
TURTLES AS STATE MACHINES
Agent Programming in NetLogo using State Machines
Ilias Sakellariou
Department of Applied Informatics, University of Macedonia, Thessaloniki, Greece
Keywords:
Agent simulation platforms, Agent programming languages.
Abstract:
Agent based modelling has received significant attention in the recent years mainly due its wide adoption by
scientists in a number of fields. Although agent simulation platforms have proven to be quite mature and
expressive for modelling simple agents, little has been done regarding enhancing these platforms by higher
level agent oriented programming facilities. This work aims at this direction, i.e. an add-on library to a well
known simulation platform aiming at the specification of complex high level agents, using state machines.
1 INTRODUCTION
Agent based modelling and simulation has been ex-
tensively used as a technique to study complex emer-
gent social and biological phenomena in many areas,
such as economics, biology, psychology, traffic and
transportation etc. (Davidsson et al., 2007). This
growing interest led to the introduction of a number
of agent modelling and simulation tools (Nikolai and
Madey, 2009).
NetLogo (Wilensky, 1999) is such a platform and
is regarded as one of the most complete and suc-
cessful agent simulation platforms (Railsback et al.,
2006). Although, excellent for developing reactive
agent simulations, it lacks the facilities to easily
model more complex agents. There is only one work
reported (Sakellariou et al., 2008) towards the latter,
that offered a framework for message exchange and a
simple mechanism for specifying persistent intentions
and beliefs (PRS like).
This paper presents the TSTATES (Turtle-States)
library that follows a different approach, similar to
those that have been used mainly in robotics and
RoboCup teams to control the behaviour of agents
(turtles), i.e. we describe the latter through a form
of state machines. TSTATES offers a domain specific
language to specify agent state machines and an exe-
cution layer for running such specifications in NetL-
ogo. Being able to encode more sophisticated NetL-
ogo agent models could extended the platform’s ap-
plicability to a number of domains.
2 NETLOGO STATE MACHINES
NetLogo can be an ideal platform for initial prototyp-
ing and simulation of multi-agent systems, provided
these systems have some spatial dimension and con-
sist of relatively simple agents that react to environ-
ment “events”. Three entities participate in a NetL-
ogo simulation: the observer, that initiates/controls
the simulation; patches, i.e. components of a grid
(world), and turtles that are agents that “live” and in-
teract in the world, which can be organised in breeds.
Both patches and turtles carry their own state, stored
in a set of system or user defined agent variables, that
allow modelling of complex environments and be-
haviours. Encoding agent behaviour is accomplished
in a domain specific programming language and rea-
soning about time is supported through ticks, each
corresponding to a discrete execution step. Finally,
tasks are a significant extension introduced in NetL-
ogo 5, that offer execution of code stored in a variable.
The TSTATES library aims at extending NetLogo
by allowing to encode agents controlled by state ma-
chines, in which transitions are labelled with by ac-
tions and have the following form:
(State, Condition
i
) ⇒ (Action
i
, Next State
i
)
The library supports encoding transitions like the
above in the following form:
state <StateName>
# when <Cond 1> do <Act 1> goto <Next_State 1>
...
# when <Cond i> do <Act i> goto <Next_State i>
end-state
In the above, a state definition is included between
375
Sakellariou I..
TURTLES AS STATE MACHINES - Agent Programming in NetLogo using State Machines.
DOI: 10.5220/0003753703750378
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 375-378
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

keywords
state
and
end-state
and the keywords
#
,
when
,
do
and
goto
specify a transition definition, a
condition, an action and the target state respectively.
A string representation of any valid NetLogo
boolean reporter (function) can act as a condition.
Thus the user can develop model specific agent “sen-
sors” or use platform supported reporters to trigger
transitions. Special library conditions include:
•
otherwise
that always evaluates to true,
•
for-n-ticks <n>
which evaluates to true for n
ticks after the state was last entered,
•
after-n-ticks <n>
which constantly evaluates
to true n ticks after the last activation of the state,
•
on-failure
and
on-success
are two special
conditions discussed below.
Similarly to conditions, actions are string repre-
sentations of any valid NetLogo procedure. This in-
tegration with the underlying platform, allows defini-
tion of agent “actuators” in the latter and organisation
of agent behaviour using state machines. The special
library action
nothing
defines transitions that are not
labelled with an action. Finally, states can share infor-
mation using turtle’s own variables, in a similar man-
ner as in (Konolige, 1997).
The keyword
goto
specifies the transition’s tar-
get state, one that belongs to the same state ma-
chine. Another kind of transition supported is that
of invoking a different state machine, using the
activate-machine
keyword. The library supports
the concept of callable state machines, i.e. machines
that can be invoked by a transition and terminate re-
turning a boolean result. The concept is similar to
nested functions, in the sense that when such a ma-
chine terminates, “control” returns to the state that
invoked the machine. Each callable state machine,
has to include at least a
success
or a
failure
pseu-
dostate to terminate its execution. Upon termina-
tion, the calling state can optionally activate transi-
tions on the result returned, by employing the spe-
cial
on-success
and
on-failure
transitions condi-
tions. Currently the implementation allows only one
such machine to be invoked by a single state and
nested invocations for machines can reach any level.
Callable machines can significantly reduce the num-
ber of states required and provide the means to define
agent template behaviours.
Within a state, the order of transitions is impor-
tant, since the execution layer evaluates conditions in
the order that they appear, firing the first transition
whose condition is satisfied. Transition ordering al-
lows behaviour encoding using less complex condi-
tions. A machine is a NetLogo list of state definitions,
with the first state in the list being the initial state.
2.1 Communicating MARS Explorer
To illustrate the use of the library, a modified ver-
sion of the Mars Explorer agent (Steels, 1990) is em-
ployed. In that a number of robotic vehicles (col-
lectors) have the task of exploring a distant planet
and collecting samples that have to bring back to a
base. The terrain has obstacles that must be avoided
and collectors themselves present obstacles to one an-
other. We assume that collectors are aware of the ex-
act location of the base. The agent model as a state
machine is shown in figure 1.
Avoiding an obstacle is a somewhat complex
behaviour according to which agents must try for
some time (10 ticks) to get far away from an obsta-
cle. If the agent succeeds in reaching a clear area
(with no
obstacle-around
) the behaviour (machine)
succeeds, otherwise the agent tries to “drive” clear
once more. This behaviour has to be invoked by
all states that involve moving around in the world
and thus it is encoded as a callable state machine
(
get-away-from-obstacles
), as shown in figure 1.
The corresponding TSTATES code is shown below:
to-report state-def-of-get-away-from-obstacle
report (list
state "finding-a-clear-space"
# when "detect-obstacle" do "change-heading"
goto "finding-a-clear-space"
# for-n-ticks 10 do "fd 0.2"
goto "finding-a-clear-space"
# otherwise do "nothing"
goto "check-space-cleared"
end-state
state "check-space-cleared"
# when "obstacle-around" do "nothing"
goto "finding-a-clear-space"
# otherwise do "nothing" success
end-state) end
Having a large number of collectors operating in
the environment, leads to a situation where all agents
compete in their attempt to reach the base to unload
samples. As a consequence a large number of agents
gather around the base, preventing each other from
achieving their goal. In order to prevent such a phe-
nomenon, a simple coordination mechanism was im-
posed using symbolic message exchange by employ-
ing the library described in (Sakellariou et al., 2008).
The coordination scheme is rather simple: the base
acts as a central authority and agents have to wait for
permission before moving to the base. When a collec-
tor drops off its samples, it notifies the base so that the
latter can grant permission to another waiting agent.
A fragment of the corresponding NetLogo code is
shown below. The name of the NetLogo reporter in-
dicates the breed of agents whose behaviour is spec-
ified. In the example, checking the same conditions
ICAART 2012 - International Conference on Agents and Artificial Intelligence
376
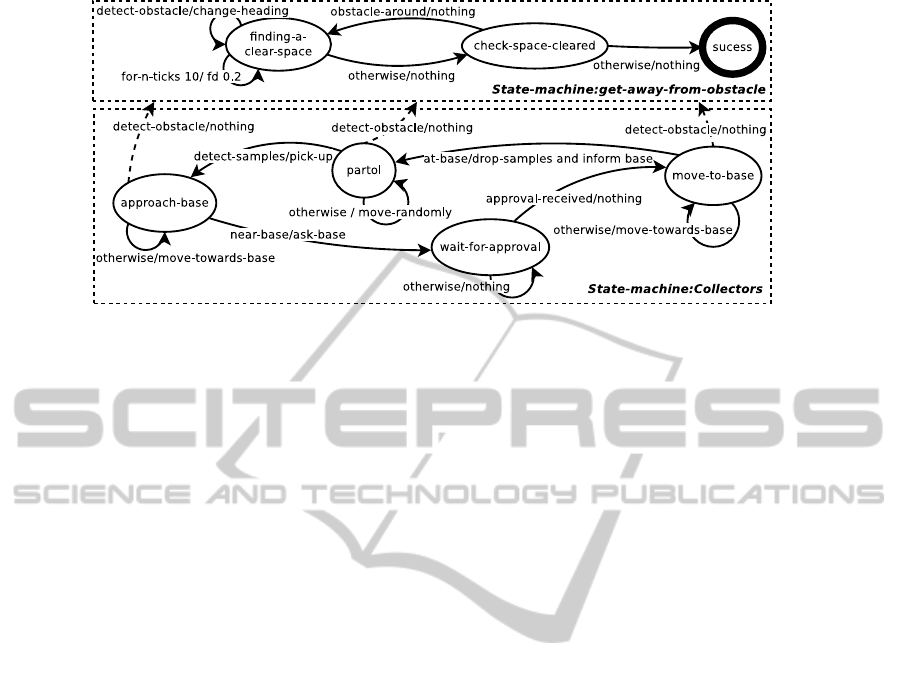
Figure 1: The cooperative Mars collector agent. The state machine above servers as a good example of reusability, since the
get-away-from-obstacle behaviour is reused in three other states.
twice at state “move-to-base” is avoided by exploit-
ing the transition ordering and the
otherwise
special
condition. As seen from the code, encoding state ma-
chines in TSTATES is a straightforward task.
to-report state-def-of-collectors
report (list
state "patrol"
# when "detect-obstacle" do "nothing"
activate-machine "get-away-from-obstacle"
...
end-state
state "approach-base"
...
state "wait-approval"
...
state "move-to-base"
# when "detect-obstacle" do "nothing"
activate-machine "get-away-from-obstacle"
# when "at-base" do "drop-samples inform-base"
goto "patrol"
# otherwise do "move-towards-base"
goto "move-to-base"
end-state) end
2.2 Implementation
We choose to implement the TSTATES library in the
NetLogo programming language, mainly due to the
fact that such a choice allows its effortless inclusion in
any NetLogo model, and easy modification of the li-
brary primitives offered. The implementation heavily
depends on the notion of tasks: each machine speci-
fication is encoded by the user as a NetLogo reporter
that is transformed to an executable form (task) by ap-
propriate function invocations and stored in the corre-
sponding data structures.
For each turtle that uses state machines, three
stacks are defined as turtle’s own variables: (a) the
active-states stack that holds the set of states that have
not yet terminated along with necessary information
concerning each state; the active-states-code stack
that holds the corresponding code for each state, and;
(c) the active-machines stack that stores the state ma-
chine to which each state in the active states stack cor-
responds to. Obviously the top of each of the stacks
determines the behaviour of the agent.
The library procedure
execute-state-machine
is the only thing that needs to be called by the tur-
tle to execute its specified behaviour. The first time
the procedure is invoked, it loads the initial state of
the machine that matches the breed of the turtle. The
procedure executes only one action at each cycle, a
necessity imposed by the fact that the ask turtles Net-
Logo primitive imposes a sequential order on the ex-
ecution of agents, waiting for one to finish before ini-
tiating the next. Additionally, ticks would not work
otherwise.
3 RELATED WORK
Many approaches reported in the literature adopt fi-
nite state machines to control agent behaviour. For
example in (Loetzsch et al., 2006) (Risler and von
Stryk, 2008) authors describe a specification lan-
guage, XABSL for defining hierarchies of state ma-
chines concerning complex agent behaviours in dy-
namic environments. According to the approach, op-
tions, i.e. state machines, are organised through suc-
cessive invocations in a hierarchy, an acyclic graph
consisting of options, with the leaf nodes being ba-
sic behaviours (actions). Traversal of the tree based
on external events, state transition conditions and past
option activations, leads to a leaf node that is an ac-
tion. XABSL was employed by the German RoboCup
robot soccer team with significant success.
TURTLES AS STATE MACHINES - Agent Programming in NetLogo using State Machines
377

COLBERT (Konolige, 1997) is an elegant C like
language defining hierarchical concurrent state ma-
chines. It supports execution of activities (i.e. finite
state automata) that run concurrently possibly invok-
ing other activities and communicate through a global
store or signals. Agent actions include robot actions
and state changes, and all agent state information is
recorded in the Saphira perceptual space. eXAT (Ste-
fano and Santoro, 2005) models agent tasks using
state machines, that can be “activated” by the rule
engine of the agent. eXAT tasks can be combined
sequentially or concurrently, allowing re-usability of
the defined state machines. Fork and join operators
on concurrent state machine execution exist that al-
low composition of complex tasks.
TSTATES library provides some of the above
mentioned features and lacks others. State
machine invocation is possible through the
activate-machine
primitive, but concurrent
execution as that is defined in COLBERT and XABSL
is missing. Concurrent actions, although clearly
a desired property in a real-world robotic system,
might not be suitable for agent simulation platforms
and especially for NetLogo. In the latter, fairness
among agents in the simulation is provided by
ensuring that at each cycle one action is executed.
However, having multiple concurrent active states is
a future direction of the TSTATES library, possibly
incorporating some sort of priority annotation on
the actions that would allow at the end to have a
single action as the outcome of the process. Finally,
although similar agent behaviours could be encoded
in the RePast (North et al., 2007) agent simulation
platform, such a task would require more effort by
a scientist not familiar with JAVA programming to
create an experiment.
4 CONCLUSIONS
The TSTATES library is a first attempt to a more so-
phisticated control of NetLogo turtles, that presents
a number of benefits: simple behaviour specification
and seamless integration with the NetLogo language
primitives, resulting in no expressivity loss w.r.t. the
agent models that can be encoded. We intend to ex-
tend the current approach in a number of ways:
• support the execution of concurrent active states
and possibly fork and join composition operators
on machine invocation,
• investigate how state machine behaviours can
be combined with concepts of current BDI ap-
proaches to programming agents, (as in eXAT),
• provide debugging facilities in NetLogo.
As a final note, simulation platforms can be an
good testbed for the initial evaluation of new agent
programming languages, since they allow their as-
sessment in gradually more sophisticated “complete”
agent environments.
REFERENCES
Davidsson, P., Holmgren, J., Kyhlbck, H., Mengistu, D.,
and Persson, M. (2007). Applications of agent based
simulation. In Multi-Agent-Based Simulation VII,
volume 4442 of Lecture Notes in Computer Science,
pages 15–27. Springer Berlin / Heidelberg.
Konolige, K. (1997). Colbert: A language for reactive con-
trol in sapphira. In KI:Advances in Artificial Intel-
ligence, volume 1303 of Lecture Notes in Computer
Science, pages 31–52. Springer.
Loetzsch, M., Risler, M., and Jungel, M. (2006). Xabsl
- a pragmatic approach to behavior engineering. In
Intelligent Robots and Systems, 2006 IEEE/RSJ Inter-
national Conference on, pages 5124 –5129.
Nikolai, C. and Madey, G. (2009). Tools of the trade:
A survey of various agent based modeling platforms.
Journal of Artificial Societies and Social Simulation,
12(2):2.
North, M. J., Howe, T. R., Collier, N. T., and Vos, J. R.
(2007). A declarative model assembly infrastructure
for verification and validation. In Advancing Social
Simulation: The First World Congress. Springer, Hei-
delberg, FRG.
Railsback, S. F., Lytinen, S. L., and Jackson, S. K. (2006).
Agent-based simulation platforms: Review and devel-
opment recommendations. SIMULATION, 82(9):609–
623.
Risler, M. and von Stryk, O. (2008). Formal behavior speci-
fication of multi-robot systems using hierarchical state
machines in XABSL. In AAMAS08-Workshop on For-
mal Models and Methods for Multi-Robot Systems.
Sakellariou, I., Kefalas, P., and Stamatopoulou, I. (2008).
Enhancing Netlogo to Simulate BDI Communicating
Agents. In Artificial Intelligence: Theories, Models
and Applications, volume 5138 of Lecture Notes in
Computer Science, pages 263–275. Springer Berlin /
Heidelberg.
Steels, L. (1990). Cooperation between distributed agents
through self-organisation. In Towards a New Fron-
tier of Applications, Proceedings of the IEEE Inter-
national Workshop on Intelligent Robots and Systems
(IROS’90), pages 8–14.
Stefano, A. and Santoro, C. (2005). Supporting agent devel-
opment in Erlang through the eXAT platform. In Soft-
ware Agent-Based Applications, Platforms and De-
velopment Kits, Whitestein Series in Software Agent
Technologies and Autonomic Computing, pages 47–
71. Birkhuser Basel.
Wilensky, U. (1999). Netlogo. Center for Con-
nected Learning and Computer-based Mod-
elling. Northwestern University, Evanston, IL.
http://ccl.northwestern.edu/netlogo.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
378
