
EFFICIENT COMPUTATION OF VORONOI NEIGHBORS BASED
ON POLYTOPE SEARCH IN PATTERN RECOGNITION
Juan Mendez
1
and Javier Lorenzo
2
1
Dept. Informatica y Sistemas, Univ. Las Palmas de Gran Canaria, Las Palmas, Spain
2
IUSIANI, Univ. Las Palmas de Gran Canaria, Las Palmas, Spain
Keywords:
Pattern Recognition, Machine Learning, Nearest Neighbors, Voronoi adjacency, Linear programming.
Abstract:
Some algorithms in Pattern Recognition and Machine Learning as neighborhood-based classification and
dataset condensation can be improved with the use of Voronoi tessellation. The paper shows the weakness
of some existing algorithms of tessellation to deal with high dimensional datasets. The use of linear pro-
gramming can improve the tessellation procedures by focusing in Voronoi adjacency. It will be shown that
the adjacency test based on linear programming is a version of the polytope search. However, the polytope
search procedure provides more information than a simple Boolean test. The paper proposes a strategy to use
the additional information contained in the basis of the linear programming algorithm to obtain other tests.
The theoretical results are applied to tessellate several random datasets, and also for much-used datasets in
Machine Learning repositories.
1 INTRODUCTION
Pattern Recognition(PR) and Machine Learning (ML)
are disciplines where the knowledge about the spa-
tial organization of the data can improve the perfor-
mance of the learning and classification procedures.
Voronoi and Delaunay tessellations provide partitions
of some representation spaces useful in applications
concerning the spatial organization of data collec-
tions. The tessellation process makes a partition of
the space in disjunct regions or cells called Delaunay
or Voronoi polytopes/polyhedra. Unfortunately De-
launay/Voronoi based approaches have not been very
successful in PR and ML (if compared with Statis-
tical one) because the computational complexity of
these methods. When the attributes that define each
instance of the dataset are defined in R, every instance
can be represented as a point in R
n
, where n is the di-
mensionality of the problem. Thus, the processing of
datasets with real attributes can exploit their geomet-
rical equivalence and take advantage of many well-
founded geometrical procedures.
Many PR procedures, for example Neighborhood-
based Classification or Dataset Condensation, only
need the adjacency relations between instances in-
stead of full details of Voronoi or Delaunay tessel-
lations. The Voronoi adjacency deals with the prob-
lem of checking if a pair of training instances have a
common boundary, that is if both are neighbors in the
Voronoi tessellation.
The Nearest Neighbor (NN) and k-NN are the
most used algorithms in the family of neighborhood-
based procedures. Voronoi based is only a category of
search procedures in spaces that are coded by means
data structures, as Delaunay/Voronoi or other spatial
related threes (Navarro, 2002). The k parameter in k-
NN is usually chosen by means of a cross-validation
process over the training samples (Duda et al., 2001).
Instead of using a fix k value for the whole dataset,
it will be useful to define a neighborhood that lo-
cally adapts to the data without the need for cross-
validation (Gupta et al., 2008; Chin et al., 2007). The
natural neighbors for a test point q can be defined
from the Voronoi tessellation of the training set as the
set of training instances p
i
whose Voronoi cell con-
tains (or are adjacent to the cell containing) q. This
definition follows the previously introduced by Sib-
son (Sibson, 1981) and Gupta et alt (Gupta et al.,
2008). The natural neighbors are in a subset of in-
stances that encloses or surrounds the test point.
Procedures of dataset editing, pruning or con-
densing are useful in ML applications where mas-
sive dataset are used to train practical classifiers, eg.
SVM or Neural Networks. In such cases volumes of
the training sets are drastically reduced with low or
null loss in the information. The condensation pro-
357
Mendez J. and Lorenzo J. (2012).
EFFICIENT COMPUTATION OF VORONOI NEIGHBORS BASED ON POLYTOPE SEARCH IN PATTERN RECOGNITION.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 357-364
DOI: 10.5220/0003755703570364
Copyright
c
SciTePress
−2 −1 0 1 2 3 4 5
−2
−1
0
1
2
3
4
5
x
y
p
1
p
2
p
3
p
4
p
5
p
6
q
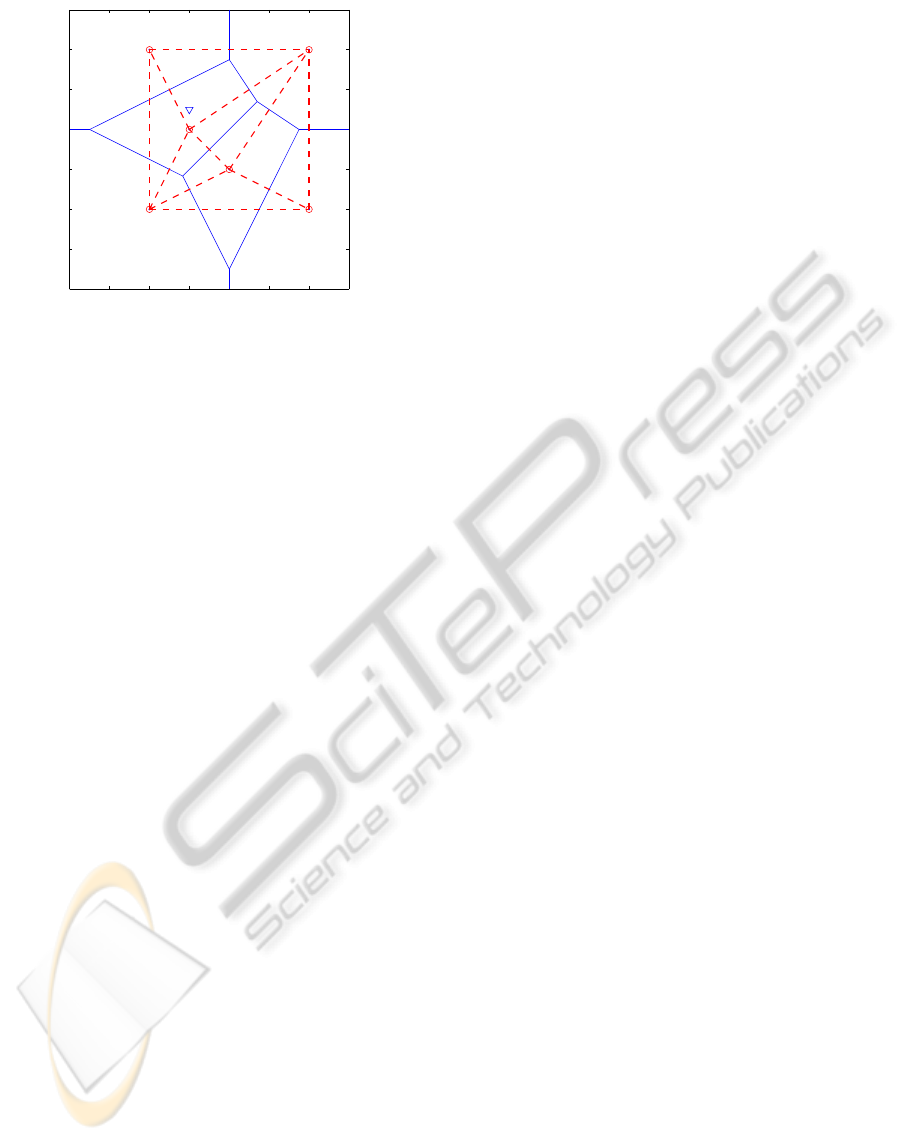
Figure 1: A simple dataset(Fukuda, 2004),
P = {(0,0),(2,1),(1,2),(4,0),(0,4),(4,4)}, showing
the Voronoi polyhedra as well as the Delaunay polytopes.
The nearest neighbor of point q is p
3
and its natural
neighbors are: {p
1
,p
2
,p
3
,p
5
,p
6
}.
cedures that are decision-boundary consistent (Bhat-
tacharya et al., 1992; Duda et al., 2001) based on
Voronoi adjacency do not modify the boundary be-
tween classes. Therefore, any improvement in the
computation of the Voronoi tesselation will imply a
reduction in the computational cost of any procedure
that can be obtained from this tesselation as the k-
NN. In this approach of using spatial information
provided by Dlaunay/Vornoy methods is clustering
method(Koivistoinen et al., 2006) is an agglomera-
tive clustering algorithm which access density infor-
mation by constructing a Voronoi diagram for the in-
put samples.
The Voronoi tessellation procedure uses the met-
ric distance to define the boundary planes between
regions or cells. Metric distance, as well as vector
norm, only can be used on spaces with a metric struc-
ture. However, many applications in ML deal with
data collections without such a level of structured do-
mains. One way to transform the experimental raw
space in a metric space is to use the statistical Ma-
halanobis distance (Web, 2002). An equivalent ap-
proach is the use of an orthonormal linear transforma-
tion as performed in the Karhunen-Loewe (KL) trans-
formation (Web, 2002). In this case, the Euclidean
distance in the transformed space is equivalent to the
Mahalanobis distance in the experimental space.
There are several methods to compute the Voronoi
and its dual the Delaunay tessellations (Watson, 1981;
Bowyer, 1981; Ramasubramanian and Paliwal, 1997).
Perhaps one of the more successful approaches is
the one based on representation in an extended space
by mapping the instances in R
n+1
, and attempting to
search their convex hull. The projection of the so-
lution in R
n
generates the tessellation. The greatest
problem with the computation of Voronoi tessella-
tion is the computational complexity. For a dataset
with m instances it is in O(mlogm) for 2D cases,
and for a space with dimension n, it is in O(m
n/2
)
in the general case (Gupta et al., 2008; Barber et al.,
1996), which is clearly exponential with the problem
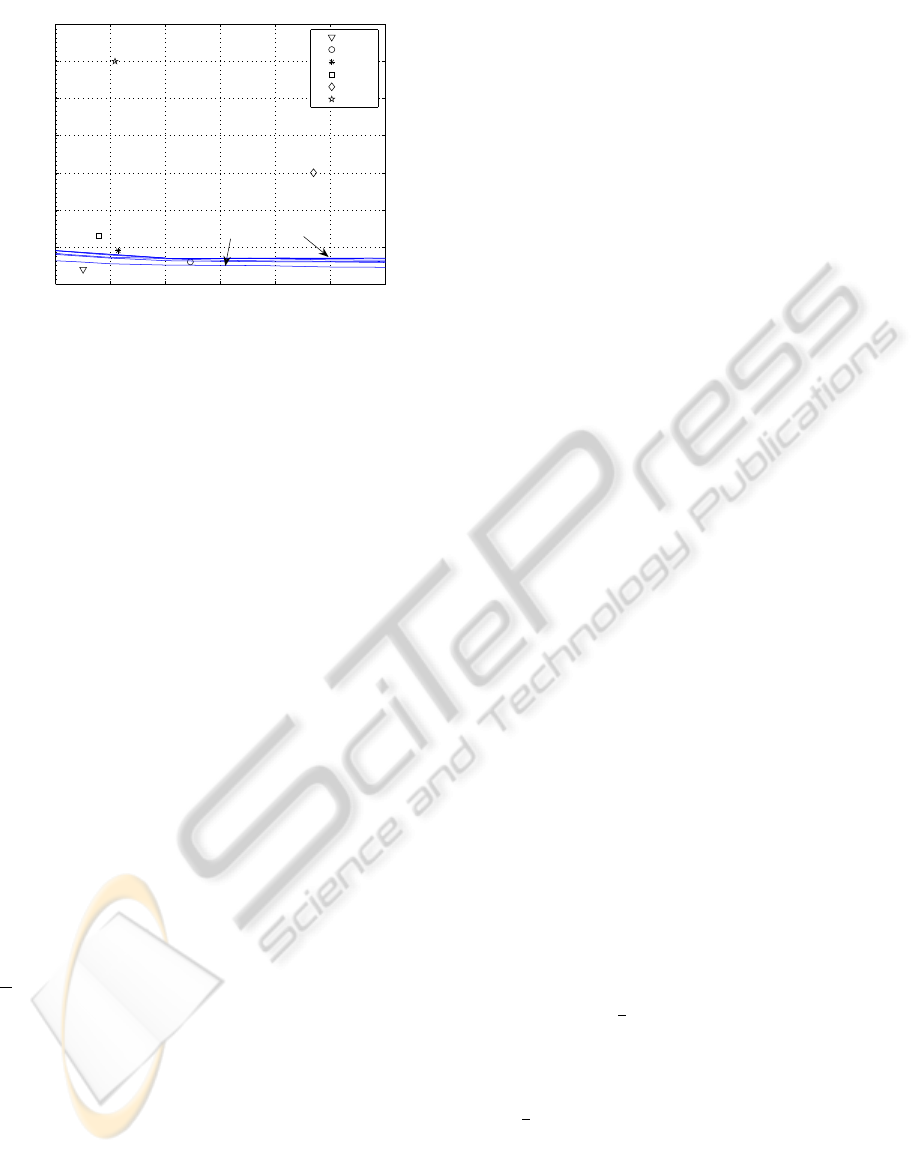
dimensionality. Figure 2 shows the results of the pro-
gram qvoronoi, a member of the qhull package (Bar-
ber et al., 1996), for some UCI datasets(Asuncion and
Newman, 2007). It is highly efficient in computing
low dimensional datasets, but can not tessellate high
dimension datasets.
The computational complexity of Voronoi tes-
sellations can be reduced with the use of Grabriel
graphs(Gabriel and Sokal, 1969), which have been
used as lower cost alternatives for Voronoi adja-
cency (Aupetit, 2003; Aupetit and Catz, 2005). How-
ever, Gabriel graphs are subsets of Voronoi graphs
and do not provide the full information about neigh-
boring relations.
Computing the Voronoi or Delaunay tessellation
in higher dimensional spaces can become unpracti-
cal. However, computing only the Voronoi adjacency
can be done very efficiently by using Linear Pro-
gramming(LP)(Fukuda, 2004). The relationship be-
tween Voronoi and LP problems has a sound theoret-
ical background (Agrell, 1993; Kalai, 1997; Fukuda
et al., 1997; Avis and Fukuda, 1992; Bremner et al.,
1997) and can be continually improved with the ad-
vances in computer hardware because Linear Pro-
gramming (LP) can be efficiently programmed in ma-
trix processors as GPUs(Greeff, 2005) and multipro-
cessor systems(Yarmish and van Slyke, 2001).
As it was stated above, any reduction in the com-
putation of the Voronoi adjacency will imply an im-
provement in methods like the k-NN and condensa-
tion techniques. The aim of this paper is to present
a method for an efficient computation of the Voronoi
adjacency graph. This computation is based on Lin-
ear Programming and it introduces some innovations
over papers previously referenced. The first one is
the modification of the Voronoi adjacency test pro-
posed by Fukuda (Fukuda, 2004) by showing that it
can be reduced to the polytope search procedure. The
second innovation is to show that the use of the dual
problem (Winston, 1994; Bazaraa et al., 1990) of the
adjacency test brings computational advantages. And
last innovation, but not least, the proposal of an ad-
jacency search strategy without backtracking. This
strategy assures the computation of the correct value
for all adjacency pairs without needing the computa-
tion of adjacency test for all the pairs.
The paper is structured as follows, firstly, the adja-
cency test for an instance pair is formulated, modified
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
358
100 200 300 400 500 600 700
0
10
20
30
40
50
60
70
m (instance number)
n (space dimension)
iris
bupa
glass
wine
wdbc
sonar
qvoronoi: [1,10,20,50,100,200] secs.
Figure 2: Efficiency area of qvoronoi and its relation with
some of most used datasets in ML. It is very efficient, but
only for low dimensionality problems.
and transformed to its dual form. Then, the proce-
dure of polytopesearch is formulated and transformed
to its dual form. It will be shown that the adjacency
test is a version of the polytope search. However, the
polytope search procedure provides more information
than a simple Boolean test. The paper proposes a
strategy to use the additional information contained in
the basis of the linear programming algorithm to ob-
tain other tests. The experiments were realized with
both artificial and real datasets. Real datasets with nu-
merical features were taken from the UCI repository
to allow comparisons with the results presented in this
work.
2 EFFICIENT COMPUTATION OF
VORONOI ADJACENCIES
One way to compute the Voronoi polyhedron of a
dataset P = {p
1
,...,p
m
} in R
n
is based on the con-
struction of an extended paraboloid representation in
R
n+1
. If x ∈ R
n
, the n + 1 paraboloid coordinate is:
x
n+1
=
∑
x
2
1
+,··· ,+x
2
n
= kxk
2
. If p
ij
are the co-
ordinate values of p
i
, its extended representation is:
p
i
= (p
i1
,..., p
in
,kp
i
k
2
). The set of tangent (n + 1)-
planes in every instance of the dataset generates a
polyhedron whose projection in R
n
is the Voronoi di-
agram (Fukuda, 2004). The polyhedron is defined by
the following set of linear equations:
2
n
∑
j=1
p
ij
x
j
− x
n+1
≤ kp
i
k
2
i = 1,...,m (1)
The adjacency of two instances p
a
and p
b
is ver-
ified if they have a common separating plane in R
n
,
therefore, the tangent planes in R
n+1
in each instance
have an intersection and a common edge. This con-
dition is verified if a solution exits for the following
linear system:
2
∑
n
j=1
p
ij
x
j
− x
n+1
≤ kp
i
k
2
i 6= a,b
2
∑
n
j=1
p
aj
x
j
− x
n+1
= kp
a
k
2
2
∑
n
j=1
p
bj
x
j
− x
n+1
= kp
b
k
2
(2)
This feasibility test of this linear system is related
to the solution of the following problem of linear pro-
gramming, where f() is an objective function subject
to the following constraints:
maximize f(x
1
,...,x
n
,x
n+1
)
2
∑
n
j=1
p
ij
x
j
− x
n+1
≤ kp
i
k
2
i 6= a,b
2
∑
n
j=1
p
aj
x
j
− x
n+1
= kp
a
k
2
2
∑
n
j=1
p
bj
x
j
− x
n+1
= kp
b
k
2
(3)
This problem can be solved by introducing slack
and surplus variables and using the Two-Phase
Method(Winston, 1994). The feasibility of this prob-
lem is obtained in the first phase by solving the next
linear problem, whose goal is the minimization of the
sum of all the surplus variables:
minimize Z = s
a
+ s
b
2
∑
n
j=1
p
ij
x
j
− x
n+1
+ s
i
= kp
i
k
2
i = 1,...,m
s
i
≥ 0 i = 1,...,m
(4)
The feasibility test for the original problem of
Equation (2) is that the optimal solution become null,
Z
∗
= 0, equivalent to: s
∗
a
= s
∗
b
= 0. This problem can
be modified as:
minimize Z
′
=
∑
n
j=1
(p
aj
+ p
bj
)x
j
− x
n+1
2
∑
n
j=1
p
ij
x
j
− x
n+1
≤ kp
i
k
2
i = 1,...,m
(5)
Where −Z = 2Z
′
− kp
a
k
2
− kp
b
k
2
, and the slack
and surplus variables have been hidden. The linear
programming dual of this problem is:
minimize Z
′′
=
∑
m
i=1
kp
i
k
2
z
i
∑
m
i=1
p
ij
z
i
=
1
2
(p
aj
+ p
bj
) j = 1,...,n
∑
m
i=1
z
i
= 1
z
i
≥ 0 i = 1,...,m
(6)
The optimal solution of the dual must be: Z
′′∗
=
Z
′∗
=
1
2
(kp
a
k
2
+ kp
b
k
2
).
2.1 Polytope Search
Voronoi polyhedra can be unbound, but a bounded
polyhedron is called a polytope. Delaunay poly-
topes are the dual of Voronoi polyhedra. The test
EFFICIENT COMPUTATION OF VORONOI NEIGHBORS BASED ON POLYTOPE SEARCH IN PATTERN
RECOGNITION
359

for Voronoi adjacency, as defined in Equation (6), is
related to the problem of the polytope search. This
problem is related to find the Delaunay polytope that
encloses a test point q ∈ R
n
: more precisely, in obtain-
ing the subset of the dataset instances which define
the polytope enclosing the test point. The polytope
degree ranges from 1 to n + 1 depending on the num-
ber of instances included, or the degree of degeneracy
of the polytope. Unfortunately, not all the polytopes
found are of the biggest degree of (n+ 1), however, a
lower degree provides valuable information because a
k-polytope includes k(k − 1)/2 Voronoi adjacencies.
If we are trying to find the enclosing polytope of a
point q, the problem can be solved by using linear
programming and finding the solution for y
0
∈ R and
y ∈ R
n
verifying(Fukuda, 2004):
minimize Z = y
0
+
∑
n
j=1
q
j
y
j
−y
0
−
∑
n
j=1
p
ij
y
j
≤ kp
i
k
2
i = 1,...,m
(7)
The Delaunay polytope containing the test point is
the one whose corresponding inequalities are satisfied
as equality when the problem reaches optimal. That
is, whose dual variables are not null. This linear pro-
gramming algorithm has two different stop states. In
the first, the enclosing polytope is found if the prob-
lem reaches the optimality. In the second one, the
problem gets unbound and no solution is provided be-
cause the test point is outside the convex hull of the
dataset instances. If the solution is optimal but degen-
erate, a k-polytope is obtained with 1 ≤ k ≤ n+1. The
enclosing polytope can be obtained easily by solving
the dual of the Equation (7):
minimize W =
∑
m
i=1
kp
i
k
2
z
i
∑
m
i=1
p
i
z
i
= q
∑
m
i=1
z
i
= 1
z
i
≥ 0 i = 1,...,m
(8)
If the test point is outside the convex hull, the
problem in Equation (7) becomes unbound, while its
dual in Equation (8) becomes unfeasible. If the prob-
lem is not degenerate, the number of non-null prob-
lem variables z ∈ R
m
is n+ 1 that define the enclosing
Delaunay polytope. If the problem is degenerate the
number of non-null variables is lower. However the
number of problem variables in the final basis pro-
vides some additional information: if a problem vari-
able is null but is included in the final basis, we can in-
fer that the k-polytope is a subset of a (k+1)-polytope
defined by k non-null variables and this null one that
also is included in the basis. Therefore, knowledge of
the final basis provides extra information in cases of
degeneracy.
For computational purposes the polytope search
procedure can be express as: B ← POLYTOPE(P,q).
Where B is the set of instances in P included in the
basis of the linear programming. The scalar K =
card(B) is an upper bound of the polytope degree, it
verifies: 1 ≤ k ≤ K ≤ n+1. When the test point is out-
side the convex hull, we get K = 0 for computational
purpose. The Voronoi adjacencytest for two instances
in a dataset in Equation (6) corresponds to the poly-
tope search procedure in Equation (8) by testing the
middle point between the pair: q =
1
2
(p
a
+ p
b
). This
test point is always within the convex hull, therefore
the unfeasible solution is not possible.
A Voronoi adjacency graph is constructed by tak-
ing each dataset instance as a node and the Boolean
link v
ij
∈ {0, 1} as the value of the adjacency test be-
tween instances p
i
and p
j
. The test for every middle
point assures knowledge of the v
ij
value, but in ev-
ery test also other v
hl
link values are also obtained
depending on the cardinality of B. In the best case,
a number of: n(n+ 1)/2+ 1 links of the Voronoi ad-
jacency graph are obtained. In the worst case only a
link value is obtained: it occurs when the middle point
of two instances p
i
and p
j
is just another instance of
the dataset q = p
h
. The best case happens when the
middle point is within a Delaunay polytope that does
not include the test pair. In this case K = n+ 1, there-
fore, n(n+ 1)/2 links with true values are obtained as
well as a false one: v
ij
= 0. The Algorithm 1 shows
the proposed procedure. It initialize all the links to
false values and only positive adjacencies are added
throughout the following steps. Table 1 contains a
trace of the computed pairs for dataset in Figure1,
where the values for the basis variables are shown.
2.2 Gabriel Adjacency
Gabriel adjacency is a subset of Voronoi adjacency,
its definition resembles the general definition of De-
launay polytope. A set of (n + 1) instances defines a
Delaunay polytope if the n-sphere that they describe
has no instance into. While, two instances are Gabriel
neighbors (Devroye et al., 1996) if no other instance
is included in the n-sphere that is centered in the mid-
dle point:
1
2
(p
a
+ p
b
) and has a radius:
1
2
kp
a
− p
b
k,
that is:
kp
i
−
1
2
(p
a
+ p
b
)k ≥
1
2
kp
a
− p
b
k ∀i 6= a,b (9)
Based on: ku− vk
2
= kuk
2
+ kvk
2
− 2u· v, it can
be simplified as:
p
i
· p
i
− p
i
· p
a
− p
i
· p
b
+ p
a
· p
b
≥ 0 ∀i 6= a,b (10)
The Delaunay test, which involves n+ 1 instances
to define the sphere, is more expensive than the
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
360

Algorithm 1: Computes the Voronoi adjacency graph. The input is the dataset instances, P = p
1
,. .., p
m
, and the output the
graph, V = {v
ij
}.
procedure ADJACENCY1(P = p
1
,. .. ,p
m
,V = {v
ij
})
Initialize: ∀
ij
,v
ij
← 0
for i ← 1,m− 1 do
for j ← i+ 1,m do ⊲ only the upper triangular
if v
ij
= 0 then
q ←
1
2
(p
i
+ p
j
) ⊲ the middle point between p
i
and p
j
B ←POLYTOPE(P,q) ⊲ gets the basis of the polytope
K ← card(B) ⊲ by solving Equation (8)
if K ≥ 2 then ⊲ if degeneracy: 1 ≤ K ≤ n+ 1
for h ← 1,K − 1 do
c ← B
h
for l ← h+ 1,K do
d ← B
l
v
cd
← 1 ⊲ p
c
and p
d
are Voronoi neighbors
v
dc
← 1 ⊲ and the symmetrical
Gabriel adjacency, which uses two instance to define a
smaller sphere. If an instance pair verifies the Gabriel
test, it also verifies the Voronoi neighbor test, but not
the converse. This property can be used to introduce
a cheaper but incomplete pre-test of adjacency.
The Gabriel test is advantageous if compared to
the general Delaunay test, but this advantage is un-
clear when compared with Voronoi adjacency ob-
tained with LP, because it provides only a link value
in every test. To increase the performance of the
polytope-based adjacency test, one algorithm is pro-
posed that use the cheaper Gabriel test. The Boolean
procedure GABRIEL(P, i, j) is used to test for the ad-
jacency of the instances p
i
and p
j
. In the Algorithm 2,
prior to the polytope test, a pre-test is included for
every instance. If the first test fails, the second one
computes the pairs values.
3 RESULTS
A systematic test have been performed to show the
strength and weakness of existing tessellation proce-
dures. One of the more used and faster packages is the
before mentioned qhull(Barber et al., 1996). To solve
several problems in computational geometry in R
n
, it
uses the computation of the convex hull in R
n+1
as the
kernel procedure. The family of programs based on
qhull are very fast for problems with low dimension-
ality. However, they suffer the curse of dimensional-
ity when applied in high dimension problems such as
those used in ML.
The test uses several random datasets whose in-
stances are within the unit cube centered at the origin.
The dimension used are: n = 2,3, . . . , 9, 10,20, . . .,70
and te number of instances is: m = 100,200, . . ., 700.
The computation time were taken from the program
qvoronoi, a member of the qhull package. To illus-
trate the obtained results for these datasets a contour
plot was generated as shown in Figure 2. Some val-
ues from 1 to 200 seconds are plot to illustrate the
efficiency area of the procedure efficiency. The num-
ber of dimensions and instances of some of the most
used dataset in the UCI Machine Learning Repos-
itory(Asuncion and Newman, 2007) as iris, bupa,
glass, wine, wdbc and sonar are also plotted. The
Figure shows that while bupa dataset (345 instances
and dimension 6) can be effectively tessellated in 5.76
sec. on a test computer (Intel Pentium M, 1.6 Ghz and
1 GB of RAM), the glass dataset (214 instances and
dimension 9) took several hours to complete. A prac-
tical conclusion were obtained, namely, that datasets
with a dimension greater than eight can not be tessel-
lated effectively with this procedure.
The Algorithm 1 defines how to compute the
Voronoi adjacencies, which are coded as a graph. The
Boolean links v
ij
∈ {0, 1} are symmetric: v
ij
= v
ji
,
therefore, only the upper triangular is computed. The
Algorithm was implemented in C++ using double pre-
cision real numbers. The same systematic test that
had been conducted for the qvoronoi was performed
for the implementation of the Algorithm 1. The con-
tour plot of the efficiency is shown in Figure 3. The
entire range of the UCI datasets is covered in the
range of 200 seconds in this test computer. The effi-
ciency area seems to covera more extended area in the
n vs. m plane, which allows to cover a wide-range of
practical ML applications. In low dimension datasets,
qhull significatively outperforms the proposed imple-
mentation, but for n ≥ 8, it is outperformed.
A performance factor is defined about how many
middle point tests are required to obtain all the ad-
jacency links of a dataset. The factor is defined as:
γ = 2N
test
/m(m− 1), where N
test
is the number of
EFFICIENT COMPUTATION OF VORONOI NEIGHBORS BASED ON POLYTOPE SEARCH IN PATTERN
RECOGNITION
361
Table 1: Computation of Voronoi neighbors for the dataset in Figure 1. The Algorithm 1 takes 8 test to compute the 15
adjacent pairs, and used N
s
= 24 iterations of Simplex Dual algorithm. The k parameter is the polytope degree, whereas K is
the number of z variables in the basis. The filled-in z variables are those in the basis.
pair q z
1
z
2
z
3
z
4
z
5
z
6
k K links N
s
1,2 1.0 0.5 0.50 0.50 2 2 v
12
2
1,3 0.5 1.0 0.50 0.50 2 2 v
13
2
1,4 2.0 0.0 0.50 0.00 0.50 2 3 v
12
,v
14
,v
24
3
1,5 0.0 2.0 0.50 0.00 0.50 2 3 v
13
,v
15
,v
35
3
1,6 2.0 2.0 0.40 0.40 0.20 3 3 v
23
,v
26
,v
36
3
2,5 1.0 2.5 0.75 0.19 0.06 3 3 v
35
,v
36
,v
56
4
3,4 2.5 1.0 0.75 0.19 0.06 3 3 v
24
,v
26
,v
46
4
4,5 2.0 2.0 0.40 0.40 0.20 3 3 v
26
,v
23
,v
36
3
Algorithm 2: A modification of Algorithm 1 that computes all the Grabriel pre-tests previously to the polytope ones.
procedure ADJACENCY2(P = p
1
,. .. ,p
m
,V = {v
ij
})
Initialize: ∀
ij
,v
ij
← 0
for i ← 1,m− 1 do
for j ← i+ 1,m do
if GABRIEL(P, i, j) then ⊲ tries Gabriel adjacency
v
ij
= 1
v
ji
= 1
for i ← 1,m− 1 do
for j ← i+ 1,m do ⊲ only the upper triangular
if v
ij
= 0 then
q ←
1
2
(p
i
+ p
j
) ⊲ the middle point between p
i
and p
j
B ←POLYTOPE(P,q) ⊲ gets the basis of the polytope
K ← card(B) ⊲ by solving Equation (8)
if K ≥ 2 then ⊲ if degeneracy: 1 ≤ K ≤ n+ 1
for h ← 1,K − 1 do
c ← B
h
for l ← h+ 1,K do
d ← B
l
v
cd
← 1 ⊲ p
c
and p
d
are Voronoi neighbors
v
dc
← 1 ⊲ and the symmetrical
Table 2: Tessellation results for several datasets coded in normalized coordinates after the KL transformation: T
q
the com-
putational time used by qvoronoi, T
1
the used by the proposed Algorithm 1, N
test
the number of middle points tested, N
s
the
number of Simplex iterations used to tessellate the whole dataset, and γ the performance factor. The T
2
column contains the
computational time for the Algoritm 2
Dataset n m T
q
(sec.) T
1
(sec.) N
test
N
s
γ T
2
(sec.)
iris 4 150 0.04 0.503 9349 96844 0.837 0.515
bupa 6 345 6.71 10.136 45891 783100 0.773 10.162
glass 9 214 n/a 2.708 9262 256613 0.406 2.733
wine 13 178 n/a 0.863 3082 69167 0.196 0.898
wdbc 30 569 n/a 58.886 18109 664385 0.112 61.358
sonar 60 208 n/a 6.003 5237 46555 0.243 6.752
tested pairs necessary to achieved the computation of
all Voronoi adjacencies. It depends of each dataset,
and in general would have a general dependence on m
an n. Low factor values are equivalent to high tessel-
lation performance, because its inverse provides the
average number of adjacency relations obtained for
each test. The tessellation cost not only depends on
the size of dataset m and n, it also depends on the dis-
tribution of instances. The Table 2 contains the com-
putation time for the ML Repository datasets, as well
as the N
test
and the Simplex iterations used. Normal-
ized coordinates are used after the KL transformation
because raw data coordinates are meaningless when
used in a metric distance.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
362
100 200 300 400 500 600 700
0
10
20
30
40
50
60
70
m (instance number)
n (space dimension)
iris
bupa
glass
wine
wdbc
sonar
[1,10,20,30,50,100,200] secs.
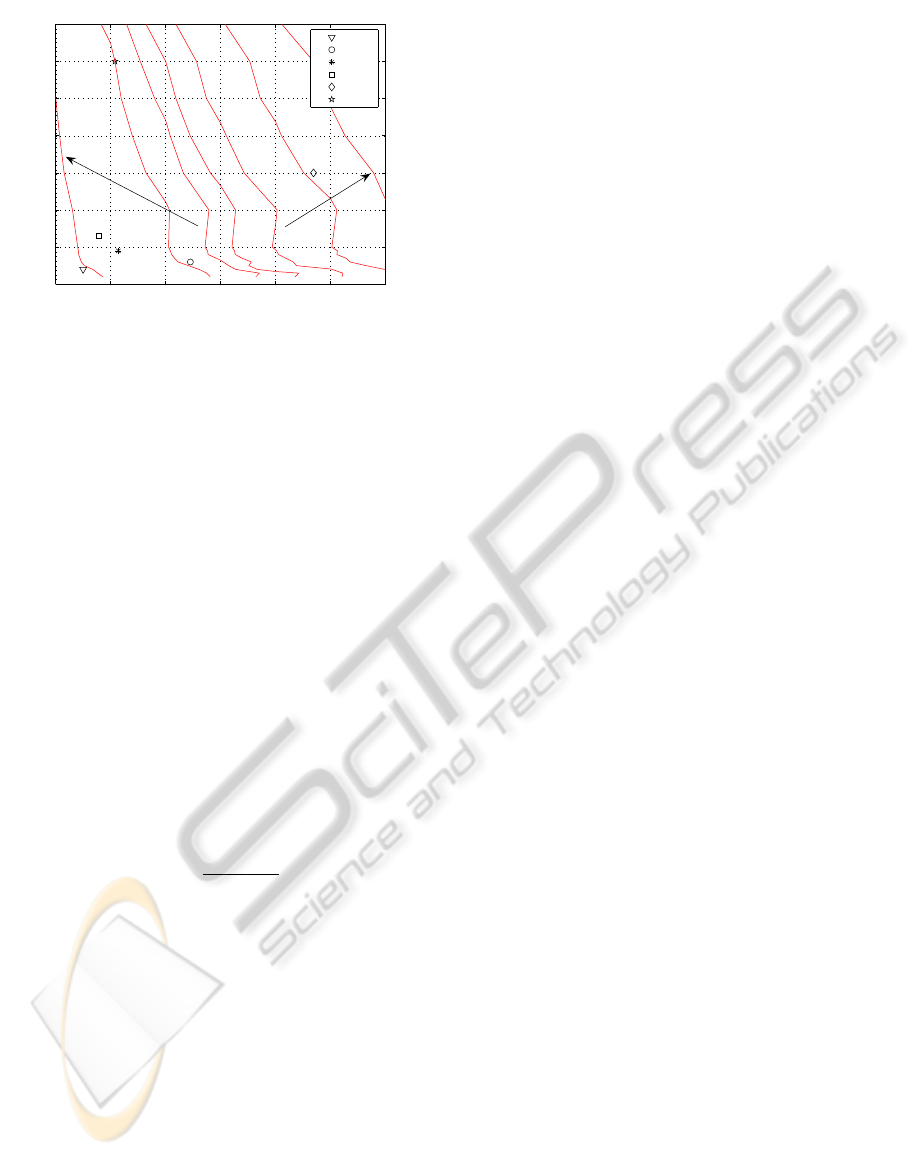
Figure 3: Efficiency area of the tessellation procedure based
on polytope search. The covered area is more extensive that
the covered by qhull and includes the datasets. However, for
low dimensional problems qhull significatively outperforms
it.
It should be mentioned that the plotted points of
each of the ML Repository dataset in the Figure 3
are only qualitative because the plotted background
data are related to random datasets. No qvoronoi val-
ues are available for glass dataset and larger, because
these tests had not finished after several hours of com-
putation. Therefore, they are not comparable for prac-
tical purposes. These data are computed on an In-
tel Xeon, 3.06 Ghz, 512K in L2 cache and 1.5GB of
RAM. The last column contains the T
2
computed for
the Algorithm 2, only slight differences are detected
between the two Algorithms.
The cost analysis of proposed procedure depends
on the analysis cost of the LP problem for finding a
Polytope enclosing a point. The cost to obtain all the
Voronoi adjacencies C
AllAd
(n,m) is:
C
AllAd
(n,m) = γ(n,m)
m(m− 1)
2
C
Poly
(n,m) (11)
Where γ(n,m) is the fraction of the m(m − 1)/2
pairs that that are tested. It runs, in the considered
cases of the dataset in UCI, from 0.837 for iris dataset
to 0.112 for wdbc dataset. In general it would have
a general dependence on m and n that future works
could clarify. We think that it depend for every spe-
cific dataset, and that a general dependence as γ(n,m)
is only valid as an average for random datasets.
The cost to obtain a polytope, C
Poly
(n,m), is the
cost to solve a LP problem. Although we have used
in practice the Simplex Dual Algorithm for practi-
cal proposes, any of the available LP Algorithms can
be used. This algorithm choice is no central of our
proposal; such as future works will test the rela-
tive efficiency of other choices (Simplex based vari-
ants as well as interior methods). A founded opin-
ion (Dantzig and Thapa, 2003) is that the efficiency of
good implementations of simplex-based methods and
interior point methods are similar for practical appli-
cations of linear programming. However, for specific
types of LP problems, it may be that one type of algo-
rithm is better than another, but it cannot be decided
without an exhaustive test.
Is very difficult to define the theoretical cost of
a LP Algorithm because we have to decide between
the cost for worst-case and the cost for average-case
in the defined application. Although the worst-case
complexity of the Simplex Algorithm is exponential
in the problem dimension, it was widely known that
in practice it is probably a polynomial-time (Wright,
2004), that is in practice the Simplex method almost
always convergeson real-world problems in a number
of iterations that is polynomial in the problem dimen-
sion.
If the average cost of LP problem for poly-
tope finding is on the class of O( f(m)g(n), where
f(m) and g(n) are polynomial, so we can conclude
that the practical cost C
AllAd j
(n,m) falls in the class
O(m
2
f(m)g(n)) also polinomial. That is very advan-
tageous to qhull based approaches (which are in ex-
ponential O(m
n/2
) class) for large values of the space
dimensionality n, but unadvantageous for small ones.
4 CONCLUSIONS
Machine Learning applications impose unattainable
goals on traditional tessellation techniques, while lin-
ear programming provides alternative approaches to
perform the tessellation of high dimensional datasets.
Linear programming provides a sound theoretical
background for the tessellation problem as well as an
inspirational source for efficient implementations. A
modification of the Voronoi adjacency test had shown
that it is basically the polytope search procedure, en-
abling the implementation of a more efficient algo-
rithm for high dimensional datasets. It is more ef-
ficient that a single adjacency test because in each
trial it provides a polytope, that is many adjacency
values. These perform best if focusing on theγ pa-
rameter, which is related to the fraction of all the all-
to-all needed test. The reason for this is that, the
higher dimensionality the greater the number of in-
stances included in each polytope. This is the coun-
terpart of the curse of the dimensionality. Perhaps this
would be the reason why it permits a relative good
performance at high dimensionality. The qhull-based
and the linear programming-based implementations
are complementary because each is good in differ-
ent domains. A suitable use of both algorithms can
EFFICIENT COMPUTATION OF VORONOI NEIGHBORS BASED ON POLYTOPE SEARCH IN PATTERN
RECOGNITION
363

efficiently tessellate many massive datasets in Ma-
chine Learning. The use of a pre-test based on the
Gabriel adjacency, which provides a faster but incom-
plete graph of neighboring relations, does not signi-
ficatively increase performance because, while it is
fast, it provides only one link value while the poly-
tope provides several link values in each test.
REFERENCES
Agrell, E. (1993). A method for examining vector quan-
tizer structures. In Proceeding of IEEE International
Symposium on Information Theory, page 394.
Asuncion, A. and Newman, D. (2007). UCI machine learn-
ing repository.
Aupetit, M. (2003). High-dimensional labeled data analy-
sis with gabriel graphs. In European Symposium on
Artificial Neuron Networks, pages 21–26.
Aupetit, M. and Catz, T. (2005). High-dimensional labeled
data analysis with topology representating graphs.
Neurocomputing, 63:139–169.
Avis, D. and Fukuda, K. (1992). A pivoting algorithm for
convex hulls and vertex enumeration of arrangements
and polyhedra. Discrete Comput. Geom., 8(3):295–
313.
Barber, C. B., Dobkin, D. P., and Huhdanpaa, H. (1996).
The quickhull algorithm for convex hulls. ACM Trans-
actions on Mathematical Software, 22(4):469–483.
Bazaraa, M. S., Jarvis, J. J., and Sherali, H. S. (1990). Lin-
near Programming and Networks Flows. Wiley.
Bhattacharya, B., Poulsen, R., and Toussaint, G. (1992).
Application of proximity graphs to editing nearest
neighbor decision rules. Technical Report SOCS
92.19, School of Computer Science, McGill Univer-
sity.
Bowyer, A. (1981). Computing Dirichlet tessellations. The
Computer Journal, 24(2):162–166.
Bremner, D., Fukuda, K., and Marzetta, A. (1997). Primal-
dual methods for vertex and facet enumeration. In
SCG ’97: Proceedings of the thirteenth annual sympo-
sium on Computational geometry, pages 49–56, New
York, NY, USA. ACM.
Chin, E., Garcia, E. K., and Gupta, M. R. (2007). Color
management of printers by regression over enclosing
neighborhoods. In IEEE International Conference on
Image Processing. ICIP 2007, volume 2, pages 161–
164.
Dantzig, G. B. and Thapa, M. N. (2003). Linear Program-
ming 2: Theory and Extensions. Springer Verlag.
Devroye, L., Gyorfi, L., and Lugosi, G. (1996). A Proba-
bilistic Theory of Pattern Recognition.
Duda, R., Hart, P., and Stork, D. (2001). Pattern Classifica-
tion. John Wiley.
Fukuda, K. (2004). Frecuently asked questions in polyhe-
dral computation. Technical report, Swiss Federal In-
stitute of Technology, Lausanne, Switzerland.
Fukuda, K., Liebling, T. M., and Margot, F. (1997). Analy-
sis of backtrak algoritms for listing all vertices and all
faces of convex polyhedron. Computational Geome-
try, 8:1–12.
Gabriel, K. R. and Sokal, R. R. (1969). A new stattistical
approach to geographic variation analysis. Systematic
Zoology, 18:259–270.
Greeff, G. (2005). The revised simplex algorithm on a GPU.
Technical report, Dept. of Computer Science, Univer-
sity of Stellenbosch.
Gupta, M. R., Garcia, E. K., and Chin, E. (2008). Adaptive
local linear regression with application to printer color
management. IEEE Trans. on Image Processing.
Kalai, G. (1997). Linear programming, the simplex algo-
rithm and simple polytopes. Math. Program., 79:217–
233.
Koivistoinen, H., Ruuska, M., and Elomaa, T. (2006). A
voronoi diagram approach to autonomous clustering.
Lecture Notes in Computer Science, (4265):149–160.
Navarro, G. (2002). Searching in metric spaces by spatial
approximation. The VLDB Journal, 11:28–46.
Ramasubramanian, V. and Paliwal, K. (1997). Voronoi
projection-based fast nearest-neighbor search algo-
rithms: Box-search and mapping table-based search
techniques. Digital Signal Processing, 7:260–277.
Sibson, R. (1981). Interpreting multivariate data, chapter
A brief description of natural neighbour interpolation,
pages 21–36. John Wiley.
Watson, D. F. (1981). Computing the n-dimensional tes-
sellation with application to voronoi polytopes. The
Computer Journal, 24(2):167–172.
Web, A. (2002). Statistical Pattern Recognition. John Wi-
ley, 2nd edition.
Winston, W. L. (1994). Operations Research Applications
and Algorithms. Wadsworth.
Wright, M. H. (2004). The interior-point revolution in op-
timization: History, recent developments,nnd lasting
consequences. Bull. of AMS, 42(1):39–56.
Yarmish, G. and van Slyke, R. (2001). retroLP, an imple-
mentation of the standard Simplex method. Technical
report, Dept. of Computer and Information Science,
Brooklyn College.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
364
