
INTELLIGENT CHAIR SENSOR-ACTUATOR
A Novel Sensor Type for Seated Posture Detection and Correction
Rui Lucena
1
, Cláudia Quaresma
2,3
, Adelaide Jesus
1
and Pedro Vieira
1
1
Departamento de Física, Faculdade de Ciências e Tecnologia, Universidade Nova de Lisboa, Caparica, Portugal
2
CEFITEC, Departamento de Física, Faculdade de Ciências e Tecnologia, Universidade Nova de Lisboa
Quinta da Torre P-2829-516, Caparica, Portugal
3
Departamento de Saúde, Instituto Politécnico de Beja, P-7800-111, Beja, Portugal
Keywords: Sensing chair, Pressure-distribution sensors, Haptic feedback, Posture guidance, Sitting position.
Abstract: In order to build an intelligent chair capable of posture guidance and correction we propose a new
sensor/actuator pressure cell capable of measuring applied pressure and conformation change, which will
allow posture evaluation, guidance and correction. We developed and applied the pressure cells to the seat
pad of an office chair to test if both the cells and their placement were suitable for pressure map
reconstruction. When tested for 10 different postures, the results showed distinguishable pressure maps for
each posture, making the pressure cells suitable for pressure map reconstruction and posture evaluation.
This paper also presents a briefly description of our vision and goals for the intelligent chair project.
1 INTRODUCTION
The evolution of the society significantly reduced
the demands for physical activity. Changes in
transportation, communications, workplace and
entertainment introduced into our population
sedentary behaviours. While some of these
behaviours can be avoided, some activities force us
to spend long periods of time in a sitting position.
The consequences of slouching and poor posture are
well documented and can lead to a number of
detrimental health issues like anatomical
characteristics changes of the spine, problems with
intervertebral discs and joints, back and neck pain,
headaches, fatigue and others (John Schubbe, 2004).
The long term goal of this project is to build an
intelligent chair that effectively corrects and
prevents bad posture adoption in order to minimize
the health issues previously described.
Our main hypothesis is that by increasing
discomfort when a poor posture is adopted, the user
will be encouraged to change his position. The
conformation changes in the chair will be made
through the use of pressure cells that we developed,
which are also responsible for evaluating the posture
through their integrated pressure sensor.
The second hypothesis is that slight changes in
the chair conformation over long periods of time,
may help to evenly distribute the applied pressure on
contact zones, reducing fatigue and discomfort. This
could help preventing the adoption of incorrect
postures over long periods of time due to the need of
pressure relief on compressed tissues.
In this paper, we introduce the pressure cell
concept and its results in differentiating 10 different
postures using only a seat pad with 4 pressure cells.
We also present a global vision of our approach to
an intelligent chair for postural guidance and
correction.
2 RELATED WORK
Over the years, several research groups have studied
postural sensing and classification systems and
applied them in several different areas, such as
irregular behavior detection, emotional evaluation
and biometric authentication. Others have used
haptic feedback responses to control human-
computer interactions. However, few have applied
them to posture guidance and correction and no
studies were found in pressure relief patterns in
seated position. In this section we describe the most
relevant papers on posture detection and correction
in seated position.
333
Lucena R., Quaresma C., Jesus A. and Vieira P..
INTELLIGENT CHAIR SENSOR-ACTUATOR - A Novel Sensor Type for Seated Posture Detection and Correction.
DOI: 10.5220/0003772003330336
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2012), pages 333-336
ISBN: 978-989-8425-91-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Tan et al (2001) described the use of a chair as a
haptic interface for human-computer interactions.
This work used two Tekscan® sensor sheets, with
42-by-48 sensing units to monitor the pressure
distribution in both the seat pad and the backrest.
The use of pattern recognition technics to develop a
static posture classification algorithm, such as
Principal Component Analyses (PCA), achieved an
overall classification accuracy of 96% and 79% for
familiar and unfamiliar users, respectively.
Other researchers used the same sensing system
configuration to test other classification algorithms.
Mota and Picard (2003) used Neural Networks to
classify 9 static postures in real time, achieving an
overall accuracy of 87.6%. In addition, Hidden
Markov Models were used to associate seated
postures with affective states. The algorithm
achieved an overall performance of 82.3% with
postures sequences coming from known subjects and
76.5% from unknown subjects. Zhu et al. (2003)
tested several classification algorithms to find which
one suits best static posture classification. Between
k-Nearest Neighbor, PCA, Linear Discriminant
Analysis and Sliced Inverse Regression (SIR), the
authors found PCA and SIR comparable in
performance and both outperformed the other
methods tested.
As suggested by Tan et al (1997, pp.57) “a low-
cost and low-resolution pressure sensing system will
then be developed to facilitate the widespread use of
smart chairs”. Mutlu et al (2007) adopted a near
optimal sensor placement approach to drastically
reduce the number of pressure sensors used. The
algorithm down-sampled the sensor data from the
high resolution sensor sheets used in previous
researches (Tan et al 2001; Mota and Picard 2003;
Zhu et al 2003) and determined the near optimal
placement of 19 one-and-a-half-inch-square FSR
(Force Sensitive Resistors) sensors. The system
achieved 78% accuracy with 19 sensors, and 87%
using data from 31 sensors.
More recently, Zheng and Morrell (2010)
developed a system with only 7 FSR and 6
vibrotactile actuators, specifically designed to
posture guidance through haptic feedback. With a
classification algorithm based on the mean squared
error between the pressure measurements and the
reference pressure for each static posture, an overall
accuracy of 86.4% was achieved when
distinguishing among 10 postures. This study has
also successfully shown the effectiveness of haptic
feedback for coaching motor behavior in the form of
seated posture.
3 CHAIR DEVELOPMENT
3.1 Pressure Cells
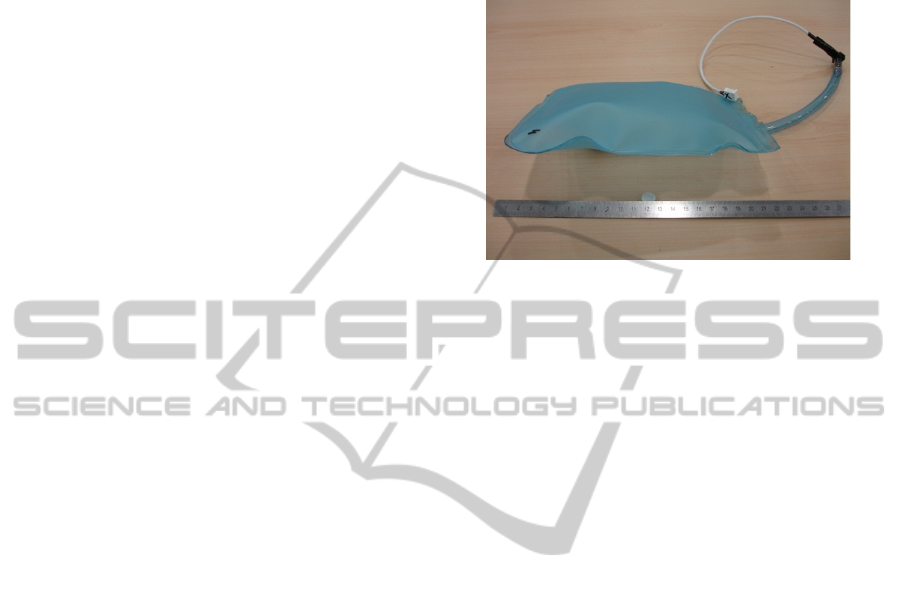
Figure 1: An inflated pressure cell with a gauge pressure
sensor attached.
The objectives of this project required an interface
that could measure the applied pressure and also
change the chair´s conformation. Taking in
consideration a low cost and commercial available
solution, we developed the pressure cells. This
pressure cells can sense pressure and serve as
actuators, by inflation and deflation, for posture
guidance and correction.
As seen in figure 1, a pressure cell is composed
of a large sealed thermoplastic polyurethane pocket
with 20x19cm of dimensions with a rubber pipe
attached. On the other end of the rubber pipe there is
a piezoelectric gauge pressure sensor to measure the
internal pressure of the cell. All cells have an equal
residual air volume for a baseline pressure
measurement. The gauge pressure sensors used were
the Honeywell 24PC series rated to 15PSI. In order
to compensate the inherent linear differences and
offsets between the sensors, calibration curves were
taken and corrected in software data processing, so
the sensors better match themselves.
3.2 Cells Placement
The use of a low resolution sensor matrix requires a
strategically sensor placement in order to achieve
good performance results. Two main strategies were
identified on previous literature. A pure
mathematical and statistical approach (Mutlu et al.,
2007) and an anatomical approach (Zheng and
Morrell, 2010) which considered the ischial
tuberosities, the thigh region behind the knee, the
lumbar region of the spine and the shoulder blades
as the most important and distinguishable areas of
the body for detecting postures.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
334

Figure 2: Seat pad stripped of padding foam, showing the
individual pressure cells placement. 1. Back Left (BL), 2.
Back right (BR), 3. Front left (FL), 4. Front right (FR).
We concur with the anatomical approach since
those are the areas where most pressure is applied in
the seated position. It is also the approach that uses
the least number of sensors, which is helpful in
reducing the overall cost of the chair. Therefore, the
seat pad was divided into 2-by-2 similar areas, one
area to each ischial tuberosities, and one area to each
thigh region behind the knee. The cells were placed
beneath the chair’s padding foam to maintain the
anatomical cut of the seat pad. The seat pad division
is illustrated in figure 2.
To ensure that the interesting areas are always on
top of the respective pressure cell, we developed
large cells that cover almost the entire seat pad. This
also brings an extra advantage of minimizing the
gaps between cells, which could prove
uncomfortable for the users.
The backrest is planned to follow the same
criteria as the seat pad.
4 EVALUATION AND RESULTS
To evaluate our pressure cells performance and their
placement [Back Left (BL); Back right (BR), Front
left (FL), Front right (FR)] on the seat pad we resort
to a posture list used in previous related papers (Tan
et al. 2001; Mutlu et al. 2007; Ying and Morrell.
2010). Those positions are:
1. Upright;
2. Slouching;
3. Leaning forward;
4. Leaning back;
5. Leaning left;
6. Leaning right;
7. Left leg crossed over right;
8. Right leg crossed over left;
9. Left leg crossed over right and leaning right;
10. Right leg crossed over left and leaning left.
The user started in position 1. and successively
changed to the next position with an interval of
approximately 5 seconds. The data was acquired in
real time with a sampling rate of 20Hz and the
results are displayed in Figure 3.
The best scenario to characterize a posture is to
have a unique pressure distribution to each posture.
Our system was able to produce a different pressure
distribution for each of the 10 postures evaluated,
using only 4 sensible areas in the seat pad, thus
allowing an easy characterization of each posture.
Also, we noticed that every time the user
changed is position the output of the pressure cells
was divided into two zones: a “transient zone” and a
“stable zone”, showed in figure 4.
On changing posture from leaning right to left
leg crossed over right, the pressure on the back left
cell (BL) rapidly increased as expected. Also, the
user spent 2 to 3 seconds in the “transient zone”
before reaching the “stable zone”. This could be
relevant to a real time monitoring system so that
classification algorithms won’t get confused in the
“transient zone”, or even to develop algorithms that
based on the “transient zone” are able to predict
what will the user’s posture be.
5 CONCLUSIONS AND FUTURE
WORK
As a first step for our intelligente chair approach our
pressure cells were able to produce distinguishable
pressure maps for each of the 10 posture tested. We
therefore conclude that the pressure cells conjugated
with the cell placement of this study are suitable for
our intelligent chair project as a pressure mapping
system.
The next step is to control the air pressure and
volume inside the pressure cells, allowing for
changes in the chair conformation and stiffness.
In other applications, hydrogel pads have been
widely used to reduce discomfort in compressed
areas. In a later stage of this project, we plan to use
hydrogel, instead of air, to fill the pressure cells in
an attempt to further increase the chair´s overall
comfort.
Upon conclusion of the chair fabrication,
algorithms will be developed for posture evaluation
and correction. A temporal analysis of a person
sitting behaviour will be needed, in order to study an
2
3 4
1
INTELLIGENT CHAIR SENSOR-ACTUATOR - A Novel Sensor Type for Seated Posture Detection and Correction
335
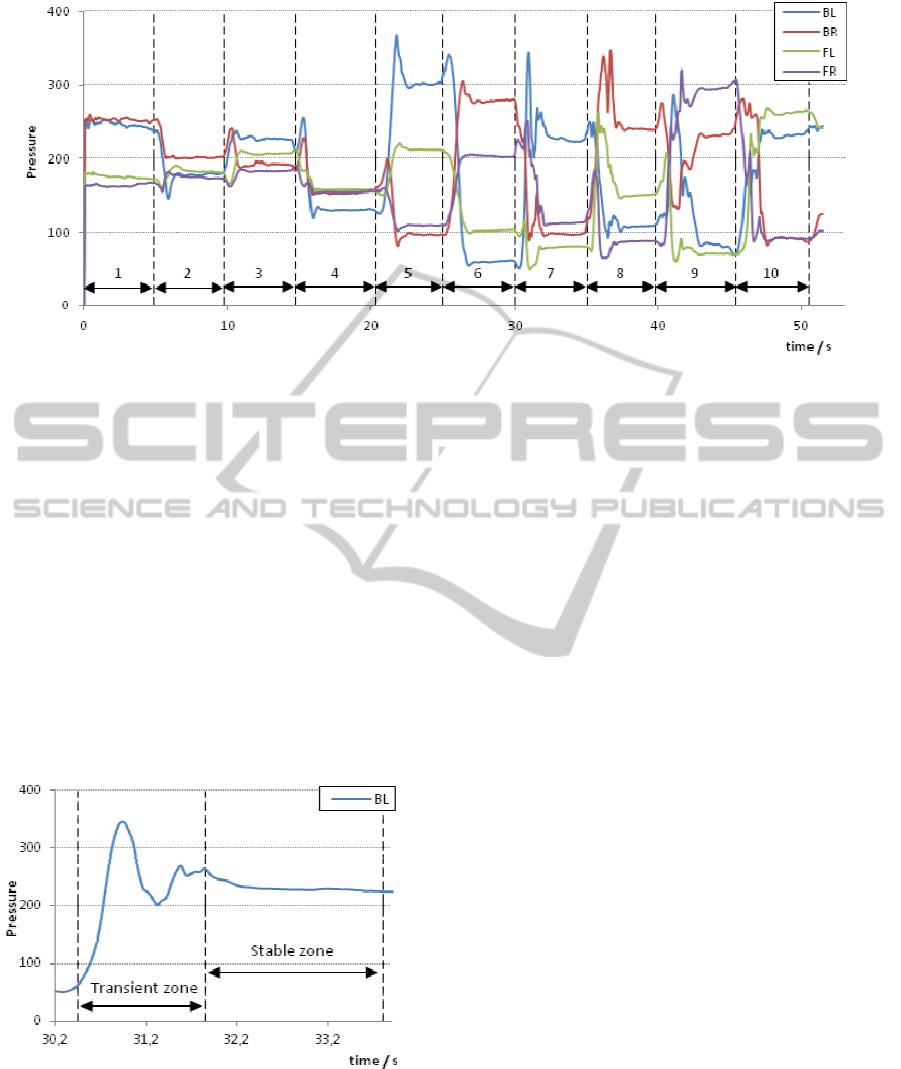
Figure 3: Real time pressure measurements from each cell for the 10 reference postures previously described.
effective pressure relief pattern. At this point,
clinical studies should be made in order to evaluate
the correction models applied and the benefits to the
target population.
ACKNOWLEDGEMENTS
The authors wish to thank Eng. Pedro Duque of
NGNS-is company for consultation on electronics
development and for helping with the pressure cell
fabrication and implementation on the chair.
This project is supported by FEDER at the light
of QREN – Quadro de Referência Estratégico
Nacional, Portugal 2007/2013.
Figure 4: Pressure cell measurement from the back left
cell during posture change from position 6. to position 7.
REFERENCES
John Schubbe, 2004. Good Posture Helps Reduce Back
Pain. [WWW] spine-health. Available from:
<http://www.spine-
health.com/wellness/ergonomics/good-posture-helps-
reduce-back-pain> [Accessed 24 June 2011].
Tan, H. Z., Lu, I., Pentland, A., 1997. The Chair as a
Novel Haptic User Interface. In: PUI’97, Proceedings
of the Workshop on Perceptual User Interfaces. Banff,
Alberta, Canada, 19-21 October 1997.
Tan, H. Z., Slivovsky, L. A., Pentland, A., 2001. A
Sensing Chair Using Pressure Distribution Sensors.
IEEE /ASME Transactions on Mechatronics, 6(3), pp.
261 – 268.
Mota, S., Picard, R. W., 2003. Automated Posture
Analysis for Detecting Learner's Interest Level. In:
CVPRW '03, Conference on, Computer Vision and
Pattern Recognition Workshop. Madison, Wisconsin,
USA, 16-22 June 2003, IEEE
Zhu, M., Martinez, A. M., Tan, H. Z., 2003. Template-
based Recognition of Static Sitting Postures. In:
CVPRW '03, Conference on, Computer Vision and
Pattern Recognition Workshop. Madison, Wisconsin,
USA, 16-22 June 2003, IEEE
Mutlu, B. et al., 2007. Robust, Low-cost, Non-intrusive
Sensing and Recognition of Seated Postures. In: UIST
'07, Proceedings of the 20th annual ACM symposium
on User interface software and technology. Newport,
RI, USA, 07-10 October 2007, New York: ACM.
Zheng, Y. J., Morrell, J. B., 2010. A vibrotactile feedback
approach to posture guidance. In: IEEE, Haptics
Symposium, 2010. Waltham, MA, USA, 25-26 March
2010, IEEE.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
336
