
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC
LINEARIZATION BASED ON PCA WITH OUTLIER EXCLUSION
Takahiro Mori
1
, Shinsaku Hiura
2
and Kosuke Sato
1
1
Graduate School of Engineering Sciences, Osaka University, 1-3 Machikaneyama, Toyonaka, 560-8531 Osaka, Japan
2
Graduate School of Information Sciences, Hiroshima City University, 3-4-1 Ozukahigashi, Asaminamiku, 731-3194
Hiroshima, Japan
Keywords:
Photometric Linearization, Reflection Components, Shadow Removal.
Abstract:
The photometric linearization method converts real images, including various photometric components such
as diffuse reflection, specular reflection, attached and cast shadow, into images with diffuse reflection compo-
nents only, which satisfies the Lambertian law. The conventional method(Mukaigawa et al., 2007) based on
a random sampling framework successfully achieves the task; however, it contains two problems. The first is
that the three basis images selected from the input images by the user seriously affect the linearization result
quality. The other is that it takes a long time to process the enormous number of random samples needed to
find the correct answer probabilistically. We therefore propose a novel algorithm using the PCA (principal
component analysis) method with outlier exclusion. We used knowledge of photometric phenomena for the
outlier detection and the experiments show that the method provides fast and precise linearization results.
1 INTRODUCTION
Most photometric analysis methods assume that the
input images follow the Lambertian law. It is there-
fore important to generate images with only diffuse
reflections from the input images with other photo-
metric components, such as specular reflections and
shadows.
Several methods have already been proposed
for separation of photometric components. The
dichromatic reflection model(Shafer, 1985) is often
used(Klinker et al., 1988; Sato and Ikeuchi, 1994;
Sato et al., 1997) for the separation. If the colors of
the objects are quite different from the color of the
light source, the model is very effective. However,
if the two colors are similar, the separation becomes
unstable. This method is of course not applicable for
monochromatic images.
The polarization is also useful for the separation
process. Wolff and Boult(Wolff and Boult, 1991) pro-
posed a method to separate specular reflections by
analyzing the reflected polarization, while Nayar et
al.(Nayar et al., 1993) used combined color and po-
larization clues to separate the specular reflections.
These methods, however, have a common restriction
in that they cannot handle shadows. The geometry of
the scene is useful for the analysis of specular reflec-
tions and shadows. Ikeuchi and Sato(Ikeuchi and
Sato, 1991) proposed a method to classify photomet-
ric components based on the range and brightness of
the images. A shadowed area can be distinguished us-
ing the shape of the object, but it is not easy to mea-
sure the shape of the scene even in the occluded areas.
However, there are some methods that use the
characteristics of diffuse reflection, which lies in a lin-
ear subspace. Shashua(Shashua, 1992) showed that
an image illuminated from any lighting direction can
be expressed by a linear combination of three ba-
sis images taken from different lighting directions,
and assuming a Lambertian surface and a parallel
ray. This means that an image can be perfectly ex-
pressed in a 3D subspace. Belhumeur and Krieg-
man(Belhumeur and Kriegman, 1996) showed that an
image can be expressed using the illumination cone
model, even if the image includes attached shadows.
In the illumination cone, the images are expressed by
using a linear combination of extreme rays. Georghi-
ades et al.(Georghiades et al., 2001) extended the illu-
mination cone model so that cast shadows can also be
expressed using shape reconstruction. Although any
photometric components can ideally be expressed us-
ing the illumination cone, large numbers of images
corresponding to the extreme rays are necessary.
Based on Shashua’s framework, Mukaigawa et
221
Mori T., Hiura S. and Sato K..
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC LINEARIZATION BASED ON PCA WITH OUTLIER EXCLUSION.
DOI: 10.5220/0003817202210229
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 221-229
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

al.(Mukaigawa et al., 2007; Mukaigawa et al., 2001)
proposed a method to convert real images into linear
images with diffuse components using only the ran-
dom sample consensus algorithm. The method can
also classify each pixel into diffuse, specular, attached
shadow and cast shadow areas. However, because
their method starts from three manually selected in-
put images, the result depends heavily on the im-
age selection. Their algorithm also takes a very long
time to find an adequate combination of diffuse pix-
els from an enormous set of random samples. There-
fore, in this paper, we propose a novel algorithm us-
ing the PCA (principal component analysis) method
with outlier exclusion. This method automatically
generates basis images, and the deterministic algo-
rithm guarantees much a shorter execution time. The
outliers are distinguished by using the knowledge of
photometric phenomena, and the results show that
out algorithm provides better results than those using
RANSAC-based outlier exclusion.
2 CLASSIFYING REFLECTION
USING PHOTOMETRIC
LINEARIZATION
From the viewpoint of illumination and reflection
phenomena, each pixel on the input image is classi-
fied into several areas, as shown in Fig.1. Accord-
ing to the dichromatic reflection model(Shafer, 1985)
shown in Fig.2, reflection consists of diffuse and spec-
ular reflections. While the observed intensity caused
by diffuse reflection is independent of the viewing di-
rection, specular reflection is only observed from a
narrow range close to the mirror direction of the inci-
dent light. Shadows are also classified into attached
shadows and cast shadows(Shashua, 1992). If the an-
gle between the surface normal and the light direction
is larger than a right angle, the intensity of the sur-
face is zero and is called attached shadow. If there
is an object between the light source and the surface,
the incoming light is occluded by the object. This is
called cast shadow.
In the following, we discuss the reflection phe-
nomena using a linear model of diffuse reflection.
2.1 Classification of Reflections
The Lambertian model is a most basic reflection
model of a matte surface, such as plaster. The inten-
sity of the surface is represented as
i = n · s (1)
Diffuse reflection
Specular reflection
Cast shadow
Attached shadow
Figure 1: Illumination and reflection phenomena.
Reflection
Diffuse Specular
Figure 2: Dichromatic reflection model.
where n denotes the surface property vector, which is
a product of a unit normal vector and the diffuse re-
flectance. Similarly, s represents the lighting property
vector, which is a product of a unit vector towards the
lighting direction and the brightness of the light.
In Eq.(1), if the angle between n and s is greater
than 90
◦
, the intensity i becomes negative, but, of
course, there cannot be a negative power of light. In
this case, the area on the object is observed as be-
ing attached shadow, and the intensity becomes zero
instead of the negative value. To deal with the at-
tached shadows as well as the diffuse reflections, the
following equation is commonly used(Belhumeur and
Kriegman, 1996).
i = max (n · s, 0) (2)
In contrast, as shown in Fig. 1, the angle between
n and s is smaller than 90
◦
in the area of a cast shadow.
If there is no inter-reflection, the intensities of both
shadowed areas are zero, and we can distinguish be-
tween the two shadow phenomena by using the sign
of n · s if we know the surface normal and the lighting
direction.
As shown in Fig. 2, the intensity of the specu-
lar reflection is an additional component to the dif-
fuse reflection. Therefore, the intensity at the specu-
lar reflection is always greater than the value calcu-
lated with the Lambertian model. To summarize, we
can distinguish the illumination and reflection com-
ponents using the following chart.
Diffuse i = n · s
Specular i > n · s
Attached shadow i = 0 ∩ n · s ≤ 0
Cast shadow i = 0 ∩ n · s > 0
(3)
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
222

2.2 Photometric Linearization
Shashua(Shashua, 1992) showed that if a paral-
lel ray is assumed, an image with N pixels I
k
=
(
i
(k,1)
i
(k,2)
··· i
(k,N)
)
T
of a diffuse object under
any lighting direction can be expressed using a lin-
ear combination of three basis images, (
ˆ
I
1
,
ˆ
I
2
, and
ˆ
I
3
)
taken using different lighting directions;
I
k
= c
1
k
ˆ
I
1
+ c
2
k
ˆ
I
2
+ c
3
k
ˆ
I
3
(4)
Here, let C
k
=
(
c
1
k
c
2
k
c
3
k
)
T
be a set of coefficients
of the image I
k
.
However, real images do not always satisfy Eq.(4),
because specular reflections and shadows are com-
monly observed. Therefore, in this paper, we dis-
cuss the conversion of real images into linear images
which include diffuse reflection components only.
This conversion process is called photometric lin-
earization and the converted images are called lin-
earized images. Because linearized images should
satisfy Eq.(4), all M input images could be expressed
by using linear combination of the three basis im-
ages(Shashua, 1992) as
(
I
L
1
I
L
2
·· · I
L
M
)
=
(
ˆ
I
1
ˆ
I
2
ˆ
I
3
)(
C
1
C
1
·· · C
M
)
(5)
where i
L
(k,p)
= i
(k,p)
at the pixel of diffuse reflec-
tion. In other words, i
L
(k,p)
= n
p
· s
k
is satisfied in lin-
earized images, and we can lead relationships such
that a set of basis images B =
(
ˆ
I
1
ˆ
I
2
ˆ
I
3
)
and a set
of coefficients C =
(
C
1
C
1
·· · C
M
)
can be rep-
resented as B =
(
n
1
n
2
·· · n
N
)
T
· Σ and C =
Σ
−1
·
(
s
1
s
2
·· · s
M
)
respectively, using the com-
mon 3 × 3 matrix Σ.
2.3 Classification using Linearized
Images
As described above, each pixel of the input images
can be classified into areas of diffuse reflection, spec-
ular reflection, attached shadow and cast shadow us-
ing the surface normal n and the lighting direction
s. Fortunately, we only use the product of these vec-
tors n · s, and we can also classify them by compar-
ing the pixel values of the input and linearized im-
ages, i
(k,p)
and i
L
(k,p)
respectively. The classification
does not need any additional information, such as 3D
shapes, lighting directions, or color information.
In reality, captured images are affected by various
types of noise. For example, imaging devices produce
a dark current even if the intensity of the scene is zero.
Also, the pixel intensity values are not perfectly linear
Figure 3: Criterion for photometric classification.
Figure 4: Specular lobe arise around specular peak.
in actual sensors, and so we often model these noises
sources with additive and multiplicative noise models.
As shown in Figure 3, we classify each pixel with
the following criteria.
Specular R. i
(k,p)
> i
L
(k,p)
∗ T
1
∩ i
(k,p)
> i
L
(k,p)
+ T
2
Attached S. i
(k,p)
< T
s
∩ i
L
(k,p)
≤ 0
Cast S. i
(k,p)
< T
s
∩ i
L
(k,p)
> 0
Diffuse R. otherwise
(6)
The thresholds T
1
and T
2
shown in Fig.3 are used
to check the equality of i
(k,p)
and i
L
(k,p)
with certain
multiplicative and additive noises. The t hreshold T
S
is
used to distinguish shadows. These thresholds can be
determined through experiments with real images. In
the linearization algorithm described below, we grad-
ually decrease these thresholds to exclude the outliers
properly.
2.4 Handling Specular Lobe
As mentioned in section2.1, the intensity observed at
specular reflection points is greater than that at the
points with diffuse reflection only. However, in real-
ity, the difference is not always sufficiently large, and
the thresholds T
1
and T
2
against noise will improp-
erly include specular reflections to the inliers. More
specifically, this phenomenon is commonly observed
at specular lobes. As shown in Fig.4, specular lobes
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC LINEARIZATION BASED ON PCA WITH OUTLIER
EXCLUSION
223
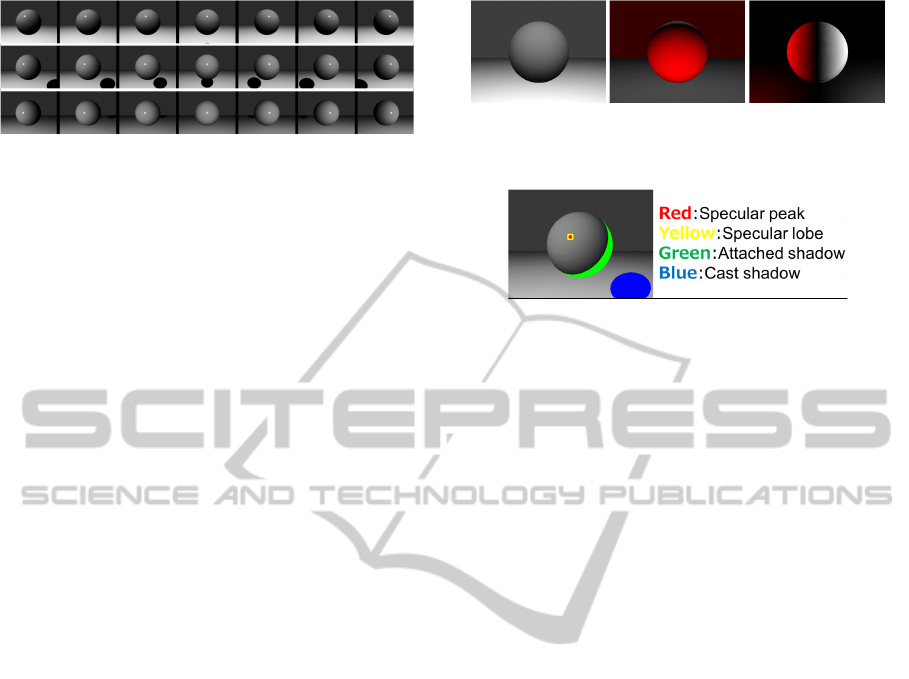
Figure 5: Input images.
surround the specular peaks, so we use spatial infor-
mation to exclude such areas. While the lineariza-
tion method using PCA described in the next section
does not use the information about the neighboring
relationships between pixels, we can exclude the er-
roneous area by increasing the area of the specular
peaks by using the dilation operation. It is there-
fore important not only to exclude outliers during lin-
earization, but also to use classification of optical phe-
nomena to expand the specular reflection area only.
3 PHOTOMETRIC
LINEARIZATION USING PCA
In this section, we present our linearization algorithm
derived from principal component analysis (PCA).
More specifically, we combine an outlier exclusion
process based on the classification of photometric
phenomena with repetitive PCA.
3.1 Algorithm
The following is the process for our linearization al-
gorithm.
(A) Initialize.
For the photometric linearization, multiple images
I =
(
I
1
I
2
·· · I
M
)
, M > 3 as shown in Fig.5
are taken using different lighting directions. While
taking these images, the camera and the target ob-
jects should be fixed, and the information about the
3D shape, the lighting direction and the surface re-
flectance is not necessary. As an initialization, the
input images are copied to the buffer of the inlier im-
ages, I
IN
=
(
I
IN
1
I
IN
2
·· · I
IN
M
)
.
(B) Calculate Three Basis Images using PCA.
In the conventional method(Mukaigawa et al.,
2007), three manually selected images are converted
into linearized images using the RANSAC algo-
rithm(Fischler and Bolles, 1981). However, as dis-
cussed earlier, this method has a problem in that the
quality of the result depends heavily on the image se-
lection. In contrast, we use all images to calculate the
Figure 6: Three basis images (red color represents negative
value).
Figure 7: Classification of photometric components.
linearized image using PCA. More specifically, we
calculate the 1st, 2nd, and 3rd principal components
B =
(
ˆ
I
1
ˆ
I
2
ˆ
I
3
)
of the matrix I
IN
by analyzing the
eigenvectors of the covariance matrix I
IN
I
IN
T
without
subtracting the mean of the input images. Because the
principal components are orthogonal to each other,
we can obtain linearly independent basis images as
shown in Fig.6, where negative values are shown in
red.
(C) Generate Linearized Images.
The coefficients of the linear combination C are
determined by minimizing the root mean square er-
rors between the input and linearized images as
C = B
T
I
IN
(7)
because B is the orthonormal basis and B
T
B = I. The
linearized images are then calculated by using the ba-
sis images and coefficients,
I
L
= B · C (8)
(D) Classification of Photometric Components.
As described in section 2.3, each pixel of each
input image is classified into four photometric com-
ponents, diffuse, specular peak, attached shadow and
cast shadow, by comparing the pixel values of the in-
put image i
(k,p)
and the linearized image i
L
(k,p)
based
on the photometric classification criterion Eq.(6), as
shown in Fig.3.
(E) Extension to Specular Lobe Area.
As shown in Fig.4, specular lobes arise around
specular peaks. Therefore, pixels around the specu-
lar peak area are classified as outliers by the specular
lobe. Fig.7 shows an example of classification for a
scene with a sphere.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
224
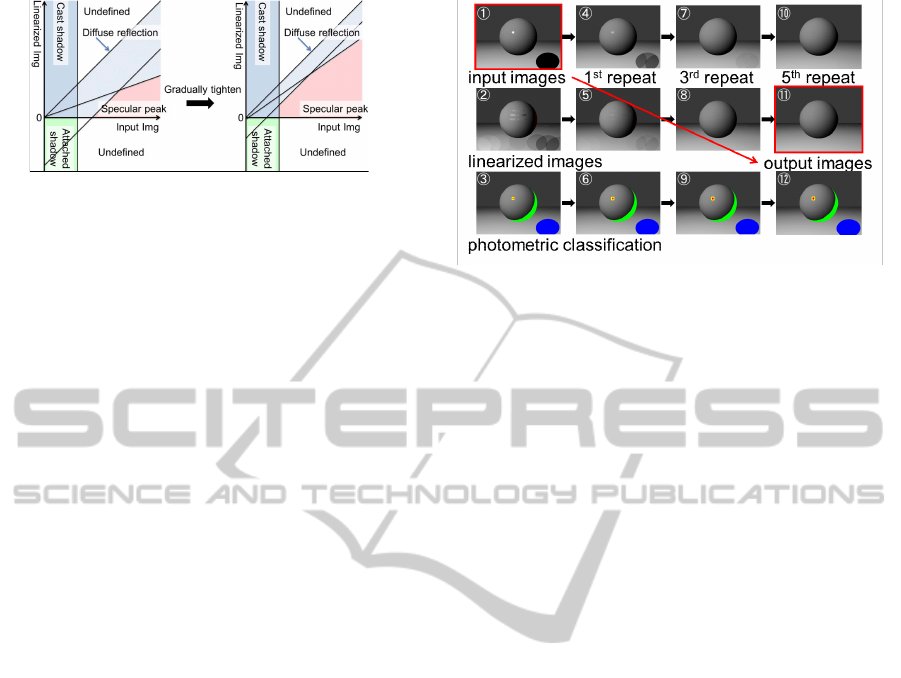
Figure 8: Tightening thresholds with each iteration.
(F) Pixel Value Replacement. Pixels affected by
nonlinear illumination and reflection phenomena
should be excluded as outliers for the next iteration
of the PCA calculation,
i
IN
(k,p)
= i
(k,p)
pixel of diffuse reflection
i
IN
(k,p)
= i
L
(k,p)
pixel of specular reflection,
specular lobe,
attached and cast shadows
(9)
(G) Tighten Thresholds and Iterate.
The algorithm starts from very loose thresholds to
exclude the explicit outliers only. If such evident out-
liers are removed, the result of the next calculation
becomes closer to the correct answer. Therefore, at
this stage, thresholds T
1
and T
2
are slightly tightened
towards the values determined for the sensor’s noise
level, as shown in Fig.8. Then, the process sequence
from (B) to (G) is repeated until the thresholds reach
the predetermined minimum values.
3.2 Example
Here, we show an example of each step of the lin-
earization process for the input image shown in Fig.5.
In Fig.9, 1
⃝
shows one of the input images. Because
the initial image contains nonlinear components, the
linearized images calculated by step (C) contain ar-
tifacts, as shown in 2
⃝
. By using the classification
result shown in 3
⃝
, the pixel values at the outlier pix-
els of image 1
⃝
are replaced by a linearized image
2
⃝
in step (F), and the next input image 4
⃝
are gen-
erated. Here, the pixel intensities in the specular and
cast shadow areas are relaxed, so the next linearized
result 5
⃝
is better than the result calculated using the
raw input images. The processes are repeated with
tighter thresholds, and finally we obtain a clear lin-
earized image
11
⃝
and correct classification results
12
⃝
.
4 EXPERIMENTS
In this section, we show several experimental results.
Figure 9: Example of the process of linearization by replac-
ing outliers.
Computationally generated images are used for the
quantitative evaluation because we can render the im-
ages without specular reflection and shadows as the
ground truth. Results using real images show the ro-
bustness and feasibility of our method for the actual
task.
4.1 Evaluation using Synthetic Images
First, we evaluated our proposed method by compar-
ison with the conventional method(Mukaigawa et al.,
2007) using synthetic images. The input images were
generated by POV-Ray ray-tracing rendering soft-
ware.
(A) Simple Convex Object.
The scene contains a sphere on a floor as shown in
Fig.5. In some images, the cast shadow of the sphere
is observed in the image on the floor. Twenty-one im-
ages were generated, using a different lighting direc-
tion for each image.
Fig.10(a) shows three manually selected images
to be converted as basis images using the conven-
tional method. As described above, the conven-
tional method requires manual selection, which heav-
ily affects the result. The selection shown in the
figure is one of the adequate selections. Fig.10(b)
shows the ground truths without specular reflection
and shadows, corresponding to the three selected im-
ages. While we obtain linearized images for all input
images in the final result, we will show these three
images in the paper for comparison purposes.
The result of linearization by the conventional
method are shown in Fig.10(c), with a corresponding
error map (Fig.10(d)). Because the algorithm based
on random sampling, the result shows some noise
caused by the probabilistic fluctuation.
Unlike the conventional method, our algorithm
does not require manual selection. Fig.10(e) shows
the three basis images B =
(
ˆ
I
1
ˆ
I
2
ˆ
I
3
)
where the red
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC LINEARIZATION BASED ON PCA WITH OUTLIER
EXCLUSION
225

color indicates negative values. Using these basis im-
ages, we can linearize any input images. Fig.10(f)
shows the results of the linearization of the three in-
put images corresponding to the manually selected
images for the conventional method. The colored er-
ror map shown in Fig.10(g) shows fewer errors when
compared to that of the conventional method. A quan-
titative evaluation is shown in Table 1.
As described above, our method has the other ad-
vantage of fast calculation time. As shown in Table 2,
our method is more than 100 times faster than the con-
ventional method. This is because the conventional
method uses the RANSAC(Fischler and Bolles, 1981)
algorithm to remove the non-Lambertian components
and runs an enormous number of iterative calcula-
tions. If the number of iterations is limited, the result
is degraded.
Table 1: Quantitative evaluation of the result.
Mean error Variance Max. error
Conventional 2.420 2.688 22
Proposed 0.831 1.933 16
Table 2: Comparison of the calculation time.
Calculation time[s]
Conventional 3.930 × 10
3
Proposed 1.424 × 10
1
Fig.10(h) shows the classification results using the
proposed method. In this figure, the red, yellow, green
and blue pixels correspond to the specular peaks,
specular lobes, attached shadows and cast shadows
respectively. It is evident that the classification has
been performed correctly.
(B) Complex Shaped Object.
We then show the results for the complex shaped
object. The object shape is that of a Stanford bunny,
as shown in Fig.11. Twenty-five images were gener-
ated, using a different lighting direction for each im-
age.
In Fig.12, we show the results of the conventional
and proposed methods in the same order as Fig.10.
In this case, the conventional method fails. Fig.12(c)
shows that the results contain the remaining specu-
lar areas and noisy values, and the error map shown
in Fig.12(d) also indicates erroneous results. In con-
trast, the proposed method offers adequate results, as
shown in Fig.12(f), which are close in appearance to
the ground truths shown in Fig.12(b). The error map
shown in Fig.12(g) also shows fewer noise compared
to that of the conventional method. Table 3 also indi-
cates a clear difference between the conventional and
(a) Images to be linearized by conventional method.
(b) Ground truths.
(c) Linearized by conventional method.
(d) Error map of conventional method.
(e) Three basis images generated by proposed method.
(f) Linearized by proposed method.
(g) Error map of proposed method.
(h) Classified by proposed method.
Figure 10: Linearization of synthetic convex object.
proposed methods. The classification results from our
method shown in Fig.12(h) also show that our results
are correct. The calculation time shown in Table4
shows similar differences to the case of the sphere
scene.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
226

Figure 11: Input images.
Table 3: Numerical evaluation of the linearization result.
Mean error Variance Max. error
Conventional 9.634 410.740 255
Proposed 3.716 28.107 151
Table 4: Comparison of the calculation time.
Calculation time[s]
Conventional 5.132 × 10
3
Proposed 1.488 × 10
1
4.2 Evaluation using Real Images
In this section we use real images taken with a cam-
era. The scene contains a pot, as shown in Fig.13.
Twenty-four images were captured, using a different
lighting direction for each one.
Fig.14(a) shows the three input images se-
lected for linearization by the conventional method.
Fig.14(c) shows the linearization result generated
by the conventional method, while Fig.14(d) shows
the linearization result generated by the proposed
method. Both results are similar, but, we can see some
noisy fluctuations on the results from the conventional
method. In contrast, the proposed method provides
smooth images without specular reflections. Figure
14(e) shows that our algorithm properly classifies the
phenomena observed on the object. The proposed
method also has the advantage of being much faster
than the conventional method as shown in Table5.
Table 5: Comparison of the calculation time.
Calculation time[s]
Conventional 8.028 × 10
3
Proposed 1.675 × 10
1
(a) Images to be linearized by conventional method.
(b) Ground truth.
(c) Linearized by conventional method.
(d) Error map of conventional method.
(e) Three basis images generated by proposed method.
(f) Linearized by proposed method.
(g) Error map of proposed method.
(h) Classified by proposed method.
Figure 12: Linearization of complex shaped object.
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC LINEARIZATION BASED ON PCA WITH OUTLIER
EXCLUSION
227
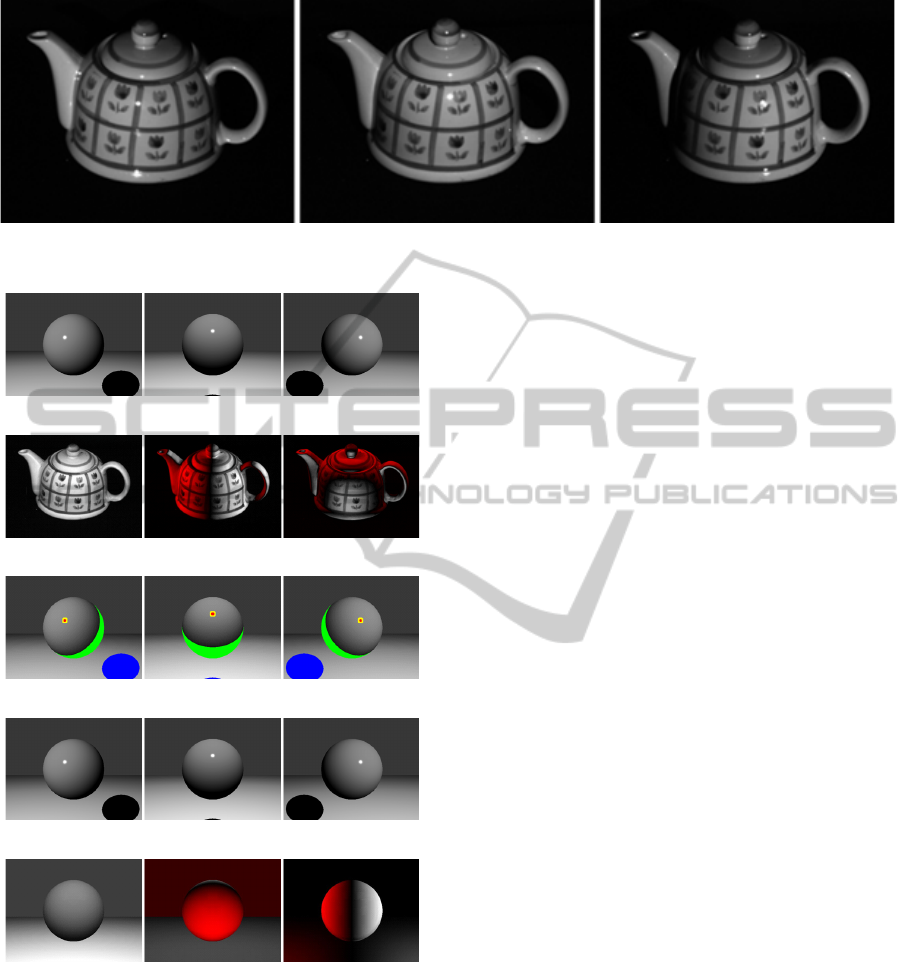
Figure 13: Input images.
(a) Images to be linearized by conventional method.
(b) Three basis images generated by proposed method.
(c) Linearized by conventional method.
(d) Linearized by proposed method.
(e) Classified by proposed method.
Figure 14: Linearization of real images.
5 CONCLUSIONS
We focused on the approach of the conventional
photometric linearization method(Mukaigawa et al.,
2007), which selects three basis images from real im-
ages, including not only diffuse reflections but also
specular reflections and shadows. The conversion ac-
curacy thus becomes unstable and is seriously influ-
enced by the selection of the three basis images, and it
also takes a long time to remove the non-Lambertian
components, e.g. the specular reflections and shad-
ows. We therefore proposed a novel pixel value re-
placement algorithm using photometric classification,
which enables us to uniquely generate three ideal ba-
sis images, including only diffuse reflections from
real images, and enables us to generate accurate ideal
images stably and quickly. We then confirmed the ef-
fectiveness of the proposed method experimentally.
ACKNOWLEDGEMENTS
The authors are grateful to Prof. Mukaigawa and Mr.
Ishii for providing their source codes and real images
presented in their paper (Mukaigawa et al,, 2007) for
our comparisons shown in Section 4. This work was
partially supported by Grant-in-Aid for Scientific Re-
search (B:21300067) and Grant-in-Aid for Scientific
Research on Innovative Areas (22135003).
REFERENCES
Belhumeur, P. and Kriegman, D. (1996). What is the set
of images of an object under all possible lighting con-
ditions? In cvpr, page 270. Published by the IEEE
Computer Society.
Fischler, M. and Bolles, R. (1981). Random sample con-
sensus: a paradigm for model fitting with applications
to image analysis and automated cartography. Com-
munications of the ACM, 24(6):381–395.
Georghiades, A., Belhumeur, P., and Kriegman, D. (2001).
From few to many: Illumination cone models for face
recognition under variable lighting and pose. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 23(6):643–660.
Ikeuchi, K. and Sato, K. (1991). Determining reflectance
properties of an object using range and brightness im-
ages. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, pages 1139–1153.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
228

Klinker, G., Shafer, S., and Kanade, T. (1988). The mea-
surement of highlights in color images. International
Journal of Computer Vision, 2(1):7–32.
Mukaigawa, Y., Ishii, Y., and Shakunaga, T. (2007). Anal-
ysis of photometric factors based on photometric lin-
earization. JOSA A, 24(10):3326–3334.
Mukaigawa, Y., Miyaki, H., Mihashi, S., and Shakunaga, T.
(2001). Photometric image-based rendering for image
generation in arbitrary illumination. In Computer Vi-
sion, 2001. ICCV 2001. Proceedings. Eighth IEEE In-
ternational Conference on, volume 2, pages 652–659.
IEEE.
Nayar, S., Fang, X., and Boult, T. (1993). Removal of
specularities using color and polarization. In Com-
puter Vision and Pattern Recognition, 1993. Proceed-
ings CVPR’93., 1993 IEEE Computer Society Confer-
ence on, pages 583–590. IEEE.
Sato, Y. and Ikeuchi, K. (1994). Temporal-color space anal-
ysis of reflection. JOSA A, 11(11):2990–3002.
Sato, Y., Wheeler, M., and Ikeuchi, K. (1997). Object shape
and reflectance modeling from observation. In Pro-
ceedings of the 24th annual conference on Computer
graphics and interactive techniques, pages 379–387.
ACM Press/Addison-Wesley Publishing Co.
Shafer, S. (1985). Using color to separate reflection com-
ponents from a color image. Color Research and Ap-
plications, 10(4):210–218.
Shashua, A. (1992). Geometry and photometry in 3D visual
recognition. PhD thesis, Citeseer.
Wolff, L. and Boult, T. (1991). Constraining object features
using a polarisation reflectance model. IEEE Trans.
Patt. Anal. Mach. Intell, 13:635–657.
SHADOW AND SPECULAR REMOVAL BY PHOTOMETRIC LINEARIZATION BASED ON PCA WITH OUTLIER
EXCLUSION
229
