
A COMPARISON OF DIPLOMACY GAMEBOARD GRAPH SEARCH
ALGORITHMS
Daniel P. Stormont and Vicki H. Allan
Department of Computer Science, Utah State University, Logan, Utah, U.S.A.
Keywords:
Agent, Diplomacy, Search.
Abstract:
The boardgame Diplomacy has been used as a testbed for multiagent systems almost since the time of its
introduction in 1959. The reason is that the game presents a number of interesting challenges to artificial intel-
ligence researchers: a state space that is too large to be tackled by brute force searches, imperfect information
due to simultaneous movement, no random elements, and non-binding negotiations between the seven players.
This paper looks at just one aspect of creating an agent for playing Diplomacy – finding the fewest number of
moves to achieve a victory in the game, if the player was unopposed. This planning function forms the basis
for a more sophisticated move planner that also takes into account the game state and the other players. Three
search algorithms are compared to determine which is the most effective (in terms of the number of map nodes
expanded during the search).
1 INTRODUCTION
Researchers in multiagent systems seek environments
that provide difficult algorithmic challenges and re-
alistic situations in order to advance the state of the
art. The boardgame Diplomacy is just such an en-
vironment. It provides challenges in many areas of
active research for agents: planning, cooperation, ne-
gotiation, trust, and coalition formation, just to name
a few. It is for this reason that there are a number
of testbeds for multiagent systems based on Diplo-
macy, including the Diplomacy Artificial Intelligence
Development Environment (DAIDE) (DAIDE, 2011)
and DipGame (Fabregues and Sierra, 2009).
This paper addresses one element of creating a
planner for a Diplomacy agent: an efficient search al-
gorithm for determining the shortest path to achieving
victory in the game. For the purposes of this paper,
the search is run from the starting positions for each
of the seven players and the optimal path to victory
is determined without taking into account the posi-
tion of any opposing players or other elements that
need to be considered for an optimal planner; such as
negotiated agreements between players, the relative
strengths of the players, and the need for cooperation
between agents or units of a single agent in order to
achieve the goals. Thus, the planner described here is
just the basis of a more sophisticated planning agent
and the search described in this paper would need to
be rerun or updated as the game state changes during
play.
After a brief introduction to the game Diplomacy
with an emphasis on the gameboard and its represen-
tation, the paper will describe the three search algo-
rithms selected for comparison, describe the design of
the software developed for the comparison, detail the
setup of the experiment, provide expected and actual
results from the comparison, and provide conclusions
and plans for future work on a Diplomacy agent based
on this work.
2 THE GAME OF DIPLOMACY
The game of Diplomacy was created by Allan B. Cal-
hamer in 1959, based on the work of one of his col-
lege professors, Sidney B. Fay (Calhamer, 2000) (Fay,
1934). The game attempts to recreate the political
situation in Europe prior to the First World War and
the system of secret alliances that initially maintained
the peace in Europe, but would eventually lead to the
greatest conflict in history up to that time. To do this,
the game incorporates a number of elements into the
game play. There is a defined negotiation period be-
fore every movement phase during a turn of the game.
There are no rules for how these negotiations occur:
they can be secret or public, at the gameboard or in
371
P. Stormont D. and H. Allan V..
A COMPARISON OF DIPLOMACY GAMEBOARD GRAPH SEARCH ALGORITHMS.
DOI: 10.5220/0003753103710374
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 371-374
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

another room, and any agreements reached are non-
binding. The only restriction is that the negotiation
period is typically time limited. After negotiations, all
players submit their planned moves in writing (or via
a computer) and the moves are adjudicated simultane-
ously. There are no elements of chance in the move-
ments (no dice rolling or card drawing) and the initial
strengths of the players will dictate cooperation be-
tween players, at least initially, as no player is strong
enough to win the game without assistance.
2.1 Representation of the Gameboard
Figure 1 shows the standard Diplomacy gameboard.
There are 75 provinces on the board (81 if coastal
areas are taken into account), which are connected
along their borders, complicating the connections be-
tween them. There are also three different types of
provinces: coast, land, and sea. Land areas can only
be occupied by armies, sea areas can only be occupied
by fleets, and coastal areas can be occupied by either.
The small circles on the map are supply centers. The
objective of the game (and the goal of the search al-
gorithms described in this paper) is for one player to
control 16 supply centers by either having been the
last player to pass through that province (it is actu-
ally a little more complex in the game since control
of supply centers is determined on every other turn -
that has been ignored for the purposes of this study)
or to have a unit in the province.
Figure 1: The Diplomacy gameboard.
Figure 2 shows the graph generated from the map
in figure 1. In this graph, the provinces are shown as
different colored nodes. Coast provinces are tan, land
provinces are green, and sea provinces are blue. A
unit can traverse any of the edges connecting nodes,
as allowed by the unit type. For example, an army
can not follow an edge from a coast region to a sea
region since only fleets can occupy a sea region. This
unit type-based limitation on movement is the reason
for the three provinces with dashed lines (Bulgaria,
Spain, and Saint Petersburg). These provinces have
more than one coast region, which limits the possible
traversals by a fleet from those provinces to a neigh-
boring province. Provinces with supply centers are
indicated by bold text in the graph.
Figure 2: A graph showing the connections between
provinces on the Diplomacy gameboard.
2.2 Starting Positions
Figure 3 shows the starting positions and unit types
for each of the seven players in Diplomacy: Austria,
England, France, Germany, Italy, Russia, and Turkey.
Each of the players starts with three units, except for
Russia, which starts with four. These starting posi-
tions and unit types are critical to this comparison of
search algorithms as they comprise the first ply of the
search tree for each of the players.
Figure 3: A Diplomacy gameboard showing the starting lo-
cations and unit types for each player.
3 SEARCH ALGORITHMS
SELECTED
Three common graph search algorithms were selected
for comparison in finding the shortest number of
moves for each player to reach the goal state of hav-
ing passed through or occupying 16 supply centers
on the Diplomacy map graph shown in figure 2. For
ICAART 2012 - International Conference on Agents and Artificial Intelligence
372
each player, the nodes occupied in the starting posi-
tion are selected as the first ply of the graph search, as
shown in figure 4. These starting positions also satisfy
the goal condition for occupying three supply centers
(four for Russia), meaning the algorithms have to find
the shortest path(s) through the graph, starting with
the first ply of the search in the player’s home na-
tion to pass through or occupy an additional 13 supply
centers (12 for Russia).
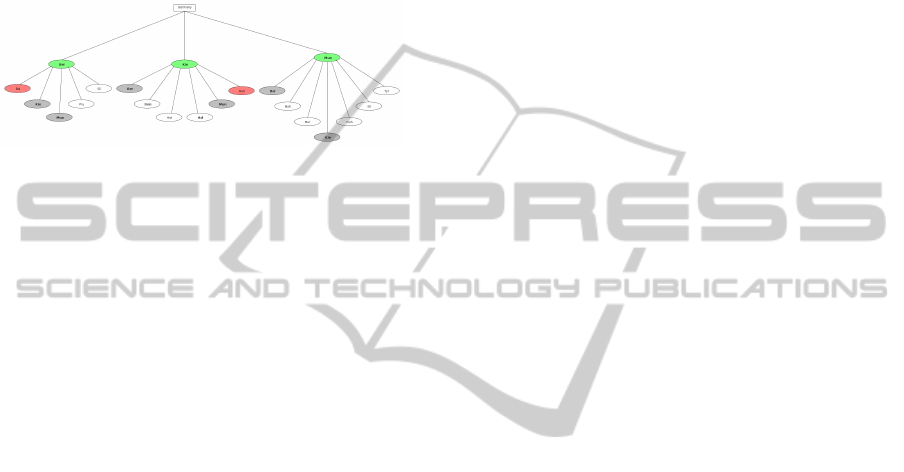
Figure 4: An example of the first ply of the Diplomacy
gameboard search for the German player.
In figure 4, the root of the search tree is the na-
tion for that player (Germany in the example). The
first level of the search tree are the nodes correspond-
ing to the starting positions for that player. (In the
case of Germany, there are armies in Berlin and Mu-
nich and a fleet in Kiel.) Note that the nodes for
the starting positions are colored green. That is be-
cause these nodes are supply centers that are occu-
pied by the player at the beginning of the game. The
next layer shows the expansion of the graph nodes
for provinces connected to the starting provinces in
the Diplomacy graph. Red nodes are provinces that
can’t be occupied by that type of unit. For exam-
ple, the unit in Berlin can not enter the Baltic Sea
node because it is an army and only fleets can oc-
cupy sea provinces. Gray nodes are nodes that are
in the visited list because they have already been tra-
versed. (The gray nodes in the figure correspond to
the starting nodes.) Finally, nodes with bold text are
supply centers (goal states). The criteria for selecting
the search algorithms were that the search algorithm
be usable on a highly connected graph, like the Diplo-
macy map graph, and that they use varying degrees of
heuristics. One search was selected that doesn’t uti-
lize heuristic values at all (breadth first search), one
was selected that only utilizes heuristic values (greedy
best first search), and one was selected that utilizes
both heuristic values and the actual cost of the path
found so far (A* search). The details of these algo-
rithms can be found in (Russell and Norvig, 2003).
Brief descriptions of the algorithms and the heuristics
applied are provided in the sections that follow.
3.1 Breadth First Search
Breadth first search was chosen as the non-heuristic
search algorithm. In the example shown in figure 4,
the algorithm will start by inserting the three start-
ing provinces (Berlin, Kiel, and Munich) into a first-
in/first-out (FIFO) queue. The goal count is also set
to three, since the three starting positions are sup-
ply centers (goal nodes). Since they are goal nodes,
when they are added to the queue, these provinces are
added to the visited list to prevent cycles. Then, the
provinces will be extracted from the queue in alpha-
betical order (since that is the order they were inserted
in) and the provinces connected to them that are legal
moves for the type of unit occupying the province and
are not already in the visited list will be added to end
of the queue. To take the province of Berlin as an ex-
ample, the Baltic Sea will not be added to the queue
because it would not be a legal move for the army in
Berlin and Kiel and Munich will not be added to the
queue because they are already in the visited list. This
means Prussia and Silesia will be added to the queue
and then Kiel will be removed from the queue for ex-
pansion. This continues until the supply center count
reaches 16, at which time the search is terminated.
3.2 Greedy Best First Search
Greedy best first search was selected as an exam-
ple of a heuristic-only search algorithm. Greedy best
first search proceeds as described in the breadth first
search, except that each node has an associated f-
value where f (x) = h(x). The heuristic value (h(x))
is set to five initially, for all players except Russia.
Because Russia starts with four units instead of three,
the initial heuristic value is set to four. These heuris-
tic values reflect a theoretical minimum value for the
distance to the number of nodes that unit needs to con-
tribute to the overall goal of 16 supply centers. When
a goal node is entered into the queue, the heuristic
value for it is decremented by one, so in the case of
Germany as illustrated in figure 4, the initial heuris-
tic will be h(x) = 5. When Berlin, Kiel, and Munich
are added to the queue, the heuristic value associated
with each of these provinces will be decremented to
h(x) = 4. The queue is a priority queue, so lower f-
values will be extracted from the queue first in FIFO
order. In this case, there will be no difference in
the extraction order from the queue; however, when
Denmark and Holland are added to the queue, their
heuristic values will be h(x) = 3 because they are goal
nodes, so they will be extracted from the queue before
the remaining provinces on the same level of the tree
– and their children will also have h(x) = 3, unless the
child is also a supply center, in which case it will have
a value of h(x) = 2. The search essentially becomes a
depth first search on these nodes at this point.
A COMPARISON OF DIPLOMACY GAMEBOARD GRAPH SEARCH ALGORITHMS
373

3.3 A* Search
A* search was selected as an example of a search that
uses both heuristic and actual cost values. The f-value
for A* search is f (x) = h(x) + g(x), where the h(x)
is the same as described in the previous section on
greedy best first search, but g(x) is a cost function
that is incremented by one for every level of expan-
sion of the search tree. Using the example of figure 4,
the initial f-value is f (x) = h(x) + g(x) = 5 + 0 = 5.
After the first three nodes are inserted into the prior-
ity queue (the same as for greedy best first search),
the f-values are f (x) = 4 + 1 = 5 so they will still be
extracted in FIFO order. When Denmark and Hol-
land are inserted into the queue, their f-values will
be f (x) = 3 + 2 = 5, but the f-values of the other
provinces that are not supply centers (for example,
Helgoland Bight) will be f (x) = 4 + 2 = 6, so these
two provinces will be extracted from the queue first
for expansion.
4 EXPERIMENTAL SETUP
To test the search algorithms, the three algorithms are
used to search the graph of starting positions for each
of the seven players in Diplomacy. The number of
nodes expanded during the search for each of the na-
tions and the total nodes expanded are used as the ba-
sis of comparison for the three algorithms. Because
the starting positions never change, there is no reason
to run the tests more than once for each algorithm.
5 RESULTS
The following sections summarize the results of the
search algorithm tests for each of the three search
algorithms. The theoretical results are a hand-
calculated value of expanding the search tree for the
German player, as was illustrated for the first two lev-
els in figure 4. The actual results are the results of
executing the code for each of the three search algo-
rithms for all seven players.
5.1 Theoretical Results
Table 1 shows the result of manually exercising
the three search algorithms on the starting positions
shown in figure 4. It is somewhat surprising that, at
least for the starting position of Germany, breadth first
search expands fewer nodes in the search tree than ei-
ther greedy best first search or A* search. This may
be an aberration due to the unique starting position of
Table 1: Nodes Expanded by Search Algorithms for Start-
ing Position of Germany.
BFS Greedy BFS A* Search
33 41 36
Germany in what is essentially the center of the map,
so other starting positions also need to be evaluated.
5.2 Actual Results
Implementation and testing of the search algorithms
described here continues in simple agents that play a
“no-press” (no negotiations) game of Diplomacy.
6 CONCLUSIONS AND FUTURE
WORK
The search described in this study is just a preliminary
planning step for a practical planning agent for play-
ing the game of Diplomacy. A planning agent would
also need to take into account the locations of other
units on the gameboard (both hostile and friendly), the
relative strengths of the other players, any negotiated
agreements with other players, the need to protect ter-
ritory already captured, the need to provide support
to other units in order to capture territory, changes in
the numbers of units on the board, retreats, and the
changing state of the gameboard each turn.
REFERENCES
Calhamer, A. B. (2000). Calhamer on Diplomacy: The
Boardgame “Diplomacy” and Diplomatic History.
1stBooksLibrary, Bloomington, Indiana.
DAIDE (2011). Reading.
Fabregues, A. and Sierra, C. (2009). A testbed for mul-
tiagent systems. Technical Report IIIA-TR-2009-09,
Autonomous University of Barcelona.
Fay, S. B. (1934). The Origins of the World War. The
Macmillan Company, New York.
Russell, S. and Norvig, P. (2003). Artificial Intelligence: A
Modern Approach. Pearson Education, Upper Saddle
River, New Jersey.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
374
