu-
sion of a value x to the given polytope (4) if µ(x) ∈
[0,1]. Conversely, if µ(x) > 1, then x is outside the
polytope (4).
Remark 1. Note that if k
a
< 0 in (1), the origin is not
contained in the strict interior of the polytopic region,
i.e. 0 /∈ Int(S); then the polyhedral function can be
brought to the form (3) by imposing
F
a
=
h
a
(x − x
s
)
k
a
− h
a
x
s
, a = 1,··· , n
h
, (5)
with x
s
∈ R
n
the analytic center of the polytope (1).
Note that, the polyhedral function (3) is piecewise
affine and continuous. This means that each of the
inequalities which compose its definition can provide
the maximum, an explicit description of these regions
being
X
a
=
n
x ∈ R
n
:
h
a
k
a
x >
h
b
k
b
x,∀ a 6= b, a,b = 1, · · · ,n
h
o
.
(6)
The entire space can thus be partitioned in a union
of disjoint regions X
a
which are representing in fact
cones with a common point in the origin (respectively
in x
s
for the general case evoked in Remark 1).
Practically, the polyhedral function (2) can be rep-
resented in the form
µ(x) = F
a
x, ∀ x ∈ X
a
, a = 1,··· , n
h
(7)
and the piecewise affine gradient is defined as:
5µ(x) = F
a
, ∀ x ∈ X
a
, a = 1,··· , n
h
. (8)
Remark 2. Strictly speaking the gradient (8) is mul-
tivalued (the Minkowski function induced by a poly-
tope is not differentiable in the classical sense, rather
it is differentiable almost everywhere). However, an
univocal candidate can be selected for the forthcom-
ing computations, an alternative is to work with the
multivalued expression of the gradient.
2.2 Exemplification for the
Construction of Repulsive Potential
Function
In this subsection the previous theoretical tools will
be integrated in order to describe a piecewise affine
ICAART 2012 - International Conference on Agents and Artificial Intelligence
210

(a) (b)
Figure 1: (a) The polyhedral function (7). (b) The repulsive
potential using the polyhedral function (7).
function which measure the position of a state with
respect to the frontier of a polyhedral set defined in
(1). The derived potential function takes into account
the shape of the convex region which will define a
safety region for an agent and/or an obstacle. For a
given convex region, Figure 1.a illustrates the polyhe-
dral function according to (7).
Further, for the control design purpose, the con-
struction based on the polyhedral function defined in
(7) is proposed for the generation of a repulsive po-
tential:
V
µ
(µ(x)) = c
1
e
−(µ(x)−c
2
)
2
, (9)
where the parameters c
1
and c
2
are positive constants
representing the strength and effect ranges of the re-
pulsive potential.
Figure 1.b illustrates the proposed function (9) for
two polyhedral obstacles. As it can be seen, the func-
tion has a high value inside the polytopes and a low
value outside them. The repulsive potential will be
further used in order to derive a control action such
that the collision avoidance inside the formation is
satisfied.
3 TRAJECTORY TRACKING FOR
A LEADER/FOLLOWERS
FORMATION
This section presents the formation trajectory track-
ing problem. The agents are required to follow a
pre-specified trajectory while preserving a tight inter-
agent formation in time. Each agent has an associated
polyhedral safety region as defined in (1). Using a
leader/followers approach, we generate a flat trajec-
tory for the leader and formulate a receding horizon
optimization problem in order to minimize the track-
ing error. For the followers, we propose a gradient
method combined with a receding horizon approach
which aims to follow the group leader and respects
the collision avoidance formation specifications.
A set of N
a
linear systems will be used to model the
behavior of individual heterogeneous agents. The i
th
system is described by the following continuous time
dynamics:
˙x
i
(t) = A
c,i
x
i
(t) + B
c,i
u
i
(t), i = 1,··· , N
a
, (10)
where x
i
(t) ∈ R
n
are the state variables and u
i
(t) ∈ R
m
is the control input vector for the i
th
agent. The
components of the state are: the position p
i
(t) and
the velocity v
i
(t) of the i
th
agent such that x
i
(t) =
[p
i
(t) v
i
(t)]
T
.
3.1 Trajectory Generation
The idea is to find a trajectory (x
l
(t),u
l
(t)) that steers
the model of the leader (10) with i = l from an initial
state x
0
to a final state x
f
, over a fixed time interval
[t
0
,t
f
]. Using the flatness theory (Fliess et al., 1995),
the system is parameterized in terms of a finite set of
variables z
l
(t) and a finite number of their derivatives:
x
l
(t) = ξ(z
l
(t), ˙z
l
(t),··· , z
l,(q)
(t)), (11)
u
l
(t) = η(z
l
(t), ˙z
l
(t),··· , z
l,(q)
(t)),
where z
l
(t) = ϒ(x
l
(t),u
l
(t),
˙
u
l
(t),··· , u
l,(q)
(t)) is
called the flat output
1
. The generation of a reference
trajectory will be based on the class of polynomial
functions. Using the parametrization (11) and impos-
ing boundary constraints for the evolution of the dif-
ferentially flat systems (De Don
´
a et al., 2009) a ref-
erence trajectory z
l
re f
(t) can be generated by solving
a linear system of equalities. Therefore, the corre-
sponding reference state and input for the system (10),
with i = l are obtained by replacing the reference flat
output z
l
re f
(t), with t ∈ [t
0
,t
f
] in (11):
x
l
re f
(t) = ξ(z
l
re f
(t), ˙z
l
re f
(t),··· , z
l,(q)
re f
(t)), (12)
u
l
re f
(t) = η(˙z
l
re f
(t), ¨z
l
re f
(t),··· , z
l,(q)
re f
(t)),
where t ∈ [t
0
,t
f
].
In the rest of the paper we use the discrete corre-
spondent of the reference signals in (12). Therefore, a
corresponding discrete-time model for the equations
(10) is constructed upon a chosen sampling period T
s
by considering the time instants t
k
= kT
s
:
x
i
(k + 1) = A
i
x
i
(k) + B
i
u
i
(k), k ∈ N, i = 1 : N
a
,
(13)
where x
i
(0) corresponds to the boundary condition in
(12) and u
i
(k) = u
i
(t
k
). The pairs (A
i
, B
i
) are given
by:
A
i
= e
A
c,i
T
s
, B
i
=
Z
T
s
0
e
A
c,i
(T
s
−θ)
B
c,i
dθ.
1
Hereafter we assume that the characteristics necessary
for flat trajectory (controllability and existence of a flat out-
put) are respected for the leader.
PREDICTIVE CONTROL FOR TRAJECTORY TRACKING AND DECENTRALIZED NAVIGATION OF
MULTI-AGENT FORMATIONS
211

Considering the discrete-time model of the leader
(13) with i = l, we compare the measured state
and input variables with the reference trajectory
(x
l
re f
(k), u
l
re f
(k)) which satisfies the nominal dynam-
ics:
x
l
re f
(k + 1) = A
l
x
l
re f
(k) + B
l
u
l
re f
(k). (14)
Further on, the tracking error between the leader’s
state (13) and the state reference (14) becomes:
˜x
l
(k + 1) = A
l
˜x
l
(k) + B
l
˜u
l
(k), (15)
with ˜u
l
(k) = u
l
(k) − u
l
re f
(k), ˜x
l
(k) = x
l
(k) − x
l
re f
(k).
Since the reference trajectory is available before-
hand, an optimization problem which minimizes the
tracking error for the leader can be formulated in a
predictive control framework (Maciejowski, 2002).
3.2 Predictive Control for the Leader
In what follows we present the predictive control
problem, where an optimization is performed to com-
pute the control law for the leader. The discrete model
of the leader (i.e. i = l in (13)) is used in a predictive
control context which permits the minimization of the
tracking error.
A finite receding horizon implementation of
the optimal control law is typically based on the
real-time construction of a control sequence
˜
u
l
=
{ ˜u
l
(k|k), ˜u
l
(k + 1|k),· · · , ˜u
l
(k + N
l
− 1|k)} that mini-
mizes the finite horizon quadratic objective function:
˜
u
∗
= arg
˜
u
l
min(k ˜x
l
(k + N
l
|k)k
P
+ (16)
+
N
l
−1
∑
s=1
k ˜x
l
(k + s|k)k
Q
+
N
l
−1
∑
s=0
k ˜u
l
(k + s|k)k
R
),
subject to:
˜x
l
(k + s + 1|k) = A
l
˜x
l
(k + s|k) + B
l
˜u
l
(k + s|k),
˜x
l
(k + s|k) ∈ X
l
, s = 1, · · · ,N
l
,
˜u
l
(k + s|k) ∈ U
l
, s = 1, · · · ,N
l
,
(17)
Here Q = Q
T
0, R 0 are positive definite weight-
ing matrices, P = P
T
0 defines the terminal cost and
N
l
denotes the prediction horizon for the leader. The
optimization problem (16) has to be solved subject to
the dynamic constraints (17). In the same time, other
security or performance specifications can be added
to the system trajectory. These physical limitations
(velocity, energy or forces) are stated in terms of hard
constraints on the internal state variables and input
control action as in (17). Note that the sets X
l
, U
l
have to take into account the reference tracking type
of problem delineated in (16). Thus, the absolute lim-
itations have to be adjusted according to the reference
signals.
3.3 Decentralized Predictive Control for
the Followers
In this subsection, we present a control strategy which
is a combination of MPC and Potential Field con-
trol approach. The goal is to control the agents to
achieve a formation while following the specified tra-
jectory. The repulsive potential functions introduced
in (9) produce a potential field. The negative gradient
of this potential assures a collision free behavior for
the agents. Globally, an attractive component of the
potential function aims at maintaining a given forma-
tion. In this context, we provide a practical control de-
sign method which enables the decentralized decision
making for a leader/followers group of agents. The
proposed method exhibits effective trajectory track-
ing performances while avoiding the centralized de-
sign which can be computationally demanding.
Corollary 1. Consider the agents i and j with the
associated safety regions S
i
, S
j
as defined in (1).
The agent i with the associated position p
i
does not
intersect agent j with the position p
j
if an only if
p
i
/∈ S
i j
(p
j
)
2
, where
S
i j
(p
j
) , {p
j
} ⊕ S
j
⊕ {−S
i
}, (18)
with i = 1,··· , N
a
, i 6= j.
Let us now assume the steering policy for each
follower agent (i.e. i 6= l in (13)) based only on local
state information from its nearest neighbors.
Definition 3. (Neighboring graph (Tanner et al.,
2007)). An undirected graph G = {V , E} represents
the nearest neighboring relations and consists of:
- a set of vertices (nodes) V = {n
1
,n
2
,··· , n
N
a
} in-
dexed by the agents in the group;
- a set of edges E = {(n
i
,n
j
) ∈ V × V : n
i
↔ n
j
},
containing unordered pairs of nodes that represent
neighboring relations.
The set of neighbors of agent i with i = 1,··· ,N
a
and i 6= l can be defined as follows:
N
i
(k) , { j = 1,··· , N
a
: kp
i
(k) − p
j
(k)k ≤ r, i 6= j},
(19)
where r is the radius of the ball centered in p
i
. Since
the agents are in motion, their relative distances can
change with time, affecting their neighboring sets
(19). For each agent i, we define an inter-agent poten-
tial function which aims to accomplish the collision
avoidance between agents, the convergence to a group
formation and following the leader. To be specific, the
following inter-agent potential function is used:
V
i
(p
i
,v
i
) = β
r
V
r
i
(p
i
) + β
a
V
a
i
(p
i
,v
i
), ∀i ∈ N
i
. (20)
2
This is implied by the requirement that the safety re-
gions of the agents do not intersect.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
212

The two components of the potential function ac-
count for the objectives presented above and β
r
,β
a
are
weighting coefficients for each objective. For the i
th
agent the total potential is formed by summing the po-
tentials terms corresponding to each of its neighbors.
Consequently, in our approach, the potential functions
are designed as follows:
1) V
r
i
(p
i
) denotes the repulsive potentials that agent
i senses from its neighbors:
V
r
i
(p
i
) =
∑
j∈N
i
V
r
i j
(p
i
) (21)
To implement this, the concepts introduced in
Subsection 2.2, specifically the potential func-
tions (9) is taken into account:
V
r
i j
(p
i
) = c
1
e
−(µ
i j
(p
i
)−c
2
)
2
, i 6= j, i 6= l, (22)
where µ
i j
(p
i
) is the polyhedral function (3) in-
duced by the polyhedral set defined in (18). Note
that the repulsive component (22) takes into ac-
count the safety regions (18) associated to both
the followers and the leader.
2) V
a
i
(p
i
,v
i
) denotes the attractive component be-
tween agents in order to achieve a formation and
to follow the leader:
V
a
i
(p
i
,v
i
) =
∑
j∈N
i
V
a
i j
(p
i
,v
i
) + kp
l
− p
i
k, (23)
for all i ∈ N
i
and i 6= l.
The second component denotes the relative dis-
tance between the leader and the followers. The
first component V
a
i j
(x
i
) has the following form:
V
a
i j
(p
i
,v
i
) = log(µ
2
i j
(p
i
)) + β
v
(v
i
− v
j
), (24)
where β
v
denotes a weighting coefficient for
which the agents velocities are synchronizing.
Similar with other methods from the literature, the pa-
rameters of the potential field have to be determined
experimentally. It will be seen in the simulations that
the collision avoidance is realized for the chosen pa-
rameters.
In the following, we reformulate the
optimization problem (16) for the follow-
ers, by using the potential-based cost func-
tion described in (20). A control sequence
u
i
= {u
i
(k|k),u
i
(k + 1|k),· · · ,u
i
(k + N
f
− 1|k)}
which minimizes the finite horizon nonlinear
objective function:
u
∗
= arg
u
i
min
N
f
∑
s=0
V
i
(p
i
(k + s|k),v
i
(k + s|k)
!
. (25)
Here N
f
denotes the prediction horizon for the fol-
lowers. In the optimization problem (25) we need to
know the future values of the neighboring graph and
the values of the state for the corresponding neigh-
bors. All these elements are time-varying and difficult
to estimate. For the ease of computation we assume
the following:
- The neighboring graph is considered to be con-
stant along the prediction horizon, that is,
N
i
(k + s|k) , N
i
(k) (26)
- The future values of the followers state are con-
sidered constant
x
j
(k + s|k) , x
j
(k) (27)
- An estimation of the leader’s state is provided by
the equation (15)
x
l
(k + s|k) , ˜x
l
re f
(k + s) (28)
The equations (26)–(28) represent only rough approx-
imations of the future state of the agents. Obviously,
the MPC formulation can be improved by using pre-
diction of the future state of the neighboring agents.
Where feasible, this prediction may be provided by
the agents themselves (Dunbar and Murray, 2006).
Here a simplified approach was implemented for the
followers (by assuming constant predictions) and us-
ing the reference trajectory for the leader.
4 SIMULATIONS
Consider a set of N
a
= 5 heterogeneous agents in two
spatial dimensions with the dynamics described by:
A
i
=
0 0 1 0
0 0 0 1
0 0 −
ν
i
m
i
0
0 0 0 −
ν
i
m
i
, B
i
=
0 0
0 0
1
m
i
0
0
1
m
i
(29)
where [x
i
y
i
v
i
x
v
i
y
]
T
, [u
i
x
u
i
y
]
T
are the state and the
input of each system. The components of the state
are: the position (x
i
,y
i
) and the velocity (v
i
x
,v
i
y
) of
the i
th
agent, i = 1,· · · ,N
a
. The parameters m
i
, ν
i
are the mass of the agent i and the damping factor,
respectively: m
1
= 45kg, m
2
= 60kg, m
3
= 30kg,
m
4
= 50kg, m
5
= 75kg, ν
1
= 15Ns/m, ν
2
= 20Ns/m,
ν
3
= 18Ns/m, ν
4
= 35Ns/m, ν
5
= 23Ns/m. The ini-
tial positions and velocities of the agents are chosen
randomly. For the sake of illustration, an identical
polyhedral safety region as in (1) is associated to each
agent. We take arbitrarily l = 1 to be the leader which
has to be followed by the rest of the agents i = 1,. . . , 4.
Figure 2 illustrates the potential filed generated for 5
agents.
PREDICTIVE CONTROL FOR TRAJECTORY TRACKING AND DECENTRALIZED NAVIGATION OF
MULTI-AGENT FORMATIONS
213
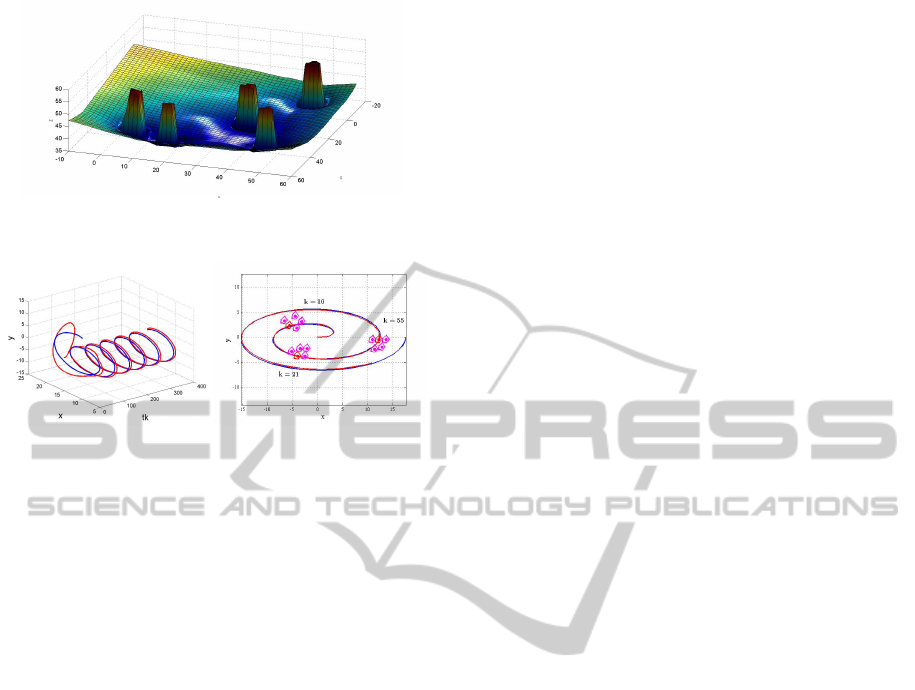
Figure 2: Potential filed in a workspace with 5 agents.
(a) (b)
Figure 3: (a) The reference trajectory and the time evolu-
tion of the leader along the trajectory. (b) Trajectory track-
ing of the leader/followers formation at different time in-
stances with their safety regions (leader in red, followers in
magenta).
For the leader we generate through flatness meth-
ods, state and input references (12) and for both types
of agents we use MPC in order to construct the control
action. A quadratic cost function as defined in (16) is
used for the leader. Figure 3.a illustrates the refer-
ence trajectory (in blue) and the time evolution of the
leader (in red) along the trajectory. Satisfactory track-
ing performances for the given reference trajectory
are obtained with a prediction horizon N
l
= 10. For
the followers we consider a potential function as the
cost function in the optimization problem (25), with
a prediction horizon N
f
= 2. The potential will be
constructed such that both, the following of the leader
and the maintaining of a formation are respected. The
neighborhood radius is set to r = 8m, the weighting
coefficients are β
r
= 1, β
a
= 10, c
3
= 1, c
4
= 0.25,
β
v
= 15. The effectiveness of the present algorithm is
confirmed by the simulation depicted in Figure 3.b,
where the evolution of the agents is represented at
three different time instances. The agents success-
fully reach a formation and follow the leader without
trespassing each other safety regions.
5 CONCLUSIONS
This paper presents the trajectory tracking problem of
multiple agents. Convex safety regions are associated
to each agent in order to solve the collision avoidance
problem. First, the notion of polyhedral function is
recalled and further introduced in a potential function
which accounts for the associated safety region. Sec-
ond, in real-time, a receding horizon control design
and a leader/followers strategy are adopted for driv-
ing the agents into a formation with collision free be-
havior.
ACKNOWLEDGEMENTS
The research of Ionela Prodan is financially sup-
ported by the EADS Corporate Foundation (091-
AO09-1006).
REFERENCES
Blanchini, F. (1995). Nonquadratic Lyapunov functions for
robust control. Automatica, 31(3):451–461.
De Don
´
a, J., Suryawan, F., Seron, M., and L
´
evine, J. (2009).
A flatness-based iterative method for reference tra-
jectory generation in constrained NMPC. Nonlinear
Model Predictive Control, pages 325–333.
Dunbar, W. and Murray, R. (2006). Distributed receding
horizon control for multi-vehicle formation stabiliza-
tion. Automatica, 42(4):549–558.
Fliess, M., L
´
evine, J., Martin, P., and Rouchon, P. (1995).
Flatness and defect of non-linear systems: introduc-
tory theory and examples. International Journal of
Control, 61(6):1327–1361.
Jadbabaie, A., Lin, J., and Morse, A. (2003). Coordination
of groups of mobile autonomous agents using nearest
neighbor rules. Automatic Control, IEEE Transactions
on, 48(6):988–1001.
Maciejowski, J. (2002). Predictive control: with con-
straints. Pearson Education.
Schneider, J. (2009). Pathway Toward a Mid-Infrared Inter-
ferometer for the Direct Characterization of Exoplan-
ets. Arxiv preprint arXiv:0906.0068.
Tanner, H., Jadbabaie, A., and Pappas, G. (2007). Flocking
in fixed and switching networks. Automatic Control,
IEEE Transactions on, 52(5):863–868.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
214
