
PUTATIVE MATCH ANALYSIS
A Repeatable Alternative to RANSAC for Matching of Aerial Images
Anders Hast
1,2
and Andrea Marchetti
2
1
The Centre for Image Analysis, Uppsala University, Lägerhyddsvägen 2, Uppsala, Sweden
2
Institute of Informatics and Telematics, Consiglio Nazionale delle Ricerche, Via G. Moruzzi 1, Pisa, Italy
Keywords: RANSAC, Feature Matching, Image Stitching, Aerial Photos.
Abstract: One disadvantage with RANSAC is that it is based on randomness and will therefore often yield a different
set of inliers in each run, especially if the dataset contains a large number of outliers. A repeatable algorithm
for finding both matches and the homography is proposed that will yield the same set of matches every time
and is therefore a useful tool when trying to evaluate other algorithms involved and their parameters.
1 INTRODUCTION
In the process of finding corresponding points in two
or more images it necessary to determine which
points are true matches, so called inliers, and which
points are not matching, so called outliers. RANSAC
(Fishler and Bolles, 1981) is one of the far most used
algorithms for this purpose and many variants have
been proposed in literature (Chum et al., 2003;
Chum et al., 2004; Chum and Matas, 2005. Chum
and Matas, 2008; Michaelsen et al., 2006. Sattler et
al., 2009). The main disadvantage with RANSAC is
that it is not repeatable (Zuliani, 2009) since it is
based on random sampling, as the name itself
suggests: RANdom SAmple Consensus. Hence it is
difficult using RANSAC while trying to run tests of
other algorithms involved and changing their
parameters, as the set of inliers may vary in each
run.
We propose a repeatable algorithm that is not
based on randomness, which will find the same
inliers and thus the same homography (Vincent and
Laganiere, 2001) every time the same set of matches
is given to the algorithm. As it performs an analysis
based on the putative matches, we have chosen to
call it Putative Match Analysis or PUMA for short.
2 PUTATIVE MATCH ANALYSIS
The first step of PUMA is to construct what we have
chosen to call a Relative Polar Matrix (RPM). The
matrix is constructed in the following way as shown
in figure 1.
Figure 1: The RPM is constructed by taking the matches in
the two images (a) and translating all matches one at a
time so that one point coincide (b). A pair of vectors are
constructed from that point to each pair of inliers. When a
true match is used as base it will yield vectors with close
to equal relative length and angle for true matches but not
for false ones. A false match (c) on the other hand will
yield varying cosines and lengths.
The two matched images (a) are translated so
that one matching pair coincide, one at a time and
each of these comparisons are shown in the four
images to the right (b, c). First of all the green match
is translated so the points overlap and the relative
length of the vector from this point to a matching
pair as well as the cosine of the angle between these
are computed for all putative matches. The relative
length of these vectors
and
is:
=
min
(
,
)
max
(
,
)
(1)
341
Hast A. and Marchetti A..
PUTATIVE MATCH ANALYSIS - A Repeatable Alternative to RANSAC for Matching of Aerial Images.
DOI: 10.5220/0003802603410344
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 341-344
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Hence both the cosine of the angle: between
vectors and relative length: r will always be in the
interval
[
1. .1
]
and
[
0. .1
]
respectively. The first
column of the matrix will contain the results for this
first match and each row contains the pairs of
(
,
)
to each pair of matches. Those that are true inliers
(the yellow and blue), will yield similar values of
(
,
)
even if the images have different rotation and
scale. However, the false matches will yield pairs of
(
,
)
that have different values. Similarly when a
false match coincide (c), all putative matches will
yield quite different values of
(
,
)
. This procedure
is repeated for each match, hence the second column
will contain the pairs relative to this match and so
on.
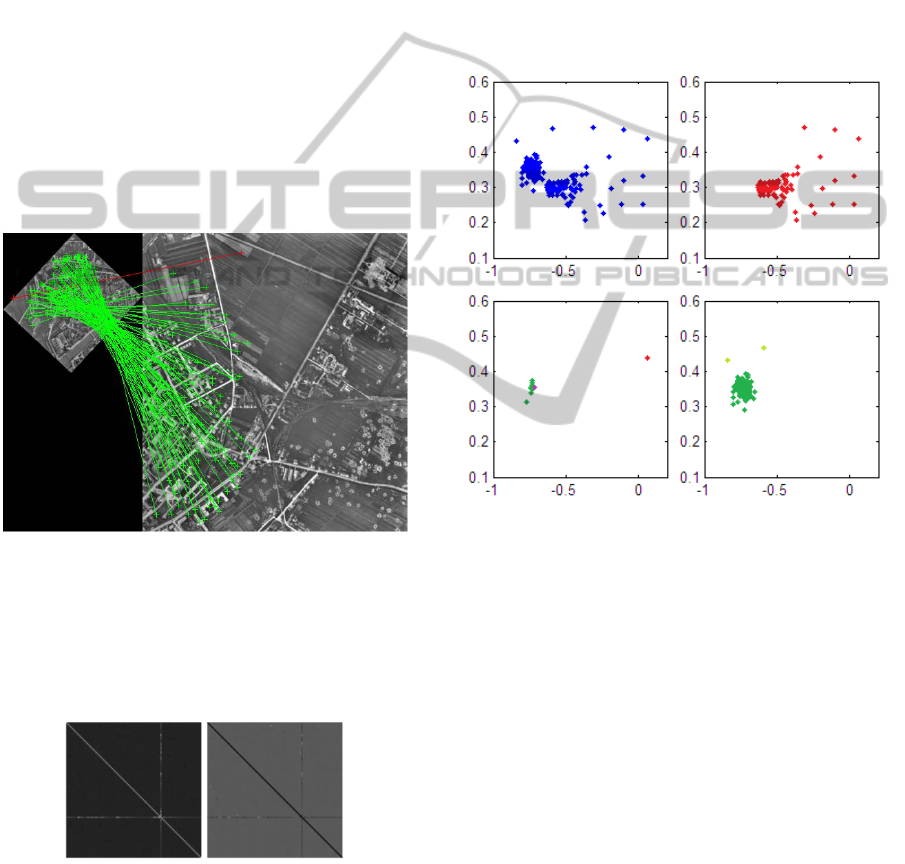
The first example of using this algorithm is
shown in figure 2 where one of the images is rotated
and scaled down just to show that the technique
works well for both cases.
Figure 2: Matching of two aerial images where one of
them is rotated and scaled. The method proposed finds the
outlier in red even for this extreme situation.
In figure 3 the RPM matrix is visualized showing
one matrix for , to the right and one for , to the
left.
Figure 3: The RPM matrix is visualized showing one
symmetric matrix for , to the left and one for in the
middle. In this case there is just one outlier giving a clear
trace in the matrices.
Each one of them are symmetric so all the
information could be packed into one matrix as the
diagonal contains no information as the points
cannot be compared to themselves. In this example
there is one outlier that gives a clear trace in the
matrix as its value differs from the others that are
similar.
The second step of PUMA can be performed in
several ways using the clustering technique of your
choice. Each column in the RPM matrix contains a
cluster that can be visualized using
(
,
)
as co-
ordinates. Figure 4 upper left shows all points in the
RPM plotted in the same plot and obviously it is
hard to say what cluster we are looking for.
Figure 4: The upper left: all points in the RPM. Upper
right: one set of the RPM is used in the plot and clearly it
contains an outlier as it is quite scattered. Bottom left: a
set containing an inliers is used and the outlier (red) is
seen far from the cluster center (violet). Bottom right: the
outlier has been removed and the whole RPMS is plotted
and the cluster contains only putative inliers.
In the upper right the set that corresponds to the
outlier is plotted. As expected the points are more
scattered. In the bottom left one set is plotted and the
outlier, depicted in red, is clearly seen far from the
centre, depicted in violet. In the bottom row right the
whole RPM is plotted after removing the outlier so
that it now contains putative inliers. Still there are a
couple of points lying a bit off centre that can be
dealt with by choosing a smaller threshold for the
clustering.
Clustering can be done in many ways (Jain and
Dubes) and k-means clustering (MacQueen, 1967)
is one popular clustering algorithm. Nevertheless,
the problem here is a bit different as there is one
cluster set for each row (or column as the RPM is
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
342
symmetric after removing any doubles) and the
columns are also related to each other. PUMA was
developed to work for aerial images, which will
form one cluster that we search for. The clustering
approach used here is very simple and starts by
computing the average
for each row of
(
,
)
,
thus giving a “centre” that is a bit perturbed by the
outliers. Then the distance between each point on the
row
(
,
)
and
is stored in a matrix, which we
have chosen to call the Relative Distance Matrix
(RDM). In each iteration the set with an outlier
furthest away from the average centre is located and
that outlier is therefore removed and the RDM is
updated accordingly.
In figure 4 bottom left is in fact the set having
the largest distance shown. The outlier is easily
found by locating the column with the largest value.
In this case it is column 65 that has its largest value
in row 9, indicating that it is the set with number 65
(column and row) that must be deleted as it gave the
largest distance for set number 9. So even if it is set
number 65 that is shown in the upper right in the
picture, it is actually set number 9 in the lower right
that helps us finding the most extreme outlier.
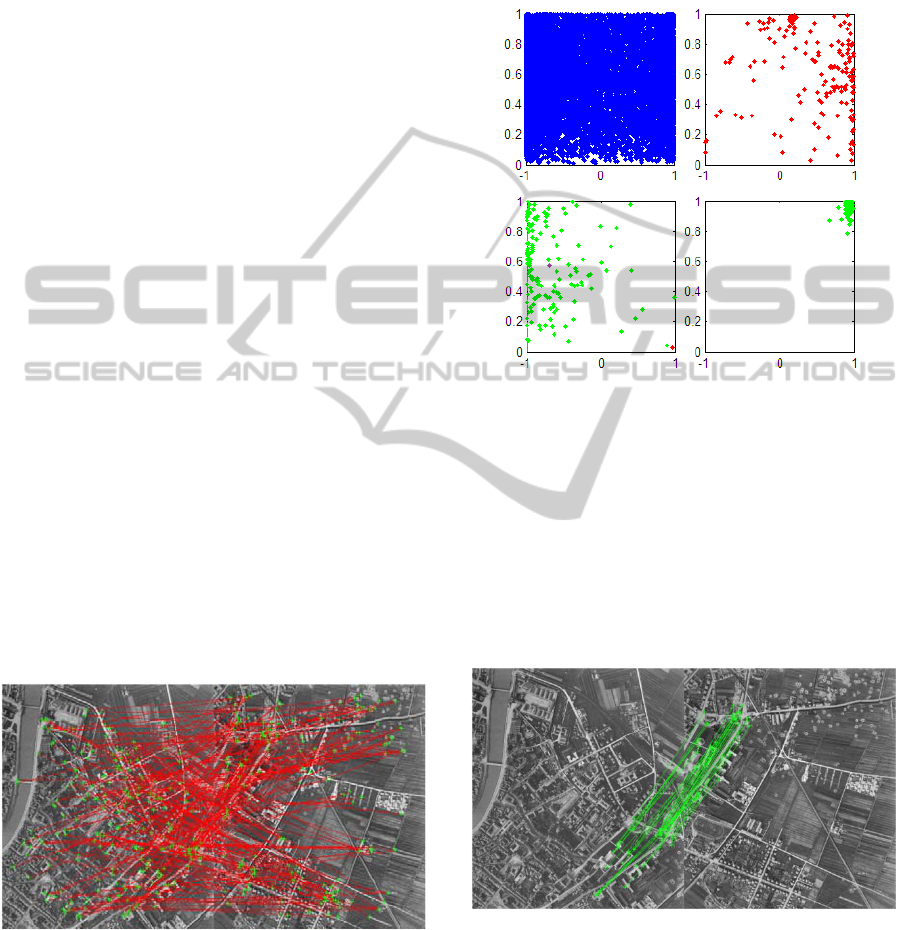
3 RESULTS
Two areal images, shown in figure 5, with different
orientation were used and in order to produce more
false matches the Harris operator (Harris and
Stephens 1988) was used instead of the more
accurate SIFT (Lowe, 2004). In this case the there
were about 84.4% of false matches.
Figure 5: Putative matches produced using the Harris
detector, with about 84.4% false matches.
In figure 6 is shown the whole set of clusters
plotted in the top left and the set corresponding to
the most extreme outlier in the top right where the
cluster is obviously scattered. In the bottom left
there is the set with the largest distance between the
centre and a point, ie. an outlier and will be removed
later in the algorithm. In the bottom right is the
result after removing all outliers down to a certain
threshold.
Figure 6: The upper left: all points in the RPM. Upper
right: one outliers set of the RPM, which clearly contains
an outlier as it is quite scattered. Bottom left: a set
containing another outlier (red) and the cluster centre
(violet) has the maximum distance. Bottom right: all the
outliers have been removed and the whole RPM is plotted
and the cluster contains only putative inliers.
The cluster is found in the upper right corner,
which corresponds to a little scaling and a small
rotation, about 18 degrees. The result contains all 34
columns regarded as inliers by the algorithm.
Figure 7: The result after executing the PUMA algorithm.
Out of 218 putative matches 34 were chosen as inliers.
Figure 7 shows the result of PUMA yielding 34
inliers out of 218 putative matches. It should be
noted that the basic implementation of RANSAC did
not come to a correct consensus due to the high
amount of outliers, however by forcing RANSAC to
PUTATIVE MATCH ANALYSIS - A Repeatable Alternative to RANSAC for Matching of Aerial Images
343
continue it found all inliers after an average of about
32000 iterations.
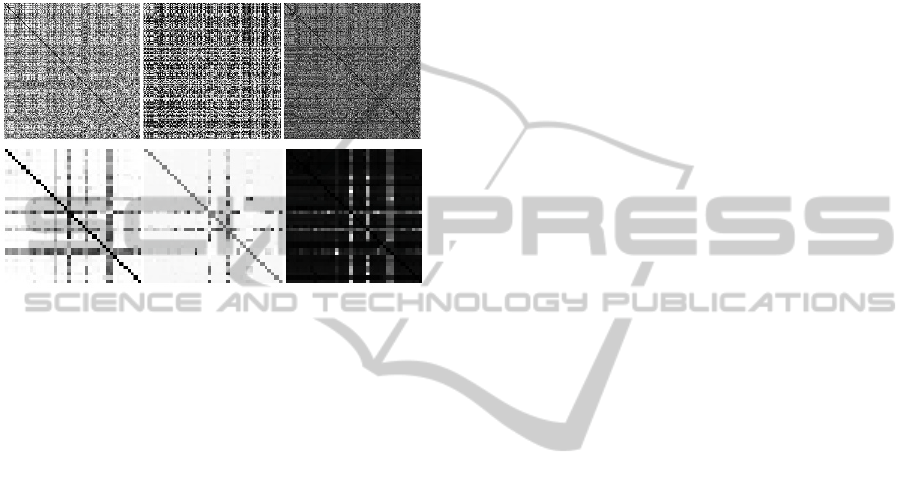
Figure 8 shows both the RPM and the RDM for
the whole set as well as for the case when 5 outliers
are remaining. Clearly it is hard to see which rows
and columns to remove in the upper row, while it
becomes more and more clear as the outliers are
removed.
Figure 8: The RPM matrix is visualized showing one
symmetric matrix for , to the left and one for in the
middle. And the RDM to the right. In the upper row is the
whole set and in the lower row (scaled to be larger) is the
set with five remaining outliers that gives a clear trace in
the matrices.
The homography can be computed using this set
of inliers and the set of inliers can easily be pruned
using ordinary RANSAC by setting a desired
threshold. As all matches are regarded as inliers
RANSAC will now without problem find all inliers
within that specific threshold.
4 CONCLUSIONS
The PUtative Match Analysis (PUMA) is a
repeatable, brute force algorithm that can be used
whenever it is necessary to test other parameters in
an application and when it is crucial that the set of
inliers are always the same for the same set of data.
Hence, it can be used as a robust tool for testing and
development of computer vision applications with
small non affine distortions as in the aerial images
used as examples. Due to its high computational cost
it will be outperformed by RANSAC in most
situations, but when there are many outliers, PUMA
can be a good choice for a reasonable number of
matches as it has proven to find the inliers even for a
rather high amount of noise in the set.
ACKNOWLEDGEMENTS
This work was carried out during the tenure of an ERCIM
"Alain Bensoussan" Fellowship Programme at IIT,
CNR in Pisa, Italy.
REFERENCES
Capoyleas, V., Rote, G. and Woeginger, G., 1991.
Geometric Clusterings, J. Algorithms, vol. 12, pp. 341-
356.
Chum, O., Matas, J., Kittler, J., 2003. Locally Optimized
RANSAC. In DAGM-Symposium. 236-243.
Chum, O., Matas, J and Obdrzalek, S., 2004. Enhancing
RANSAC by generalized model optimization. In
Proceedings of the Asian Conference on Computer
Vision (ACCV).
Chum, O. and Matas, J., 2005. Matching with PROSAC -
Progressive Sample Consensus. In Proceedings of the
IEEE Computer Society Conference on Computer
Vision and Pattern Recognition (CVPR). pp 220-226.
Chum, O. and Matas, J., 2008. Optimal randomized
ransac. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 30(8). pp1472–1482.
Fischler, M. A. and Bolles, R. C., 1981. Random sample
consensus: A paradigm for model fitting with
applications to image analysis and automated
cartography, Communications of the ACM, 24, pp.
381–395.
Harris, C., Stephens, C., 1988. A Combined corner and
edge detection. In Proc. of The Fourth Alvey Vision
Conference, pp. 147–151.
Jain, A. K. and Dubes, R. C., 1988. Algorithms for
Clustering Data. Englewood Cliffs, N.J.: Prentice
Hall.
Lowe, D. G., 2004. Distinctive Image Features from
Scale-Invariant Keypoints, International Journal of
Computer Vision, 60, 2, pp. 91-110.
MacQueen, J. B., 1967. Some Methods for classification
and Analysis of Multivariate Observations,
Proceedings of 5-th Berkeley Symposium on
Mathematical Statistics and Probability, Berkeley,
University of California Press, vol 1, pp. 281-297.
Michaelsen, E., von Hansen, W., Kirchhof, M., Meidow,
J., Stilla, U., 2006. Estimating the Essential Matrix:
GOODSAC versus RANSAC, PCV06, pp.1-6.
Sattler, T., Leibe, B., Kobbelt, L., 2009. SCRAMSAC:
Improving RANSAC's efficiency with a spatial
consistency filter. ICCV 2009: pp. 2090-2097.
Vincent, E. and Laganiere, R., 2001. Detecting planar
homographies in an image pair. Image and Signal
Processing and Analysis, pp. 182–187.
Zuliani, M., 2009. RANSAC for dummies. pp. 42.
http://vision.ece.ucsb.edu/~zuliani/Research/RANSAC
/docs/RANSAC4Dummies.pdf
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
344
