
A TECHNOLOGICAL AND STATISTICAL STATE-OF-THE-ART
STUDY REGARDING ACTIVE MOTION-ORIENTED ASSISTIVE
DEVICES
Daniel Pina
1
, Ant
´
onio Augusto Fernandes
1,2
, Joaquim Gabriel Mendes
1,2
and Renato Natal Jorge
1,2
1
Instituto de Engenharia Mec
ˆ
anica, Porto, Portugal
2
Faculdade de Engenharia da Universidade do Porto, Porto, Portugal
Keywords:
Powered exoskeleton, Active orthosis, Rehabilitation robot.
Abstract:
Active orthoses and powered exoskeletons, among other denominations, are devices made to attach to one
or several human limbs in order to assist or replace its wearer’s movement through means of electronically-
controlled actuators and/or mechanical brakes. The technology developed for these devices can be used for
rehabilitation, general strength enhancement for industrial or military purposes, among other situations. In or-
der to create a comprehensive state-of-the-art work for this class of devices, several online scientific databases
were used to gather articles related to this subject. Afterwards, a custom database was created to contain,
organize and cross the information gathered from each relevant article. This work presents statistical results
regarding the actuation technologies, the man-machine interface sensors and the corresponding interpretation
algorithms. There is also a brief study about the localization of the scientific research, according to the tar-
geted body part of the active device. The results show that the DC Motor is, by a wide margin, the most used
actuator technology. This margin is reduced when wearable devices with weight constraints are developed.
The electromyographic sensors are the most widely used sensors, but when these are grouped into physical
variable classes, the force-related sensors show a higher number of occurrences. Regarding the processing
algorithms required for the man-machine interface, it is often required to develop a custom algorithm for these
devices.
1 INTRODUCTION
Active orthoses and powered exoskeletons, among
other denominations, are devices made to attach to
one or several human limbs in order to assist its
wearer’s movement through means of electronically-
controlled actuators and/or mechanical brakes. The
technology developed for these devices can be used
for various purposes, such as rehabilitation (Jia-fan
et al., 2010; Yuanjie Fan, 2009), industrial (Ya-
suhisa Hasegawa, 2010; Low et al., 2005) and general
strength enhancement (Kazerooni and Steger, 2006;
Cao et al., 2009a).
As seen in Figure 2, from 2005 onwards, the
global scientific community has shown a large in-
crease in the overall interest around these devices.
In order to create a comprehensive and organized
state-of-the-art bibliographic work, several articles re-
lated to active motion-oriented assistive devices, re-
gardless of their purpose, were gathered from seven
scientific databases.
There is a lack of a consistent naming convention
for these devices, creating some difficulties in the
task of gathering scientific bibliography over this sub-
ject. Depending on various authors and associated re-
search institutions, several different names have been
given to the same kind of devices, regardless of their
purpose, technology involved or target body parts.
Therefore, in order to gather as much articles related
to this subject as possible, the search was repeated
for each of the most recurrent terms used to describe
these devices.
Afterwards, a database was created to contain, or-
ganize and cross the information gathered from each
relevant article.
This work presents the statistical results regard-
ing the localization of the scientific research on these
devices, the actuation technologies, the man-machine
interface sensors and corresponding interpretation al-
gorithms.
245
Pina D., Augusto Fernandes A., Gabriel Mendes J. and Natal Jorge R..
A TECHNOLOGICAL AND STATISTICAL STATE-OF-THE-ART STUDY REGARDING ACTIVE MOTION-ORIENTED ASSISTIVE DEVICES.
DOI: 10.5220/0003795702450250
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2012), pages 245-250
ISBN: 978-989-8425-91-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
2 STATE-OF-THE-ART
DATABASE CONSTRUCTION
In order to gather information into the state-of-the-
art database, the following online search engines from
scientific research databases were used: ”Science Di-
rect”, ”IEEE Xplore”, ”MetaPress”, ”ACM Digital
Library”, ”ASME Digital Library”, ”IOP Science”
and ”Emerald”.
For each engine, a search was made for each of
the following terms: ”Exoskeleton”, ”Orthosis”, ”Or-
thesis” and ”Rehabilitation Robot”.
From the search results, all the articles containing
a description or a study about an existing active or-
thosis or powered exoskeleton (regardless of its func-
tionality, purpose or prototype stage) were selected.
The articles retrieved were made available under
the ”B-On: University of Porto” program.
This search, conducted during December 2010,
resulted in the retrieval of 203 articles. Out of these,
15 were state-of-the-art and/or comparison articles.
From each of the remaining 188 articles, various tech-
nical and non-technical characteristics were gathered
into a custom-made database, using Microsoft Office
Access 2010.
The purpose of this database is to provide statis-
tical studies regarding the scientific development of
active orthoses and exoskeletons, which can be au-
tomatically updated if more articles are added in the
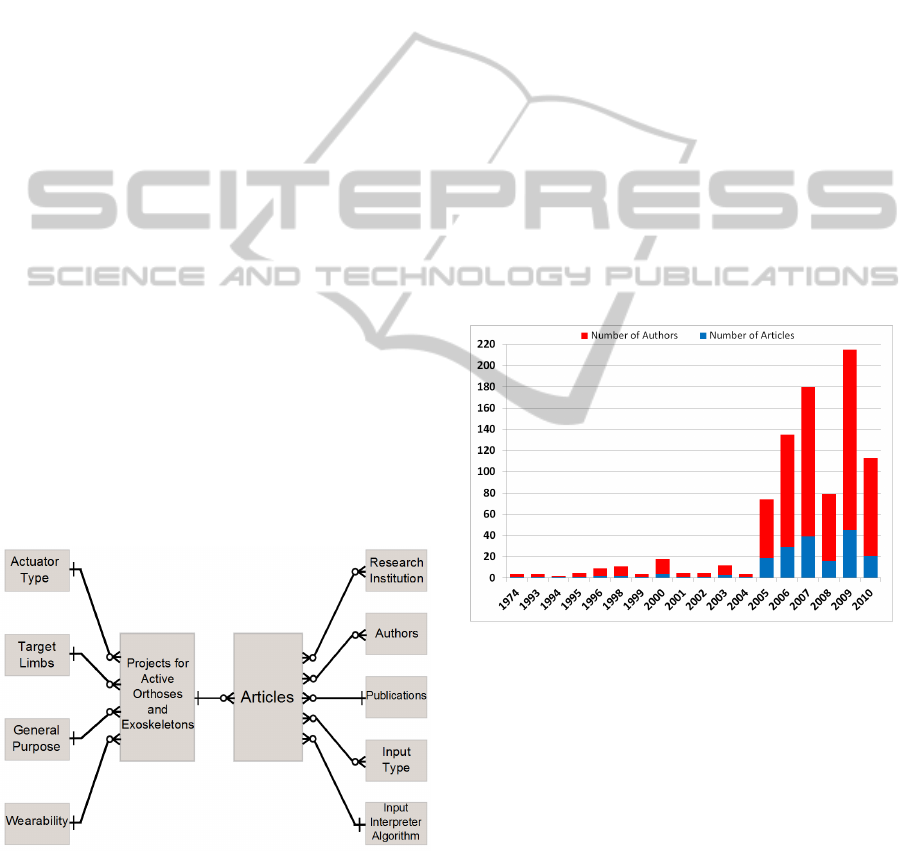
future. A simplified representation of the database’s
entity-relationship model can be found in Figure 1:
Figure 1: Simplified representation of the database’s entity-
relationship model, using Crow’s Foot Notation.
An article is included in the database as part of
a ”Project”, which can represent any device from a
hardware prototype in development stage to a com-
mercial product.
Each project describes the actuator technology
used, the target limbs or body parts, its main and sec-
ondary (if available) purpose, its wearability and the
related articles.
From each article entry, the database also records
its publication, the name of each author and associ-
ated research institution, the ”Input Type” (sensors
used for the user/patient interface, when applicable)
and the ”Input Processing Algorithm” (algorithm that
translates the user/patient’s ”will” to move between
the sensor interface and the computing system, when
applicable).
3 GENERAL STATISTICS
The first general statistics that can be taken from the
database is the general commitment from the scien-
tific community regarding active motion-oriented as-
sistive devices. Figure 2 shows the number of articles
gathered for each corresponding year of final draft, as
well the number of related authors.
Figure 2: In blue, the number of articles related to active
orthoses and exoskeletons gathered per year. In red, the
number of authors associated to the gathered articles.
Given that 2005 is the year where a large increase
in scientific interest was observed, all the statistical
studies presented in the article are, from this point,
calculated using articles from the beginning of 2005
onwards.
A relevant information that can be gathered from
the database is to determine which are the most de-
dicated research institutions for this kind of devices,
depending on the targeted body part. Figure 3 shows
the research institutions with more associated articles
for each targeted body part.
The terms ”Lower Limbs” and ”Upper Limbs” are
used for devices that attach and actuate over more
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
246

Figure 3: Number of articles associated to Active Orthoses
or Powered Exoskeletons, depending on the targeted body
part.
than one body part, such as entire limbs. For the
”Hands” and ”Knee”, the graphic considers only re-
search institutions with two or more article associ-
ations. For the other represented body parts, the
graphic considers research institutions with three or
more associations.
Out of the 123 Projects, 89 are primarily dedi-
cated to rehabilitation activities, from retraining mo-
tor movements to reestablishing or aiding motor
movement to target limbs due to injury or stroke.
The remaining 34 Projects are mostly dedicated to
strength and/or endurance enhancement, aimed at var-
ious activities like agriculture or industrial environ-
ments.
4 ACTUATOR TECHNOLOGY
The choice of the Actuator Technology for an active
assistive device depends on various factors, such as
operation noise and safety, energy efficiency, control-
lability, among other factors. However, when con-
sidering a portable or ”wearable” device, where the
user must support its weight, the torque/volume and
torque/weight become critical factors. The following
statistics show the proportions of Actuator Technolo-
gies chosen by researchers for active assistive devices
depending on their wearability.
Therefore, the results for the ”Actuator Type” in
each ”Project” were crossed with the ”Wearability”
table (seen in Figure 1) Three types of wearability are
considered:
• Not wearable (Figure 4), where the device is fixed
to a wall or a table, so the weight is less impor-
tant (Worsnopp et al., 2007; Banala et al., 2007).
• Wearable while sitting on a wheelchair (Figure 5),
where the weight of the device is supported by a
wheelchair (Herder, 2005; Rahman et al., 2010).
• Wearable while walking (Figure 6), where the de-
vice allows (or is planned to allow, at some point
in the prototype stage) the user to walk freely
while attached. In this case, the torque-per-weight
ratio holds the most importance since the user
and/or the device itself have to support the in-
creased weight (Cao et al., 2009b; Sankai, 2006).
Figure 4: Proportions of non-wearable active ortho-
sis/exoskeleton projects, grouped by actuator technology.
Figure 5: Proportions of active orthosis/exoskeleton
projects mounted on a wheelchair, grouped by actuator
technology.
The most popular actuator technology used for
creating active orthoses and exoskeletons is the DC
Motor. This actuator technology, and its various im-
plementations, is one of the oldest actuation technolo-
gies used in active devices. Therefore, various and ef-
fective control methods are well studied and pre-built
motor controllers can be achieved from several man-
ufacturers (Motorcontrol, 2011), making this techno-
logy easier to implement from a control standpoint.
However, some newer actuation technologies
(i.e. McKibben actuators) have a substantially larger
torque-per-weight ratio (Plettenburg, 2005), which
A TECHNOLOGICAL AND STATISTICAL STATE-OF-THE-ART STUDY REGARDING ACTIVE
MOTION-ORIENTED ASSISTIVE DEVICES
247

Figure 6: Proportions of wearable active ortho-
sis/exoskeleton projects, grouped by actuator technology.
should provide a practical advantage for weight-
dependent, or ”wearable” orthoses and exoskeletons.
The graphic in Figure 6 shows that the weight
concerns, when projecting a wearable device, are dri-
ving the scientific community to try other actuation
technologies with more convenient torque-per-weight
ratios, such as McKibben actuators, despite the in-
creased difficulty in developing control algorithms for
a stable and safe operation (Daerden, 1999).
5 MAN-MACHINE INTERFACE
5.1 Sensor Technologies
Regarding the following statistics, all the sensor input
types that are used for the man-machine interface be-
tween the user/patient and the device were gathered.
The sensors exclusively used for internal actuator op-
eration generally belong to a different part of the con-
trol loop and are more often documented within the
scientific studies related to the actuator technology.
As these studies may not relate directly to the de-
velopment of active orthoses and exoskeletons, these
sensors weren’t gathered into the database.
This information, represented as ”Input Type” in
Figure 1, was taken from each article, as different ar-
ticles in the same project may refer to different sensor
input hardware (Carignan et al., 2005; Carignan et al.,
2008).
The sensor technologies were grouped into ma-
jor categories, with each one determining the type of
physical variables each sensor is measuring.
The list of gathered sensor types was divided into
the following classes:
• Electromyographic sensors;
• Force-related sensors: consisted of torque sen-
sors, force sensors, floor-reaction-force sensors,
force-sensing-resistors and force transducers;
• Angle-related sensors: consisted of potentiome-
ters, rotary encoders, dc motor encoders, go-
niometers and gyroscopes;
• Other sensors: All the sensor technologies with
less than three occurrences like accelerometers,
on/off switches, optical tracking devices, among
others;
• No Input: referring to devices using automated
sequences for rehabilitation/training purposes,
without having a direct connection between the
user/patient and the device (Costa and Caldwell,
2006; Shibata et al., 2010);
• Undisclosed: term applied in the database when
an article doesn’t mention the sensor technol-
ogy used between the user/patient and the device,
which occurs in some articles dedicated to trial
tests and their results (Vanderniepen et al., 2008;
Boehler et al., 2008).
Figure 7: Proportion of sensor technologies, grouped by
physical variable classes.
5.2 Input Processing Algorithms
Another technological feature that can be evaluated
from the database is the ”Input Processing Algo-
rithm”. This is the algorithm used to process the
user’s ”will” to move the actuated limb or body part,
using the digital data retrieved from the sensors dedi-
cated to the man-machine interface.
Figure 8 shows the number of occurrences for the
most popular algorithms for the man-machine inter-
face used in active assistive devices. Like the sensor
technology, different articles belonging to the same
project may refer to experimenting different algo-
rithms while using the same orthosis/exoskeleton pro-
totype (Wege and Hommel, 2006; Wege and Zimmer-
mann, 2007). For this reason, this information was
taken from each article.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
248
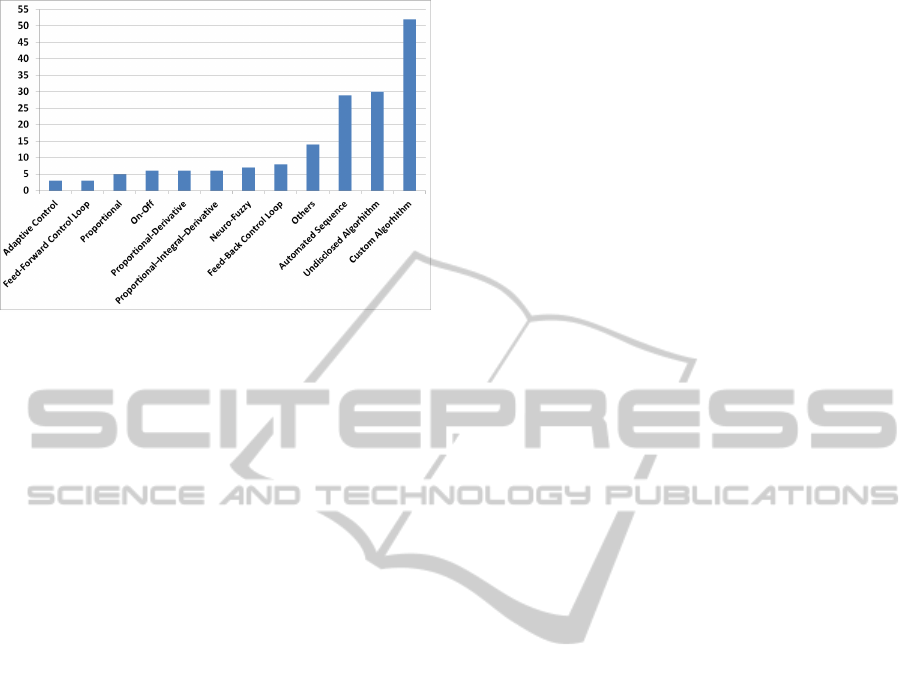
Figure 8: Number of occurrences for Input Processing Al-
gorithms, taken from the gathered articles.
The ”Automated Sequence” result refers to the lack
of a man-machine interface, and is therefore related
to the results for ”No Input” in the ”Sensor Input”
data. Algorithms with less than three occurrences
were gathered into a single group called ”Other”.
”Undisclosed Algorithm” is the term applied
when an article doesn’t mention what kind of al-
gorithm the device uses for interpreting the man-
machine interface(Raparelli et al., 2007).
”Custom Algorithm” refers to either a combina-
tion of the other mentioned algorithms or a com-
pletely new formula (Andreasen et al., 2005; Kong
et al., 2009). In these cases, an ”off-the-shelf” solu-
tion isn’t applied.
6 DISCUSSION AND
CONCLUSIONS
As seen in Figure 2, active orthoses and exoskeletons
have suffered a recent increased interest throughout
the scientific community, starting in 2005. This fact
can be explained through general advances in con-
trol and actuator technologies, the increasingly larger
trend of researching technological solutions for oth-
erwise difficult tasks and the ageing of the population
in certain countries.
The actuator statistics show that the most popular
actuator for active assistive devices is the DC Motor
so far. Although this actuator technology presents a
relatively low torque/weight and torque/volume ratio,
its matured control methods makes it the most widely
adopted choice.
However, when studying a wearable device with
weight and volume constraints, as we see in Fig-
ure 6, the DC Motor is seen to be adopted in less than
half of the studied projects. As actuator technologies
with higher torque/weight and torque/volume ratios
become mature, it may be expected to see DC Motors
being gradually replaced for wearable devices, partic-
ularly by McKibben actuators.
Regarding the statistics relative to the sensors
used, it can be seen that although force-related sensors
are actually being tried out in larger proportions, the
magnitude of occurrences is similar for all the classes.
The statistics relative to the Input Processing Al-
gorithm show that most of the time, a custom-made
algorithm is necessary to develop an efficient compu-
tational method to translate the user/patient’s ”will”
to move the actuated limb or body part. This means
that creating an algorithm to efficiently control an ac-
tive orthosis or exoskeleton usually becomes a very
relevant and time-consuming task during the develop-
ment of a functional device.
As for future work, the Authors’ plan is to keep
updating the database on a yearly basis, in order to
follow the technological advances and trends on ac-
tive motion-oriented assistive devices.
REFERENCES
Andreasen, D. S., Allen, S. K., and Backus, D. A. (2005).
Exoskeleton with emg based active assistance for re-
habilitation. In IEEE International Conference on Re-
habilitation Robotics.
Banala, S. K., Kulpe, A., and Agrawal, S. K. (2007). A
powered leg orthosis for gait rehabilitation of motor-
impaired patients (alex). In IEEE International Con-
ference on Robotics and Automation.
Boehler, A. W., Hollander, K. W., Sugar, T. G., and Shin,
D. (2008). Design, implementation and test results
of a robust control method for a powered ankle foot
orthosis (afo). In IEEE International Conference on
Robotics and Automation.
Cao, H., Ling, Z., Zhu, J., Wang, Y., and Wang, W. (2009a).
Design frame of a leg exoskeleton for load-carrying
augmentation. In EEE International Conference on
Robotics and Biomimetics.
Cao, H., Ling, Z., Zhu, J., Wang, Y., and Wang, W. (2009b).
sign frame of a leg exoskeleton for load-carrying
augmentation. In IEEE International Conference on
Robotics and Biomimetics.
Carignan, C., Liszka, M., and Roderick, S. N. (2005). De-
sign of an arm exoskeleton with scapula motion for
shoulder rehabilitation. In International Conference
on Advanced Robotics.
Carignan, C., Naylor, M. P., and Roderick, S. N. (2008).
Controlling shoulder impedance in a rehabilitation
arm exoskeleton. In IEEE International Conference
on Robotics and Automation.
Costa, N. and Caldwell, D. G. (2006). Control of a
biomimetic ”soft-actuated” 10dof lower body ex-
A TECHNOLOGICAL AND STATISTICAL STATE-OF-THE-ART STUDY REGARDING ACTIVE
MOTION-ORIENTED ASSISTIVE DEVICES
249

oskeleton. In International Conference on Biomedical
Robotics and Biomechatronics (BioRob).
Daerden, F. (1999). Conception and Realization of Pleated
Pneumatic Artificial Muscles and their Use as Com-
pliant Actuation Elements. PhD thesis, Vrije Univer-
siteit Brussel.
Herder, J. L. (2005). Development of a statically balanced
arm support: Armon. In IEEE International Confer-
ence on Rehabilitation Robotics.
Jia-fan, Z., Yi-ming, D., Can-jun, Y., Yu, G., Ying, C.,
and Yin, Y. (2010). 5-link model based gait trajec-
tory adaption control strategies of the gait rehabilita-
tion exoskeleton for post-stroke patients. Mechatron-
ics, 20, Issue 3.
Kazerooni, H. and Steger, R. (2006). The berkeley lower ex-
tremity exoskeleton. Transactions of the ASME, 128.
Kong, K., Moon, H., Hwang, B., Jeon, D., and Tomizuka,
M. (2009). Impedance compensation of subar for
back-drivable force-mode actuation. IEEE Transac-
tions on Robotics, 25:Issue 3.
Low, K. H., Liu, X., and Yu, H. (2005). Development of ntu
wearable exoskeleton system for assistive technolo-
gies. In International Conference on Mechatronics
and Automation.
Motorcontrol (2011). List of compa-
nies providing dc motor drives -
www.motorcontrol.com/2007homepagelinks/dccomp
anies.htm.
Plettenburg, D. H. (2005). Pneumatic actuators, a compar-
ison of energy-to-mass ratios. In Proceedings of the
2005 IEEE 9th International Conference on Rehabili-
tation Robotics.
Rahman, M. H., Saad, M., e, J. P. K., and Archambault, P. S.
(2010). Exoskeleton robot for rehabilitation of elbow
and forearm movements. In Mediterranean Confer-
ence on Control & Automation, Volume 18.
Raparelli, T., Zobel, P. B., Durante, F., Antonelli, M., Rai-
mondi, P., and Costanzo, G. (2007). First clinical in-
vestigation on a pneumatic lumbar unloading orthosis.
In International Conference on Complex Medical En-
gineering IEEE/ICME.
Sankai, Y. (2006). Leading edge of cybernics: Robot suit
hal. In SICE-ICASE International Joint Conference.
Shibata, Y., Imai, S., Nobutomo, T., Miyoshi, T., and ichi-
roh Yamamoto, S. (2010). Development of body
weight support gait training system using antagonis-
tic bi-articular muscle model. In Annual International
Conference of the IEEE EMBS, Volume 32.
Vanderniepen, I., Ham, R. V., Damme, M. V., and Lefeber,
D. (2008). Design of a powered elbow orthosis for
orthopaedic rehabilitation using compliant actuation.
In International Conference on Biomedical Robotics
and Biomechatronics (BioRob).
Wege, A. and Hommel, G. (2006). Development and con-
trol of a hand exoskeleton for rehabilitation of hand
injuries. In Human Interaction with Machines.
Wege, A. and Zimmermann, A. (2007). Electromyography
sensor based control for a hand exoskeleton. In Elec-
tromyography Sensor Based Control for a Hand Ex-
oskeleton.
Worsnopp, T. T., Peshkin, M. . A., Colgate, J. E., and Kam-
per, D. G. (2007). An actuated finger exoskeleton for
hand rehabilitation following stroke. In IEEE Interna-
tional Conference on Rehabilitation Robotics.
Yasuhisa Hasegawa, Kosuke Watanabe, Y. S. (2010). Per-
formance evaluations of hand and forearm support
system. In Conference on Intelligent Robots and Sys-
tems, IEEE/RSJ International.
Yuanjie Fan, Y. Y. (2009). Mechanism design and mo-
tion control of a parallel ankle joint for rehabilitation
robotic exoskeleton. In IEEE International Confer-
ence on Robotics and Biomimetics.
BIODEVICES 2012 - International Conference on Biomedical Electronics and Devices
250
