
A GENERAL ALGORITHM FOR CALCULATING FORCE
HISTOGRAMS USING VECTOR DATA
Daniel Recoskie, Tao Xu and Pascal Matsakis
School of Computer Science, University of Guelph, Guelph, Ontario, Canada
Keywords: Relative position descriptors, Shape descriptors, Polygonal objects.
Abstract: The histogram of forces is a generic relative position descriptor with remarkable properties, and it has found
many applications, in various domains. So far, however, the applications involve objects in raster form. The
fact is that several general algorithms for the computation of force histograms when dealing with such
objects have been developed; on the other hand, there is no general algorithm available for objects in vector
form, and the algorithms for raster objects cannot be adapted to vector objects. Here, the first general
algorithm for calculating force histograms using vector data is presented.
1 INTRODUCTION
The histogram of forces is a generic relative position
descriptor with high discriminative power and
remarkable properties. It was introduced by Matsakis
and Wendling (1999) with the aim of developing
new models of directional relations (such as right,
left, above, below) between 2-D objects. The spatial
organization of 2-D objects is a subject of interest in
many disciplines (e.g., computer science, cognitive
science, linguistics, geography), with applications in
various domains (e.g., medical imaging, robot navi-
gation, content-based image retrieval, geographic
information systems). The histogram of forces has
been used, e.g., in a geospatial information retrieval
and indexing system (Shyu et al., 2007); for scene
matching (Sjahputera and Keller, 2007); to interpret
human-to-robot commands and generate robot-to-
human feedback (Skubic et al., 2004); along with a
land cover classification system (Vaduva et al., 2010).
Many other applications are mentioned in a recent
paper by Matsakis et al. (2011): the classification of
skull orbits and sinuses; the recognition of graphical
symbols in technical line drawings; the translation of
hand-sketched route maps into linguistic descrip-
tions; etc. The above-mentioned applications deal
with 2-D objects in raster form. These objects can be
crisp or fuzzy, connected or disconnected, with or
without holes, disjoint or overlapping. The fact is
that several general algorithms for the computation
of force histograms when dealing with such objects
have been developed. The traditional algorithm
(Matsakis and Wendling, 1999) runs in O (Kk
2
N
√
N)
time, where K is the number of directions in which
forces are considered, k is the number of nonzero
membership degrees and N is the number of pixels
in the image. A variant runs in O (KkN
√
N) time.
Another runs in O (KN
√
N) (Wang et al., 2004). A
completely different algorithm is in O (N logN) (Ni
and Matsakis, 2010). Which algorithm or variant
performs better under which conditions is an issue
discussed by Ni and Matsakis (2010). As these
authors acknowledge, however, the algorithms
above cannot be adapted to objects in vector form,
and there is no general algorithm for the compu-
tation of force histograms in the case of vector
objects (Matsakis et al., 2011). The present paper
fills this important lacuna. The concept of the
histogram of forces is described in Section 2. The
new algorithm is introduced in Section 3.
Experimental results follow in Section 4, and
Section 5 concludes the paper.
2 BACKGROUND
2.1 Objects
Consider a fuzzy subset A of the Euclidean plane.
Every point p of the plane has therefore a grade of
86
Recoskie D., Xu T. and Matsakis P. (2012).
A GENERAL ALGORITHM FOR CALCULATING FORCE HISTOGRAMS USING VECTOR DATA.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 86-92
DOI: 10.5220/0003781600860092
Copyright
c
SciTePress

membership in A. This grade, A(p), is 0 if p does not
belong to A at all; it is 1 if p totally belongs to A; it is
a value between 0 and 1 otherwise, and the greater
A(p) the more p belongs to A. The α-cut of A, where
0<α≤1, is the (crisp, ordinary) set of points p such
that A(p)≥α. In this paper, an object is a fuzzy subset
A of the Euclidean plane such that any A(p) belongs
to the set {α
1
,α
2
,…,α
k+1
}, with 1=α
1
>α
2
>…>α
k+1
=0,
and the intersection between any α
i
-cut of A and any
straight line has a finite number of connected
components.
2.2 Force Histograms
Consider two distinct infinitesimal particles p and q
of mass m and n. According to Newton’s law of
gravity, p exerts on q the force
mn / | |
3
, (1)
where
→
qp
is the vector from q to p and |
→
qp
| its
length. This force tends to move q towards p, and its
magnitude is mn / |
→
qp
|
2
. Now, consider two objects
A and B. They can be seen as flat metal plates of
constant and negligible thickness: the area mass
density of A at point p is the grade of membership
A(p), and the area mass density of B at q is B(q).
Every point p of A exerts on every q≠p of B an
infinitesimal gravitational force, and the vector sum
of all these forces, i.e., the resultant force exerted by
A on B, can be found using integral calculus.
Instead, consider a real number r and a direction θ,
replace (1) with (2), or with (3), and calculate the
magnitude
ϕ
r
AB
(θ) of the vector sum of all the
infinitesimal forces in direction θ (Fig. 1). The
function
ϕ
r
AB
so defined is called a force histogram.
It is one possible representation of the position of A
relative to B.
mn / | |
r+1
(2)
min{m, n}/ ||
r
+1
(3)
Figure 1: Every point of A exerts on every point of B an
infinitesimal force. Using integral calculus, find the vector
sum of the forces in direction θ. Its magnitude is
ϕ
r
AB
(θ)
.
2.3 Properties
The interest in force histograms lies in the fact that
they are relative position descriptors with high
discriminative power and remarkable properties.
Consider a real number r and two objects A and
B. Equation (4) holds for any θ.
(4)
Let rot be a ρ-angle rotation and let sca be a uniform
scaling with positive scale factor λ. The force
histograms
ϕ
r
rot (A) rot (B)
and ϕ
r
sca( A) sca(B)
can be
expressed in terms of
ϕ
r
AB
. Equations (5) and (6)
hold for any θ.
(5)
(6)
Actually, any
ϕ
r
aff (A) aff (B)
, where aff denotes an
invertible affine transformation, can be expressed in
terms of
ϕ
r
AB
. See (Matsakis et al., 2011) (Ni and
Matsakis, 2010) for details. Note that the grade of
membership of a point p in the object aff(A) is, by
definition, aff(A)(p)=A(aff
−1
(p)); likewise,
aff(B)(p)= B(aff
−1
(p)). Now, let A
i
denote the α
i
-cut
of A and let B
j
denote the α
j
-cut of B. If the forces
are as in (2), then (7) holds; and if they are as in (3),
then (8) holds.
(7)
(8)
Assume A and B are crisp, i.e., all grades of
membership are in {0,1}. Consider a tuple (A
1
, A
2
,
…, A
a
) of crisp objects, where a is a positive integer.
Assume the interior of A
i
∩ A
j
is empty for any i≠j
and the closure of A is equal to the closure of ∪
i
A
i
.
We then say that (A
1
, A
2
, ..., A
a
) is a partition of A.
Likewise, assume (B
1
, B
2
, ..., B
b
) is a partition of B.
Equation (9) holds for any θ.
(9)
r has an interesting impact on the histogram. When r
is zero,
ϕ
r
AB
responds equally to changes in the
closest parts and in the farthest parts of A and B.
When r< 0, it responds more to changes in the
farthest parts, and the greater | r | the more
asymmetric the response. When r > 0, it responds
more to changes in the closest parts; so much so that
the histogram values are infinite if, e.g., r ≥1 and the
objects overlap (i.e., the interior of their intersection
is not empty). Finally, note that the relative position
descriptor
ϕ
r
AB
becomes a powerful shape descript-
→
qp
→
qp
→
qp
→
qp
→
qp
→
qp
ϕ
r
BA
(θ) =ϕ
r
AB
(θ+π)
ϕ
r
rot (A) rot(B)
(θ) =ϕ
r
AB
(θ−ρ)
ϕ
r
s
ca
(
A
)
s
ca
(
B
)
(
θ
)
=
λ
3−
r
ϕ
r
A
B
(θ)
ϕ
r
AB
(θ) = (α
i
−
j=1
k
∑
i=1
k
∑
α
i+1
)(α
j
−α
j+1
) ϕ
r
A
i
B
j
(θ)
ϕ
r
A
B
(
θ
)
=
(
α
i
−
α
i+1
)
ϕ
r
A
i
B
j
(θ)
i=1
k
∑
ϕ
r
AB
(θ) =ϕ
r
A
i
B
j
(θ)
j=1
b
∑
i=1
a
∑
A GENERAL ALGORITHM FOR CALCULATING FORCE HISTOGRAMS USING VECTOR DATA
87

(a) (b) (c)
Figure 2: Partitioning of the objects. (a) Each object is divided into trapezoidal pieces. Note that A and B are not necessarily
convex or disjoint: there may be more than two pieces between two consecutive lines, and some pieces may intersect. (b)
The trapezoids p
1
p
2
p
3
p
4
and q
1
q
2
q
3
q
4
are cut along the dotted lines into three pieces each. (c) p
1
p
2
p
3
p
4
is broken into p
1
q
2
q
3
p
4
and q
2
p
2
p
3
q
3
, and q
1
q
2
q
3
q
4
is broken into q
1
p
1
p
4
q
4
and p
1
q
2
q
3
p
4
.
(a) (b) (c) (d)
Figure 3: Two trapezoids A
i
and B
j
between two consecutive lines. There are 4 cases. Note that in (a), the trapezoids may
share one vertex or one edge; in (b) they may only share one vertex.
tor when r<1 and the two objects A and B are equal
(Matsakis et al., 2011).
3 ALGORITHM
3.1 Vector Objects
In the remainder of this paper, we assume that every
α
i
-cut of an object can be expressed using the union
and difference set operations in terms of a finite
number of simple polygons
P
1
i
,
P
2
i
,
P
3
i
, …, where
the edges of
P
u
i
and
P
v
i
do not intersect if u≠v.
Note that an object may be crisp or fuzzy, convex or
concave, connected or disconnected, and may have
holes in it. Practically, each object is described in a
text file as the list of its cuts (sorted by increasing
α
i
); each cut is described as a set of polygons (in any
order); each polygon as a list of vertices (listed either
clockwise or counterclockwise); each vertex as a pair
of coordinates
x and y.
3.2 Handling of Vector Objects
As per (7) and (8), the handling of any two objects
comes down to the handling of crisp objects. Let us
explain, therefore, how to calculate
ϕ
r
AB
(θ) when A
and B are crisp. First, a partition (A
i
) of A and a
partition (
B
j
) of B are obtained as follows. The
straight lines in direction θ that pass through the
objects’ vertices divide the objects into trapezoidal
(or triangular) pieces (Fig. 2
a). Consider a piece of A
and a piece of
B between two consecutive lines. If
two nonparallel edges of these pieces intersect, an
additional line in direction θ is drawn through the
intersection point. This line divides the two pieces
into smaller pieces (Fig. 2
b). Consider two of these
smaller pieces, between two consecutive lines. If an
edge of the piece of
A runs inside the piece of B, or
vice versa, both pieces are broken into even smaller
pieces (Fig. 2
c). The partitioning is then complete,
and
ϕ
r
AB
(θ) can be calculated as in (9). Note that
ϕ
r
A
i
B
j
(θ)
= 0 unless A
i
and B
j
are between two
consecutive lines. If they are, 4 cases must be
considered (Fig. 3): in each case,
ϕ
r
A
i
B
j
(θ)
can be
expressed in terms of r, θ, ε, x
1
, x
2
, y
1
, y
2
, z
1
, z
2
,
where
x
1
, x
2
, z
1
, z
2
are edge lengths and ε, y
1
, y
2
are
distances between edges (Fig. 4). These expressions
result from the calculation of triple integrals, and are
given in Table 2. The functions
f
1
, f
2
, f
3
, f
4
are as in
Table 1, and
t(θ) =
max{ cos(θ) ,sin(θ) }
.
4 EXPERIMENTS
The general algorithm for force histogram calculation
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
88
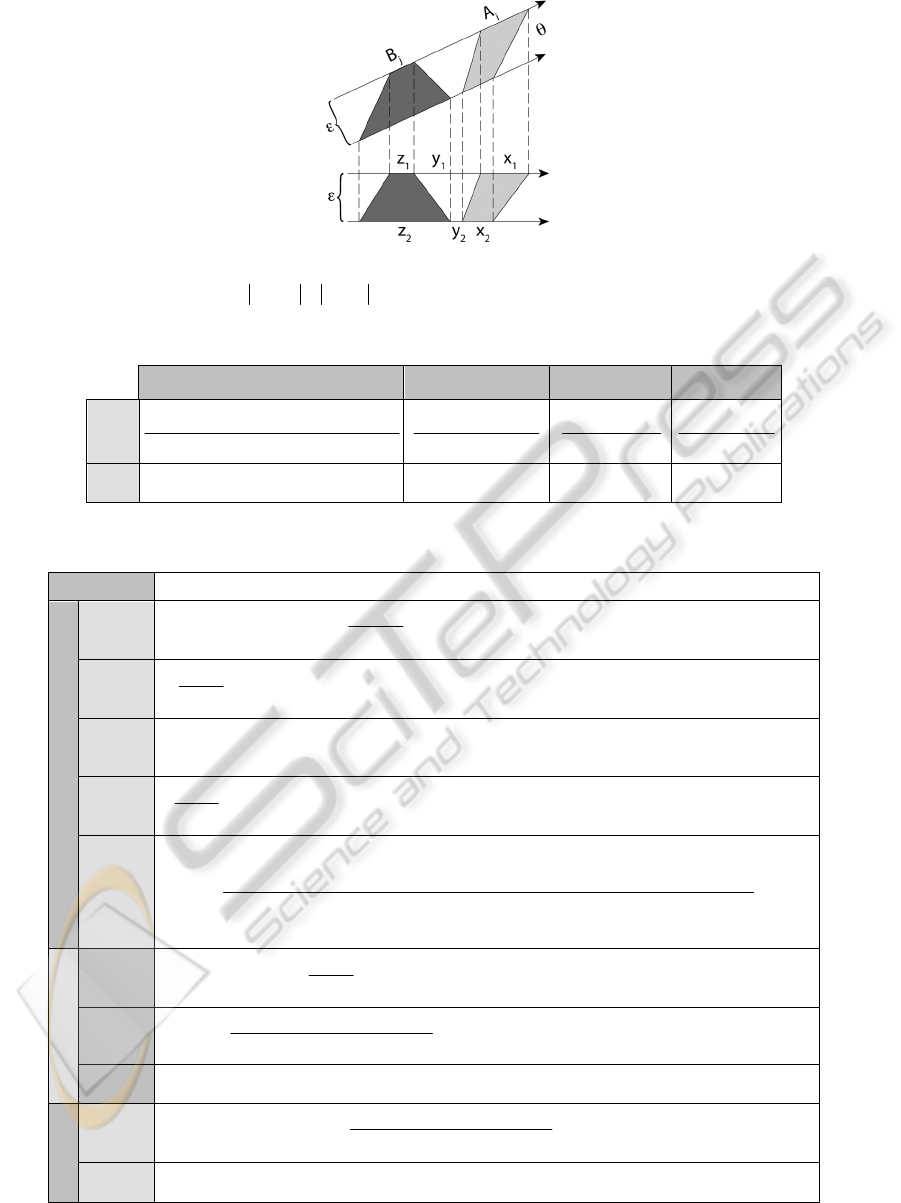
Figure 4:
ϕ
r
A
i
B
j
(θ)
can be expressed in terms of r, θ, ε, x
1
, x
2
, y
1
, y
2
, z
1
, z
2
. See Table 2. Note that the vertices of A
i
and Bj
are projected onto horizontal lines if
cos(θ) > sin(θ)
and onto vertical lines otherwise.
Table 1: The functions f
1
, f
2
, f
3
, f
4
.
f
1
(x, y) f
2
(x, y) f
3
(x, y) f
4
(x, y)
x
≠
y
x=y
x ln(x) 1+ln(x) 1/x
(3−r)
Table 2: Expressions for
ϕ
r
A
i
Bj
(θ)
. See Table 1 and Figs. 3-4.
BEFORE
0
AFTER
r = 0
[(x
1
+x
2
)(z
1
+z
2
)+x
1
z
1
+x
2
z
2
]
r = 1
[ f
1
(x
1
+y
1
+z
1
, x
2
+y
2
+z
2
)+f
1
(y
1
, y
2
)−f
1
(x
1
+y
1
, x
2
+y
2
)−f
1
(y
1
+z
1
, y
2
+z
2
)]
r = 2
− ε [ f
2
(x
1
+y
1
+z
1
, x
2
+y
2
+z
2
)+f
2
(y
1
, y
2
)−f
2
(x
1
+y
1
, x
2
+y
2
)−f
2
(y
1
+z
1
, y
2
+z
2
)]
r = 3
[ f
3
(x
1
+y
1
+z
1
, x
2
+y
2
+z
2
)+f
3
(y
1
, y
2
)−f
3
(x
1
+y
1
, x
2
+y
2
)−f
3
(y
1
+z
1
, y
2
+z
2
)]
else
ε [ f
4
(x
1
+y
1
+z
1
, x
2
+y
2
+z
2
)+f
4
(y
1
, y
2
)−f
4
(x
1
+y
1
, x
2
+y
2
)−f
4
(y
1
+z
1
,y
2
+z
2
)]
TOUCH
r = 1
[ f
1
(x
1
+z
1
, x
2
+z
2
)−f
1
(x
1
, x
2
)−f
1
(z
1
, z
2
)]
r <1 or
1< r <2
[ f
3
(x
1
+z
1
, x
2
+z
2
)−f
3
(x
1
, x
2
)−f
3
(z
1
, z
2
)]
else
+∞
EQUA
L
r<1
f
4
(x
1
, x
2
)
else
+∞
y
2
(ln(y) − 0.5) − x
2
(ln(x) − 0.5)
y − x
y ln(y)
−
x ln(x)
y − x
ln(y)
−
ln(x)
y − x
y
3−r
− x
3−r
y − x
x
2− r
ε
6 t(θ)
2
ε
2 t(θ)
ε t(
θ
)
2
t(θ)
2−r
(1 − r)(2 − r)(3 − r)
ε
2 t(θ)
ε
t(θ)
2−r
(1 − r)(2 − r)(3 − r)
ε
t(θ)
2−r
(1 − r)(2 − r)(3 − r)
A GENERAL ALGORITHM FOR CALCULATING FORCE HISTOGRAMS USING VECTOR DATA
89
in the case of 2-D vector objects was implemented in
C, and the experiments were conducted on a Mac
OS X 10.6, Intel Core 2 Duo, 2.4 GHz, 4 GB. If the
forces are as in (2), then (7) applies, and the
algorithm runs in O(Kk
2
η log η) time, where K is the
number of directions in which forces are considered, k
is the number of nonzero membership degrees (k=1
for crisp objects), and η is the total number of object
vertices. If the forces are as in (3), then (8) applies,
and the algorithm runs in O(Kk η log η). The η log η
part comes from the fact that for every direction θ
considered, the partitioning of the objects is
achieved by sorting the vertices following direction
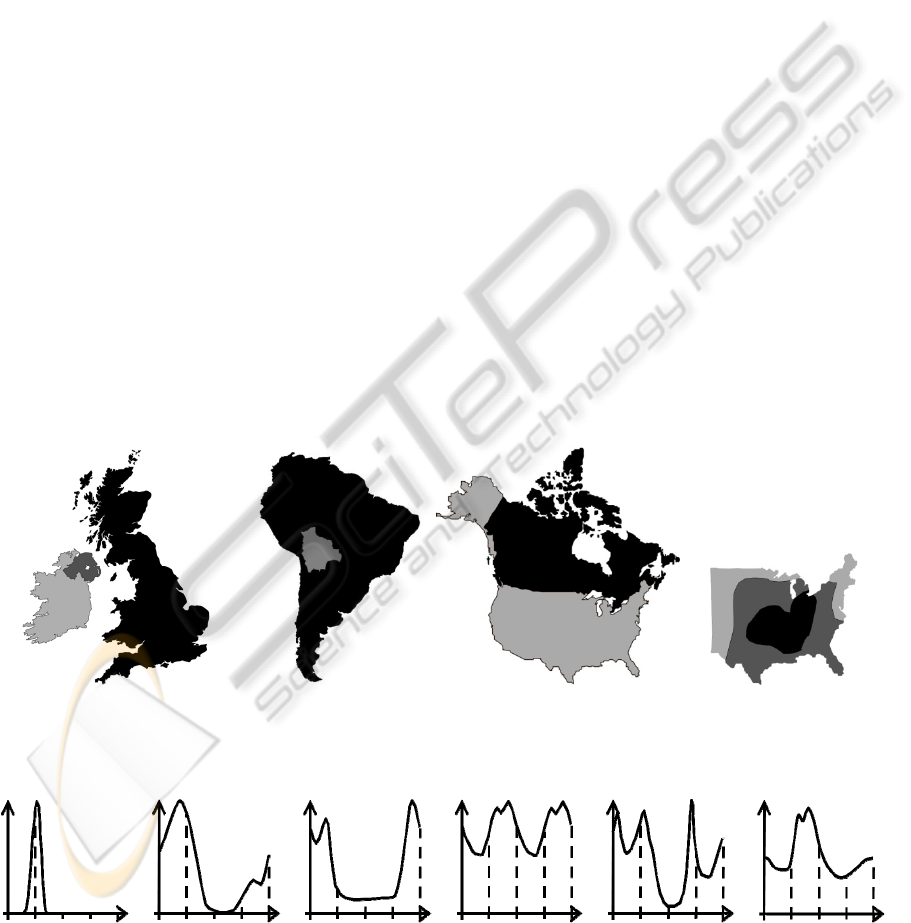
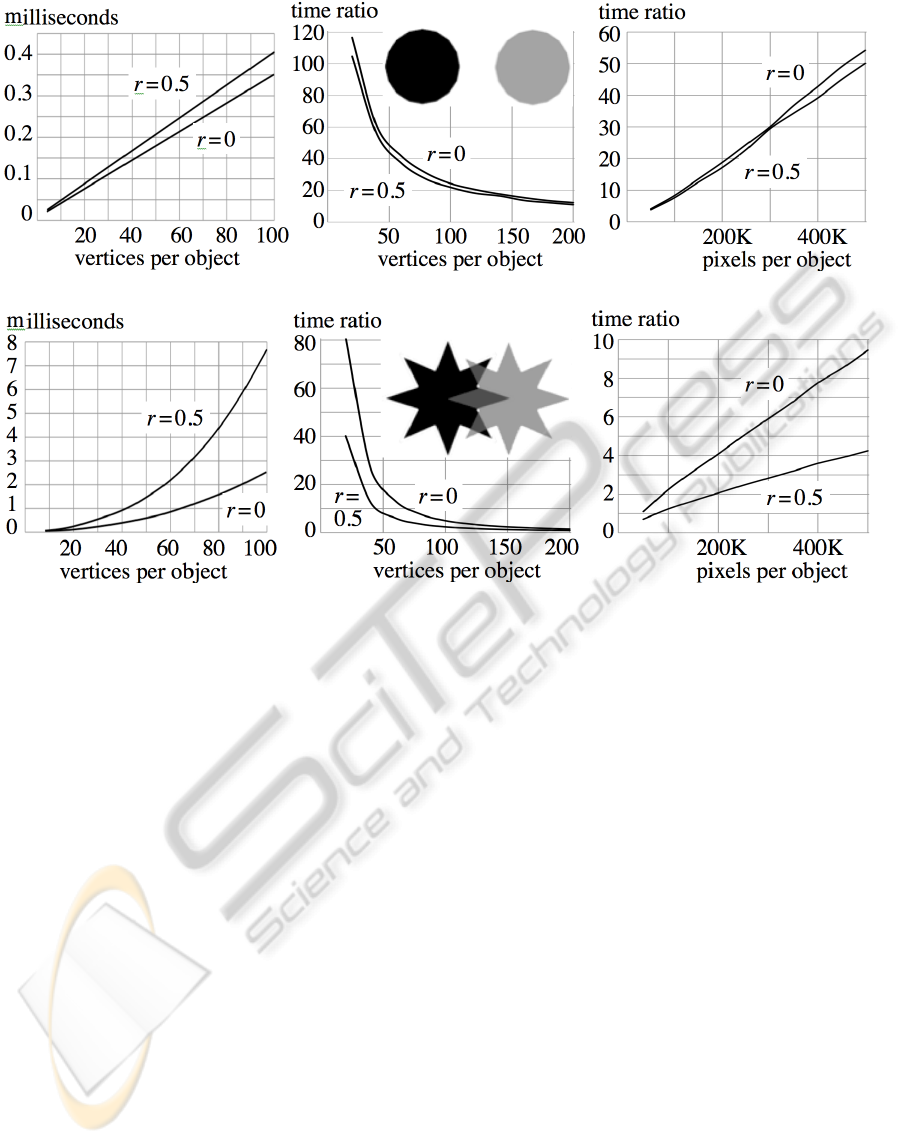
θ+π/2. Figures 5 and 6 show examples of objects
and related force histograms, and Fig. 7 shows the
processing times of crisp objects in a best case
scenario (a)(b)(c) and in a worst case scenario
(d)(e)(f). Note, (a)(d), that the processing time is
minimum when r = 0, maximum when r is not an
integer (all non-integer r values give about the
same processing times), and between these two
extremes when r is a nonzero integer. Times to
process objects in vector vs. raster forms are
compared in (b)(c)(e)(f). For example, (e),
calculating the histogram of constant forces (r = 0)
between two intersecting stars with 50 vertices each
(i.e., 25-pointed stars) is about 20 times faster if the
stars are in vector form (than if they are in raster
form and made of 250K pixels each; whatever the
raster algorithm used). Note that for every r and
every pair of objects considered in these
experiments, the histograms produced by the vector
and raster algorithms are visually indistinguishable,
and their similarity (as measured by the Tanimoto
index) is greater than 99.6%.
5 CONCLUSIONS
A relative position descriptor like the histogram of
forces which is endowed with remarkable properties
and able to handle any pair of 2-D objects (whether
these objects are crisp or fuzzy, connected or
disconnected, with or without holes, disjoint or
overlapping) is undoubtedly a most useful tool:
relative position descriptors are a natural complement
to colour, texture, and shape descriptors; the spatial
organization of 2-D objects is a subject of interest in
many disciplines; spatial regions are modelled by
fuzzy sets in an increasing number of applications
and areas; examples of regions with holes or
multiple connected components abound; examples
of regions that touch or overlap abound as well (in
particular,
fuzzy regions
often
naturally
overlap).
(a) (b) (c) (d)
Figure 5: (a) Britain and Ireland share Northern Ireland. (b) Bolivia in South America. (c) Canada and the U.S. (d) The risk
for strong or violent tornadoes in the U.S. is high (black), medium (dark gray), low (light gray), negligible (elsewhere).
(a) (b) (c) (d) (e) (f)
Figure 6: Examples of force histograms. In (a), the objects are disjoint (Canada relative to South America). In (b), they
touch (Canada relative to the U.S.). In (c), they overlap (Britain relative to Ireland). In (d), they are equal (the U.S.). In (e),
one includes the other (South America and Bolivia). In (f), one is crisp (the U.S.) and the other is fuzzy (tornado risk map).
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
90
(a) (b) (c)
(d) (e) (f)
Figure 7: Processing times; in each case, forces were computed in 100 evenly distributed directions. In (a)(b)(c), the objects
are crisp disjoint regular convex polygons; in (d)(e)(f), they are crisp intersecting star polygons. In (a)(d), the objects are in
vector form and the processing time is the average processing time per direction; note that in (a), only the directions with
nonzero forces were actually considered. In (b)(c)(e)(f), the time ratio is the time to process the two objects in raster form
divided by the time to process the same two objects in vector form. In (b)(e), each raster object is made of 250K pixels; in
(c)(f), each vector object has 100 vertices.
Until now, however, only objects in raster form
could be considered. In this paper, we have widened
the scope of the histogram of forces to objects in
vector form. Since polygons are a fundamental type
of data in, e.g., computer graphics and GIS, and are
also often used to approximate boundaries of raster
regions, this is a significant achievement which
should draw the interest of practitioners. Note that all
the programs for force histogram computation are
freely available upon request. We are currently
developing efficient general algorithms for the
handling of 3-D raster and vector objects.
ACKNOWLEDGEMENTS
The authors want to express their gratitude for
support from the Natural Science and Engineering
Research Council of Canada (NSERC), grant
262117.
REFERENCES
Matsakis, P., Wendling, L., 1999. A New Way to Repre-
sent the Relative Position of Areal Objects. In IEEE
Trans. on Pattern Analysis and Machine Intelligence,
21(7), 634-643.
Matsakis, P., Wendling, L., Ni, J., 2011. A General
Approach to the Fuzzy Modeling of Spatial Rela-
tionships. In Jeansoulin, R., Papini, O., Prade, H.,
Schockaert, S. (Eds.): Methods for Handling Imperfect
Spatial Information, Springer-Verlag, 49-74.
Ni, J., Matsakis, P., 2010. An Equivalent Definition of the
Histogram of Forces: Theoretical and Algorithmic Im-
plications. In Pattern Recognition, 43(4), 1607-1617.
Shyu, C. R., Klaric, M., Scott, G. J., Barb, A. S., Davis, C.
H., Palaniappan, K., 2007. GeoIRIS: Geospatial In-
formation Retrieval and Indexing System—Content
Mining, Semantics Modeling, and Complex Queries.
In IEEE Trans. on Geoscience and Remote Sensing,
45(4), 839-852.
Sjahputera, O., Keller, J. M., 2007. Scene Matching Using
F-Histogram-Based Features with Possibilistic C-
A GENERAL ALGORITHM FOR CALCULATING FORCE HISTOGRAMS USING VECTOR DATA
91

Means Optimization. In Fuzzy Sets and Systems,
158(3), 253-269.
Skubic, M., Perzanowski, D., Blisard, S., Schultz, A.,
Adams, W., Bugajska, M., Brock, D., 2004. Spatial
Language for Human-Robot Dialogs. In IEEE Trans.
on Systems, Man, and Cybernetics Part C, 34(2),
154-167.
Vaduva, C., Faur, D., Gavat, I., 2010. Data Mining and
Spatial Reasoning for Satellite Image Characterization.
In Proceedings of the 8
th
Int. Conf. on Communica-
tions (COMM), 173-176.
Wang, Y., Makedon, F., Drysdale, R. L., 2004. Fast
Algorithms to Compute the Force Histogram. Pattern
Recognition.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
92
