
MINIATURIZED WIRELESS CONTROLLED
ELECTROSTIMULATOR
Tiago Ara
´
ujo
1,2
, Neuza Nunes
2
and Hugo Gamboa
1
1
Faculdade de Ci
ˆ
encias e Tecnologia, Universidade Nova de Lisboa, Lisbon, Portugal
2
PLUX - Wireless Biosignals, Lisbon, Portugal
Keywords:
Electrostimulation, Wireless, Portability, Hardware development, Closed loop.
Abstract:
This project introduces a new approach to hardware and software controlled solutions in the electrical stimula-
tion field. A miniaturized, portable and wireless electrostimulator was designed and its development steps and
also a new perspective to control the stimulation parameters in real time are exposed in this paper. Our system
allows the control and automation of the stimulation session with high flexibility and easiness, using a user-
friendly interface for a computer or an Android platform, which communicates with the portable and wireless
device. The hardware performance was tested with a skin electric model, achieving the expected results. The
presented solutions have high applicability in the scientific and ambulatory electrostimulation context.
1 INTRODUCTION
The electrical stimulation is a technique widely used
in research with contributions of high applicability in
the clinical environment and the sports field. Com-
bined with surface electromyography, this technique
enables a better understanding of neuromuscular re-
cruitment, exploring opportunities for study and de-
velopment of protocols for performance evaluation
and physical rehabilitation (Lake, 1992).
The electrical stimulation (ES) is a nervous acti-
vation generated by the application of low frequency
electric current, which will produce a recruitment ef-
fect in the stimulated muscle group. The electri-
cal stimulation can be applied directly on the mus-
cle’s surface, designed by electrical muscle stimula-
tion (EMS), or in the nerve structure, designed by
functional electrical stimulation (FES) (Bajd et al.,
1999; Thrasher and Popovic, 1999).
The stimulation of a particular muscle group is
controlled by frequency, amplitude and pulse width
of the electrical current applied (Robertson et al.,
2006; Cheng et al., 2004). Currently, the electros-
timulator systems can be classified into two types:
the open-loop system and closed-loop system. The
first is characterized only by the stimulus control ap-
plied through the electrostimulator. The latter stands
out not only for controlling the intensity, frequency
and pulse width but also by the outcome evaluation
of muscle response to stimulation. This assessment
is made by processing the signal from sensors such
as accelerometers, goniometers, gyroscopes and elec-
tromyography sensors (Zhang et al., 2007). The sig-
nals obtained with these sensors will enable the anal-
ysis and assessment of the muscle’s recruitment re-
sponse and, at the same time, provide feedback for
the stimuli generation, adjusting the stimulus to its
response. Despite the characteristics reported above,
current systems that integrate electrostimulation usu-
ally have limitations in terms of usability and portabil-
ity or in terms of control flexibility and synchroniza-
tion. This paper exposes a solution to overcome these
limitations by developing a miniaturized and portable
electrostimulation device, capable of controlling the
stimulation parameters with high flexibility and en-
abling synchronization with external devices.
In the following section the development of the
electrostimulation system’s hardware and control in-
terface is described and we also depict the specifica-
tions and characteristics of this system. Section 3 will
report and discuss the performance results of the sys-
tem in a skin electric model. Section 4 concludes the
work by stating its main contributions and exposing
the advantages of the developed system.
337
Araújo T., Nunes N. and Gamboa H..
MINIATURIZED WIRELESS CONTROLLED ELECTROSTIMULATOR.
DOI: 10.5220/0003772103370340
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2012), pages 337-340
ISBN: 978-989-8425-91-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
2 SYSTEM DEVELOPMENT
2.1 System Control
The hardware was designed and developed to allow
greater flexibility in the stimulation control param-
eters. This implementation delegates the real-time
control in an external application where it’s possible
to manipulate the entire stimulation protocol. The
hardware architecture accepts the input commands
from a computer or an Android Smartphone via blue-
tooth, raising new possibilities of portability and pro-
cessing performance in the electrostimulation field.
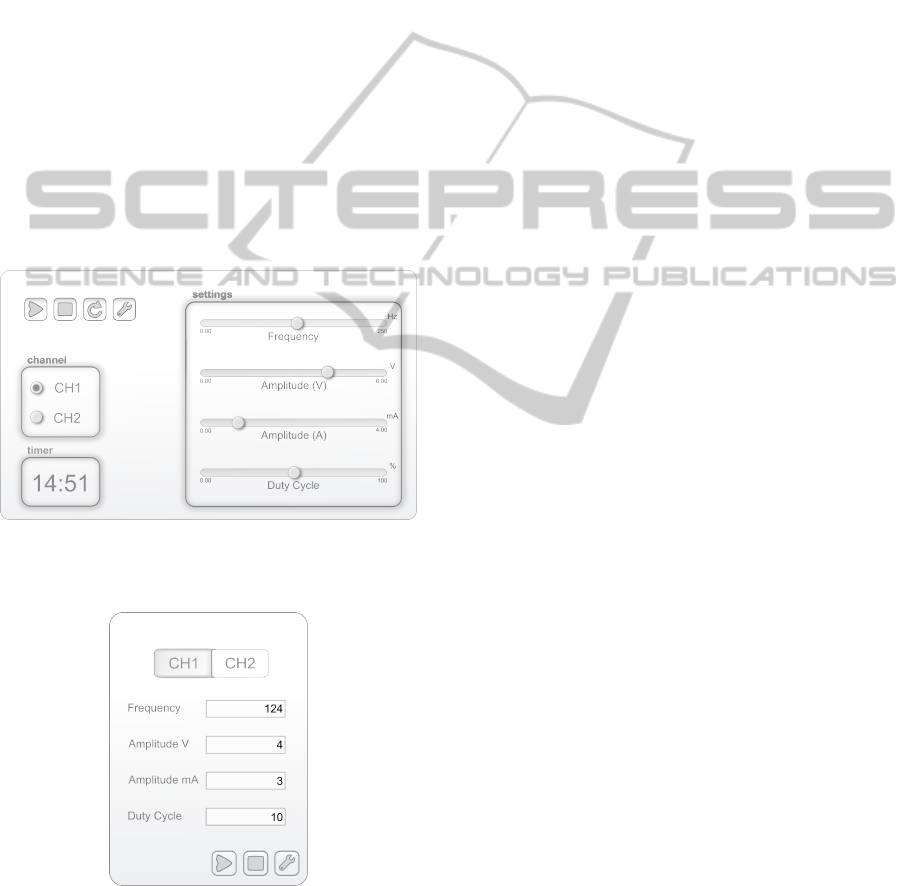
Currently, both designed interfaces allow the user to
choose the frequency, duty cycle, amplitude in volt-
age and in current of the stimuli, as shown in figures
1 and 2. It’s also possible to choose the channel and
time of stimulation. In the customizable configura-
tions of the application the user can choose a pulsed
stimuli session.
Figure 1: Computer interface scheme for stimulation ses-
sion control.
Figure 2: Android interface scheme for stimulation session
control.
2.2 Hardware
In addition to the high control flexibility, the elec-
trostimulator is developed in a real-time wireless
data communication, low power consumption and
high electromagnetic interference immunity guide-
line. The system hardware is internally divided into
three modules, a digital, an analogue and a power
module (as shown in Figure 3):
i) The digital module integrates the bluetooth commu-
nication module and the microcontroller. This mod-
ule establishes communication with the control soft-
ware, generates and controls the parameters of electri-
cal stimulation - as the total time of stimulation, fre-
quency, duty cycle and amplitude;
ii) In the analogue module the stimulation signal
is processed and amplified to guarantee the desired
power voltage and current;
iii) The power module supplies the analogue and dig-
ital modules. This module also controls the battery
level and charging cycle. Whenever it is connected to
supply voltage produces the decoupling between the
supply and the stimulation circuit, protecting the user.
2.3 Specifications and Characteristics
The device presented is a miniaturized and portable
system with 6.5 x 10.5 x 1.9 cm dimensions. It has
two independent channels for stimuli output and in
order to be able to work as a closed-loop system, it
also has a synchronization port that allows real time
communication with a signal acquisition system, such
as the bioPLUX system (PLUX, 2011), which enables
the measurement of the muscle response to the stim-
ulus induced. Figure 4 presents a scheme of the sys-
tems communication.
The current version of this electrostimulator en-
ables the generation of 0-250Hz frequencies with
a resolution of 16 bits. The amplification module
ranges from 0-6V in voltage and 0-4mA in current.
The hardware performs the automatic adjustment of
the voltage value if it is in constant current mode, or
current if it is in constant voltage mode. The rang-
ing values that the system allows are still too low for
the application of surface electrical stimulation in hu-
mans but have high applicability in invasive applica-
tions with, for example, experimental rats where the
supra-maximal tension of their nerve is 3mA. The
next development step is the adaptation of the exist-
ing amplification module for human non-invasive ap-
plication.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
338

Figure 3: Hardware schematics.
Figure 4: Illustration of the system communication and
control flexibility. Example with invasive and non-invasive
electrostimulator.
3 SYSTEM PERFORMANCE
To evaluate the current and voltage automatic regu-
lation, we tested the circuit with a skin impedance
model (Figure 5). In this model, the resistor R1 mod-
els the constant resistance components of the skin and
deep tissue resistance. The R2 resistor, with C1 ca-
pacitor in parallel, represents the nonlinear dynamics
of the skin impedance (Dorgan and Lake, 1999). The
advantage of a voltage and current regulation is that
we surpass the variations of the tissues galvanic resis-
Figure 5: Skin impedance model. From (Dorgan and Lake,
1999).
Table 1: Current variation vs load variation in constant cur-
rent mode.
Resistance (kΩ) Current (mA) Tension (V)
1.72 3.00 5.20
1.29 3.00 3.90
0.99 3.00 2.90
0.72 3.00 2.20
0.25 3.00 0.80
tance which are being stimulated, ensuring the same
current or tension.
To test the constant current mode we programmed
a unipolar square wave stimulation pulse with 3mA
and variate the model resistor, monitoring the tension
and current variations. In table 1 we report the results
obtained in the constant current mode.
The same approach was used to test the constant
voltage mode. A unipolar square wave stimulation
pulse with 3V of amplitude was programmed and
we varied the model resistor while the peak-to-peak
voltage and current values were acquired. In table 2
MINIATURIZED WIRELESS CONTROLLED ELECTROSTIMULATOR
339
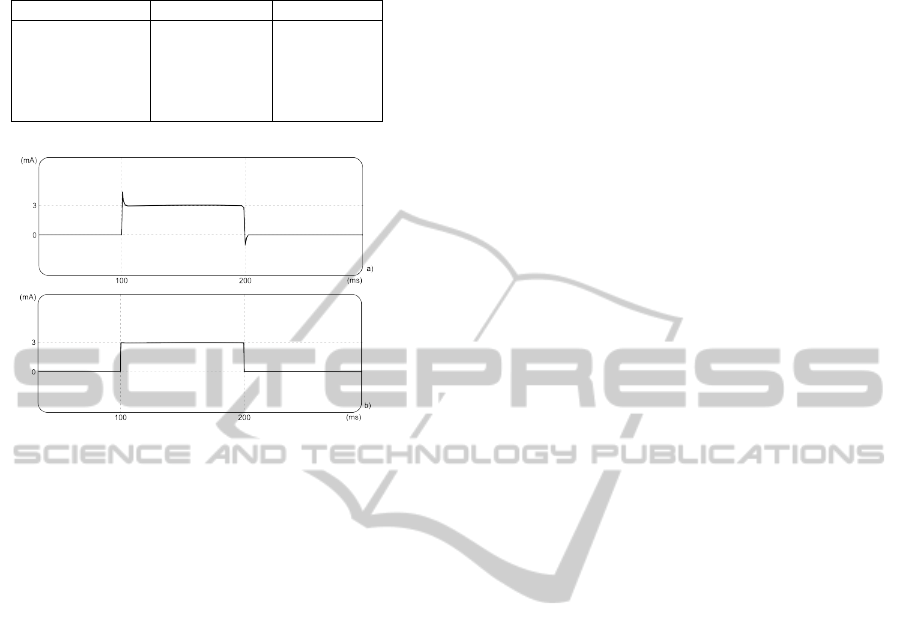
Table 2: Voltage variation vs load variation in constant volt-
age mode.
Resistance (kΩ) Current (mA) Tension (V)
1.80 1.67 3.01
1.50 2.00 2.97
1.31 2.30 3.05
1.19 2.53 3.01
0.82 3.64 2.93
Figure 6: Effect of the skin nonlinear dynamics represented
by the C1 capacitor: a) With C1=1µF; b) Without C1.
we report the results obtained in the constant voltage
mode.
As it was expected, in constant current mode the
voltage varies to equalize the variation in the resis-
tance, keeping the applied current constant.
The same effect, but now applied in the current is
verified in the constant voltage mode were the current
compensate the resistance variations keeping the ap-
plied voltage in the desired value. In constant voltage
mode, the system can’t keep the voltage regulation for
load values bellow 750Ω, because the system is cur-
rently limited to 4mA.
The implementation of this model enabled the
evaluation of the effect of the skin impedance non-
linear dynamics. For values of C1 higher than 1 µF
we observed an overshooting effect which can exceed
about 20% the programmed current value. This effect
is exposed in Figure 6, which shows the signal of cur-
rent corresponding to a square wave of 2Hz and 3mA
of amplitude with and without the C1 effect.
With this study we evaluated the constant current
and constant voltage mode and guaranteed the correct
operation of the developed device.
4 CONCLUSIONS
The main contributions of this work are related with
the high flexibility in the control of the stimulation
session in association with the portability and low di-
mensions of the device.
With this device is possible to automate a stimu-
lation session and change it in real time, allowing, for
example, an external evaluator to analyse the differ-
ences in gait according to the protocol that is applied.
The high portability of this system and its user-
friendly characteristics may allow its usage in a pa-
tient home through ambient assisted living with a real-
time protocol controlled in a web based environment
by the physician.
5 FUTURE WORK
As a continuation of this work, we are now testing the
device in experimental animals, with good results to
the date.
We are also implementing a stimuli wave form
control, which will enable the study of the effect of
different wave forms for stimuli application in the
muscular structures.
Another advance to this work resides with the
adaptation of the hardware’s amplification module for
surface electrostimulation application.
REFERENCES
Bajd, T., Kralj, A., Stefancic, M., and Lavrac, N. (1999).
Use of functional electrical stimulation in the lower
extremities of incomplete spinal cord injured patients.
In Artif Organs, 23(5):403-9.
Cheng, K., Lu, Y., Tong, K., Rad, A., Chow, D., and Su-
tanto, D. (2004). Development of a circuit for func-
tional electrical stimulation. In IEEE Transactions
on Neural Systems and Rehabilitation Engineering,
vol.12, no.1.
Dorgan, S. and Lake, R. (1999). A model for human skin
impedance during surface functional neuromuscular
stimulation. In IEEE Transactions on Rehabilitation
Engineering, vol. 7, no. 3.
Lake, D. (1992). Neuromuscular electrical stimulation. an
overview and its application in the treatment of sports
injuries. In Sports Med 13 320-36.
PLUX (2011). PLUX - Wireless Biosignals S.A.
www.plux.info.
Robertson, V., Ward, A., Low, J., and Reed, A. (2006).
Electrotherapy Explained: Principles and Practice.
Elsevier Health Sciences, 4th edition.
Thrasher, T. and Popovic, M. (1999). Funcional electrical
stimulation of walking: Function, exercise and reha-
bilitation. In Ann Readapt Med Phys. 51(6):452-60.
Zhang, D., Guan, T., Widjaja, F., and Ang, W. (2007). Func-
tional electrical stimulation in rehabilitation engineer-
ing: A survey. In Proceedings of the 1st international
convention on Rehabilitation engineering and assis-
tive technology.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
340
