
DECOMPOSITION OF MULTIMODAL DATA FOR
AFFORDANCE-BASED IDENTIFICATION OF POTENTIAL GRASPS
Daniel Dornbusch
1
, Robert Haschke
1
, Stefan Menzel
2
and Heiko Wersing
2
1
CoR-Lab, Bielefeld University, Bielefeld, Germany
2
Honda Research Institute Europe GmbH, Offenbach, Germany
Keywords:
Decomposition algorithms, Multimodal data, Grasp identification.
Abstract:
In this paper, we apply standard decomposition approaches to the problem of finding local correlations in
multi-modal and high-dimensional grasping data, particularly to correlate the local shape of cup-like objects
to their associated local grasp configurations. We compare the capability of several decomposition methods to
establish these task-relevant, inter-modal correlations and indicate how they can be exploited to find potential
contact points and hand postures for novel, though similar, objects.
1 INTRODUCTION
We tackle the challenging problem of finding suitable
grasps for unknown objects employing well-known
decomposition approaches. In order to grasp an un-
known object, previously acquired grasping knowl-
edge from similar objects needs to be exploited and
adapted to the current situation. Because similar ob-
ject shapes, e.g. handles, also afford similar hand pos-
tures for grasping, we are looking for correlations be-
tween different modalities of successful grasping ex-
amples. Based on depth images and object silhouettes
extracted from color images, we aim for a prediction
of contact locations as well as an associated hand pos-
ture to realize the grasp. In doing so, we especially
focus on local shape features, because different local
parts of an object afford different grasps.
Unsupervised decomposition algorithms are able
to find statistically relevant correlations in high-
dimensional data sets, and thus are well-suited to the
task at hand. Applying them to a multimodal data set
allows for the identification of inter-modal, semanti-
cally meaningful correlations. The simultaneous use
of multimodal data in decomposition approaches can:
(i) improve the interpretability of the extracted ba-
sis components of each single modality, and (ii) ex-
tract functionally relevant correlations between dif-
ferent modalities. In Sec. 3, several decomposition
methods, briefly introduced in the next section, are
compared w.r.t. their ability to establish relevant inter-
modal correlations in training data, and to infer grasps
for new, though similar, objects. Finally, in Sec. 4 we
discuss the results and draw some conclusions.
2 MATRIX DECOMPOSITION
The starting point of all decomposition approaches is
a set of L vectors x
i
∈ R
M
pooled in an input matrix
X = [x
1
, . . . , x
L
]. Each x
i
can be regarded as an ob-
servation of M random variables, comprising several
modalities. We aim for a more compact, approximate
representation of these observations using a small set
of N <ML meaningful components spanning a new
vector space F = [f
1
, . . . , f
N
]. This assumes that ob-
servations lie on a low-dimensional manifold of R
M
,
which here is approximated by a linear subspace. The
basis vectors f
i
will express typical correlations within
the training set, also including correlations between
different modalities of the data. Expressing the data
vectors x
i
with respect to the basis F yields an approx-
imation matrix, R = [r
1
, . . . , r
L
]. The N ×L matrix G
of coefficients is known as the encoding matrix.
Formally, we can restate this approach as matrix
factorization, X ≈ F ·G ≡ R, which minimizes the re-
construction error between the original data, X, and
its factorization, F · G. The computation of F and G
depends on the actual decomposition approach, which
may impose additional constraints on both matrices,
e.g., sparseness or non-negativity.
For example, PCA (Zhao et al., 2008) computes
basis vectors that are pairwise orthogonal and point in
the directions of the largest variances. k-Means clus-
tering (Li and Ding, 2006) represents observations by
585
Dornbusch D., Haschke R., Menzel S. and Wersing H. (2012).
DECOMPOSITION OF MULTIMODAL DATA FOR AFFORDANCE-BASED IDENTIFICATION OF POTENTIAL GRASPS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 585-589
DOI: 10.5220/0003790205850589
Copyright
c
SciTePress

a set of prototypes, f
i
, resulting in an extremely sparse
encoding: only the coefficient associated to the near-
est prototype equals one. Non-negative Matrix Fac-
torization (NMF) (Zhao et al., 2008) constrains basis
vectors and encodings to non-negative values to avoid
cancellations of features and facilitates their inter-
pretability. Non-negative Matrix Factorization with
Sparseness Constraints (NMF-SC) (Hoyer, 2004) is
based on NMF and additionally enforces sparseness
on the encodings and/or the basis components.
3 APPLICATION TO GRASPING
We compare the presented decomposition approaches
in a grasping scenario to investigate their ability to
find local inter-modal correlations. Based on a dataset
of successful grasps applied to a set of cups, a com-
pact set of basis components is calculated. In a sub-
sequent application step, partial observations are aug-
mented by a reconstruction of the missing modalities.
To this end, encodings are computed based on exist-
ing modalities and missing ones are predicted from
the corresponding linear combination of basis com-
ponents. Finally, the best grasp can be chosen and
realized by a robot hand.
3.1 Capturing of Grasping Data
To gather multimodal information of human grasping
processes, the Manual Interaction Lab was created at
CITEC, Bielefeld (Maycock et al., 2010). For the
work presented in this paper, data from three modal-
ities were captured: hand postures (motion-tracking
coordinates), color video images and depth images.
16 different cup-like objects were selected to record
grasping sequences belonging to three different grasp
types: cup grasped by handle, from above, or from the
side. 413 grasp configurations were captured, com-
prising 8-9 grasps per object and grasp type.
3.2 Preprocessing of Grasping Data
The captured raw sensor data was synchronized and
preprocessed to obtain suitable input data for the
grasp selection task.
Visual Modalities. The grasp for a particular ob-
ject is first and foremost determined by the shape of
the object. A preliminary study using color images
for decomposition resulted in basis components dom-
inated by colors and textures. Hence, we decided to
extract the object silhouette from these images, i.e.
those pixels constituting the object shape. We also re-
moved constant background pixels from all color and
Figure 1: Modalities: (a) Color video image. (b) Object
silhouette and contact areas. (c) Swiss Ranger depth image.
(d) Visualization of Vicon coordinates. (e) Grasp type.
depth images, replacing them with zero values. Thus,
the decomposition approaches do not need to explic-
itly model these irrelevant image parts. Contact re-
gions on the object silhouette were identified by com-
paring images before and after establishing the grasp.
All depth and color images were centered, cropped
to the foreground region, and resized for normaliza-
tion purposes. The image sizes of the sparse input
modalities were 144 × 100 for the object silhouettes
and contact regions and 61 × 46 for the depth images.
Hand Posture. Hand posture sequences, obtained
from tracking markers on all finger segments and sub-
sequent calculation of the associated hand posture
(Maycock et al., 2011), can be utilized in two man-
ners: using the whole grasping trajectory or the fi-
nal grasp posture only. In preliminary studies, we
found that complete trajectories can be reconstructed
in many cases. However, different grasping speeds
and large variations of hand trajectories prior to ac-
tual grasping sometimes lead to visible dilatation ef-
fects in the reconstructed trajectories. Dynamic Time
Warping (M
¨
uhlig et al., 2009) could compensate for
asynchronous execution speeds and might in future
work allow direct “replay” on a robot hand. In this
paper, only the final hand pose is considered, adding
a 27 × 3 dimensional vector of marker positions to the
input data.
Grasp Type. To distinguish the three employed
grasp types, we could learn three individual sets of
basis components, F
i
, employing appropriate subsets
of the training data. However, this strongly reduces
the number of data samples available for decomposi-
tion. Alternatively, a single decomposition could be
applied to the entire training set comprising all grasp
types, which often leads to an interference of basis
components corresponding to different grasp types.
In order to choose a particular grasp type, we aug-
mented all input vectors by an additional modality,
employing three-dimensional unit vectors to indicate
the grasp type. Then, we can explicitly request a par-
ticular grasp type by providing the corresponding unit
vector as an additional input to the search process.
This prevents simultaneous activation of basis com-
ponents belonging to different grasp types, thus re-
ducing co-activation of ambiguous local grasps. Fur-
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
586
(a) (b) (c) (d)
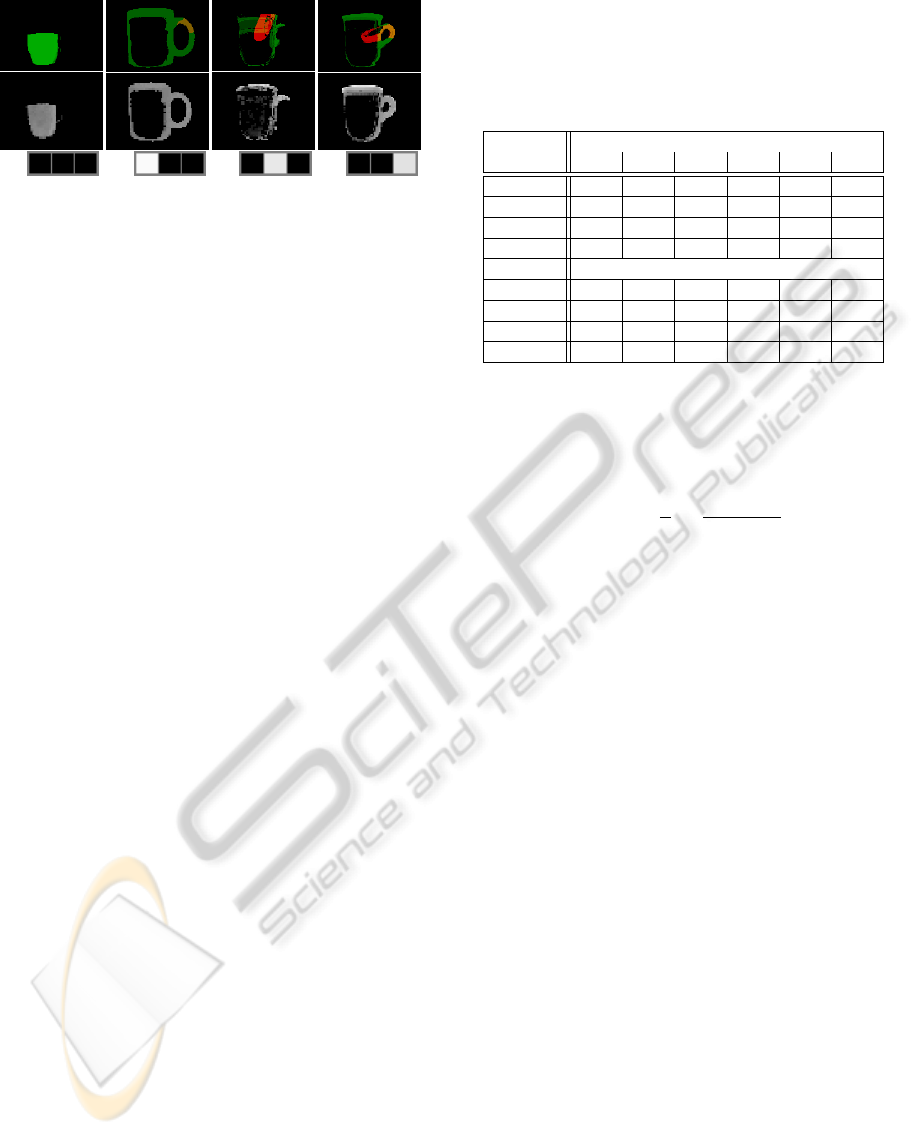
Figure 2: 4 of 250 exemplary basis components calculated
by NMF-SC. Top: overlap of object silhouettes (green) and
contact areas (red), middle: depth image, bottom: grasp
type. Grasp posture not visualized. (a) Cup corpus. (b)
Grasp by handle. (c) Grasp from above. (d) Grasp from side.
thermore, grasp-specific correlations between modal-
ities are automatically labeled by the decomposition
algorithms. Finally, the combined decomposition of
all grasp configurations has the advantage that corre-
lations, which are common to different grasp types,
have to be learned just once.
All employed input modalities are summarized in
Figure 1 along with the original color image, which
is not included in the input data. Altogether, the data
vectors comprise 14400 + 14400 + 2806 + 81 + 3 =
31690 dimensions.
3.3 Calculation of Basis Components
In the first study, we applied the decomposition algo-
rithms to a training data set consisting of 320 grasp
configurations, derived from 13 of the 16 cup-like ob-
jects. We extracted subspaces spanned by 50, 100,
150, 200, 250 and 320 basis components. Addition-
ally, we used a disjoint test data set comprising 93
grasp configurations belonging to the three remain-
ing cups to measure the ability of the methods to
generalize and represent novel, though similar, data.
In this study, the encodings used for reconstruction
were computed based on all modalities (depth images,
hand postures, object silhouettes, contact areas and
labeled grasp types). k-Means clustering produced
prototypical, holistic and non-negative basis vectors.
The encodings were maximally sparse and the abil-
ity to generalize was limited to the selection of the
nearest cluster centroid. The principal components of
PCA accomplished very small reconstruction errors,
but were difficult to interpret due to their holistic na-
ture and the occurrence of positive and negative val-
ues. The non-negative basis components produced by
NMF were mostly sparse. The encoding matrix was
always sparse and non-negative. NMF-SC computed
only sparse, non-negative basis components and en-
codings such as the sparseness constraint was explic-
itly enforced by the algorithm. Figure 2 depicts four
Table 1: Study 1 – Normalized mean squared reconstruction
errors (NMSE) for observed (a) and test data set (b) against
number of basis components. The encodings used for re-
construction are computed based on all modalities (depth
images, grasp postures, object silhouettes, contact areas and
labeled grasp types). Values scaled up by a factor of 10
3
.
Approach (a) Training Data
50 100 150 200 250 320
K-Means 75.7 49.4 31.7 18.3 10.8 0.0
PCA 39.1 20.4 11.7 6.4 2.8 0.0
NMF 52.1 31.1 20.2 12.1 7.8 2.5
NMF-SC 55.9 32.5 20.4 11.5 7.1 1.8
(b) Test Data
K-Means 163.2 167.6 165.5 176.0 174.1 179.0
PCA 91.7 80.3 74.2 70.8 68.0 65.6
NMF 107.1 97.8 94.7 95.1 94.9 98.2
NMF-SC 111.0 104.3 102.3 102.2 99.1 102.4
exemplary basis vectors, which represent local fea-
tures like the cup handle or the body. As Table 1
shows, the normalized mean squared reconstruction
error
NMSE =
1
L
L
∑
i=1
k
x
i
− r
i
k
2
k
x
i
k
2
, (1)
calculated on the training data decreases for all meth-
ods uniformly, as the number of available basis com-
ponents is increased from 50 to 320. Using the maxi-
mal number of basis components, k-Means clustering
and PCA are able to represent the training data per-
fectly. In contrast to this, for the test data set the
inverse correlation between NMSE and the feature
count did not always hold true. In particular, k-Means
did not benefit from higher numbers of basis compo-
nents. Also, NMSE increased again using the full set
of basis vectors generated by NMF and NMF-SC due
to overspecialization. Only PCA profited in all cases
as additional basis component were added.
3.4 Identification of Potential Grasps
for Novel Cup-like Objects
In the second study, we reconstructed missing modali-
ties based on the inherent correlations between the ba-
sis components’ subparts leading to the generation of
potential grasp configurations for novel, though sim-
ilar, objects. We calculated the encodings for the test
observations based only on the following modalities:
depth images (measured), object silhouettes (com-
puted from color video images) and desired grasp
types (set manually). In a second step, we utilized
these encodings to reconstruct all modalities, includ-
ing the previously neglected contact areas and grasp
postures. Since the basis vectors were specialized to
represent the correlations in grasping data, the miss-
DECOMPOSITION OF MULTIMODAL DATA FOR AFFORDANCE-BASED IDENTIFICATION OF POTENTIAL
GRASPS
587
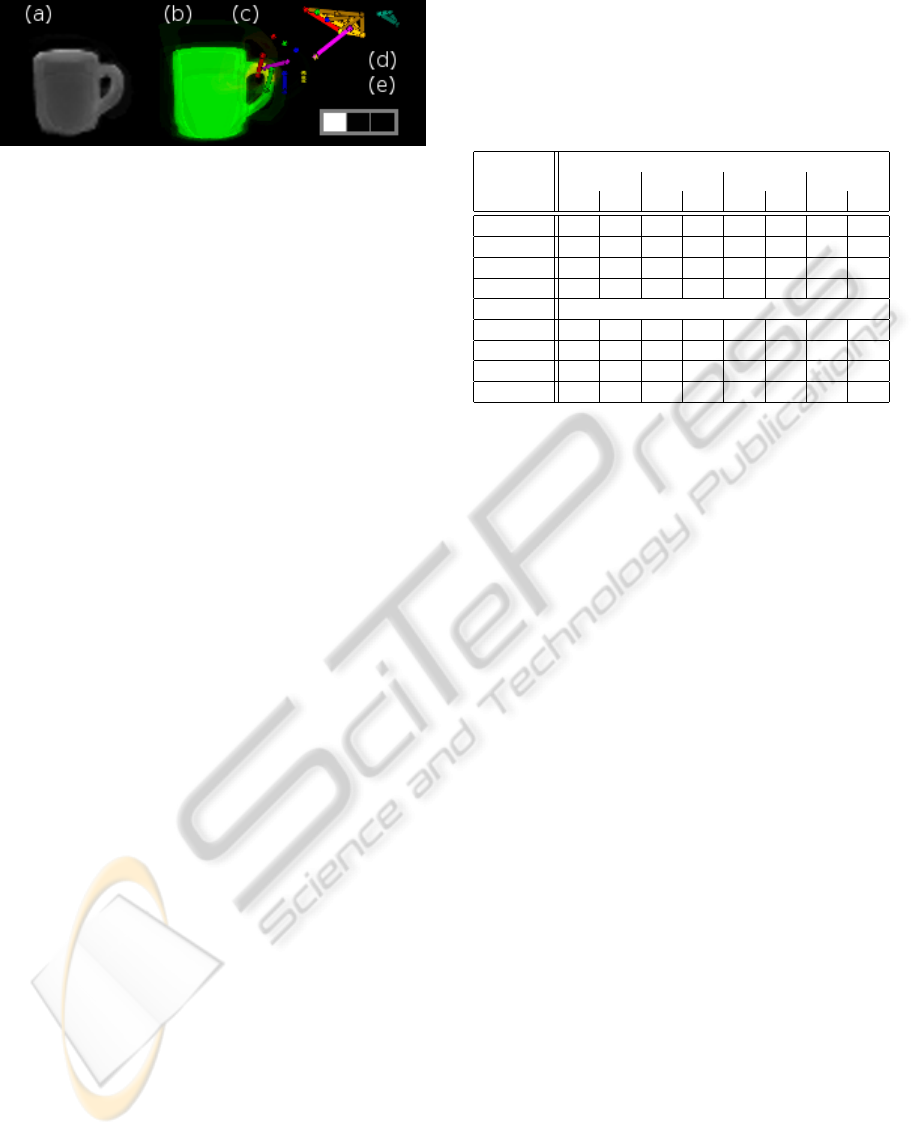
Figure 3: Potential grasp identified by NMF-SC for a new
test cup, which was not used for training: Reconstructed
depth image (a), contact area (c) and grasp posture (d) on
top of the object silhouette (b), desired grasp type (e).
ing information was approximated successfully for
most novel objects (see Figure 3). Acknowledging
the problem of overspecialization detected in the first
study, we decided to investigate only the 150 (best
error per component ratio) and 250 basis compo-
nent (best before overspecialization) cases. To ana-
lyze the reconstruction errors for the approximation of
the missing modalities, we calculated the normalized
mean squared reconstruction errors (NMSE) com-
bined for all modalities (see Table 2a) and the com-
bined NMSE only for the measured modalities (see
Table 2b). Additionally, we evaluated the reconstruc-
tions of the formerly missing contact areas and grasp
postures to assess the quality of the identified poten-
tial grasp configurations. This was done by calculat-
ing the mean contact region error E
m
(see Table 2c),
which is the average distance of the estimated and the
expected contact area centroids (averaged over all L
observations). Furthermore, we computed the mean
fingertip error E
t
(see Table 2d), which is the average
error of the estimated and the expected fingertip po-
sitions. We found that the performance of k-Means
on the test data set derogated using 250 feature vec-
tors compared to 150, but still inferred the best over-
all grasp configurations for novel objects. PCA also
produced good reconstruction errors, but sometimes
resulted in diffuse contact areas for test objects due
to its holistic basis features. NMF did not have this
problem, because of its mostly sparse basis compo-
nents. NMF-SC performed good at representing the
measured modalities and the contact areas. However,
the reconstruction error of generated grasp postures is
larger. In summary, all algorithms were able to pre-
dict realistic grasp configurations in most cases.
3.5 Selection of Best Grasp
To select the best suited grasp for a novel object, a
method has to be found in future work that is able to
sort potential grasps by their quality, e.g., by evaluat-
ing the reconstruction errors of the measured modali-
ties, or the sparseness of the inferred contact areas.
Table 2: Study 2 – modality reconstruction: Encodings are
computed based only on measured modalities and used to
reconstruct missing modalities, i.e. contact areas and grasp
postures. NMSE of (a) all and (b) measured modalities.
NMSE scaled up by a factor of 10
3
. E
m
: Mean distance of
estimated and expected contact area centroids (c). E
t
: Mean
error of estimated and expected fingertip positions (d).
Training Data
Approach (a) AM (b) MM (c) E
m
(d) E
t
150 250 150 250 150 250 150 250
K-Means 37.3 13.2 63.4 23.4 1.79 0.76 6.2 2.5
PCA 25.2 5.5 61.5 13.8 1.13 0.21 8.1 3.2
NMF 35.4 11.4 78.2 23.7 2.64 0.76 9.1 3.9
NMF-SC 25.7 8.8 48.2 17.0 1.50 0.56 13.6 4.7
Test Data
K-Means 195 228 293 354 5.3 5.8 21.8 23.1
PCA 162 158 340 337 8.7 7.8 27.3 25.5
NMF 207 161 455 309 13.2 10.2 31.6 25.9
NMF-SC 151 139 258 233 5.5 5.3 52.0 33.2
4 CONCLUSIONS
The decomposition approach provides a method to
predict missing modalities from a few measurable
modalities as long as strong correlations exist be-
tween both groups. We have shown that this approach
can be used to predict hand configurations and de-
sired contact regions for grasping an object based on
its depth image and silhouette. This grasp information
can subsequently be utilized for autonomous grasping
– either by directly actuating a robot hand towards the
estimated hand posture, or by computation of a hand
posture realizing the estimated contact locations on
the object. In both cases, an inverse hand kinematic
can be used to obtain joint angles to actually operate
the robot hand (Maycock et al., 2011).
ACKNOWLEDGEMENTS
Daniel Dornbusch gratefully acknowledges the finan-
cial support from Honda Research Institute Europe.
REFERENCES
Hoyer, P. O. (2004). Non-negative matrix factorization with
sparseness constraints. JMLR, 5:1457–1469.
Li, T. and Ding, C. (2006). The relationships among various
nonnegative matrix factorization methods for cluster-
ing. In Proc. ICDM, Washington.
Maycock, J., Dornbusch, D., Elbrechter, C., Haschke, R.,
Schack, T., and Ritter, H. J. (2010). Approaching
manual intelligence. KI - K
¨
unstliche Intelligenz, 24.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
588

Maycock, J., Steffen, J., Haschke, R., and Ritter, H. (2011).
Robust tracking of human hand postures for robot
teaching. In Proc. IROS, San Francisco.
M
¨
uhlig, M., Gienger, M., Hellbach, S., and Goerick, C.
(2009). Task-level imitation learning using variance-
based movement optimization. In Proc. ICRA. IEEE.
Zhao, L., Zhuang, G., and Xu, X. (2008). Facial expres-
sion recognition based on PCA and NMF. In Proc.
WCICA, Chongqing, China.
DECOMPOSITION OF MULTIMODAL DATA FOR AFFORDANCE-BASED IDENTIFICATION OF POTENTIAL
GRASPS
589
