
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
Ali Mahdavi Amiri and Faramarz Samavati
University of Calgary, 2500 University Drive NW, Calgary, Canada
Keywords:
Hierarchical Data Structure, Half-edge, Subdivision, Patch-based Refinement.
Abstract:
In this paper, we introduce a hierarchical indexing for adjacency queries specially for applying subdivision
schemes on some simple spherical and toroidal polyhedrons as the base model for the content creation process.
The indexing method is created from integer coordinates of regular 2D domains (connectivity maps) resulting
from unfolding polyhedrons. All connectivities are found using algebraic relationships of the connectivity
map’s indices; therefore, no additional data structure is required and operations are extremely fast and efficient.
Although connectivity relationships of the polyhedrons are as simple as the first resolution, the models created
by our proposed method is not restricted to the subdivided polyhedrons. Using our connectivity based method,
complex objects can be created by adding sharp features and holes and applying deformation and remeshing
techniques. We demonstrate capacities and the efficiency of the method with several example results and
compare its speed with that of the half-edge data structure.
1 INTRODUCTION
To generate a complex graphical shape, it is com-
mon to start with a simple shape and progressively
make it more complex using basic geometric opera-
tions. Most graphical software packages (e.g. Maya
(Maya, 2011)) provide spheres, cubes, cylinders or
toroidal polyhedrons as primitive objects. Basic op-
erations for creating complex objects include reposi-
tioning their vertices, adding more vertices through
subdivision and adding features (e.g. holes). In par-
ticular, using surface subdivision schemes not only
provides more vertices for manipulating the shape but
also creates a very useful hierarchy resulting from dif-
ferent levels of subdivision.
To support such a hierarchy and efficient opera-
tions (such as neighborhood-finding), a well-designed
data structure is required. A common data structure
for graphical objects is the half-edge data structure
(Weiler, 1985; Kettner, 1998). However, the half-edge
data structure is not naturally able to support subdivi-
sion hierarchies. Moreover, half-edge data structure
is very slow at high levels of subdivision due to the
extensive amount of connectivity information that the
half-edge needs to store (see Section 9).
A frequently used alternative is quadtree repre-
sentation (Samet, 2005). Quadtrees are able to sup-
port the hierarchy but are inefficient for neighborhood
finding. Moreover, a quadtree needs to store connec-
tivity between nodes in consecutive resolutions mak-
ing it inefficient in terms of space. To avoid this
problem, there are some proposed indexing meth-
ods trying to assign an index to each vertex and re-
move the tree structure. Existing indexing methods
for quadtrees are typically targeted at supporting hier-
archies between parent and children nodes but they
are unable to quickly find a specific node’s neigh-
bors. It is also possible to use patch-based methods
for subdivision schemes (Bunnell, 2005; Shiue et al.,
2005; Peters, 2000). However, using such methods
connectivity of vertices specially for extra-ordinary
and boundary vertices is not well defined. As a re-
sult, they need to maintain the connectivity using ad-
ditional structures such as half-edge data structures.
Previously proposed data structures typically try
to maintain the arbitrary connectivity using compli-
cated pointer-based data structures. However, we es-
tablish our work based on simple polyhedrons with
straightforward connectivities to ease the connectivity
inquiries. To assign geometry on polyhedron’s ver-
tices, we use an indexing method as a data structure
to support operations such as neighborhood finding,
hierarchical traversal, and subdivision. To obtain this
data structure, we first unfold a simple polyhedron,
such as a cube, tetrahedron, octahedron, or toroidal
polyhedron (see Section 3) as the shapes forming the
base topology. The resulting 2D domain (connectiv-
ity map) is then used for assigning integer indices to
26
Mahdavi Amiri A. and Samavati F..
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES.
DOI: 10.5220/0003814200260037
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 26-37
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

(0,2)
0
(1,3)
0
(0,3)
0
(2,1)
0
(1,4)
0
(2,4)
0
(2,3)
0
(2,2)
0
(3,3)
0
(3,2)
0
(1,2)
0
(1,1)
0
(1,0)
0
(2,0)
0
(0,32)
4
(16,16)
4
(16,0)
4
(32,0)
4
(32,16)
4
(48,32)
4
(48,48)
4
(32,64)
4
(16,64)
4
(0,48)
4
Flattening
S
4
Editting
Figure 1: The initial cube’s connectivity map and its subdivided version.The cube’s vertices are manipulated and a chess piece
is obtained. The connectivity map’s indices are shown beside them. (a, b)
r
indicates the vertex with index (a, b) at resolution
r.
every vertex of the polyhedron based on its Cartesian
coordinates. These integer indices refer to entries of
a 2D array storing vertices’ 3D positions. Using such
connectivity maps, simple operations in 2D are de-
fined to find the neighbors of a face or vertex. Indeed,
simplicity of the proposed connectivity maps result
simple operations for connectivity inquiries. Using
such connectivity maps, all the vertices, edges and
face’s connectivities can be found using algebraic re-
lationships. In summary, our approach is devoted to
defining the connectivity and the topology of geomet-
ric models as a primary goal while the geometry and
its modifications (including subdivision schemes) are
added as a secondary goal.
Although we use simple polyhedrons, complex
objects can be created using this data structure. For
creating complex shapes, the initial simple polyhe-
dron can be subdivided using various subdivision
schemes such as linear, Catmull-Clark or Loop sub-
division. The location of subdivided vertices can then
be modified (manually or automatically) using defor-
mation techniques or remeshing methods to create the
desired shapes and holes and sharp features can also
be added. Note that in this representation, it is only
necessary to store vertex positions since the connec-
tivity of edges and faces is implicit (See Fig 1).
Our main contribution is to introduce connectivity
maps for polyhedrons. The coordinates of the con-
nectivity maps’ vertices are considered as indices that
can address adjacency queries and provide 3D loca-
tions. Initial connectivity maps are provided and com-
plicated pre-processing steps are not required. After
establishing the initial connectivity maps, subsequent
resolutions are formed based on the initial connec-
tivity maps. Using the proposed connectivity maps
and the indexing method, adjacency and hierarchical
queries are addressed using fast and straightforward
algebraic relationships.
The rest of the paper is organized as follows: Re-
lated work is discussed in Section 2. We discuss the
indexing scheme in Section 3. Hierarchical traversal
and neighborhood vectors are discussed in Section 4.
We clarify how to apply Loop and Catmull-Clark sub-
division using our method in Section 5. Hierarchical
mesh editing is discussed in Section 6. We describe
some possible methods to generate complex objects
with simple connectivities in Section 7. Extracting
connectivity information of geometry images is de-
scribed in Section 8 and finally we compare the speed
of the proposed indexing with that of the half-edge in
Section 9.
2 RELATED WORK
Generating an object using subdivision schemes such
as Loop and Catmull-Clark is a standard method for
geometric modeling (Loop, 1987; Catmull and Clark,
1998). The half-edge and quadtree are two commonly
used data structures to support subdivision schemes
(Weiler, 1985; Kettner, 1998; Samet, 2005; Zorin
et al., 1997). However, when the information stored
by a data structure becomes very large, it is inefficient
to use pointer based data structures for storing con-
nectivity information (Samet, 1990; Samet, 1985). In
order to avoid pointers, some indexing methods have
been proposed to index mesh vertices and faces.
Proposed indexing methods for quadtrees (Samet,
1985; Gargantini, 1982) can be used for represent-
ing meshes. However, as a very important inquiry
for mesh processing, neighborhood finding is not effi-
cient enough for interactive applications. In our work,
we derive some simple algebraic operations for find-
ing neighbors of a given face or vertex. The benefit
of algebraic operations is not only that neighbors of a
face or vertex can be found in constant time, but fur-
ther faces or vertices such as neighbors of neighbors
(more than 1-ring neighborhood) are also accessible
in constant time.
Patch-based methods generally divide the mesh
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
27
(0,0)0 (1,0)0
(2,0)0
(2,1)0
(1,1)0(0,1)0
(0,2)1
(0,0)1
(0,1)1
(2,2)1
(2,0)1
(4,0)1
(4,2)1
(1,0)0
(2,0)0
(1,1)0
(1,2)0
(1,3)0
(1,4)0
(0,3)0
(0,2)0
(2,1)0
(2,2)0
(2,3)0
(2,4)0
(3,2)0
(3,3)0
(2,0)1 (4,0)1
(2,2)1
(0,4)1
(0,5)1
(0,6)1
(2,8)1
(3,8)1
(4,8)1
(6,6)1
(6,4)1
(6,5)1
(4,2)1
(0,0)0
(1,0)0
(2,0)0
(0,1)0
(0,2)0
(1,2)0
(2,1)0
(2,2)0
(0,0)1
(2,0)1
(4,0)1
(0,2)1
(0,4)1
(2,4)1 (4,4)1
(4,2)1
(4,1)1
(0,0)0
(3,0)0
(0,4)0
(3,4)0
(0,2)0 (0,4)1
(0,0)1
(6,0)1
(0,8)1
(6,8)1
(6,4)1
(3,2)0
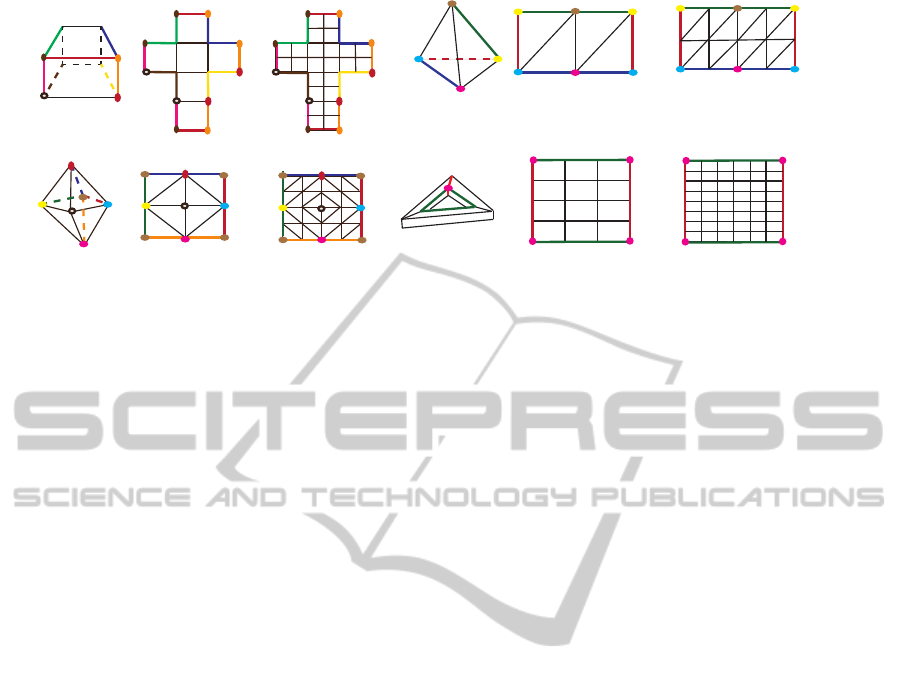
Figure 2: A cube, tetrahedron, octahedron and a toroidal polyhedron and their 2D domain at the first and the second resolu-
tions. (a, b)
r
indicates the index of a vertex at resolution r. Vertices or edges with the same colors on 2D domain are copies of
one vertex or edge in 3D. Boundary edges are highlighted by thicker lines.
into collection of separated faces and consider arrays
for each single patch (Bunnell, 2005; Shiue et al.,
2005; Peters, 2000). These methods are specifically
designed for handling subdivision schemes specially
Catmull-Clark subdivision. Using the method pre-
sented by (Bunnell, 2005), the surface can be divided
into some patches connected by an edge based data
structure such as the half-edge and fine resolution ver-
tices are stored in separate 2D arrays. This method
is designed for general quad meshes resulting from
Catmull-Clark subdivision but it cannot support tri-
angular meshes and Loop subdivision. In compari-
son with (Bunnell, 2005), we propose an indexing for
important simple shapes. We can support Loop and
Catmull-Clark subdivision schemes and we establish
algebraic relationships for neighbors of boundary ver-
tices that enable us to avoid half-edge data structure
at the first resolution. Although we use simple poly-
hedrons for establishing connectivities, our method is
not restricted to simple objects. Using remeshing and
sketch-based deformation techniques and supporting
sharp features and holes, we can create complex ob-
jects that benefit from polyhedron’s simplicity.
Shiue et al. use an alternative way to apply sub-
division methods (Shiue et al., 2005). They initially
subdivide the mesh using an edge based data structure
in a pre-processing step. They then divide the mesh
into some patches with repetitive boundary vertices.
Each patch’s vertices is indexed using a spiral index-
ing and located in a 1D array. Using a spiral index-
ing methods, close vertices may get unrelated indices.
Therefore, this method does not establish a straight-
forward relationship for neighborhood finding and ac-
cess to neighbors of a vertex needs to traverse the spi-
ral. Consequently, previous patch based refinement
methods are specifically designed to support subdi-
vision methods and they do not consider the shape’s
connectivity relationship which is an important aspect
of the geometric modeling.
Since our method uses a flattened regular shape
for meshes, it is also somehow related to the
parametrization problem (Hormann et al., 2007). Pa-
rameterization is used for different applications such
as texture mapping, mesh editing and Geometry Im-
ages. For creating Geometry Images, Gu et al. (Gu
et al., 2002) uses cuts in order to flatten a general
topology object. They then resample the flattened ob-
ject to create a regular surface called a ”geometry im-
age”. They generate an image to store the vertex loca-
tions of objects in such a way that red, green and blue
components of an image represent x,y and z locations
of a vertex respectively. Boundary extension rules are
not straightforward in this method; therefore, connec-
tivity relationships are hard to find for boundaries.
Praun and Hoppe (Praun and Hoppe, 2003) pro-
pose a spherical parameterization to generate regu-
lar meshes of genus 0 objects using the octahedron,
cube or tetrahedron. They parameterize an object to
a sphere then use one of the mentioned polyhedra
for resampling and create a regular mesh. Meshes
obtained from (Praun and Hoppe, 2003) are depen-
dent on the geometry of initial shapes that have to
be remeshed. Therefore, small changes in geome-
try images need modification of the initial shape, re-
quiring an expensive reparameterization of the entire
mesh. However, our method begins with a 2D regu-
lar domain (connectivity map) for an efficient access
to the connectivity information, and also maintains
this regularity during geometry changes (editing, de-
formation, and subdivision operations). Additionally,
changing the mesh at any resolution can be propa-
gated to further resolutions without using expensive
operations. Because of this, our method can be a good
complementary work for Geometry Images. In sum-
mary, to have a comparable title with (Gu et al., 2002),
our work can be conceptually considered as Connec-
tivity Images.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
28

3 THE INDEXING SCHEME
Since the indexing method works based on 2D vectors
of Cartesian coordinates, the initial polyhedron must
be flattened. There are many ways to unfold these ini-
tial objects but we use the one in which connectivity
maps have easier boundary rules (see Figures 1 and
2). We then locate every vertex of the polyhedron on
integer Cartesian coordinates. These integer coordi-
nates are used as the vertices’ index. Working with
this simple shape is not enough for many applications
and it only creates a base topology of shapes, there-
fore it is necessary to support subdivision. To keep
track of the levels of subdivision, we also use an extra
index, the subscript index, as the resolution or level of
subdivision. Therefore, a vertex with index (a, b)
r
is
a and b steps far from the origin in X and Y directions
at resolution r.
(a,b)
r
[a,b]
r
T
1
(a+1,b)
r
(a+1,b+1)
r
(a,b+1)
r
(a)
T
1
T
2
T
2
(a,b+1)
r
(a,b+1)
r
(a,b)
r
(a+1,b)
r
(a+1,b+1)
r
(a,b)
r
(a+1,b)
r
(a+1,b+1)
r
(c)(b)
Figure 3: (a) A quadrilateral face, and the index of its faces
and vertices. (b,c) Two forms of triangular faces of a quadri-
lateral face.
We use the resulting 2D integer coordinates as in-
dices to a 2D array containing the locations of ver-
tices. We also use the same index for addressing
faces. The index of the left-bottom vertex of a face is
considered as its index. Therefore, based on a face’s
index, indices of its vertices are computable and vice
versa. Indeed, if the left bottom vertex of a face is
(a, b)
r
, vertices making this face have indices (a, b)
r
,
(a + 1, b)
r
, (a + 1, b + 1)
r
and (a, b + 1)
r
. This rela-
tionship is valid for quadrilateral faces. Because of
the regularity of triangular faces in our initial poly-
hedron, it is possible to assign faces’ indices to quads
formed by triangles. There are two possible triangular
faces for each quad (see Fig 3). All triangular faces
of a tetrahedron has the form of Fig 3.b. However,
based on the region in which a quad falls (see Fig 2),
triangles of an octahedron can have forms of Fig 3.b
or Fig 3.c.
4 HIERARCHICAL TRAVERSAL
AND NEIGHBORHOOD
VECTORS
Hierarchical Traversal. In our method, when a face is
subdivided using linear, Catmull-Clark or Loop sub-
division methods, it is split into four faces after each
level. Fine faces generated by splitting a coarse face
are called children and the coarse face is called par-
ent. One of the important hierarchical operations is to
find indices of all the children of a given face [a, b]
r
(we use [a, b]
r
for faces’ indices to distinguish them
from vertices’ indices represented by (a, b)
r
) at reso-
lution r + k
1
or finding the index of its parent at reso-
lution r − k
2
(k
1
, k
2
> 0).
To maintain efficient hierarchical operations and
regularity, after each level of subdivision, we use
the same 2D coordinates for the vertices from pre-
vious levels. Since every face is split into four faces,
the length of unit vectors is divided by two. There-
fore, unit vectors (0, 1)
r
and (1, 0)
r
are equal to
2 × (0, 1)
r+1
and 2 × (1, 0)
r+1
respectively. Result-
ing from these relationships, we can derive the hierar-
chical relationship of a vertex at different resolutions.
Equations 1 and 2 imply correspondent indices of ver-
tex (a, b)
r
at resolutions r + k and r − k respectively.
Note Equation 2 must only applied to vertex-vertices.
(a, b)
r
= (2
k
a, 2
k
b)
r+k
(1)
(a, b)
r
= (
a
2
k
,
b
2
k
)
r−k
(2)
Similarly, a face with index [a, b]
r
has children
with indices [2a, 2b]
r+1
, [2a + 1,2b]
r+1
, [2a, 2b +
1]
r+1
and [2a + 1, 2b + 1]
r+1
(Fig 5). In general af-
ter n (n > 0) levels of subdivision, a face with index
[a, b]
r
would have children with indices [c, d]
r+n
in
which 2
n
a ≤ c < 2
n+1
a and 2
n
b ≤ d < 2
n+1
b. There-
fore, a face with index [a, b]
r
has a parent with index
[
a
2
n
,
b
2
n
]
r−n
.
Neighborhood Vectors. Since each vertex of the
connectivity map is located on an integer 2D Carte-
sian coordinate, there are vectors that connect vertex
v to all its neighbors. These vectors are called neigh-
borhood vectors which differ based on the underlying
polyhedra’s connectivity maps. Figure 4 illustrates
them for the initial polyhedra.
Neighborhood vectors illustrated in Figure 4 are
used for internal vertices. Unfolded polyhedrons have
boundary edges and vertices which are shown in Fig-
ure 2. Since boundary vertices have multiple copies in
connectivity maps, their neighbors are split into mul-
tiple locations surrounding each copy. As a result,
to determine neighbors of boundary vertices, their
copies must also be found (Fig 2).
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
29

(0,1)
r
(1,0)
r
(0,-1)
r
(-1,0)
r
(0,1)
r
(1,1)
r
(1,0)
r
(0,-1)
r
(-1,-1)
r
(-1,0)
r
(a)
(b)
(0,1)
r
1
2
3
4 5
6
7
1
2
3
5
4
6
7
3
1
(c)
1
2
3
4
5
6
7
(1,1)
r
(1,0)
r
(1,-1)
r
(0,-1)
r
(-1,0)
r
(-1,0)
r
(0,1)
r
(1,0)
r
(0,-1)
r
(-1,-1)
r
(-1,0)
r
(-1,1)
r
(0,1)
r
(1,0)
r
(0,-1)
r
(0,1)
r
(1,0)
r
(1,-1)
r
(0,-1)
r
(-1,-1)
r
(-1,0)
r
(0,1)
r
(1,1)
r
(1,0)
r
(0,-1)
r
(-1,-1)
r
(-1,0)
r
(1,1)
r
(0,1)
r
(-1,1)
r
(1,0)
r
(0,-1)
r
(-1,0)
r
(0,2
r+1
)
r
(2
r+1
,2
r+1
)
r
(2
r+1
,0)
r
(0,0)
r
(-1,1)
r
(0,1)
r
(1,0)
r
(-1,0)
r
(0,-1)
r
(1,-1)
r
Figure 4: (a) Neighborhood vectors for a cube or a toroidal polyhedron . (b) Neighborhood vectors for a tetrahedron. (c)
Seven possible neighborhood vectors for an octahedron. Based on the region in which the vertex falls, neighborhood vectors
can be determined. For example, if a vertex falls in the region 0 < a, b < 2
r
, its neighborhood vector is of the condition 1.
(a)
(b)
(c)
(0,1)
r
(0,1)
r+1
(a,b)
r
[a,b]
r
(d) (e)
(f)
(1,1)
r
(1,0)
r+1
(a+1,b)
r
(a+1,b+1)
r
(a,b+1)
r
(2a,2b+2)
r+1
(2a+2,2b+2)
r+1
(2a,2b)
r+1
(2a+2,2b)
r+1
[2a+1,2b]
r+1
[2a+1,2b+1]
r+1
[2a,2b]
r+1
[2a,2b+1]
r+1
Figure 5: (a) A face at resolution 0. (b) The patch obtained
from (a) at resolution 1. (c) The patch obtained from (a)
at resolution 2. (d) Unit vectors at resolutions r and r + 1.
(e) A face’s index and its vertices’s indices at resolution r.
The patch obtained from (e) and it’s faces’ indices. Green
indices are vertex indices and black ones are face’s indices.
To recognize if A = (a, b)
r
is a boundary vertex,
we check whether it falls along one of the bound-
ary edges of the initial connectivity map. Consider
boundary edge e connecting two first resolution ver-
tices P = (x
p
, y
p
)
0
and Q = (x
q
, y
q
)
0
. A is located
on boundary edge e if its index (a, b)
r
is in be-
tween of the indices of P and Q at resolution r. Us-
ing Equation 1, P and Q respectively have indices
(2
r
x
p
, 2
r
y
p
)
r
and (2
r
x
q
, 2
r
y
q
)
r
at resolution r. There-
fore, A = (a, b)
r
is located on e if min
2
r
x
p
, 2
r
x
q
≤
a ≤ max
2
r
x
p
, 2
r
x
q
and min
2
r
y
p
, 2
r
y
q
≤ b ≤
max
2
r
y
p
, 2
r
y
q
. This relationship is general for all
boundary edges. However, boundary edges of the pro-
posed polyhedrons typically have simpler conditions.
For instance, the toroidal polyhedron has four bound-
ary edges and A = (a,b)
r
is located along one of the
boundary edges when a = 0, b = 0, a = 3 × 2
r
or
b = 4 × 2
r
(Fig 2).
After recognizing that a vertex is located on the
connectivity map’s boundary, its neighbors have to be
determined. As we discussed earlier, to find neigh-
bors of a boundary vertex, its copies are required.
Copies of vertices at the initial resolution are known
based on the connectivity map. To determine copies
of a boundary vertex at resolution r, we propose a
general method that can be applied to all the proposed
polyhedrons. This general method’s basic idea is to
first find edge e on which boundary vertex A is lo-
cated (Fig 6). Afterwards, having the e’s copy which
is obtainable from the connectivity map, the index of
A’s copy is determined. We describe the mathemati-
cal representation of this issue in the following.
Let A = (a, b)
r
be a boundary vertex whose copy,
C = (c, d)
r
, is required (see Fig 6). A is located
on a first resolution edge e connecting P = (x
p
, y
p
)
0
and Q = (x
q
, y
q
)
0
. P and Q respectively have copies
Z = (x
z
, y
z
)
0
and W = (x
w
, y
w
)
0
at the first resolution.
A can be written as a linear combination of P and Q.
A = (1 − α)P + αQ. Using copies of P and Q, the
copy of A can be determined as C = (1 − α)Z + αW .
For instance, consider the vertex with index A =
(a, b)
r
= (0, 21)
3
on the cube’s 2D domain (Fig 6).
Since a = 0, this vertex is located on the edge con-
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
30

P=(xp,yp)
0
Q=(xq,yq)
0
W=(xw,yw)
0
Z=(xz,yz)
0
P=(0,2)
0
Q=(0,3)
0
A=(0,21)
3
C=(8,3)
3
C=(c,d)
r
W=(1,0)
0
Z=(1,0)
0
e
e
A=(a,b)
r
Figure 6: Left: copy of A = (a, b)
r
is shown by a white vertex. Copy of A, C = (c, d)
r
, is found using the described general
method. e and its copies are respectively highlighted by green and orange vectors. Right: an example of the general method
to find the copy of (0, 21)
3
.
necting vertices with indices P = (0, 2)
0
= (0, 16)
3
and Q = (0, 3)
0
= (0, 24)
3
. Therefore, (0, 21)
3
= (1−
α)(0, 16)
3
+ α(0, 24)
3
⇒ α =
5
8
. Since copies of P
and Q have respectively indices Z = (1, 1)
0
= (8, 8)
3
and W = (1, 0)
0
= (8, 0)
3
. C =
3
8
(8, 8) +
5
8
(8, 0)
3
=
(8, 3)
3
.
After finding copies of a boundary vertex (A),
neighborhood vectors are applied on A and its copies.
Resulting neighbor vertices are stored in set N. Af-
terwards, Repetitive Vertices of N and those vertices
that fall out of the 2D domain are excluded. To dis-
card repetitive vertices, we keep neighbors that are di-
rectly obtained by applying neighborhood vectors on
A and then eliminate their copies. It is not necessary
to do the same process for every single resolution. It
is enough to find neighbors of boundary edges at one
resolution and then extend it to next resolutions using
Equation 1.
5 SUBDIVISION METHODS
To generate complex objects, it is possible to subdi-
vide the initial object, manipulate resulting vertices
in a small number of iterations until the desired ob-
ject is formed. After an application of linear, Loop or
Catmull-Clark subdivision, each face is split into four
faces, and some new vertices are generated. To sup-
port the possibility of creating more advanced shapes
and also to demonstrate the usefulness of the indexing
method proposed for the connectivity maps, in this
section, we describe how to perform smooth subdivi-
sion schemes using the indexing method.
5.1 Catmull-Clark Subdivision
Each iteration of Catmull-Clark subdivision requires
a face split operation and also a relocation of resulting
vertices through subdivision masks. We have already
described hierarchical relationships resulting from the
face split in Section 4. Here we discuss how to apply
subdivision masks on the quad faces of the cube and
toroidal polyhedron. Masks of Catmull-Clark subdi-
vision are as follows (Halstead et al., 1993):
f
i+1
j
=
1
4
∑
j
v
i
j
(3)
e
i+1
j
=
v
i
+ e
i
j
+ f
i+1
j−1
+ f
i+1
j
4
(4)
v
i+1
=
n − 2
n
v
i
+
1
n
2
∑
j
e
i
j
+
1
n
2
∑
j
f
i+1
j
(5)
In the neighborhood of vertex v
i
, f
i+1
1
, f
i+1
2
,...,
f
i+1
n
and e
i+1
1
, e
i+1
2
, ..., e
i+1
n
are respectively face-
vertices and edge-vertices and v
i+1
is the vertex-
vertex at the resolution i + 1.
After one level of subdivision, a face with index
[a, b]
r
is split into four faces [2a, 2b]
r+1
, [2a +1, b]
r+1
,
[2a + 1, 2b + 1]
r+1
and [2a, 2b + 1]
r+1
as illustrated
in Fig 7. These faces’ vertices must be computed
using Catmull-Clark subdivision masks. Applying
Equation 3 on face [a, b]
r
, the face-vertex Q
(1,1)
=
(2a + 1, 2b + 1)
r+1
is computed using the following
equation:
Q
(1,1)
=
P
(0,0)
+ P
(1,0)
+ P
(1,1)
+ P
(0,1)
4
, (6)
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
31

where P
(0,0)
, P
(1,0)
, P
(1,1)
, and P
(0,1)
respectively have
indices (a, b)
r
, (a + 1, b)
r
, (a + 1, b + 1)
r
, and (a, b +
1)
r
.
After finding face vertices, edge-vertices (2a +
1, 2b)
r+1
, (2a + 2, 2b + 1)
r+1
, (2a + 1, 2b + 2)
r+1
and
(2a, 2b + 1)
r+1
are computed using (4). For exam-
ple, as demonstrated in Fig 7 (d), the edge-vertex
Q
(1,2)
= (2a + 1, 2b + 2)
r+1
is determined by:
Q
(1,2)
=
Q
(1,1)
+ Q
(1,3)
+ P
(0,1)
+ P
(1,1)
4
, (7)
where Q
(1,1)
, Q
(1,3)
, P
(0,1)
, and P
(1,1)
respectively
have indices (2a + 1, 2b + 1)
r+1
, (2a + 1, 2b + 3)
r+1
,
(a, b + 1)
r
, and (a + 1, b + 1)
r
.
After finding all edge-vertices, it is possible to
compute the vertex-vertices. Vertex-vertices are in
fact existing vertices at the coarser resolution trans-
lated to new positions. When (a, b)
r
is a regular ver-
tex, the involving neighboring vertices in the vertex-
vertex mask can be easily found. As demonstrated in
Fig 7 (e), we need face vertices with indices (2a +
1, 2b + 1)
r+1
, (2a − 1, 2b + 1)
r+1
, (2a − 1, 2b − 1)
r+1
and (2a + 1, 2b − 1)
r+1
, and edge vertices with in-
dices (a −1, b)
r
, (a+1, b)
r
, (a, b+1)
r
and (a, b −1)
r
.
Using these indices and Equation 5 the position of
(2a, 2b)
r+1
can be computed.
Subdivision
[a,b]
r
(2a,2b)
r+1
(2a+2,2b)
r+1
(2a,2b+2)
r+1
(2a+2,2b+2)
r+1
(a,b+1)
r
(a+1,b+1)
r
(a+1,b)
r
(a,b)
r
(2a+1,2b+1)
r+1
(2a+1,2b+2)
r+1
(2a+1,2b+1)
r+1
(a,b+1)
r
(a+1,b+1)
r
(2a+1,2b+3)
r+1
(2a,2b)r+1
(a,b+1)
r
(a-1,b)
r
(a,b-1)
r
(2a-1,2b-1)r+1
(2a+1,2b-1)
r+1
(a+1,b)
r
(2a-1,2b+1)
r+1
(2a+1,2b+1)
r+1
(b)
(a,b+1)
r
(a,b)
r
(a+1,b)
r
(a+1,b+1)
r
[2a,2b]
r+1
(a)
(c)
(d)
(e)
Figure 7: (a) Face [a, b]
r
and its vertices. (b) Children of
face [a, b]
r
at resolution r + 1 and their vertices. ((c), (d),
(e)) Black vertices are vertices at resolution r. Orange, blue
and red vertices represent face, edge and vertex-vertices re-
spectively.
It is also necessary to handle extraordinary ver-
tices (n 6= 4). Since each step of Catmull-Clark subdi-
vision does not introduce any new extraordinary ver-
tex the set of extraordinary vertices resulting from
this subdivision correspond to the extraordinary ver-
tices of the initial connectivity map. Therefore, the
index of this kind of vertices is predictable during
subdivision. In fact, using Equation 1, given the
index of the extraordinary vertices at the first res-
olution, the index of extraordinary vertices at any
resolution r can be found. For example, extraor-
dinary vertices of the cube are: (2
r
, 0)
r
, (2
r+1
, 0)
r
,
(2
r+1
, 2
r+1
)
r
, (2
r+1
, 2
r
)
r
, (0, 2
r+1
)
r
, (2
r
, 2
r+1
)
r
, (3 ×
2
r
, 2
r+1
)
r
, (0, 3 × 2
r
)
r
, (2
r
, 3 × 2
r
)
r
, (2
r+1
, 3 × 2
r
)
r
,
(3 × 2
r
, 3 × 2
r
)
r
, (2
r
, 2
r+2
)
r
and (2
r+1
, 2
r+2
)
r
. So by
keeping track of extraordinary vertices and applying
appropriate masks to them, we can subdivide the ini-
tial polyhedra. We applied Catmull-Clark subdivision
to the cube and toroidal polyhedron. Figure 8 shows
a toroidal polyhedron at three different resolutions.
Figure 8: The toroidal polyhedron at three different
Catmull-Clark subdivision levels.
5.2 Loop Subdivision
Another common subdivision method is Loop’s
scheme (Loop, 1987). In this triangular-based
scheme, each triangular face is split to four triangles.
There are two types of masks for Loop subdivision:
edge-vertex and vertex-vertex masks. Using the nota-
tion demonstrated in Fig. 9, these masks are defined:
e
i+1
=
3
8
v
i
1
+
3
8
v
i
2
+
1
8
v
i
3
+
1
8
v
i
4
(8)
v
i+1
= (1 − nα)v
i
+ α
∑
v
i
j
(9)
α =
1
n
(
5
8
− (
3
8
+
1
4
cos
(2π)
n
)
2
) (10)
We discuss the case of neighborhood vectors for a
tetrahedron. The octahedron case is similar (note that
it is also possible to apply Loop subdivision on the
toroidal polyhedron and cube by splitting every quad
to two triangles). To apply the mask of edge-vertices
presented in Equation 8, vectors (1, 0)
r
, (1, 1)
r
and
(0, −1)
r
are needed. For vertex-vertices however, all
the neighborhood vectors presented in Section 4 (also
Fig 4) for the tetrahedron are required to find neces-
sary neighbors. Extraordinary vertices are handled
similar to Catmull-Clark. Figure 10 illustrates the
result of Loop subdivision on the initial tetrahedron.
5.3 Holes and Sharp Features
There are many objects that have sharp features and
holes. A data structure should be able to support these
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
32

e
i+1
v
i+1
v
3
i
v
2
i
v
4
i
v
1
i
Figure 9: Left: necessary neighborhood vectors for comput-
ing edge vertices. Right: necessary neighborhood vectors
for computing vertex vertices.
Figure 10: Two left figures are the tetrahedron at the second
and third resolutions. Three right figures are the cube with
sharp edges along the bottom over three successive levels of
subdivision. The last subdivided cube is depicted in another
view.
features to make realistic and useful objects. In this
section, we describe how to handle holes and sharp
features.
5.3.1 Holes
To support objects with holes, individual faces at any
arbitrary resolution are tagged as empty. As discussed
in Section 4, it is possible to find all the faces in the
resolution r + k that are children of a face at the reso-
lution r. Using this property, all children of an empty
face and its related vertices are marked as empty in
further resolutions. Once we render the mesh, empty
faces and their vertices (except the vertices of the
boundary) are ignored. A cubic B-spline subdivi-
sion mask can be applied to the edges (vertices of the
boundary) of these holes. Figure 11 shows a cube
with three holes at three successive levels of subdivi-
sion.
5.3.2 Sharp Features
To support sharp features, we use the method de-
scribed in (DeRose et al., 1998) and (Hoppe et al.,
1994) for Catmull-Clark and Loop schemes respec-
tively. In general, for objects that have sharp features,
there are three kinds of vertices. Normal vertices, ver-
tices with no sharp edges; creases, vertices with two
sharp edges that a cubic B-Spline mask should be ap-
plied to them; and corners, vertices with more than
two sharp edges whose positions are changed.
Consider a sharp edge between (a, b)
r
and (a +
1, b)
r
, after k levels of subdivision all the edges be-
tween a pair of vertices in the range (2
k
a, 2
k
b)
r+k
and
(2
k
a + 2
k
, 2
k
b)
r+k
are sharp. Therefore, vertices of
(10,22)
3
(10,20)
3
(14,20)
3
(14,22)
3
(5,11)
2
(5,10)
2
(7,10)
2
(7,11)
2
(20,44)
4
(20,40)
4
(28,40)
4
(28,44)
4
Figure 11: Top: A cube is subdivided using linear subdivi-
sion twice, three holes are made in the cube and it is subdi-
vided twice using Catmull-Clark subdivision. Bottom: The
connectivity maps of the top figures. It is possible to keep
the track of empty faces’ indices during the subdivision that
are highlighted by white blocks.
Figure 12: The evolution of a cat from a cube using direct
manipulations of vertices.
these edges are known during resolutions and a sharp
or corner mask is applied to them. Figure 10 shows
a cube with sharp edges along the bottom over three
successive levels of subdivision.
It is not necessary to tag all the sharp edges at fur-
ther resolutions. To apply different masks to sharp
features, we keep an array including all sharp features
at the coarsest resolution ((a, b)
r
). We first subdi-
vide the mesh without considering sharp tags and then
find all the sharp edges’ vertices at current resolution
(from (2
k
a, 2
k
b)
r+k
to (2
k
a + 2
k
, 2
k
b)
r+k
) and modify
their positions by the appropriate mask.
6 HIERARCHICAL MESH
EDITING
To generate a mesh, one can modify an initial polyhe-
dron, subdivide and modify, and add features to it un-
til the desired shape is achieved (Fig 12 and 13). Dur-
ing this process, one may want to go back to coarser
resolutions and makes some modifications. To mod-
ify the model at a coarser resolution, we can use
the connectivity map of the coarse resolution, mod-
ify some vertices and propagate the modification to
the current resolution using some local subdivision
masks.
Consider vertex v is modified by vector ∆v. ∆v has
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
33

Figure 13: The evolution of a fish from a subdivided cube using sketches.
local contributions at subsequent resolutions. Instead
of subdividing the entire mesh, we can determine
the contributions and modify affected vertices. Since
there are extra-ordinary vertices in the proposed poly-
hedrons, there are three types of local masks based on
the location of the modified vertex. These three cases
are: 1. a regular vertex without any direct connection
to an extraordinary vertex; 2. a regular vertex adjacent
to an extra-ordinary vertex; 3. an extra-ordinary ver-
tex. Figure 14 illustrates these possible cases for the
toroidal polyhedron. In Figure 14, the extra-ordinary
vertex has valence 3 and its subdivided vertex is high-
lighted by a red vertex when it is located in a regular
vertex’s neighborhood. Therefore, setting n to 6 and 3
in Equation 10 respectively results α
1
and α
2
shown
in Figure 14 . These possible cases can also be de-
termined using a similar method for other proposed
polyhedrons and Catmull-Clark subdivision.
Note for case 2, the extra-ordinary vertex may be
located at a different edge as shown in Fig 14. In this
situation, the local mask is rotated in such a way that
extra-ordinary vertex of the mask is matched with the
extra-ordinary vertex of the regular vertex’s neighbor-
hood.
We do not consider the case of two extra-ordinary
vertices in one neighborhood which occurs only at the
first resolution. For low resolution objects, it is effi-
cient to globally subdivide the 2D domain consider-
ing ∆v for the modified vertex and 0 for other ver-
tices. However, vertex modifications at high resolu-
tions using global subdivision need huge amount of
calculations therefore it is more efficient to apply the
local subdivision for the modification and recursively
propagate it to subsequent resolutions.
7 OTHER GEOMETRIC
MANIPULATIONS
So far, we have shown that our method can efficiently
support subdivision schemes. In general, any solitary
geometric operation on the initial connectivity map is
very simple and efficient. However, any major geo-
metric change may require a new distribution of ver-
tices in a multi scale manner. To show that the pro-
posed method can be employed in various scenarios,
S
S
S
Figure 14: Local subdivision masks foe described case.
Top: Case 1. Middle: Case 2. Bottom: Case 3. Right
figures represent the modified vertices’ locations after one
level of subdivision due to the modification of ∆v. The mod-
ification values of the colorful ovals are presented at the
right of each figure. Vertices highlighted by colorful ovals
get the same modification values as appeared near the ovals.
we use sketch-based deformation and remeshing tech-
niques to generate more complex objects.
7.1 Sketch-based Deformation
To deform a model, the positions of vertices are some-
how modified. Such modifications can be done sim-
ply using direct manipulation of vertices at any reso-
lution (see Fig 1 and 12) or using some deformation
methods. To show the capacities of our method, we
have employed the deformation technique proposed
in (Pusch and Samavati, 2010) in a sketch-based mod-
eling interface to deform an initial shape to make
more complex shapes as the one demonstrated in Fig
13.
Another benefit of our method for the sketch-
based modeling is to provide a very regular meshing
of closed, sketched curves. There are several appli-
cations in the sketch-based modeling in which a user
draws a closed curve and a 3D mesh is obtained from
the curve (Olsen et al., 2009; Nealen et al., 2007). It
is appropriate that the resulting mesh of these appli-
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
34

cations becomes regular with very low number of ex-
traordinary vertices (Nealen et al., 2009; Nasri et al.,
2009). To achieve this goal, we start with an octahe-
dron and fit its base to the sketched curve by snap-
ping vertices of the octahedron’s base to the sketched
curve (Olsen et al., 2009). The base of an octahe-
dron is a square at the first resolution. After each
level of subdivision, the base of the octahedron be-
comes smoother and can approximate the curve in a
better way. By repeating the subdividing and fitting
process, we can increase the accuracy of the stroke’s
approximation as demonstrated in Fig 15. For infla-
tion, we can use methods described in (Olsen et al.,
2009; Igarashi et al., 2007). The resulting mesh is
very regular and only has six extraordinary vertices.
Figure 15: (a) A sketched curve. (b) The base of the octa-
hedron is fit to the curve. (c) The mesh resulted from sub-
dividing and fitting process described above. (d) Mesh is
rendered using smooth shading.
7.2 Remeshing Techniques
Remeshing methods typically try to approximate a
target mesh using a simple base mesh such as a subdi-
vided polyhedron. One possible way to approximate
a general mesh is to use a method similar to (Sharf
et al., 2006). In (Sharf et al., 2006), the target mesh
is approximated using a simple base mesh (sphere).
The base mesh’s vertices are moved in the direction
of their normals (evolving process) until the distance
Figure 16: Left figures are the venus with a general mesh.
Middle and right figures are the approximation of left fig-
ures using a method similar to (Sharf et al., 2006) at two
successive levels of approximation.
between the vertices of the base mesh and the target
mesh is less than a threshold. After the evolving pro-
cess, the base mesh is locally subdivided to have a
better approximation of the target. The base mesh
again evolves and this process continues until the de-
formable model is close enough to the target mesh.
We use a similar approach but we subdivide the whole
base mesh to approximate the target mesh. Figure 16
illustrates this approach to approximate the Venus.
8 GEOMETRY IMAGES
Our connectivity map can also be used as a comple-
mentary tool for deforming, modifying and subdivid-
ing meshes resulting from geometry images (Losasso
et al., 2003; Praun and Hoppe, 2003). To apply our
proposed method on a geometry image resulting from
the spherical parameterization method, we must first
synchronize the resolutions. This means that num-
ber of vertices in the geometry image and the num-
ber of vertices of the connectivity map must be equal.
Therefore, we subdivide the initial polyhedron (con-
sistent with one that is used by the spherical parame-
terization) until we get the same resolution. Then we
use the geometry image’s data to set the vertex posi-
tions of our indices. We now are able to edit, modify
and subdivide the mesh. Figure 17 illustrates an ob-
ject obtained by geometry image’s approach before
and after applying Loop subdivision.
Figure 17: Left: an object obtained from geometry images.
Right: left figure after one level of loop subdivision.
9 SPEED EFFICIENCY
One of the most common data structures for meshes is
the half-edge (Weiler, 1985; Kettner, 1998). This data
structure needs to save edges, pairs of edges, vertices
(their location and their connection to half-edges) and
faces. In our method, the only information that must
be stored is the location of vertices and the initial con-
nectivity map’s indices. Connectivity information is
efficiently extracted from these indices.
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
35

Table 1: Number of faces in every step of Loop subdivision
of the tetrahedron and run-time of our method (connectiv-
ity map) and the half-edge. NA shows an extremely large
number.
Steps of No. of Our method Half-edge
Subdivision faces (seconds) (seconds)
1 4 0.01562 0.031
2 16 0.01562 0.031
3 64 0.01562 0.0625
4 256 0.01562 0.1093
5 1024 0.01562 0.89
6 4096 0.04687 7.29
7 16384 0.078125 185.78
8 65536 0.3125 NA
9 262144 1.375 NA
10 1048576 5.82 NA
Our proposed method is not only efficient in terms
of space, but it is also very fast in comparison with
the half-edge. To quantify the speed benefit, we com-
pare the run times needed by the half-edge and the
indexing in 10 different levels of a Loop subdivision
on a tetrahedron. The results of other polyhedrons
and Catmull-Clark subdivision are fairly similar. Ta-
ble 1 shows the run-time (CPU) of the connectivity
map and the half-edge data structure. Note the time at
step i indicates the required time to achieve resolution
i from the initial tetrahedron. It is readily apparent
that after few levels of subdivision, our method is sig-
nificantly faster than the half-edge.
Although for low resolution objects, the half-edge
may be efficient enough, there are many applications
that need very large surfaces. Medical visualization
(Taubin, 1995) (see Fig 18), Digital Earth representa-
tion (Goodchild, 2006; GeoWeb, 2011) and geometry
images (Gu et al., 2002) are examples of such applica-
tions. Using our connectivity based method, we can
significantly speed up the process of these applica-
tions.
Figure 18: A vertebra created using the proposed deforma-
tion method in (Pusch and Samavati, 2010) and the toroidal
polyhedron as the base mesh.
10 CONCLUSIONS
Using connectivity maps of the proposed polyhe-
drons, we define an indexing method for quadrilateral
and regular triangular meshes. This method is very
useful for applications that need operations such as
neighborhood finding or access to hierarchical struc-
tures resulted from subdivision schemes. The con-
nectivity information of the proposed polyhedron is
implicit in their connectivity maps and no extra infor-
mation is required. In comparison with other common
data structures such as the half-edge, our connectivity
based method provides more straightforward opera-
tions for neighborhood finding and is extremely faster
for applications that need neighborhood finding op-
erations such as subdivision schemes. Our proposed
method is not restricted to simple objects and it can
be used for remeshing general meshes, sketch-based
modeling, and editing or subdividing geometry im-
ages.
ACKNOWLEDGEMENTS
We thank David Williams-King for early assistance
and discussions. This research was supported in part
by the National Science and Engineering Research
Council of Canada and GRAND Network of Centre
of Excellence of Canada.
REFERENCES
Bunnell, M. (2005). GPU Gems 2: Programming Tech-
niques for High-Performance Graphics and General-
Purpose Computation, chapter Adaptive Tessellation
of Subdivision Surfaces with Displacement Mapping,
pages 33–40. Addison Wesley.
Catmull, E. and Clark, J. (1998). Recursively generated B-
spline surfaces on arbitrary topological meshes, pages
183–188. ACM, New York, NY, USA.
DeRose, T., Kass, M., and Truong, T. (1998). Subdivision
surfaces in character animation. In Proceedings of the
25th annual conference on Computer graphics and in-
teractive techniques, SIGGRAPH ’98, pages 85–94.
ACM.
Gargantini, I. (1982). An effective way to represent
quadtrees. Commun. ACM, 25(12):905–910.
GeoWeb (2011). Pyxis innovation.
Goodchild, M. F. (2006). Discrete global grids for digital
earth. In Proceedings of 1st International Conference
on Discrete Global Grids, March, 2000.
Gu, X., Gortler, S. J., and Hoppe, H. (2002). Geometry
images. ACM Trans. Graph., 21(3):355–361.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
36

Halstead, M., Kass, M., and DeRose, T. (1993). Efficient,
fair interpolation using catmull-clark surfaces. In SIG-
GRAPH ’93: Proceedings of the 20th annual con-
ference on Computer graphics and interactive tech-
niques, pages 35–44. ACM.
Hoppe, H., DeRose, T., Duchamp, T., Halstead, M., Jin, H.,
McDonald, J., Schweitzer, J., and Stuetzle, W. (1994).
Piecewise smooth surface reconstruction. In Pro-
ceedings of the 21st annual conference on Computer
graphics and interactive techniques, SIGGRAPH ’94,
pages 295–302. ACM.
Hormann, K., L
´
evy, B., and Sheffer, A. (2007). Mesh pa-
rameterization: theory and practice. In SIGGRAPH
’07: ACM SIGGRAPH 2007 courses, page 1. ACM.
Igarashi, T., Matsuoka, S., and Tanaka, H. (2007). Teddy:
a sketching interface for 3d freeform design. In ACM
SIGGRAPH 2007 courses, SIGGRAPH ’07. ACM.
Kettner, L. (1998). Designing a data structure for polyhedral
surfaces. In SCG ’98: Proceedings of the fourteenth
annual symposium on Computational geometry, pages
146–154. ACM.
Loop, C. (1987). Smooth subdivision surfaces based on
triangles. Department of mathematics, University of
Utah.
Losasso, F., Hoppe, H., Schaefer, S., and Warren, J. (2003).
Smooth geometry images. In Proceedings of the 2003
Eurographics/ACM SIGGRAPH symposium on Ge-
ometry processing, SGP ’03, pages 138–145. Euro-
graphics Association.
Maya (2011). Autodesk inc.
Nasri, A., Karam, W. B., and Samavati, F. (2009). Sketch-
based subdivision models. In Proceedings of the 6th
Eurographics Symposium on Sketch-Based Interfaces
and Modeling (SBIM’09), pages 53–60. ACM.
Nealen, A., Igarashi, T., Sorkine, O., and Alexa, M.
(2007). Fibermesh: designing freeform surfaces with
3d curves. In ACM SIGGRAPH 2007 papers, SIG-
GRAPH ’07. ACM.
Nealen, A., Pett, J., Alexa, M., and Igarashi, T. (2009).
Gridmesh: Fast and high quality 2d mesh generation
for interactive 3d shape modeling. In Shape Model-
ing and Applications, 2009. SMI 2009. IEEE Interna-
tional Conference on, pages 155 –162.
Olsen, L., Samavati, F., Sousa, M., and Jorge, J. (2009).
Sketch-based modeling: A survey. Computers &
Graphics, 33:85–103.
Peters, J. (2000). Patching catmull-clark meshes. In Pro-
ceedings of the 27th annual conference on Computer
graphics and interactive techniques, pages 255–258.
Praun, E. and Hoppe, H. (2003). Spherical parameterization
and remeshing. In SIGGRAPH ’03: ACM SIGGRAPH
2003 Papers, pages 340–349. ACM.
Pusch, R. and Samavati, F. (2010). Local constraint-based
general surface deformation. In Proceedings of the In-
ternational Conference on Shape Modeling and Appli-
cations (SMI 2010), pages 256–260. IEEE Computer
Society.
Samet, H. (1985). Data structures for quadtree approxi-
mation and compression. Commun. ACM, 28(9):973–
993.
Samet, H. (1990). Applications of spatial data struc-
tures: computer graphics, image processing, and GIS.
Addison-Wesley.
Samet, H. (2005). Foundations of Multidimensional and
Metric Data Structures. Morgan Kaufmann Publish-
ers Inc.
Sharf, A., Lewiner, T., Shamir, A., Kobbelt, L., and Cohen-
Or, D. (2006). Competing fronts for coarse-to-fine
surface reconstruction. In Eurographics 2006 (Com-
puter Graphics Forum), volume 25, pages 389–398,
Vienna. Eurographics.
Shiue, L.-J., Jones, I., and Peters, J. (2005). A realtime
gpu subdivision kernel. ACM Trans. Graph., 24:1010–
1015.
Taubin, G. (1995). A signal processing approach to fair sur-
face design. In Proceedings of the 22nd annual con-
ference on Computer graphics and interactive tech-
niques, SIGGRAPH ’95, pages 351–358. ACM.
Weiler, K. (1985). Edge-based data structures for solid
modeling in curved-surface environments. Computer
Graphics and Applications, IEEE, 5(1):21 –40.
Zorin, D., Schr
¨
oder, P., and Sweldens, W. (1997). Interac-
tive multiresolution mesh editing. In Proceedings of
the 24th annual conference on Computer graphics and
interactive techniques, SIGGRAPH ’97, pages 259–
268. ACM Press/Addison-Wesley Publishing Co.
CONNECTIVITY MAPS FOR SUBDIVISION SURFACES
37
