
FACE AND EYE TRACKING FOR PARAMETERIZATION OF
COCHLEAR IMPLANTS
M. Cabeleira
1a
, S. Ferreira
1b
, L. F. Silva
2
, C. Correia
1
and J. Cardoso
1
1
Instrumentation Center, Physics Department, University of Coimbra, R. Larga, Coimbra, Portugal
2
Servic¸o de Otorrinolaringologia do Centro Hospitalar de Coimbra - (CHC), Coimbra, Portugal
Keywords:
Cochlear Implants, Eye-tacking, Colour based Trackers, Viola & Jones Face Tracker, Between-the-Eyes,
Gabor Filter.
Abstract:
This work presents a free head eye-tracking solution created for use as a complementary tool in the parame-
terization of cochlear implants. Nowadays, the parameterization of these implants is a long and cumbersome
process performed by audiologists and speech therapists that throughout many periodic evaluations where
audiometric tests and electrode adjustments are performed. The eye tracking system will assist this process
through detection of saccades generated when a subject hears sounds produced during the audiometric test
procedure. The main purpose is to ease and improve the implant re-parameterization procedure with uncoop-
erative subjects, like children. The developed system is composed of three digital video cameras where two
of the cameras are responsible of the detection of the position of the face and eyes and the third is responsible
of the gaze detection. The developed face and eye detectors are also compared in order to choose the best
combination of algorithms to perform robust eye detection with unpredictable subjects. The best combination
of algorithms is the Viola-Jones face detector combined with an eye detector Ring Gabor filters, that correctly
detected the eye-position in 76,81% of the tested videos at 18 frames per second.
1 INTRODUCTION
Cochlear implants are used in cases of profound or to-
tal deafness to restore hearing capabilities. An early
implementation, particularly in children younger than
three years old, allows for the exposition to sound
stimuli which is essential for the development of
speech and the articulation of language. A cochlear
implant is composed by a microphone, a speech pro-
cessor and a set of surgically implanted electrodes in-
side the cochlea, that stimulate the vestibulocochlear
nerve responsible for hearing. After the surgery, the
patient must undergo an extensive electrode parame-
terization procedure to achieve optimal hearing capa-
bilities, in a procedure strongly dependent on the ex-
pertise of audiologists and speech therapists. Many
periodic audiometric evaluations are performed to
fine tune each electrode’s gain. This slow and subjec-
tive task becomes even more complex when applied
to children under twelve. Thus, innovative and objec-
tive implant parameterization techniques capable of
minimizing technician’s errors and allow faster and
reliable procedures are mandatory (Porter, 2003).
A possible solution makes use of eye-tracking
techniques, as a complement of the existing proto-
col, to determine the gaze point whenever a sound is
heard. The system must be non-invasive, comfortable
and easy to use. The proposed eye-tracking system
should robustly detect and track the face region after
a simple calibration procedure, as well as detect the
gaze vector (even when contact is lost and without be-
ing recalibrated) at around 50 frames per second (i.e.
time resolution should reach 20 ms).
The eye-tracking DAQ module is composed by
two webcams and one high resolution (HR) digital
camera. The webcams are for face and eyes detec-
tion along with distance assessment, while the digital
HR camera is used to acquire the eye ROIs. The 3
camera solution minimizes processing time and low-
ers overall costs.
The purpose of this work is to select the best set of
algorithms for face and eye detection. To perform the
face detection, colour based algorithms were tested
against feature based algorithms for robustness, de-
tection accuracy and processing time. Similarly, eye
detection is accomplished both by morphological fea-
429
Cabeleira M., Ferreira S., F. Silva L., Correia C. and Cardoso J..
FACE AND EYE TRACKING FOR PARAMETERIZATION OF COCHLEAR IMPLANTS.
DOI: 10.5220/0003792604290433
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2012), pages 429-433
ISBN: 978-989-8425-89-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

tures extraction (’between the eyes’) and Gabor filter-
ing.(Zhao, 2003)
2 ALGORITHMS
A visual representation of the algorithms used is pre-
sented in Figure 1
Figure 1: Schematic representation of the Face and Eye de-
tection algorithms. (1) lighter version of the Viola-Jones
algorithm, (2) Image of the Mahalanobis Distance opera-
tion, (3) Image of the Red-Green operation, (4) Bounding
Box Selection, (5) Image binarization, (6) Bounding Box
generation, (7) Image resultant from the Elliptical Gabor
Filter, (8) Eroded image and vertical gradient image of the
face, (9) Eyes marked using information obtained with the
Elliptical Gabor filter, (10) Between the eyes point marked.
2.1 Face Detection and Tracking
For head or face analysis, three algorithms were stud-
ied: Red-Green (RG), Mahalanobis Distance (MD)
and Viola-Jones (VJ). The first two algorithms are
based on skin colour properties and the last algorithm
is focused on facial features.
2.1.1 Red-Green
This algorithm was firstly developed by Saleh Al-
Shehri and is the simplest amongst all the algorithms
tested in this work. It uses images acquired in the
RGB format and takes advantage of two basic prin-
ciples; the red component is predominant in human
skin and the R/G ratio is bigger than 1. Therefore
if we subtract the green component to the red com-
ponent, skin pixels will acquire values higher than 0
(Al-Shehri, 2004).
Non-skin pixels with values much higher than 0
can also appear and must be eliminated. This was
accomplished by defining a window of values that are
considered skin colour. The lower threshold used was
the value 0.02 and the higher was 0.25 (considering a
gray-scale ranging from -1 to 1).
This method excludes parts of the face like eyes
and beard, therefore a closing operator was used to
connect all the detected points in the face before cal-
culating the Bounding Box (BBox) around the face.
In order to counter several miscalculations where the
generated BBox included the neck and clothes, a se-
lection method was implemented. This method ad-
justs the BBox taking as premise that the face is lo-
cated on the top of the body and in between of the
shoulders.
2.1.2 Mahalanobis Distance (MD)
The MD allows the computation of the relative dis-
tance, or similitude, between each element of un-
known data sets to known ones, being this distance
measurement widely used in the segmentation of skin
colours (Supriya, 2010). The colour space used for
this algorithm was theYC
B
C
R
and it measures the MD
between the colour components C
B
and C
R
present
in the picture and the average skin colour compo-
nents defined by the author as being 107.9649 for the
C
B
component and 140.8913 for the C
R
component.
The equations implemented for this algorithm may be
found in (Maesschalck, 2000). The covariance matrix
(C
−1
x
) used was:
C
−1
x
=
1.8328501× 10
3
2.2506719× 10
3
2.2506719× 10
3
6.8658257× 10
3
(1)
These values were obtained by the author by us-
ing a wide number of images containing skin colour
samples.
2.1.3 Viola-Jones (VJ)
This method was developed by Paul Viola and
Michael Jones and it differs from the previous two
because instead of using pixel colour information in
order to locate the face in an image, this algorithm
applies Haar-like features to the image through vari-
ous stages of a previously trained classifier. A more
in depth explanation of the algorithm may be found in
the literature (Viola, 2001).
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
430

In this work the algorithm used was developed by
Dirk-Jan Kroon (Mathworks, 2011), it consists of a
previously trained classifier cascade with 22 stages of
classification and spanned the images 11 times at dif-
ferent scales. To overcome processing time require-
ments, only the first two frames of the video used the
original algorithm. The role of these two frames was
to define the scale at which the face and its initial po-
sition in the image. That information was then used in
the subsequent images where a lighter version of the
algorithm was applied. This version used only a sub-
window of the original image centred in the position
detected in the previous frame and spanned this sub-
window only in the scale defined in the initial frames,
the classifier cascade was also simplified using only
the first 5 stages. As a result of this simplification,
the algorithm performed a lot faster not without losing
some of its specificity generating lots of BBox around
the real face. To select the correct BBox, the image
was binarized using a threshold of 0.45 to 0.6 high-
lighting the darker pixels. The BBox with the more
dark pixels was the one used and the sub-window was
cropped and forced to become a 50x50 picture for fur-
ther analysis.
2.2 Eye Detection
To locate the eyes in the previously detected face, two
methods were studied: Between the Eyes (BTE) and
Elliptical Gabor Filter (EGF).
2.2.1 Between-the-Eyes (BTE)
This algorithm was developed having as reference the
work done by Peng et al. (Peng, 2005). This algo-
rithm takes advantage of the unique illumination pro-
file of a face and extracts the point that lies in between
of the eyes. It works in two fundamental steps. The
first consists in computing the vertical gradient im-
age of the face to detect the increased shadow present
in the transition between the forehead and the eye-
brow region, to do this a horizontal cumulative sum
is performed and the line of pixels with higher value
is considered as the horizontal coordinate of the BTE
point. A sub-window of the original greyscale image,
centred in this line is then extracted and eroded by a
circular operator with 4 pixels in diameter. Vertical
cumulative sum is performed and again the column
with higher value is considered the vertical coordinate
of the point.
2.2.2 Gabor Elliptical Filter (GEF)
The Gabor filter used to detect the eyes was based on
the work done by Yanfang Zhang, it consists in the
use of an elliptical Gabor filter that is a 2-D band pass
filter generated by a Gaussian function modulated by
a sine function. The equation and pictures of the filter
are also presented in his work (Zhang, 2005). In this
work, the parameters used to compute the filter were
σ
x
= 15, σ
y
= 15, F=64, θ = 0 and the filter size was
15x15. Here σ
x
and σ
y
stand for variances or scale
factors along x and y axis, F for spatial central fre-
quency and θ for the rotation angle of the filter. The
real part of the filter was selected and normalized for
further use. The computed filter was then convolved
with the gray-scale face image to highlight the eyes
position. The eye region appeared in the image as
holes, therefore to select the eye regions the picture
was binarized highlighting the darkest regions. The
centroid position of these regions was then used to
mark the position of the eyes.
3 TEST SETUP
In order to compare the effectiveness of the devel-
oped algorithms, a video database was created. This
database encompassed 6 types of videos of 23 differ-
ent subjects performing different head movements on
each video. The protocol for each video is presented
in Table 1. The subjects used for this database were
all voluntary members found in the investigation cen-
tre.
Table 1: Description of the head movement performed on
each video.
Video Subject’s movement description
I Upright position at rest
II Approach the camera and stray away
III Laterally tilt the head
IV Tilt the head
V Pan the head
VI Free head movement
The videos were acquired using a Logitech C210
USB webcam at 30 frames/s and with a length of 10s
with a resolution of 120x160. The recorded videos
were then processed in Simulink where each video
was run 6 times covering all possible combinations
of face detector and eye detectors. All videos were
processed in offline using a Intel Core 2 Duo CPU
E6750 @ 2.66 GHz computer (RAM 2GB and 64-bit
Operating System).
To evaluate the results in the terms of accuracy
a score scale with three steps was created: the score
”0” was attributed to algorithms that failed to detect
the correct face or eye position, ”1” was attributed
FACE AND EYE TRACKING FOR PARAMETERIZATION OF COCHLEAR IMPLANTS
431
to algorithms that can detect the face or eyes posi-
tion with minor errors and ”2” was attributed to al-
gorithms that can correctly detect the face or eye po-
sition. The time performance of each algorithm was
also measured (maximum frame rate).
4 RESULTS & DISCUSSION
The results for the time performance tests performed
on each combination of algorithms is presented in Ta-
ble 2.
Table 2: Results for the time performance tests.
Eye detection Face detection Average frames /s
BTE
R-G 43
MD 37
VJ 23
EGF
R-G 62
MD 34
VJ 18
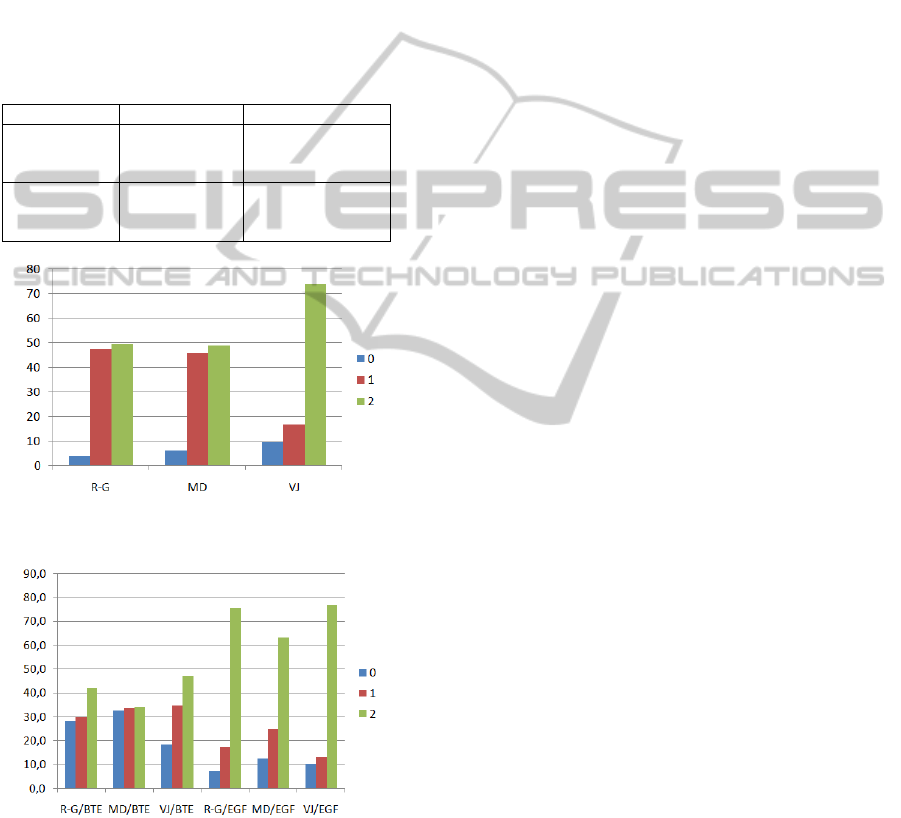
Figure 2: Graphic representation of the results obtained for
the totals of each face detectors.
Figure 3: Graphic representation of the results obtained for
the totals of each eye detectors.
As expected, the face detector algorithm that per-
formed better in terms of processing time was the R-
G, reaching an average value of 62 fps when used with
the EGF. With this processing speed it should be pos-
sible to detect a saccade movement at its lower tim-
ing threshold. The VJ and the MD still need several
performance improvements because, to detect a sac-
cade movement, frame rates higher than 50 frames/s
are mandatory. By analysing the results relative to
the eye detectors, the EGF operated faster when com-
bined with the R-G and slower in the other two. The
exact opposite occurred with the BTE.
As can be observed in Figure 2 the results of the
two colour based algorithms show similar tendencies
being capable of correctly detect a face in roughly
50% of the cases. In the other cases the face was usu-
ally detected in some point, but with positional errors
or with inconstant detections. The algorithm that per-
formed the best was the VJ, being capable of correctly
detecting the face in 73.91% of the studied videos.
When analysing the accuracy of the face detectors,
present in Table 3, it is evident that the colour based
detectors are quite robust to the head movements, be-
cause they generate similar results on each type of
movement. The erroneous face detection in these al-
gorithms can be explained by illumination problems
and skin-like objects present in the image that can
mislead the algorithms. On the other side the VJ is
more sensible to some of the head movements than
to others, in particular movements that involve face
scale variations mainly because, the BBox generated
always have the same size.
To improvethe accuracy of the eye detection algo-
rithms, in case a face was not detected at all, the score
given to the eye algorithm was also 0. As can be seen
in Table 4, the EGF exhibits better eye detection re-
sults than the BTE, being able of outputting correct
eye positions even when the face was segmented with
errors. For this reason the EGF can compensate for
the errors inherited from the face detectors and gener-
ate better results. The BTE exhibited poor eye detec-
tion results, even when it was applied to a well seg-
mented face by the VJ in ideal conditions like in video
I where the face was impeccably segmented.
The table also reveal the superior accuracy of the
R-G when compared to the other colour based algo-
rithm. In video III all the combinations of algorithms
output worse results, being considered the most dif-
ficult head movement to track. In Figure 3 can be
observed that the most accurate combination of algo-
rithms to extract eye positions is the VJ and the EGF
having detected the correct eye position in 76.81% of
the cases. The results for the combination of R-G and
EGF were also very appealing, being capable of de-
tecting the correct eye position in 75.36% of cases.
The percentage of erroneous detections was 17.39%,
which was higher than the 13.04% obtained by the VJ
and the EGF. In spite of this apparent superiority, the
percentage of non-detections was higher with the VJ
and the EGF.
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
432

Table 3: Results for the face detectors accuracy.
Face Videos
Detection I II III IV V VI
Method
0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2
R-G
8.7 47.8 43.5 0 39.1 60.9 4.3 56.5 39.1 4.3 47.8 47.8 4.3 47.8 47.8 0 43.5 56.5
MD
8.7 43.5 47.8 0 43.5 56.5 8.7 60.9 30.4 8.7 56.5 34.8 8.7 30.4 60.8 0 39.1 60.9
VJ
13.0 0 86.9 4.3 34.8 60.9 4.3 21.7 73.9 13.0 13.0 73.9 13.0 4.3 82.6 8.7 26.1 65.2
Table 4: Results for the face and eye detectors accuracy.
Eye Face Videos
Detection Detection I II III IV V VI
Method Method
0 1 2 0 1 2 0 1 2 0 1 2 0 1 2 0 1 2
BTE
R-G
30.4 17.4 52.2 17.4 17.4 65.2 39.1 43.5 17.4 30.4 17.4 52.2 30.4 34.8 34.8 21.7 47.8 30.4
MD
30.4 26.1 43.5 21.7 34.8 43.5 39.1 34.8 26.1 30.4 39.1 30.4 43.5 21.7 34.8 30.4 43.5 26.1
VJ
17.4 34.8 47.8 13.0 43.5 43.5 26.1 30.4 43.5 17.4 26.1 56.5 17.4 30.4 52.2 17.4 43.5 39.1
EGF
R-G
13.0 8.7 78.3 4.3 34.8 60.9 8.9 26.1 65.2 8.7 4.3 86.9 4.3 13.0 82.6 4.3 17.4 78.3
MD
17.4 4.3 78.3 8.7 34.8 56.5 13.0 43.5 43.5 13.0 4.3 82.6 13.0 21.7 65.2 8.7 39.1 52.2
VJ
13.0 0.0 86.9 4.3 17.4 78.3 4.3 26.1 69.6 13.0 13.0 73.9 13.1 8.7 78.3 13.0 13.0 73.9
5 CONCLUSIONS AND FUTURE
WORK
Both the R-G and VJ performed well in the tests. Al-
though the VJ has a higher percentage of correct de-
tections than the R-G, it requires a much longer pro-
cessing time. The best eye detector is the EGF there-
fore the best possible combinations are the R-G with
EGF or the VJ with the EGF. The colour based algo-
rithms are not robust enough to the task of detecting
faces, but could be used as a first step of image pro-
cessing in order to isolate regions where a face could
be present in order to diminish the processing time
required by the VJ to segment the face.
In the future the face detectors and the eye detec-
tors will be improved in terms of processing time and
accuracy and will be implemented in C++ using the
OpenCv library. The cameras used to acquire the im-
age will also be improved to cameras capable of ac-
quiring images at frame rates of the order of the 50-60
frames per second in order to be able to detect a sac-
cade.
The project will enter in a second phase where al-
gorithms of stereo vision will be implemented in or-
der to calculate the distance between the head and
the system, in order to estimate the head pose and
to estimate the position of the eye under study in the
third camera. Eye processing techniques will also be
implemented in order to estimate the gaze point and
complete in this way the eye tracking system.
ACKNOWLEDGEMENTS
We would like to thank Fundac¸
˜
ao para a Ci
ˆ
encia e a
Tecnologia (FCT) for the financial support of this
project (PTDC/SAU-BEB/100866/2008). We would
also like to thank the collaboration of the patients
and their families and for all support received from
Servic¸o de Otorrinolaringologia do Centro Hospita-
lar de Coimbra (CHC).
REFERENCES
Al-Shehri, S. (2004). A simple and novel method for skin
detection and face locating and tracking. Lecture
Notes in Computer Science, Volume 3101/2004, 1-8.
Maesschalck, R. (2000). The Mahalanobis distance. Else-
vier Science B.V., Chemometrics and Intelligent Lab-
oratory Systems, 50, 1-18.
Mathworks (2011). http://www.mathworks.com/matlab
central/fileexchange/authors/29180.
Peng, K. (2005). A robust algorithm for eye detection on
gray intensity face without spectacles. JCST, Vol.5,
No.3.
Porter, G. T. (2003). Cochlear implants. In Grand Rounds
Presentation. UTMB, Dept. Of Otolaryngology.
Supriya, K. (2010). Facial Gesture Recognition using Cor-
relation and Mahalanobis Distance. IJCSIS, Vol. 7,
No.2.
Viola, P., J. M. (2001). Rapid object detection using a
boosted cascade of simple features. IEEE, Computer
Society Conference on Computer Vision and Pattern
Recognition, vol. 1, pp.511.
Zhang, Z. (2005). A robust method for eye features extrac-
tion on color image. Elsiever B.V., Pattern Recogni-
tion Letters, 26, 2252-2261.
Zhao, W. (2003). Face Recognition: A Literature Survey.
ACM Computing Surveys, vol. 35, no. 4, pp. 399-458.
FACE AND EYE TRACKING FOR PARAMETERIZATION OF COCHLEAR IMPLANTS
433
