
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS
IN STEREOSCOPY
Youval Nehmadi
1
, Orly Kalantyrsky
2
and Hugo Guterman
3
1
Department of Electrical and Computer Engineering, Ben-Gurion University of the Negev, Beer-Sheva, Israel
2
Department of Computer Science, Tel Aviv-Yaffo Academic College, Tel Aviv, Israel
3
Department of Electrical and Computer Engineering, Ben-Gurion University of the Negev, Beer-Sheva, Israel
Keywords: Image Processing, Image Registration, Stereo Vision.
Abstract: One of the challenges of stereovision is to process images with repetitive objects. In order to calculate the
distance to an object, matching of the corresponding points between two images must be done. When
repetitive objects exist, matching is not straightforward. Many known stereo methods rely on a uniqueness
constraint. A uniqueness constraint assumes that only one correct match exists between stereo images. Some
algorithms ignore repetitive objects and omit them in the depth map. We present a method that does not
employ a uniqueness constraint, but rather determines whether an object is repetitive and then solves the
matching problem by finding a unique object that is in close proximity to the object.
1 INTRODUCTION
Image registration (Zitova, 2003) is required in
many applications including remote sensing, sensor
fusion, stereo vision, panoramic imaging, noise
reduction, hyper resolution, 3D imaging. Basically,
image registration can be defined as the process of
overlaying two or more images of the same scene
taken at different times, from different viewpoints,
and/or by different sensors. Efficient implementation
of the overlaying technique of the two images is
especially important for stereo where even small
registration errors might greatly affect the
construction of the 3D model. Due to its relevance,
the topic of image registration and object matching
has been widely studied and a variety of approaches
had been proposed (Zitova and Flusser (2003),
Cyganek and Siebert (2009), Mühlmann, Maier,
Hesser and Männer (2002), Shechtman and Irani
(2007), Scharstein and Szeliski (2002)). Object
based matching methods are widely used in
stereovision. Matching of the objects in two stereo
images is necessary in order to obtain 3D
information on the object. Several of the proposed
approaches employ cross-correlation to perform
image registration, however this is computationally
intensive. Different real-time solutions of the
correlation-based registration have been
implemented on a variety of hardware.
Generally, registration methods assume two
main constraints:
1. The epipolar geometry constraint according to
which the corresponding points lay on the
epipolar lines of two images.
2. The uniqueness constraint according to which
the objects within the image are unique.
While the epipolar constraint can be applied on a
calibrated stereo set, the uniqueness constraint
presents serious limitations, especially when the
information is attained with a set of moving
cameras. However, in real scenarios there are many
cases where an object inside a region of interest
(ROI) does not have a unique appearance, but
appears more than once in the search window
(Figure 1). In these cases the registration algorithms
fail to provide accurate results.
In order to estimate the distance to an object
using stereo vision, the object needs to be identified
in both stereo images. When a repetitive object
exists in one image, it might have several matching
objects on the other image. As a result, a wrong
object might be selected and the 3D result will be
deformed. In order to avoid this deformation we
need to recognize repetitive objects and to take them
into consideration when performing the matching. In
most cases, a correlation algorithm is used to
perform image registration and to identify the same
198
Nehmadi Y., Kalantyrsky O. and Guterman H. (2012).
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS IN STEREOSCOPY.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 198-205
DOI: 10.5220/0003778501980205
Copyright
c
SciTePress

object at corresponding points in the two images of a
stereo pair.
Such algorithms are known to fail when:
- there are repetitive objects
- the area has only a little texture
- disparities vary rapidly within the correlation
window
- an occlusion exists
- the image does not comply to the ordering
constraint (Gong and Yang, 2003).
Figure 1: An example of repetitive objects: the windows in
the building are repetitive (see red arrows).
Over the years several attempts have been made
to overcome these problems (Okutomi and Kanade
(1993), Szeliski and Scharstein (2002)). In many
cases, the algorithms ignore problematic locations
such as repetitive objects or occlusions in order to
avoid significant depth errors. However, removing
those locations from the calculations is problematic
since the distance to these objects is not calculated
and is missing in the results.
An example of this approach has been presented
by Fua (1993) who uses a consistency criterion to
reject invalid matches. The matching is performed
twice for each template/pixel. The first time, the
template is taken from the first image and matched
to the second. The second time, the template is taken
from the second image and matched to the first.
Only when both matchings result in the same
location is the matching considered valid. Otherwise
the templates/pixels are rejected. This method rejects
repetitive objects and the distance to those objects is
not calculated. The advantage in our approach is that
instead of rejecting the repetitive objects we find
those objects and remove the repetition by adding a
location that stops the repetition.
Szeliski and Scharstein (2002) presented an
algorithm for stereo matching that addresses two
factors - the uniqueness constraint and the stereo
occlusions. The algorithm uses the symmetric
matching of Fua (1993) to detect ambiguous
matching of repetitive objects. It resolves this
ambiguity using adaptive window approach that
enlarges the template size to include non-repetitive
objects (Kanade and Okutomi, 1994). In general, the
template should be large enough to include enough
texture for correlation matching. On the other hand,
it should be small enough to avoid unwanted
smoothing and the effects of projection distortion.
The probability of mismatching decreases as the size
of the template increases. Too small a template will
result in poor disparity estimation, since the signal-
to-noise ratio is low due to the lack of texture.
However, when the template is too large it leads to
loss of accuracy due to disparity changes within the
template. This causes different projection distortions
in both images. In addition, a large window
contributes to additional noise from regions without
texture (Kanade and Okutomi, 1994). In these cases,
the position of the maximum correlation may not
represent accurately the correct matching. Kanade
and Okutomi (1994) suggested a method for
adaptive window size selection. This approach
increases the template size iteratively and calculates
the uncertainty of matching. The template size
increases as long as the uncertainty of matching
decreases. The method presented in our paper finds
the regions that need to be added to the original
template directly without any iterations.
Additionally, instead of enlarging the whole
template size we add to the template only one region
that resolves the matching uncertainty.
In this paper, a new method for dealing with
repetitive objects in stereo images is proposed. The
proposed method creates a composed template based
on multiple small templates that contain relevant
information and removes regions that might yield
bad results such as regions without texture or
regions with large disparity changes. An instance of
the repetitive object in combination with the object
that breaks the repetition creates a unique composed
template. The method is computationally less
intensive than most other approaches.
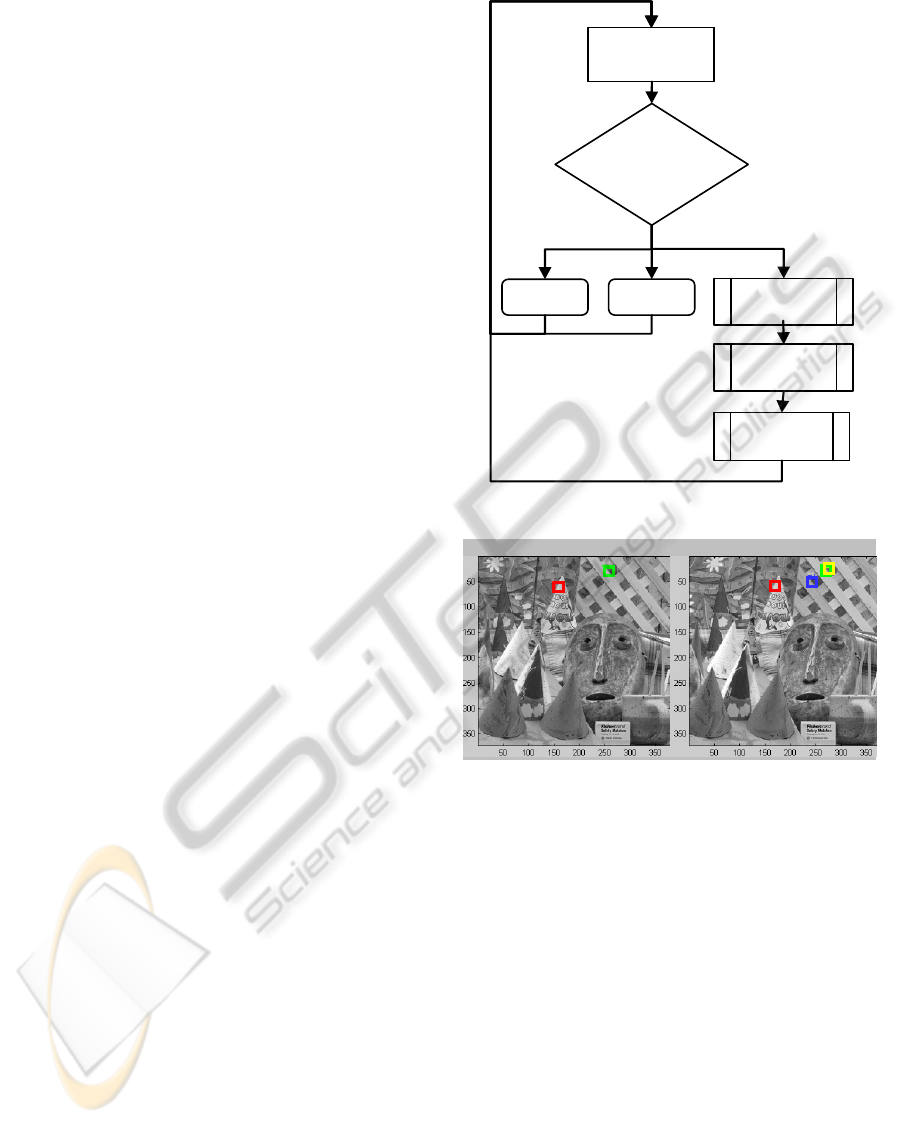
2 METHOD AND
IMPLEMENTATION
Feature based stereo techniques match templates
from the left image to those in the right. Templates
were selected in regions with high intensity
variations (edges, corners, etc.). A flow chart of the
algorithm is shown in Figure 3. The main steps of
the algorithm are described below:
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS IN STEREOSCOPY
199
1. Correlation of the template from the left image
with the right image.
2. Check how many valid peaks exist in the
correlation map. Three options exist:
i. No peak results in matching. The
template location should be omitted from
the 3D map. Go to Step 1 for next
template.
ii. One peak identifies a unique matching of
the template. Go to Step 1 for next
template.
iii. More than one peak is detected. The
template is labeled as “suspected to be
repetitive”. In this case the algorithm
should continue to Step 3.
3. Verify the repetitiveness of the template on the
left image. This part of the algorithm is described
in details in section 2.1 below. If the template is
confirmed to be repetitive, the algorithm should
continue to Step 4, otherwise the template is
disqualified and the algorithm continues to Step
1 for next template.
4. Composing the unique template: An additional
template that breaks the repetition is added to the
original template (see section 0 for details). This
composed template is used for correction of the
matching in the next step.
5. Correlation of the composed template: the
composed template contains the original
template and the unique template (found in Step
4). The composed template is used to obtain the
matching location as presented in section 0
below.
6. Go to Step 1 for next template.
Figure 3 presents an example of composed
template correlation matching. The repetitive
template is marked green on the left image. This
template was matched using normalized cross-
correlation to the right image. Two matches were
found on the right image. The first match is marked
green and the second match is marked blue on the
right image. The algorithm added an additional
template that together with the original repetitive
template composes unique template. The purpose of
an additional template is to break the repetition and
to select the correct match among the repetitive
matches. The additional template is marked red on
the left image.
The correlation of the composed template
corrected the matching of the repetitive template.
The selected match is marked yellow (same location
as the second match marked blue).
How many valid
peaks exist on
the correlation
map ?
Matching
found
No
Matchin
g
Compose unique
template on the
left ima
g
e
0
1>1
Correction of
matching
location
Repeat for each template on the left image
Correlate template
from left image with
the right image
Verification of
template
repetitiveness
Figure 2: Flow chart.
Left Image
Right Image
Figure 3: Template location on the left and right images.
2.1 Verification of Template
Repetitiveness
In order to find the location of the template from the
left image on the right image, normalized cross-
correlation is performed. The peaks in the
correlation map represent matching. When this
template is repetitive there is more than one valid
peak in the correlation map. The algorithm checks
this by comparing the second maximum value to the
first maximum value. If the values are close (e.g.
their ratio is bigger than 0.8), the algorithm verifies
the repetitiveness of the template on the left image.
This time the normalized cross-correlation of the
template is performed on the left image. The
maximum value in the correlation map identifies the
original location of the template. In order to verify
template repetitiveness, the algorithm compares the
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
200
second maximum value to the first maximum value
of the correlation map. If the ratio is bigger than
predefined threshold (0.7), repetitiveness
verification succeeded and the algorithm to reduce
repetitiveness is activated as described in section 0.
An example is given in Figure 4 . The location of
the first maximum is marked green and the location
of the second maximum is marked blue in the first
image (Figure 4 (a)). The peaks are marked on the
correlation map at the bottom.
(a)
(b)
(c)
Search window centered on template location
Template
Correlation map
Figure 4: (a) Search window with repetitive template. (b)
The template. (c) Correlation map of the template and
search window.
2.2 Selection of a Unique Template
A “composed unique template” is composed of the
original repetitive template and an additional unique
template. This section describes how to find such an
additional unique template. The selection of the
additional unique template is performed on the
original left image.
In order to identify an additional template that
would break the repetition, two image fragments
have to be clipped from the left image. These image
fragments are centered on the first and the second
repetition locations of the template, and subtracted
one from the other. High values in the result of
image subtraction represent locations that do not
repeat as frequently as the repetitive templates. The
pattern that defines the uniqueness should be
selected from the subtraction result in the areas with
high values.
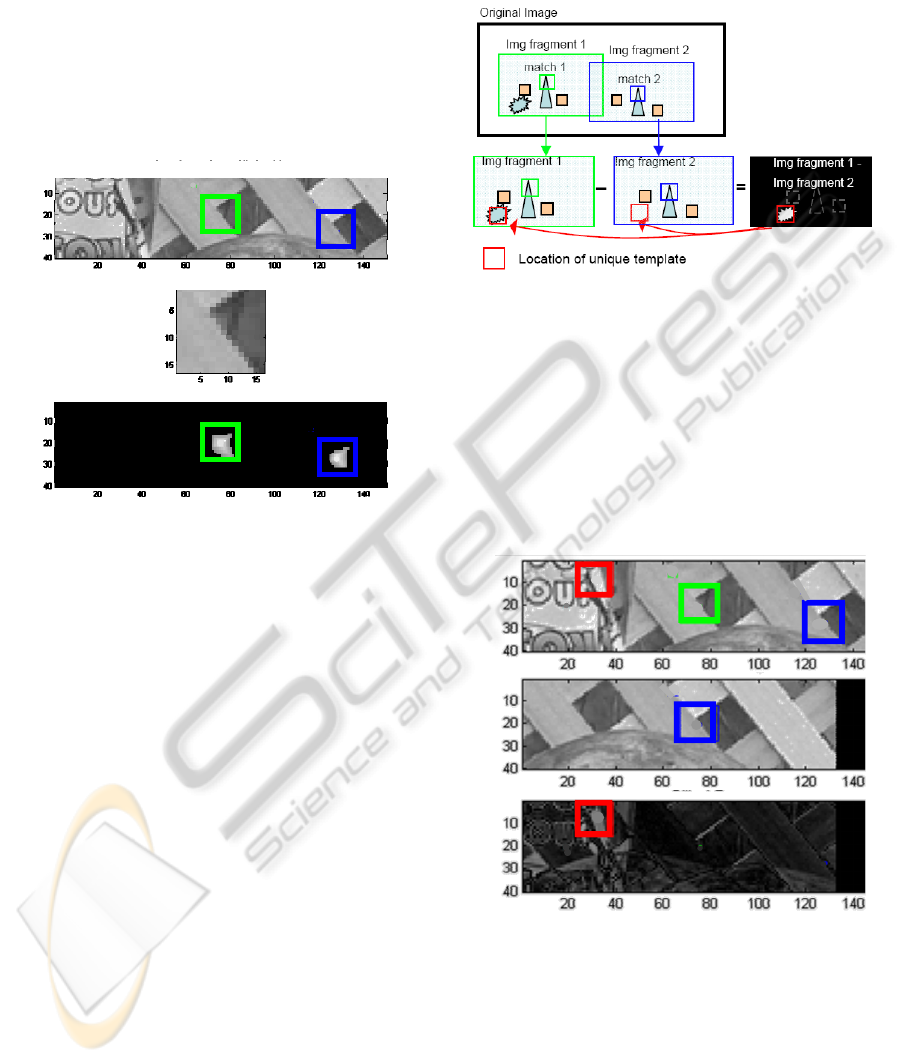
Figure 5 shows an example of a schematic
image, in which match 1 and match 2 are locations
that result from the first and second peaks of the
correlation. The image fragments are cropped and
centered on match 1 and match 2 locations. Image
fragment 1 contains an object that breaks the
repetition. The image fragments are subtracted. The
object that breaks the repetition contributes high
values to the subtraction result.
Figure 5: Finding a unique template to avoid repetitions.
An example of a real image is shown in Figure 6.
Two image fragments are clipped from the original
left image and centered on the template repetition
locations – on the first and second peaks. The image
fragments are shown in
Figure 6 (a)-(b). The bottom
image represents the subtraction of these two image
fragments. The high values (bright points) on the
subtraction are locations that do not repeat with the
same frequency as the repetitive template.
Figure 6: Subtraction of image fragments with repetitive
template. (a) Image fragment centered on first maximum
location is marked in green. (b) Image fragment centered
on second maximum location is marked in blue. (c) The
subtraction result. The red mark represents maximum
value in the subtraction result.
Two additional conditions are important for
template selection:
1. For better correlation results, an additional
template should be selected in the area that
(a)
(b)
(c)
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS IN STEREOSCOPY
201

contains patterns (edges/corners).
2. To minimize distortion caused by the
different perspectives of the stereo vision, the
unique template should be selected close to
the original template location (first
maximum).
2.3 Correlation of the Composed
Template
In the previous section we described how to
compose a unique template on the left image. An
additional template that breaks the repetition was
added to the original repetitive template. This
section describes how to correlate the composed
unique template with the right image to obtain the
matching of the repetitive object.
An additional template was selected in the
neighborhood of the original repetitive template. We
assumed that stereo distortion did not have a
significant effect on the distance between these two
objects within the stereo images. This means that the
distance in pixels between the original repetitive
template and the unique template is similar in both
images.
The matching of the templates is performed by
normalized cross-correlation, which selects search
windows on the right image.
Two search windows for matching both
templates are clipped from the left image. The
search windows are centered on the coordinates of
the templates, according to their original location on
the left image. An example is shown in
Figure 7, where the selected repetitive template
coordinates within the left image (x
1
,y
1
) are marked
in green on the left image. The search window on
the right image is centered (x
1
,y
1
), where it appears
as a blue (yellow) rectangle on the right image. A
search window for the unique pattern is similarly
selected. In the figure, the unique pattern coordinates
(x
2
,y
2
) on the left image are marked red. The search
window on the right image is selected with the
center on (x
2
,y
2
) on the right image. It appears as a
pink rectangle.
The matching of the templates and their search
windows is performed by normalized cross-
correlation as defined below.
()()
()()
N
y
y
N
x
x
yyxx
yyxx
C
xy
==
−−
−−
=
∑∑
∑
,,
22
(1)
The normalized correlation result is a map with
values between 0 and 1.
Left Ima
g
e
Ri
g
ht Ima
g
e
(x1,y1)
(x1,y1) (x2,y2)
(x2,y2)
Figure 7: Selection of search windows on the right image.
(a) (b)
(c) (d)
(e)
Left Ima
g
e
Ri
g
ht Ima
g
e
Unique Correlation Map
Right Image Legend:
First match for
template
_u_
Unique
template match
_ok_
_m1_
Final match for
template
_m2_
Second match
for template
Left Image Legend:
Template
Unique Template
u
m1
Multiplication of
two correlation ma
p
s
Template Correlation Map
ok
ok
m2
m1
m2
Figure 8: Combining templates by element-by-element
multiplication of two correlation maps. (a) On the left
image the template is marked green and the unique
template is marked red. (b) Right image, where first
matching peak marked green, second peak – blue, third
peak – pink. The unique template is marked in red and the
final repetitive match is selected in the location marked in
yellow. (c) Correlation map of the unique template. (d)
Correlation map of the template. (e) Element-by-element
multiplication between two correlation maps (c) and (d).
In order to select the correct matching of the
repetitive pattern, the element-by-element
multiplication of the correlation map in the repetitive
template and its search window is calculated. The
multiplication of both correlations removes
redundant maximums (Figure 8(e)). This process
enables us to correct the template location. Element-
by-element multiplication of two normalized cross-
correlation maps results also in a map with values
between 0 and 1. This result is close to 1 if two
combined templates were perfectly matched and
their stereo displacement was equal, but would be
close to 0 if the templates do not match (see Figure
8). The repetitive template is marked in green and
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
202

the unique template is marked in red on the left
image (Figure 8(a)). The correlation between the
repetitive template and the right image (Figure 8(b))
results in three peaks, which are shown in Figure
8(d). The correlation between the unique template
and the right image results in two peaks, which are
shown in Figure 8(c). Element-by-element
multiplication of the two correlation maps (Figure
8(e)) results in one peak only, which identifies the
registration between the two images.
The combining template algorithm is calculated
as:
ytytytt
CCC
2121
)(
•
≅
⊕
(2)
where t
1
, t
2
are two templates,
yt
C
1
yt
C
2
are two
correlation maps of template t
1
with image y and
template t
2
and image y respectively.
ytyt
CC
21
•
is
element by element multiplication of
yt
C
1
and
yt
C
2
.
The
ytt
C
)(
21
⊕
represents correlation between the
template combined from t
1
and t
2
with the image y.
Legend:
First match for
template
_u_
Unique
template match
_ok_
_m1_
Final match for
template
_m2_
Second match
for template
_m3_
Third match
for template
Template Correlation Map
m1
m2
ok
Multiplication of two correlation maps
ok
ok
(a)
(c)
(e)
u
u
Unique Correlation Map
(d)
(b)
Figure 9: Correction of template location. (a) Image
fragment centered on first peak location. (b) Image
fragment centered on unique template location. (c)
Correlation map template. (d) Correlation map for the
unique template. (e) Element-by-element multiplication of
two correlation maps (c) and (d).
An example of a real image is shown in Figure 9:
(a) - the search window for the repetitive template,
(b) - the search window for the unique pattern, (c) -
the correlation map of the repetitive template and the
search window, (d) - the correlation map of the
unique template and its search window. The
element-by-element multiplication of both
correlation maps is shown in Figure
9(e). The
highest value location on the multiplication
identifies the peak that represents the matched
template location.
3 EXPERIMENTAL RESULTS
The effectiveness of the proposed method was
tested. The accuracy of the matching results and the
computational complexity were evaluated.
3.1 Algorithm Accuracy
The algorithm identifies templates on the left image
and performs the matching on the right image. The
method for matching repetitive templates described
in section 2 was applied on the templates. Every
matching was reviewed manually and acknowledged
as correct matching or failure. Table 1 shows the
number of templates that were selected on the left
image and matched to the right image. The templates
are divided into two categories: repetitive and non-
repetitive. Table 1 represents the results of the
experiment of a real stereo pair. The table represents
the results for the matching performed with template
size of 5x5 pixels on a real image with the size of
700x700 pixels.
Table 1: Results for stereo matching on real image.
Template Count Success Rate
Non-repetitive templates
48 92%
Repetitive templates
33 94%
Total templates
81 93%
3.2 Algorithm Complexity
Calculation time of the template matching is a major
limitation in real time implementation. The
computation time is dependent in a square ratio with
the template size. Using two small templates instead
of one large template can significantly reduce the
calculation time. An example of the usage of two
small templates instead of one large template is
shown in Figure 11. The repetitive template is
marked green. The additional template selected by
the method is marked red. The small templates have
the size of 20x20 pixels. Known methods that do not
deal with repetitive images would have to select a
larger template size in order to include regions that
are not repetitive. The large template in this example
is marked in pink. The computational ratio in this
example is 1/45. In many cases of typical urban
scenes we observed a ratio of 1/40.
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS IN STEREOSCOPY
203

Legend: - non repetitive templates; - repetitive templates
Figure 10: Stereo matching results on real stereo images.
Kanade and Okutomi (1994) described a method
that increases the template size sufficiently to
include high local intensity variations but with low
disparity. The method can be used to enlarge the
template in order to include objects that break the
repetitiveness. The disadvantage of Kanade's method
is the increasing complexity due to the large
template size. The template size has a direct effect
on the matching complexity. The complexity of the
normalized cross correlation is O(m×n×M×N),
where the template size is m×n and the search
window size is M×N.
The method presented in this section can be used
for improving Kanade's methodology and reduce its
complexity. Instead of enlarging the template we use
only a subset of the large template by selecting an
additional small template which contains a non-
repetitive area that breaks the repetition of the
original repetitive template. The complexity of
template correlation is
MN
×
, where N is the
template size and M is the search window. Kanade's
method results in a complexity of
P
NM××
, where
P is the number of iterations required. In the
methodology presented in this article we use only
two small templates, hence the complexity is
MNs ×2
, where the size of the small template is
Ns
. Generally the unique template is located at a
certain distance from the repetitive template,
therefore
NNs <<
and the complexity of the method
presented here is significantly better than the
adaptive template size approach of Kanade (1994).
Figure 11: Urban scene with repetitive objects.
4 CONCLUSIONS
In this paper a novel method for pattern recognition
of repetitive templates has been presented. When
applied to stereo imaging the proposed method
solves the matching aspects for repetitive templates.
Most stereo algorithms either ignore repetitive
patterns or fail to identify them. Algorithms that
address repetitive templates dynamically enlarge the
template size in order to include unique areas. The
presented method is based on identifying an
additional pattern that in combination with the
repetitive pattern creates a unique template.
By using small templates this novel method
addresses the problem of computational efficiency.
Instead of performing correlation on large templates,
this method uses a unique pattern constructed from
two small templates. Usage of small templates is
more efficient in computational aspects, for example
for computing cross-correlation. Normalized cross-
Large template size 250 X 150
Small templates size 20 X 20
150250
02022
45
1
Ratio
×
×
×
≅=
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
204

correlation matching has a complexity of
22
KN ⋅
for the search window with size of NxN and with
template size of KxK. Adding an additional template
would require
22
2 KN ⋅
computations instead of
22
LN ⋅
, where
K
L >
and
22
2
K
L >>
. In addition
to the computational advantage, matching of small
features results in lower noise. Matching of
featureless regions causes noisy results. In the
presented method small templates are selected in
high density variation areas, hence less featureless
regions are reflected in the correlation.
REFERENCES
Brown, M. Z., Burschka, D. and Hager, G. D. (2003).
Advances in Computational Stereo. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 25, 993-1008.
Cyganek, B. and Siebert, J. P. (2009). An Introduction to
3D Computer Vision Techniques and Algorithms,
Wiley.
Fua, P. (1993). A Parallel Stereo Algorithm that Produces
Dense Depth Maps and Preserves Image Features.
Machine Vision and Applications, 6, 35-49.
Hirschmüller, H. and Scharstein, D. (2007). Evaluation Of
Cost Functions For Stereo Matching. IEEE
Conference on Computer Vision and Pattern
Recognition, 1-8.
Gong, M. and Yang, Y. H. (2003). Fast Stereo Matching
Using Reliability-Based Dynamic Programming and
Consistency Constraints. Proceedings of the 9th IEEE
International Conference on Computer Vision, 1, 610-
612.
Kanade, T. and Okutomi, M. (1994). A Stereo Matching
Algorithm with an Adaptive Window: Theory and
Experiment. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 16, 920-932.
Mühlmann, K., Maier, D., Hesser, J. and Männer, R.
(2002). Calculating Dense Disparity Maps from Color
Stereo Images, an Efficient Implementation.
International Journal of Computer Vision, 47, 79-88.
Okutomi, M. and Kanade, T. (1993). A Multiple-Baseline
Stereo. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 15, 353-363.
Scharstein, D. and Pal, C. (2007). Learning Conditional
Random Fields for Stereo. IEEE Conference on
Computer Vision and Pattern Recognition.
Scharstein, D. and Szeliski, R. (2002). A Taxonomy and
Evaluation of Dense Two-Frame Stereo Correspon-
dence Algorithms. International Journal of Computer
Vision, 47, 7-42.
Shechtman, E. and Irani, M. (2007). Matching Local Self-
Similarities across Images and Videos, IEEE
Conference on Computer Vision and Pattern
Recognition, 511–518.
Szeliski, R. and Scharstein, D. (2002). Symmetric Sub-
Pixel Stereo Matching. Proceedings of the 7th
European Conference on Computer Vision – Part II,
525-540.
Zitova, B. and Flusser, J. (2003). Image registration
methods: a survey. Image and Vision Computing,
21(11), 977-1000.
FAST TEMPLATE MATCHING OF REPETITIVE OBJECTS IN STEREOSCOPY
205
