
MOBILE SPEED AND POSITION SENSOR FOR HOME HEALTH
MONITORING BASED ON ACCELEROMETER SIGNALS
Tamás Dabóczi and Arnold Kalvach
Department of Measurement and Information Systems, Budapest University
of Technology and Economics, Budapest, Hungary
Keywords: Sensor signal processing, Sensor fusion, Home health monitoring.
Abstract: This paper presents a study how accelerometer sensors can be used to estimate speed and position by
integrating the sensor signals once and twice, respectively. Unfortunately, integration emphasises bias and
noise of the sensor. We developed a heuristic nonlinear filter which efficiently suppresses unwanted effects,
assuming human movement. Our aim is to provide a mobile sensor to detect the movement of elderly people
suffering from dementia, for home health monitoring purposes. Utilising this sensor together with others
allows us to detect unusual behaviour of the patient. The two accelerometer signals together with the
suggested heuristic nonlinear filtering allows us to reliable measure the speed, and reconstruct the shape of
the movement trajectory of the patient.
1 INTRODUCTION
There are many applications which require speed
and position measurement of an object with cheap
and mobile sensors, which do not obstruct the
movement. Our aim is to find an appropriate device
for home health monitoring, i.e. to track the
movement of elderly people in their home, suffering
from dementia. This, together with other sensors in
the home might be used to detect unusual behaviour
of the patient, and to warn the relatives or the
nurse/doctor. There are several types of information
which might be useful for this purpose. This
includes the current position of the patient in his/her
home (which room, which part of the room), speed
of the movement, acceleration (e.g. detecting a fall).
Even the shape of the trajectory of the movement is
useful information to detect whether the patient is
moving intentionally into a specific direction or
nervously perambulates, walks back and forth, or
circulates in the room.
One possibility to extract many of the above
features is to install cameras in every room of the
house. If two cameras per room are installed, even
precise 3 dimensional position reconstruction is
possible (Hartley and Zissermann, 2006), although
the image processing is not trivial (face recognition,
cloaking, more people in the room etc.). This
solution has the drawbacks that installation demand
and costs are high, and people are very much
dismissive about being watched, even if the image
itself is not viewed by others, only certain
characteristic parameters are extracted from the
images. Moreover, reliable information can be
retrieved only under certain lighting conditions. If
the room is not lit, e.g. at night, cameras cannot be
used.
Another possibility to detect position is to use
passive infra movement sensors in every room
(Scanaill et al., 2006). If more sensors are installed
in one room (e.g. into the four upper corners of
walls) not only a binary signal is provided (someone
resides in the room or not), but also the section
within the room can be detected. However, this is
still a very rough detection of the position, no other
information can be extracted from the measurement
and requires many wiring in the house, which might
bother the patient.
RFID is also a good idea (Mateska et al. 2011).
However, the range of the detection of RFID tags is
limited, thus many RFID readers have to be
installed, which increases the installation time and
cost, and the room would be full of wires. This
approach aims to detect only the position.
In this research we investigated the possibilities
of utilising accelerometer sensors to measure the
acceleration, and estimate the speed and position by
integrating the signals. The idea is to put the tiny
accelerometer into regularly worn clothes or even
350
Dabóczi T. and Kalvach A..
MOBILE SPEED AND POSITION SENSOR FOR HOME HEALTH MONITORING BASED ON ACCELEROMETER SIGNALS.
DOI: 10.5220/0003790603500354
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2012), pages 350-354
ISBN: 978-989-8425-91-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

better into the slipper. The collected signal can be
occasionally transmitted by wireless sensor network
to a gateway, to spare battery life. With this
approach we aim to provide information about the
acceleration and speed of the patient, and about the
shape of the trajectory of the movement. Precise
position estimation seemed to be impossible after
double integration; however, the shape of the
movement is reliable reconstructed. Integration
emphasises the bias and noise of the measurement
more and more as the time goes. With double
integration the effect is even stronger. Pure double
integration provides useless estimate. We developed
a nonlinear heuristic filter, which takes into account
that human movement has certain behaviours
(limited speed, acceleration, many times in still etc.).
2 DISTURBING EFFECTS
The speed and position information can be
reconstructed from the acceleration by integrating
the signal once and twice.
∫
= dttav )( ,
∫∫
= dtdttax )( ,
(1)
where x denotes the position, v denotes speed, a
denotes the acceleration and t stands for time. Since
the three dimensions in the space are independent,
position in the 2 or 3D space can be reconstructed by
independently integrating the different (orthogonal)
components. If the acceleration signal is available as
sampled data, we can estimate the integral by simple
accumulation of the samples:
[] []
[
][]
∑∑∑
Δ=Δ= iatixiativ
2
,
,
(2)
where [i] stands for the sampled version of the
corresponding signal and
tΔ denotes sampling
time. Here we assume equidistant sampling.
However, if the accelerometer sensor is not
perfect, we will integrate all biases and disturbances
also. We need to face offset error, gain error, offset
drift, wideband electric noise and quantization noise.
[] []
(
)
∑∑
+⋅Δ= eiaGtix
2
ˆ
,
(3)
where G denotes gain error and e stands for all offset
like errors, including wide band electric and
quantization noise.
Offset-, gain error, offset drift and wideband
electric noise are caused by the sensor itself, while
quantization noise is produced by the AD converter.
We could model other disturbances of the AD
converter also, like e.g. integral nonlinearity,
however, using a small resolution ADC (8..10 bits)
these disturbances can be neglected compared to the
others. A short measurement of one of the two
independent 3D accelerometers is shown in Fig. 1.,
having still sensors. It can be observed that there is
quite a large noise on the signals. The two sensors –
each having 3 axes – have slightly different offset
and gain errors. The channel, showing around 9 m/s
2
corresponds approximately to the direction of the
gravity. (Sensors were not precisely positioned to
align with the horizontal and vertical directions.)
0 200 400 600 800 1000 1200 1400 1600
-12
-10
-8
-6
-4
-2
0
2
samples
a [m/sec
2
]
x
y
z
Figure 1: 3D accelerometer signals in still position.
We observed that offset error is always present,
and is characteristic to a particular sensor. Thus, we
can compensate for them after a short calibration
procedure. Unfortunately, offset error changes with
the temperature, thus a one time calibration remains
valid only until the temperature does not change
significantly. In our application we can assume that
room temperature does not change abruptly and
much, thus we do not compensate the sensor signal
for offset drift. Gain error can be compensated
utilizing offline calibration measurements.
Wide band electric noise and quantization noise
can be treated together. They all have the following
properties: they have a symmetric probability
density function with zero mean value, and they
have a wide and approximately white spectral
distribution. After integrating the acceleration signal
the variance of the speed estimate increases with the
square of time. After double integration the variance
of the position estimate is increased already with the
fourth power of time. Fig. 2 shows the first and
second integral of a Gaussian noise having
symmetric probability density function with zero
mean value.
In the remaining we will focus on compensating
the effect of the offset error and the noise.
MOBILE SPEED AND POSITION SENSOR FOR HOME HEALTH MONITORING BASED ON ACCELEROMETER
SIGNALS
351

Figure 2: First- (middle figure) and second integral (lower
figure) of a Gaussian noise (upper figure).
3 HARDWARE SETUP OF THE
EXPERIMENT
In order to verify the behaviour of our position esti-
mator we set up a sensor system. Our department
developed a modular platform for embedded sys-
tems (Tóth et. al, 2005), which we used as a rapid
prototyping device. We integrated two accelerome-
ters to the 8 bit microcontroller system, each having
a
± 3g range in all 3 axes. This range seemed to
cover all acceleration resulted from the movement of
an elderly man/woman, taking into account that
gravity adds to the signal in one direction. The sen-
sor has a proportional analog output, thus we need a
6 channel AD converter to digitize the signals. The
ATMega128 microcontroller of the rapid prototyp-
ing system has a built in ADC, with 10 bits resolu-
tion. The sampling frequency is set to 162 Hz
(corresponding to ~6 msec sampling period for each
channel). The sampled acceleration signals can be
retrieved from the embedded system either through
wired serial port, or wireless link in the ISM
frequency band (433 MHz).
4 SPEED AND POSITION
ESTIMATION
The speed signal can be calculated from the
acceleration signal by means of integration, while
position with double integration. As we concluded in
the first section we can focus on offset error and
noises as the main disturbing effects of the
integration. First we will assume that the movement
is in a horizontal plane, and the sensor itself does not
rotate. Later in Section 5 and 6 we will investigate
the effect of the rotation and the gravity.
The offset error can theoretically be removed by
suppressing the DC component. Real time
suppression of the DC component with a very
narrow suppression band highpass filter would
require long FIR filter, which means on one hand a
large delay, on the other hand very large
computation demand. Here we were satisfied with
offline computation of a larger data set, carried out
in a PC, where data was collected regularly from the
embedded sensor system. In that case the constant
offset throughout the dataset was considered the
mean value of the record, which was removed from
the acceleration signals (each channel separately).
The noise can be handled in several ways. We
implemented two accelerometers, which provide
measurements from the same movement with
uncorrelated noise, and independent disturbances
(offset error, bias etc.). Our first attempt to reduce
the effect of the noise is to average the
corresponding channels of the two sensors. Cross
correlation of the same channel of the two sensors
proves that the noise can be treated as uncorrelated.
The noise variance is thus reduced.
The second attempt to reduce the effect of the
noise is an appropriate filtering. Human movement
has certain bandwidth. Thus, filtering out
components that are out of the supposed bands
reduces the noise variance. We tried to filter the
speed signal. Our concept is that human movement
has the characteristics that speed is zero in most of
the time. A very low speed motion is not realistic; it
will be handled as cause of error of integration.
Thus, we need to observe the baseline shift of the
speed signal, and compensate the speed
measurement for that.
4.1 Linear and Order Statistic Filtering
As the baseline we want to estimate has very low
frequency components first we applied a narrow-
band linear lowpass filter. However, this filtering
brought no satisfactory results. It is hard to sharply
separate the baseline and human movement. We
skipped this possibility.
Our second attempt to filter the speed signal was
an order statistic, nonlinear filter, namely the median
filter. It has the advantage that impulse like noises
can be efficiently removed. In that context short
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
352
movements will be treated as “impulses”, and we
assume that the patient remains still most of the
time. The window size of the median filter needs to
be fitted to the possible length of the duration of the
movements (couple of seconds). This solution has
much better performance than linear filtering,
however, still not good enough.
400 600 800 1000 1200 1400
-0.06
-0.04
-0.02
0
0.02
0.04
samples
v [m/sec]
v ori ginal
v with noise
v baseli ne
Figure 3: Baseline removal of the speed signal by means
of median filter.
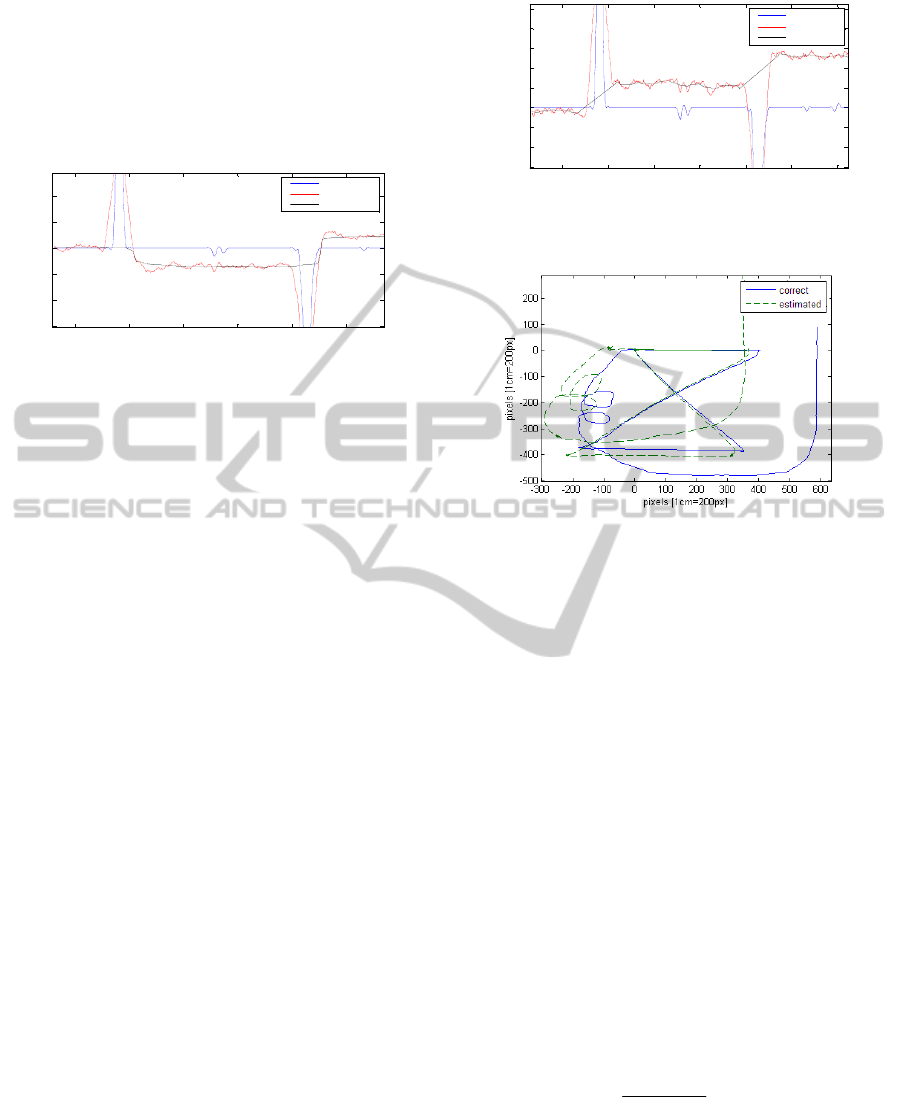
4.2 Heuristic Nonlinear Filtering
We propose to use a heuristic nonlinear filter. The
main principle of the filter is that we are looking for
long parts of the signal which have nearly constant
speed. These parts will be considered as zero-speed
parts, and the deviation will be treated as
disturbance. Between the constant speed parts the
baseline will be linearly interpolated. This method
has the advantage over median filtering that we get
an acceptable estimate for the baseline even during
the movement, and the baseline estimate will be a
continual function.
Fig. 4 shows a simulation result with the
proposed filter. Recording the movement of the PC
mouse carried out the reference measurement. We
distorted this signal synthetically and added noise to
simulate the real environment. Position is
reconstructed with double integration after filtering
the speed signal. It can be observed that fractional
movements are much better reconstructed than
continuous one (Fig. 5). The shape of the trajectory
of the movement is reliable reconstructed, while the
2D position information is distorted after double
integration.
5 CORRECTION OF SENSOR
ROTATION
In the previous section we assumed a horizontal
movement, where the coordinate system of the
world and the sensor are aligned. If the sensor itself
rotates, this assumption is not valid any more. We
need to detect this situation and correct the signals
appropriately.
400 600 800 1000 1200 1400 1600
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
samples
v [m/sec]
v origi nal
v with noise
v baseli ne
Figure 4: Baseline removal of the speed signal by means
of the proposed heuristic filter.
Figure 5: Position estimation in 2 dimensions.
We can make use of the fact that we have two
sensors of the same type. If there is no rotation, the
two sensors measure the same acceleration, apart
from bias and noise. If the sensors are rotated, there
will be a difference in the accelerations. Averaging
the two signals reduces the noise and provides an
acceleration estimate for the point in-between the
two sensors, and cancelling the effect of rotation.
Thus, we can separate acceleration and angular
acceleration.
Averaged signals depend only on acceleration,
while the difference of the two sensors depends only
on the angular acceleration, assuming that the axes
of the two sensors are aligned well enough. In this
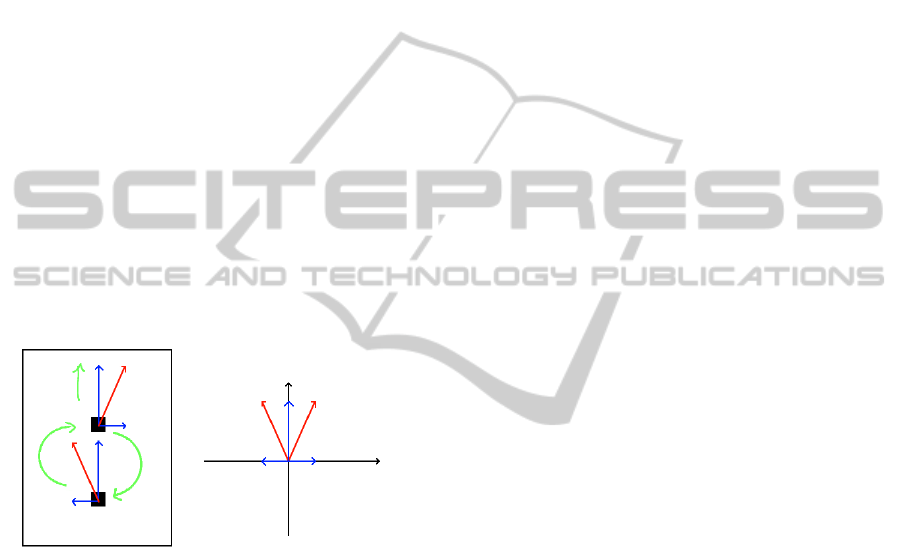
case if the sensors are rotated with β angular
acceleration around the point halfway between the
two sensors, both sensors will measure an additional
acceleration component, perpendicular to the axes
connecting the sensors (Fig. 6.).
The angular acceleration can be calculated from
the two measurements as follows:
r
aa
yy
2
ˆ
21
−
=
β
,
(4)
where
β
ˆ
denotes the estimate of the angular
acceleration, a
1y
and a
2y
are the acceleration
components perpendicular to the axes connecting the
sensors, and r denotes the radius of rotation (half of
the distance between the sensors). After
MOBILE SPEED AND POSITION SENSOR FOR HOME HEALTH MONITORING BASED ON ACCELEROMETER
SIGNALS
353
compensating with this component we can use the
former methods to integrate the signals.
The accuracy can be increased by a stronger
lowpass filtering of the angular acceleration signal,
since it can be assumed that angular acceleration has
a very low frequency.
In a non-ideal case the two sensors cannot be
perfectly aligned in the space on the printed circuit
board, thus, there will be a mismatch in the direction
of the axes. This results a difference in the
acceleration signals of the two sensors even without
rotation. The observed “false” angular acceleration
depends on the acceleration and the angle between
the axes of the two sensors. The angle mismatch is
distorted by a trigonometric function (sin(x)). For
small angles the sine function might be
approximated by its argument. The angle mismatch
should be determined based on offline calibration
measurements. This should be done only once, after
the soldering of the sensor. However, knowing this
component means that the measured acceleration
needs to be compensated regularly with
x
a)sin(
ϕ
.
Please note that in this case the axis x is the
“average” of the two axes of sensors.
Figure 6: Effect of the rotation of the sensors, together
with acceleration.
6 EFFECT OF GRAVITY
In the former sections we neglected the effect of
gravity as we assumed a horizontal motion. In the
case the sensors are not constantly moving in hori-
zontal plane, the gravity adds an extra acceleration
to the sensor signals. Fortunately these additional
accelerations are constant while the sensors are not
moving. The heuristic filter – which we have applied
on the speed signal – is designed for this case. Thus,
applying the same heuristic filter on the acceleration
signal can cancel the effect of gravity.
We can improve the gravity cancellation by us-
ing the rotation estimation. If we apply 3D acceler-
ometers, we can calculate a 3 dimensional rotation
and so the direction of gravity. After this the gravity
components can be subtracted from the signals. In
order to make a good gravity cancellation, the two
methods should be applied together.
7 CONCLUSIONS
In this paper we investigated the use of two
accelerometers to measure the acceleration and
estimate the speed and position of elderly people
suffering from dementia, for home health monitoring
purposes.
We developed a heuristic filter to suppress the
measurement disturbances, which would make the
estimate impossible because of the integration of the
raw signal data. We also developed an algorithm to
detect and correct for the rotation of the sensors.
Fabrication or installation mismatch of the axes of
acceleration sensors can also cause problem, for
which we developed also a compensation method.
Simulation and measurement experiments show
that speed estimate is quite reliable based on one
time integration, after utilising the proposed
heuristic nonlinear filter. Precise position estimate
not possible, however, in the case of fractal
movement the shape of the trajectory can be well
reconstructed, which is a useful information about
the patient.
ACKNOWLEDGEMENTS
This work has been supported by BelAmi and
Hungarian Scientific Research Fund (OTKA), grant
number TS-73496. Support of Bolyai János
Scholarship is also acknowledged.
REFERENCES
Hartley, R., Zissermann, A., 2006. Multiple View
Geometry in Computer Vision, Cambridge University
Press, second edition.
Tóth Cs, Simon Gy, Dabóczi T, Scherer B, Kádár L, Samu
G, Benesóczky Z, Péceli G, 2005. A modular Platform
for Embedded Information Technology. Proceedings
of DDECS: 8th IEEE Workshop on Design and Dia-
gnostics of Electronic Circuits and Systems. Sopron,
Hungary, 2005. April 13-16. pp. 198-201.
Scanaill, C. N., Carew, S., Barralon, P., Noury, N., Lyons,
D. and Lyons, G. M., 2006. A Review of Approaches
to Mobility Telemonitoring of the Elderly in Their
Living Environment, Annals of Biomedical Enginee-
ring, Volume 34, Number 4, pp. 547-563.
Mateska, A.; Pavloski, M.; Gavrilovska, L.; 2011, RFID
and Sensors Enabled In-Home Elderly Care, MIPRO
Conference 2011, May 23-27, 2011, Opatija, Croatia,
pp. 285-290.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
354
