
SEEKING AND AVOIDING COLLISIONS
A Biologically Plausible Approach
M. A. J. Bourassa and N. Abdellaoui
Defence Research and Development Canada Ottawa, 3701 Carling Ave., Ottawa, Ontario, K1A 0Z4, Canada
Keywords:
Agent models, Collision avoidance, Proportional navigation.
Abstract:
The success of an agent model that incorporates a hierarchical structure of needs, required that the needs
trigger human-like actions such as collision avoidance. This paper demonstrates a minimalist, “rule-of-thumb”
collision avoidance approach that performs well in dynamic, obstacle-cluttered domains. The algorithm relies
only on the range, range rate, bearing, and bearing rate of a target perceived by an agent. Computation is
minimal and the approach yields a natural behaviour suitable for robotic or computer generated agents in
games.
1 INTRODUCTION
An agent architecture based on Maslow’s Hierar-
chy of Needs (Maslow, 1943), was introduced by
Bourassa et al.(Bourassa et al., 2011) as a possible ap-
proach to obtaining more human-like behaviour from
computer-generated characters. The approach was in-
spired by the belief that purely reactive agents that
populate many games cannot display human like be-
haviour because they lack a basic human trait: moti-
vation.
To varying degrees, human behaviour is modu-
lated by motivating factors other than a stated goal or
rules. An agent model should therefore incorporate
some aspect of motivation.
Maslow proposed a theory of human motiva-
tion (Maslow, 1943) that was human-centered and
founded on the integrated wholeness of the organism
and goals as opposed to drives. It was postulated that
humans possessed a hierarchy of needs. The most ba-
sic needs were physiological: food, drink, rest, etc.
As these needs are satisfied, other needs emerge suc-
cessively: safety, love, esteem, and self-actualisation.
Figure 1 illustrates a proposed agent model incorpo-
rating Maslow’s Hierarchy of Needs. A more detailed
illustration of the concept of agent needs is provided
in Figure 2. A one-to-one correspondence must be
established between the needs in Maslow’s Hierarchy
and equivalents for a generic agent hierarchy with the
nature of the agent being the guiding factor. For ex-
ample, human hunger and thirst may correspond to
fuel and lubricant levels in a robotic agent but to “en-
Figure 1: A proposed agent model based on Maslow’s Hi-
erarchy of Needs. The agent has sensors and a world model
for two environments: internal and external. The agent’s
actions are decided upon by the fulfillment of its needs (see
text).
ergy level” in a computer generated character in a
video game.
Each level in the hierarchy is comprised of several
individual needs. Each need is represented by a goal
and utility. Goals are common to all needs and levels,
and map a need to an action. Utilities are unique to
each need and provide a model of a need that maps
to a level of satisfaction that, in turn, modulates the
action mapped to a goal.
In the simplest implementation of the preceding
agent model, any action taken is in response to the
lowest unsatisfied need. The model provides human-
like decisions. The actions themselves, however,must
be human-like if a credible semblance of human be-
haviour is desired. This paper therefore focuses on
creating human-like behaviour for one action. This
240
A. J. Bourassa M. and Abdellaoui N..
SEEKING AND AVOIDING COLLISIONS - A Biologically Plausible Approach.
DOI: 10.5220/0003753602400245
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 240-245
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 2: The proposed Agent’s Hierarchy of Needs. The
lowest unmet needs in the pyramid are the highest motiva-
tors. Each need is associated with a goal and utility.
paper addresses one aspect of the lowest level of
Maslow’s Hierarchy, the Physiological Needs invok-
ing the action of collision avoidance. The implemen-
tation of collision avoidance is fundamental to artifi-
cial organisms such as non-player characters (NPC’s)
in computer games and simulations. Collision avoid-
ance is currently implemented either by using exten-
sive geometric algorithms or very simplistic and fixed
sets of rules (Millington, 2006). The result is colli-
sion avoidance at the cost of predictable, mechanistic
behaviour.
In this paper, an algorithm for collision avoidance
for mobile autonomous agents is defined based on
principles known to be employed in nature. A known
biological technique for collision avoidance, Constant
Bearing Decreasing Range (CBDR) is explored to
fulfil two purposes: collision avoidance and its con-
verse, intercept. Taking a theoretical approach cen-
tred on the agent instead of the more traditional abso-
lute reference system (Shneydor, 1998), gives insight
into rules-of-thumbfor both interception and collision
avoidance. The rules-of-thumb yield a simply imple-
mented natural behaviour, not necessarily an optimal
solution. The goal is for error-tolerant, not error-free,
behaviour. The rules do not depend on assumptions
of predictable behaviour by the targets or obstacles,
making them ideal for dynamic environments.
2 PROPORTIONAL NAVIGATION
The principle of CBDR states that a collision will oc-
cur with any object that: remains on a steady bearing
relative to one’s own direction of motion and has a
range that is decreasing. The principle is the founda-
tion of parallel, or proportional, navigation (PN). PN
Figure 3: Guided by an observer at O, The agent begins at
O and attempts to intercept T by maintaining a course along
the LOS (dashed line).
is used in missile guidance, by predators in the animal
world (Ghose et al., 2009), and by humans for driving
or catching balls (Shneydor, 1998).
Figure 3 shows a common representation of the in-
tercept problem. Assume a planar engagement where
a moving missile (agent or robot), A, seeks to inter-
cept a moving target (or goal), T. The angle, λ, is the
line-of-sight (LOS) between the agent and target mea-
sured with respect to the reference. θ is known as the
lead angle of the agent, while δ is the path angle of
the target.
Simplifying assumptions to facilitate an intercept
solution are that the target moves at constant speed in
a known direction. Successful interception can only
occur when the agent adjusts course to remain on the
LOS and overtakes the target. Naturally, as the target
moves, λ changes and so the agent must adjust its path
angle, θ+ λ, in order to remain on the LOS.
LOS navigation is applicable in a situation where
robot guidance is remotely provided by an observer.
In this sense, it is a “three-point” guidance scheme ap-
propriate for, say, radio controlled robots. The agents
of interest for this paper react autonomously to their
sensor inputs. In this sense, they have a “two-point”
guidance scheme.
An autonomous agent does not have third-party
guidance so the relative motion between the agent and
an object with which it may collide, is the most im-
portant measure. One reason why a self-referential
view is more valid for an autonomous agent is that an
absolute reference may not always be available nor
relevant. For example, a third-party observer may
not have complete information of both agent and tar-
get due to an obstruction. Second, agent sensors op-
erate relative to the agent and so inherently provide
such information. The translation of the principles of
LOS guidance to a two-point guidance scheme is de-
picted in Figure 4. An agent “A” (green) and a target
SEEKING AND AVOIDING COLLISIONS - A Biologically Plausible Approach
241
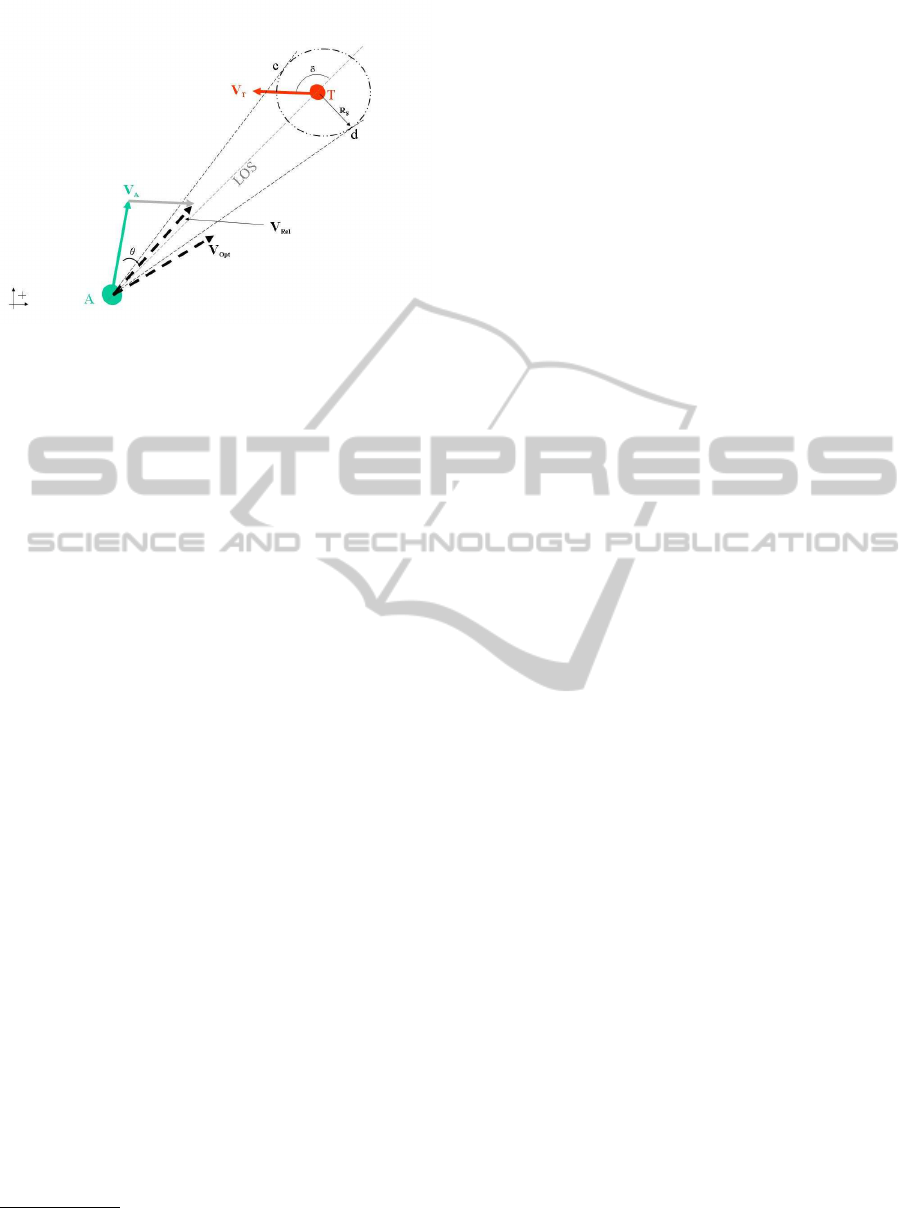
Figure 4: A simple system of typical variables for a col-
lision avoidance or interception in a rotating frame of co-
ordinates. For Proportional Navigation, all variables are
assumed to be known hence it is possible to calculate the
relative velocity, V
Rel
, and seek an optimal desired velocity,
V
Opt
,that lies outside the collision cone (△
Acd
).
“T” (red) are shown in an arbitrary dynamic relation-
ship similar to that of Figure 3. The agent is moving
with velocity V
A
and the target with velocity V
T
. The
agent attempts to maintain the LOS at an angle θ to
achieve interception of the target. An optimal solu-
tion is possible under the assumption of perfect infor-
mation.(Shneydor,1998)
Collision avoidance is the opposite of interception
where a change of θ is induced in order to avoid in-
terception. The relative velocity is determined and,
if it lies within the “collision cone”
1
, a lateral accel-
eration is provided to redirect the vector outside the
cone, V
Opt
.
The “proportional” in PN is that to effect a change
of relative velocity, the agent induces a lateral ac-
celeration proportional to the rate of change of θ.
Therefore the classical solution for PN guidance (also
known as True PN (Shneydor, 1998)) is:
a
A
L
= −KV
C
˙
θ (1)
where K is the navigation constant. Explicit values
for K can be found when constraints are put on target
manoeuvrability and velocity, otherwise one can con-
sider it an arbitrary constant. There are several slight
variants on the equation.(Shneydor, 1998; Zarchan,
1994)
3 PROBLEM OUTLINE
PN can be applied to collision avoidance by revers-
1
The collision cone is a triangle defined by the position
of the agent (vertex) and the points of intersection of two
lines tangent to a circle representing a “safe” radius, R
S
,
about the target.
ing the guidance laws that apply for intercept, that
is, inducing
˙
θ to generate a miss. It is typically as-
sumed an agent/robot will be in an intercept (some-
times referred to as “navigation”) mode while pro-
ceeding to a goal and then will switch to a collision
avoidance mode in the presence of obstacles meeting
some criteria. The principal challenges in using PN
have been: dynamic and/or multiple obstacles/targets
and high computational demands.
With the exception of Menon’s work on missile
guidance using fuzzy PN (Menon and Iragavarapu,
1998), approaches to robotic navigation assume: that
precise information is available to the agent, that com-
putational demands can be met, and/or that simplify-
ing assumptions of target motion are valid. These are
reasonable assumptions for aircraft (manned or oth-
erwise) with sophisticated sensor suites, but not for
small or more poorly equipped vehicles. Biological
organisms are unlikely to have such perfect knowl-
edge of targets. In this paper the following assump-
tions are made:
• target range, bearing, range rate (V
C
), and the
bearing rate (
˙
θ) are known within an error;
• target aspect and velocity are unknown and no as-
sumptions are made on either; and
• lateral acceleration is not applied explicitly but
indirectly through either a change in velocity or
bearing.
These assumptions are biologically plausible and
sufficient to allow a robust version of proportional
navigation.
4 RULES-OF-THUMB
In Figure 5, the geometry of the guidance problem is
recast to a purely agent-centric point of view. In such
a framework, proportional navigation distills to bal-
ancing the velocities of the agent and the target that
are perpendicular to the LOS (essentially the intent
of True Proportional Navigation or TPN (Shneydor,
1998)). Additionally, no assumptions are made, or re-
quired, about target behaviour, orientation, or veloc-
ities. Since the velocities perpendicular to the LOS
of the agent and target must remain equal for inter-
ception to occur, the agent must first detect when the
velocities are not equal and then apply some means
of compensation. The challenge is that V
T
, and hence
V
T⊥
, is not known.
In the first case, the agent needs to assess whether
there is a change in bearing angle,
˙
θ > 0, or range,
V
C
> 0. This mandates that the agent have at least
two consecutive “looks” at the target to obtain rate
ICAART 2012 - International Conference on Agents and Artificial Intelligence
242

Figure 5: In this simple system, guidance is considered
within a agent-centric frame of reference. A line-of-sight
(LOS) between an agent (A) and target (T) is defined with
respect to an agent’s heading. From this point-of-view, a
collision will occur if the velocity components perpendic-
ular to the LOS remain equal and the parallel components
sum to a positive value.
information. This will provide instantaneous rates of
change for both bearing and range.
In the second case, one must identify what options
there are for an agent to effect a change in V
A⊥
. The
following expresses the rate of change of the perpen-
dicular velocity in terms of agent heading and veloc-
ity.
V
A⊥
= V
A
· sinθ
dV
A⊥
dt
=
˙
V
A
· sinθ+ V
A
· cosθ·
˙
θ (2)
Changes to V
A⊥
can be effected by varying agent ve-
locity or applying a change of heading. The equation
(2) highlights the influence of the magnitude of θ. At
θ ∼ 90 degrees, the sinθ term dominates, while at an-
gles nearer to 0 or 180 degrees, the cosθ term domi-
nates. This implies that at times, changes in V
A
have
more effect on V
A⊥
while at others, changes in head-
ing have a greater effect. When combined with PN
principles, this insight yields simple rules-of-thumb
that can be used by an agent to produce a very natural
behaviour for collision avoidance and interception.
A first rule-of-thumb is the CBDR:
• A constant LOS bearing and closing velocity
indicate a collision is imminent.
This rule is the one that precipitates one of two
courses of action. In a collision avoidance mode, this
rule will signal that inducing a change in LOS bearing
is required. If the desired action is interception, then
this rule signals that no further changes are required
to the agent’s current state.
Other rules-of-thumb derived from Equation 2
are:
• If the LOS bearing is changing, and the
instantaneous LOS bearing is small (0
◦
≤
θ << 45
◦
), compensate by changing head-
ing.
• If the LOS bearing is changing, and the in-
stantaneous LOS bearing is large (45
◦
<<
θ ≤ 90
◦
), compensate by changing velocity.
• If the LOS bearing is changing, and the in-
stantaneous LOS bearing is approximately
45
◦
, either a change in heading or change
in bearing will suffice. The deciding factor
would be whether the agent has the energy
or ability to increase V
A
.
A less obvious rule that governs which direction to
turn to change heading is:
• For intercept: adjust heading in the same di-
rection as the bearing rate change. Do the
opposite for collision avoidance.
This means that for interception an agent will steer
in direction to minimize
˙
θ while for collision avoid-
ance, the intent is the opposite. This appears counter-
intuitive as it will mean that collision avoidance will
require possibly briefly steering towards the target’s
general direction.
In all cases, Equation 1to determine the magnitude
of bearing and velocity changes is used.
5 IMPLEMENTATION AND
RESULTS
The agent model (Figure 1) is destined to be used
in the OneSAF (Systems, 1998) and other Computer
Generated Forces (CGF) environments (Bourassa
et al., 2011). A simpler platform was used for algo-
rithm development consisting of Netlogo (Tisue and
Wilensky, 2004) and the R Programming Language
(R Development Core Team, 2011).
Netlogo is a 2-D, multi-agent, programmable
modeling platform used to create agents, render the
agent environment, and run simulations. It provides,
and manages, agent sensors and agent interactions.
Netlogo does not have a full suite of computational
libraries and so, in anticipation of future work, the R
Programming Language was coupled to Netlogo via
an extension (Thiele and Grimm, 2010). The rules
were then coded in R scripts and called by the agents
in the Netlogo environment.
A multi-agent environment was created with 2-30
agents each with a different initial course and speed.
The agents were divided into two groups with each
group having a goal that ensured that the groups must
SEEKING AND AVOIDING COLLISIONS - A Biologically Plausible Approach
243

cross paths enroute to their respective goals as well as
avoid fixed obstacles. Each agent was programmed:
• to proceed towards its goal (intercept using equa-
tion 1) unless there were other agents or obstacles
within sensor range;
• if other agents or obstacles were within sensor
range, assess whether the nearest represented a
collision danger; and
• apply rules for collision avoidance (the negative
of equations 1).
The assessment of collision danger followed the first
rule of thumb. The nature of the Netlogo environ-
ment meant that bearing rates of zero could not oc-
cur. Implementation of the rule was done with vari-
ous threshold values for bearing rate over a range of
±0.2− 1.0.
2
Each agent had a “vision cone” and val-
ues of ±10
◦
to ±90
◦
were tried. These values were
chosen as roughly comparable to human vision. Ad-
ditionally, 10% Gaussian noise was added to all mea-
surements meaning that all agents operated with im-
perfect information as might be expected in a biologi-
cal organism. Finally, each agent had a maximum im-
posed on speed, acceleration, and bearing rate. These
substituted for factors such as turning-rate or vehicle
dynamics.
Figure 6 illustrates a simple collision scenario in-
volving six agents. Each of the maneuvering agents
has altered course to steer behind an oncoming agent.
Note that this involved no path planning nor was any
perfect information available to any agent about other
agents. The agents were further challenged with less
linear motion by introducing fixed obstacles. This
caused agent movement to be nonlinear and unpre-
dictable. Figure 7 shows agents threading their way
past obstacles and other agents while proceeding to
goals far above and far to the right of the screen cap-
ture. The algorithm called for intercept of the goal
in the absence of obstacles thus the agents altered be-
tween goal-seeking and collision avoidance. Finally,
a more congested view shown in Figure 8 shows more
intricate manoeuvering as well as the challenges of a
simulated environment. Here fourteen agents pursue
distant goals. The centre-most agent has threaded its
way effectively past an obstacle and a green agent.
The top, left-most agent has collided with a fixed ob-
stacle but this was an artifact of the way the environ-
ment is implemented in Netlogo.
2
This was one of several “tweaks” of the algorithm im-
posed by the nature of the simulation environment used.
Another was that the division of the “world” in to patches
introduces artifacts into sensor performance.
Figure 6: Netlogo screen capture of six agents exercising
pure collision avoidance. Each of the maneuvering agents
altered course to steer behind an oncoming agent. No path
planning was involved. No information of the interfering
agents was provided except noisy range and bearing (see
text).
Figure 7: Netlogo screen capture of six agents exercising
collision avoidance while proceeding to intercept goals far
to the right and above the screen capture. Again no path
planning was involved and no perfect information was avail-
able. Agent vision was restricted to a 180
◦
cone centred on
the agents heading, with a radius of 15 patches.
6 DISCUSSION AND INSIGHTS
The results of the experiments were successful. De-
spite the simplicity of the algorithms, the behaviour of
the agents was natural. For example, agents slowed
down at times to allow others to pass, or steered
around agents that they overtook. Success with de-
graded sensor information highlighted that the algo-
rithm is not dependent on high quality or perfect in-
formation.
Collisions did occur but this should be viewed
in perspective. In the biological world, there are no
guarantees of interception nor collision avoidance. A
cheetah, for instance, is successful in chasing down
prey only 50% of the time (O’Brien et al., 1986) de-
spite an often significant speed advantage; a manoeu-
vering target is a difficult intercept challenge. Sim-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
244

Figure 8: Netlogo screen capture of fourteen agents exercis-
ing collision avoidance while proceeding to intercept goals
far to the right and above the screen capture. Note the com-
plex manoeuvering of the centre-most red agent.
ilarly, despite rigorous control of airspace and ship-
ping lanes, collisions do occur. The strength of the
algorithm is in: its simplicity, its applicability without
assumptions or excessive computation, and its robust-
ness to noise.
Target range and bearing rates can be combined
with known agent information to derive information
about the sensed environment, with simple sensors,
and without requiring global knowledge. For exam-
ple, if T were a stationary object and A were on a
fixed course and speed for severaltime iterations, then
T’s motion is entirely predictable, that is: it will pro-
ceed on a course parallel to A’s heading, and it’s range
rate will behave according to −V
A
cosθ. An even sim-
pler characterization, useful for formation movement,
is that any target maintaining the same distance and
bearing,
˙
θ = 0 andV
c
= 0, is moving at the same speed
and heading as the agent.
7 CONCLUSIONS
To satisfy the requirements for an agent model based
on motivation, a collision avoidance and interception
algorithm was developed using principles known to
be used by biological organisms. The algorithm used
basic target information obtainable by simple sensors:
range, bearing, range rate, and bearing rate. The
strength of the approach is that it is simple, robust
to noise, computationally undemanding, and biologi-
cally plausible. Its implementation is feasible in real
time, for real-world platforms with simple sensors.
An additional useful insight was the use of range rate
and bearing rate to characterize objects detected in the
environment.
This work is considered a proof-of-concept and
follow-on work in progress includes: using fuzzy
logic for rule implementation, implementation in the
OneSAF CGF, and an implementation in a mobile
robotic platform.
REFERENCES
Bourassa, M., Abdellaoui, N., and Parkinson, G. (2011).
Agent-based computer-generated-forces’ behaviour
improvement. In ICAART (2), pages 273–280.
Ghose, K., Triblehorn, J. D., Bohn, K., Yager, D. D., and
Moss, C. F. (2009). Behavioral responses of big brown
bats to dives by praying mantises. Journal of Experi-
mental Biology, 212:693–703.
Maslow, A. (1943). A theory of human motivation. Psy-
chological Review, 50:370–396.
Menon, P. and Iragavarapu, V. (1998). Blended hom-
ing guidance law using fuzzy logic. In AIAA Guid-
ance, Navigation and Control Conference, pages 1–
13, Boston, MA.
Millington, I. (2006). Artificial Intelligence for Games (The
Morgan Kaufmann Series in Interactive 3D Technol-
ogy). Morgan Kaufmann Publishers Inc., San Fran-
cisco, CA, USA.
O’Brien, S., Wildt, D., and Bush, M. (1986). The cheetah
in genetic peril. Scientific American, 254:6876.
R Development Core Team (2011). R: A Language and
Environment for Statistical Computing. R Foundation
for Statistical Computing, Vienna, Austria. ISBN 3-
900051-07-0.
Shneydor, N. (1998). Missile Guidance and Pursuit: Kine-
matics, Dynamics and Control. Horwood Series
in Engineering Science. Horwood Publishing Chich-
ester.
Systems, L. M. I. (1998). One-saf testbed baseline assess-
ment: Final report. Advanced distributed simulation
technology ii, Lockeed Martin Corporation. Commis-
sioned Report for NAWCTSD/STRICOM ADST-II-
CDRL-ONESAF-9800101.
Thiele, J. and Grimm, V. (2010). Netlogo meets r: Linking
agent-based models with a toolbox for their analysis.
Environmental Modelling and Software, 25(8):972 –
974.
Tisue, S. and Wilensky, U. (2004). Netlogo: A simple envi-
ronment for modeling complexity. In in International
Conference on Complex Systems, pages 16–21.
Zarchan, P. (1994). Tactical and Strategic Missile Guid-
ance, volume 157 - Progress in Astronautics and
Aeronautics of AIAA Tactical Misslie Series. Amer-
ican Institute of Aeronautics and Astronautics, Inc.,
2nd edition.
SEEKING AND AVOIDING COLLISIONS - A Biologically Plausible Approach
245
